Vous aimerez peut-être aussi
- Synthese Pour Utc 502Document7 pagesSynthese Pour Utc 502Allan Piquionne100% (1)
- TD Advanced OSDocument8 pagesTD Advanced OSrodrigue ntchounkeu100% (1)
- Epreuve Pratique de DéveloppementDocument2 pagesEpreuve Pratique de Développementlix BorelPas encore d'évaluation
- Chap2 SE ProcessusDocument34 pagesChap2 SE Processusمسيطر AraPas encore d'évaluation
- SE Gestion MemoireDocument6 pagesSE Gestion MemoireFadwa ZedPas encore d'évaluation
- Chapitre 4-1Document4 pagesChapitre 4-1Georges Le Mignon OlePas encore d'évaluation
- MAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsD'EverandMAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsPas encore d'évaluation
- Leçon 1.la Structure D'un SEDocument4 pagesLeçon 1.la Structure D'un SEradia ganaPas encore d'évaluation
- Systèmes D'exploitation I: Chapitre II: La Gestion Des ProcessusDocument63 pagesSystèmes D'exploitation I: Chapitre II: La Gestion Des ProcessusAdhem NaijiPas encore d'évaluation
- Exam-Arch 2010Document6 pagesExam-Arch 2010abir cherifPas encore d'évaluation
- Chapitre III Interruptions 4x1Document11 pagesChapitre III Interruptions 4x1사라SaraPas encore d'évaluation
- l2 Info Corrigé Architecture Des OrdinateursDocument3 pagesl2 Info Corrigé Architecture Des OrdinateursJai AbdoPas encore d'évaluation
- La Pagination, La Segmentation Et La Mémoire Virtuelle PDFDocument11 pagesLa Pagination, La Segmentation Et La Mémoire Virtuelle PDFLePrincePas encore d'évaluation
- Cours Système D'exploitation1Document79 pagesCours Système D'exploitation1saadiPas encore d'évaluation
- TD Systèmes D EXPLOITATIONDocument2 pagesTD Systèmes D EXPLOITATIONmamadou dioufPas encore d'évaluation
- 03 Gestion de La Memoire2pDocument29 pages03 Gestion de La Memoire2pRad GhrPas encore d'évaluation
- Algorithmes de RemplacementDocument11 pagesAlgorithmes de RemplacementGeorges Le Mignon OlePas encore d'évaluation
- Gestion Des ProcessusDocument159 pagesGestion Des ProcessusSafae Belkhyr100% (1)
- Ch2 CH3 - Système de FichiersDocument16 pagesCh2 CH3 - Système de FichiersNazha TaghzoutiPas encore d'évaluation
- CH 2 INF2610 Hiv 19Document49 pagesCH 2 INF2610 Hiv 19Colmain NassiriPas encore d'évaluation
- Cours SysDocument52 pagesCours SysFaress MannPas encore d'évaluation
- Cour 1 IhmDocument21 pagesCour 1 IhmIkram MeriemPas encore d'évaluation
- Gest I On Mémoire Aut 12Document16 pagesGest I On Mémoire Aut 12عائدة مخلوفPas encore d'évaluation
- Chapitre 1Document25 pagesChapitre 1bouk omraPas encore d'évaluation
- TP 3: Gestion Des Processus: 1. Environnement de TravailDocument11 pagesTP 3: Gestion Des Processus: 1. Environnement de TravailsalmaPas encore d'évaluation
- Ds Se 2016Document5 pagesDs Se 2016mouradPas encore d'évaluation
- Chap6 EntréesSortiesDocument39 pagesChap6 EntréesSortiesJuba MadriPas encore d'évaluation
- CPCG TD1Document2 pagesCPCG TD1Bella SalimaPas encore d'évaluation
- Cours SE Complet PDFDocument90 pagesCours SE Complet PDFalonsop100% (1)
- TD4 Gi1Document3 pagesTD4 Gi1Sourour Kraiem100% (1)
- Cours SE - Chapitre1Document31 pagesCours SE - Chapitre1Mabrouka Chouchane Ep Jaidi100% (1)
- TD Interblocage 2021Document4 pagesTD Interblocage 2021chaouki Ague100% (1)
- Cours Système DexploitationDocument24 pagesCours Système DexploitationbilalPas encore d'évaluation
- TD OrdonnancementDocument4 pagesTD OrdonnancementbenfatahPas encore d'évaluation
- Controle Continu 2Document2 pagesControle Continu 2Julie KOBONA100% (1)
- DBAingTD3v1 Oracle Khaled JouiniDocument2 pagesDBAingTD3v1 Oracle Khaled JouiniinfcomPas encore d'évaluation
- TD1 Se1Document3 pagesTD1 Se1Taiga KagamiPas encore d'évaluation
- 0324 Systeme Exploitation OsDocument571 pages0324 Systeme Exploitation OsDARBER SIXPas encore d'évaluation
- Examen OS 2022Document2 pagesExamen OS 2022Molka TouijinePas encore d'évaluation
- Architecture de Base D'un Ordinateur Premiere PartieDocument52 pagesArchitecture de Base D'un Ordinateur Premiere PartieElena GlPas encore d'évaluation
- Theoreme CAPDocument8 pagesTheoreme CAPjawad iounoussePas encore d'évaluation
- TP SemaphoresDocument2 pagesTP Semaphoresعضوش محمدPas encore d'évaluation
- Examen AO Corrig Univ Guelma 2018Document6 pagesExamen AO Corrig Univ Guelma 2018Siaka Dycosh BertePas encore d'évaluation
- TD5 MémoireDocument2 pagesTD5 Mémoireamine.besrour5214100% (2)
- Chapitre 01 Introduction Au Système D'exploitation VDocument14 pagesChapitre 01 Introduction Au Système D'exploitation VOlfa SAIDIPas encore d'évaluation
- TD Gest MemDocument3 pagesTD Gest MemYan BelingaPas encore d'évaluation
- Devoir À RendreDocument2 pagesDevoir À Rendrezakaria zezezzePas encore d'évaluation
- Expose Allocation MemoireDocument17 pagesExpose Allocation MemoireNYAMI MBITHEPas encore d'évaluation
- TD1 Correction PDFDocument9 pagesTD1 Correction PDFhamzaPas encore d'évaluation
- Sujet TD TP1Document8 pagesSujet TD TP1Merry MPas encore d'évaluation
- Memoire Caracteristique Hierarchie Des Memoires Memoire CacheDocument20 pagesMemoire Caracteristique Hierarchie Des Memoires Memoire CacheousmanePas encore d'évaluation
- Serie de TD 1Document2 pagesSerie de TD 1Colmain NassiriPas encore d'évaluation
- Un - Syst - Me - Microprocesseur - PDF Filename - UTF-8''Un Système À MicroprocesseurDocument11 pagesUn - Syst - Me - Microprocesseur - PDF Filename - UTF-8''Un Système À MicroprocesseurLynda MOKRANIPas encore d'évaluation
- Fiche TD N°3Document2 pagesFiche TD N°3Eléonore Elsa100% (1)
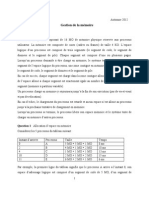
- Corrigé Type Interrogation Novembre 2013Document6 pagesCorrigé Type Interrogation Novembre 2013Samir MOUHOUBIPas encore d'évaluation
- Correction TD Systeme EmbarqueDocument1 pageCorrection TD Systeme EmbarqueIbr SaidPas encore d'évaluation
- Chapitre 4 Fouille de DonnéesDocument30 pagesChapitre 4 Fouille de DonnéesMariem SelmiPas encore d'évaluation
- TP2 Prolog 2013Document2 pagesTP2 Prolog 2013manelPas encore d'évaluation
- CORRIGE EXAMENJanvier2017Document4 pagesCORRIGE EXAMENJanvier2017Sel Ma100% (1)
- SE2007 Intro PDFDocument20 pagesSE2007 Intro PDFhoudinix*Pas encore d'évaluation
- LMD 2016-2017 PDFDocument5 pagesLMD 2016-2017 PDFAssia NourPas encore d'évaluation
- ExempleDocument14 pagesExempleIhssane MarounePas encore d'évaluation
- UE Cybersecurite-TP DVWA v0.6Document58 pagesUE Cybersecurite-TP DVWA v0.6Pape Mignane FayePas encore d'évaluation
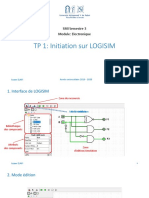
- TP 1: Initiation Sur LOGISIM: SMI Semestre 3 Module: ElectroniqueDocument26 pagesTP 1: Initiation Sur LOGISIM: SMI Semestre 3 Module: ElectroniqueABDERRAHMANE DERMOUNPas encore d'évaluation
- Presentation de L'expose Orale de Compte Rendu Du Stage HaitamDocument23 pagesPresentation de L'expose Orale de Compte Rendu Du Stage Haitamwabouzzine007Pas encore d'évaluation
- Devoir de Contrôle N°1 - Informatique - 3ème Mathématiques (2012-2013) MR Layouni KaisDocument3 pagesDevoir de Contrôle N°1 - Informatique - 3ème Mathématiques (2012-2013) MR Layouni KaisNour Ayedi100% (2)
- Fonctions Langage C PDFDocument21 pagesFonctions Langage C PDFsoufyane el ouahabiPas encore d'évaluation
- Implementation AutomatesDocument5 pagesImplementation Automatesibou yaraPas encore d'évaluation
- Cours2 Les Composants de SQL ServerDocument8 pagesCours2 Les Composants de SQL ServerAmel ourahmounePas encore d'évaluation
- 470 702 119f v13 User Mode 3010 15Document19 pages470 702 119f v13 User Mode 3010 15Yacine GraragePas encore d'évaluation
- CI11 4 1 TP Bureauadistance - EleveDocument8 pagesCI11 4 1 TP Bureauadistance - ElevePhilippeTavernierPas encore d'évaluation
- Bellout Mohamed Mehdi: Profil EducationDocument1 pageBellout Mohamed Mehdi: Profil EducationMohamed Mehdi BelloutPas encore d'évaluation
- mali-jo-2023-36Document40 pagesmali-jo-2023-36sagaraismaila8Pas encore d'évaluation
- Cours MicroservicesDocument18 pagesCours MicroservicesBochra ArfaouiPas encore d'évaluation
- Canon mf740 mf746 mf744 mf742Document4 pagesCanon mf740 mf746 mf744 mf742InoleroiPas encore d'évaluation
- 01 Algo03 Ghazi IntroDocument13 pages01 Algo03 Ghazi IntroMillionard Junior PaulPas encore d'évaluation
- Fiche Suivi Activités StagiaireDocument2 pagesFiche Suivi Activités StagiaireRaisa AmagniaPas encore d'évaluation
- 3 Sys-FichDocument44 pages3 Sys-FichSalah AllouchiPas encore d'évaluation
- 14 15 TelecomN TpAAR RootDocument17 pages14 15 TelecomN TpAAR RootMarc MUSOLEPas encore d'évaluation
- Etapes D'installationDocument9 pagesEtapes D'installationferhatPas encore d'évaluation
- TP3 AngularDocument4 pagesTP3 AngularkalabichouPas encore d'évaluation
- Gestion de La MemoireDocument49 pagesGestion de La MemoireMangaPas encore d'évaluation
- Placard Concours Doctorat LMD - 2018-2019Document2 pagesPlacard Concours Doctorat LMD - 2018-2019Amine InpticPas encore d'évaluation
- Cours 6Document6 pagesCours 6Ahmed Salem Abdel VettahPas encore d'évaluation
- Examen Ccna r&Sv6 Ccna4Document7 pagesExamen Ccna r&Sv6 Ccna4ndiguidePas encore d'évaluation
- Commandes de Base MikrotikDocument4 pagesCommandes de Base MikrotikulrichulnPas encore d'évaluation
- Tp2 - Securite Wifi Wep Wpa-1Document16 pagesTp2 - Securite Wifi Wep Wpa-1Ayoub ShaitPas encore d'évaluation
- Rapport de Stage Pfsense - CopieDocument34 pagesRapport de Stage Pfsense - CopieMamindraibe FloretPas encore d'évaluation
- 03 Manipulation Des Données Sous MS ExcelDocument34 pages03 Manipulation Des Données Sous MS ExcelViperDi ABPas encore d'évaluation