Académique Documents
Professionnel Documents
Culture Documents
BAILLY Guillaume
Transféré par
Salem AkkariTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
BAILLY Guillaume
Transféré par
Salem AkkariDroits d'auteur :
Formats disponibles
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
COLE DE TECHNOLOGIE SUPRIEURE
UNIVERSIT DU QUBEC
MMOIRE PRSENT
L'COLE DE TECHNOLOGIE SUPRIEURE
COMME EXIGENCE PARTIELLE
L'OBTENTION DE LA
MATRISE EN GNIE LECTRIQUE
M.Ing.
PAR
GUILLAUME BAILLY
SIMULATION MULTI-DOMAINES D'UN SYSTME DE PROPULSION HYBRIDE
LECTRIQUE SOUS L'ENVIRONNEMENT MATLAB/SIMULINK
MONTRAL, LE 13 DCEMBRE 2006
droits rservs de Guillaume BAILLY
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
CE MMOIRE A T VALU
PAR UN JURY COMPOS DE:
M. Louis-A. Dessaint, directeur de mmoire
Dpartement de gnie lectrique 1 'cole de technologie suprieure
M. Pascal Bigras, codirecteur de mmoire
Dpartement de gnie mcanique l'cole de technologie suprieure
M. Roger Champagne, prsident du jury
Dpartement de gnie logiciel et des TI 1 'cole de technologie suprieure
M. Guy Olivier, examinateur externe
Dpartement de gnie lectrique 1 'cole polytechnique de Montral
IL A FAIT L'OBJET D'UNE SOUTENANCE DEVANT JURY ET PUBLIC
LE 6 DCEMBRE 2006
L'COLE DE TECHNOLOGIE SUPRIEURE
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
SIMULATION MULTI-DOMAINES D'UN SYSTME DE PROPULSION
HYBRIDE LECTRIQUE SOUS L'ENVIRONNEMENT MATLAB/SIMULINK
Guillaume BAILLY
SOMMAIRE
Le projet de recherche consiste modliser et simuler un systme multi-domaines
complexe sous un unique environnement de travail. Ce systme intgrant une partie
commande, une partie lectrique et une partie mcanique. En effet, la simulation
numrique est devenue une tche incontournable lors de la conception de tout nouveau
systme et dont l'objectif est la rduction de prototypes et la rduction du temps de la
phase de conception. Cet objectif ne peut tre complt que par l'utilisation d'outils
logiciels adapts qui sont bass sur la complmentarit entre les diffrents domaines.
C'est pourquoi, ce projet est ralis sous l'environnement Matlab/Simulink possdant
plusieurs modules ddis aux systmes mcaniques, lectriques et leurs commandes.
Afin de se familiariser avec 1' environnement Matlab/Simulink, le premier systme
modlis est celui de la bobineuse. Ce systme que 1' on retrouve notamment dans
l'industrie papetire consiste contrler le couple d'un moteur lectrique. Ce dernier
entranant une bobine dont l'inertie et la masse varient mesure que le papier s'enroule.
La seconde tude porte sur le systme de transmission d'un vhicule hybride lectrique
bas sur celui de la Toyota Prius (THS II). Ce systme possde en plus de sa source
d'nergie primaire provenant du moteur combustion, une source d'nergie lectrique
dlivre par une batterie.
Le systme hybride de la Toyota Prius possde une architecture appele srie/parallle.
Ce systme possde un moteur thermique (ou moteur essence) et deux moteurs
lectriques. Selon le mode de fonctionnement dsir, le moteur thermique fournit sa
puissance mcanique aux roues et/ou entrane une gnratrice permettant d'alimenter le
moteur lectrique. Ce dernier dlivrant alors un couple aux roues. Le moteur lectrique
pouvant tre aliment par la gnratrice et/ou par la batterie. Un systme de rpartition
de la puissance (train plantaire picyclodal) permet de diviser la puissance mcanique
du moteur thermique entre les roues et la gnratrice de faon utiliser chaque moteur
dans sa plage de haut rendement et ainsi augmenter le rendement nergtique du
vhicule.
Les rsultats montrent que les comportements du systme mcanique et du systme
lectrique pour chacun des modes de fonctionnement (dmarrage, conduite normale,
forte acclration, freinage, recharge de la batterie) sont respects et les caractristiques
dynamiques du vhicule (acclration, vitesse) sont proches de celles rencontres dans la
ralit. Le modle montre de plus, la complmentarit des outils logiciels de
Matlab/Simulink pour simuler des systmes lectromcaniques complexes.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
MULTI-DOMAIN SIMULATION OF A HYBRID ELECTRIC POWERTRAIN
USING MATLAB/SIMULINK
Guillaume BAILLY
ABSTRACT
The main objective of this research project is to design and simulate a multi-domain
system under a unique work environment. This system integrates a control sub-system,
an electrical sub-system and a mechanical sub-system. Indeed, the digital simulation is a
cri ti cal part in the research and design process to complete the goal of prototypes design-
cast reduction and time diminution. This objective can be fulfilled by using specifie
software tools based on the complementarity between the different domains studied. For
this reason, this project is realized under the Matlab/Simulink environment which has
different toolboxes dedicated to the simulation of mechanical and electrical systems with
their controls.
In order to be familiarized with the Matlab/Simulink environment, the first multi-domain
system designed is the winding machine. This system, used in the paper industry,
consists to control the electrical motor torque. This motor drives a coil who's inertia and
mass are increasing while the paper is winded.
The second case study is the powertrain system of a hybrid electric vehicle based on the
Toyota Prius car (THS II system). This system has an electrical power supply coming
from a battery and a primary energy source from an internai combustion engine.
The Toyota Prius architecture is called serial/parallel architecture. The system has an
internai combustion engine and two electrical motors. Depending on the desired mode of
operation, the internai combustion engine provides its mechanical power to the wheels
and/or turns the generator, which in turn, drives the motor. The electrical motor can be
supplied by the generator and/or by the battery. A power split deviee splits the power
coming from the internai combustion engine between the wheels and the generator in
order to use each motor in its high-efficiency region. Therefore, the overall powertrain
energy efficiency is increased.
The simulation has been made in order to represent the behavior of the model for
different system operation modes (starting, driving under normal conditions, sudden
acceleration, braking). The results show that the behavior of the mechanical system and
the electrical system was respected. The dynamic characteristics of the vehicle
(acceleration, speed) are coherent for this kind of vehicle. Also, the model shows the
complementarity between the Physical Modeling toolboxes to model and simulate
complex electro-mechanical systems.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
REMERCIEMENTS
Tout d'abord, je tiens remercier M. Louis-A. Dessaint, directeur de projet, pour
m'avoir propos ce projet et avoir eu confiance en moi dans la ralisation de ce travail.
Je le remercie pour la qualit de son encadrement, de son soutien tout au long de mon
programme, ainsi que de sa disponibilit. Je souhaiterais remercier galement M. Pascal
Bigras, codirecteur de projet, pour son support et l'aide qu'il m'a apport pour la
ralisation de ce projet et tout particulirement pour son aide dans la comprhension de
certains systmes mcaniques. galement je voudrais remercier M. Pierre Mercier pour
les conseils apports tout au long de ce projet ainsi que ses encouragements. Je tiens
aussi remercier les personnes du GRPCI: Jean-Nicolas, Hassan, Franois et
particulirement Olivier pour ses connaissances du logiciel Matlab et sur la simulation
des moteurs et de leurs entranements. Je tiens remercier ces personnes pour leur
soutien moral et leurs prcieux conseils. Finalement, je tiens remercier ma famille et
mes ami( e )s pour leur perptuel soutien moral et rn' avoir continuellement encourag
dans mes tudes et mes choix quand j'en ai eu besoin. Ainsi sans 1' aide de toutes ces
personnes, jamais ce projet n'aurait pu arriver son terme.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
TABLE DES MATIRES
Page
SOMMAIRE ..................................................................................................................... 1
ABSTRACT .................................................................................................................... 11
REMERCIEMENTS ........................................................................................................ iii
TABLE DES MATIRES ................................................................................................ iv
LISTE DES TABLEAUX .............................................................................................. viii
LISTE DES FIGURES ..................................................................................................... .ix
LISTE DES ABRVIATIONS ET SIGLES ................................................................. xiii
INTRODUCTION ............................................................................................................. 1
CHAPITRE 1 REVUE LITTRAIRE ............................................................................... 5
1.1 Mthodes de modlisation ......................................................................... 5
1.2 Le vhicule hybride et sa simulation .......................................................... 6
1.3 Technologies employes dans les vhicules hybrides ............................... 7
1.4 Le systme hybride de la Toyota Prius ...................................................... 7
CHAPITRE 2 PRSENTATION DE LA SIMULATION MULTI-DOMAINES ............ 8
2.1 Introduction ................................................................................................ 8
2.2 La simulation multi-domaines ................................................................... 8
2.2.1 Enjeu de la simulation multi-domaines ...................................................... 8
2.2.2 Problmes des systmes lectromcaniques .............................................. 9
2.2.3 Rsum et solution ................................................................................... 1 0
2.3 Les modules contenus dans Matlab/Simulink .......................................... 10
2.3.1 Simulink ................................................................................................... 10
2.3.2 SimPowerSystems (SPS) ......................................................................... 11
2.3.3 SimMechanics .......................................................................................... 12
2.3.4 SimDriveline ............................................................................................ 12
2.3.5 Interconnexion des modules ..................................................................... 13
2.4 Exemple d'application: la bobineuse ...................................................... 14
2.4.1 Prsentation du modle de la bobineuse .................................................. 14
2.4.2 Description du systme complet. ............................................................. 15
2.4.2.1 Le sous-systme de la machine lectrique et son entranement.. ............. 16
2.4.2.2 Le rducteur de vitesse ............................................................................. 18
2.4.2.3 Le contrleur de la bobineuse .................................................................. 19
2.4.2.4 La bobineuse ............................................................................................ 19
2.4.3 Modlisation avec le module SimMechanics ........................................... 21
2.4.4 Rsultats obtenus avec le modle SimMechanics .................................... 23
2.4.5 Comparaison des rsultats avec le modle original ................................. 25
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
v
2.5 Conclusion ............................................................................................... 27
CHAPITRE 3 LE SYSTME DE PROPULSION HYBRIDE LECTRIQUE .............. 29
3.1 Introduction .............................................................................................. 29
3.2 Dfinition et prsentation de la voiture hybride ....................................... 29
3.3 Les diffrentes architectures hybrides ...................................................... 32
3.3.1 L'architecture hybride srie ..................................................................... 32
3.3.2 L'architecture hybride parallle ............................................................... 33
3.3.3 L'architecture hybride srie/parallle ...................................................... 34
3.3.4 Choix de l'architecture pour la Toyota Prius ........................................... 35
3.4 La Toyota Prius et son systme THS II ................................................... 36
3.4 .1 Les diffrents modes de fonctionnement ................................................. 3 7
3.4.2 Dmarrage, basses et moyennes vitesses ................................................. 38
3.4.3 Conduite normale ..................................................................................... 39
3.4.4 Forte acclration ..................................................................................... 41
3.4.5 Dclration, freinage et arrt.. ................................................................ 41
3.4.6 Recharge de la batterie ............................................................................. 42
3.5 Caractristiques principales du systme THS II ...................................... 43
3.5.1 Le circuit lectrique haute tension .......................................................... .44
3.5.2 La transmission hybride et son rpartiteur de puissance ......................... .47
3.5.3 Le systme de gestion de l'nergie ......................................................... .49
3.6 Conclusion ............................................................................................... 50
CHAPITRE 4 DESCRIPTION DU MODLE SRIE .................................................... 52
4.1 Introduction .............................................................................................. 52
4.2 Le modle srie dans son ensemble et sa commande .............................. 52
4.3 Le systme lectrique ............................................................................... 54
4.3.1 Le moteur lectrique et son entranement.. .............................................. 55
4.3 .1.1 La machine synchrone aimants permanents .......................................... 57
4.3 .1.2 Onduleur triphas ..................................................................................... 60
4.3 .1.3 Contrleur ................................................................................................ 62
4.3.1.4 Commande vectorielle ............................................................................. 63
4.3.2 La gnratrice et son entranement lectrique .......................................... 64
4.3.2.1 Paramtres de la gnratrice .................................................................... 64
4.3.2.2 Rgulateur de vitesse ............................................................................... 65
4.3.3 Le circuit d'alimentation haute tension .................................................... 66
4.3.3.1 Le convertisseur CC/CC .......................................................................... 67
4.3.3.2 Le rgulateur de tension du bus CC ......................................................... 70
4.3.3.3 Le modle de batterie ............................................................................... 72
4.4 Le systme mcanique ............................................................................. 73
4.4.1 Le moteur combustion interne ............................................................... 74
4.4.2 La bote de vitesses .................................................................................. 75
4.4.3 Le diffrentiel. .......................................................................................... 77
4.4.4 La dynamique longitudinale du vhicule ................................................. 78
4.4.5 Le contact des roues avant au sol.. ........................................................... 80
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
Vl
4.5 Conclusion ............................................................................................... 82
CHAPITRE 5 RSULTATS DE SIMULATION DU MODLE SRIE ....................... 83
5.1 Introduction .............................................................................................. 83
5.2 Dfinition des rfrences des moteurs ..................................................... 83
5.3 Rsultats gnraux ................................................................................... 84
5.3.1 Bilan des vitesses ..................................................................................... 84
5.3.2 Bilan des puissances ................................................................................. 85
5.4 Analyse des diffrents modes de fonctionnement.. .................................. 87
5.4.1 Dmarrage, basses et moyennes vitesses ................................................. 87
5 .4.2 Recharge de la batterie ............................................................................. 90
5.4.3 Forte acclration ..................................................................................... 91
5.4.4 Conduite normale ..................................................................................... 92
5.4.5 Freinage .................................................................................................... 94
5.5 Temps de simulation ................................................................................ 96
5.6 Conclusion ............................................................................................... 96
CHAPITRE 6 DESCRIPTION DU MODLE SRIE/PARALLLE ............................ 97
6.1 Introduction .............................................................................................. 97
6.2 Le modle srie/parallle dans son ensemble .......................................... 97
6.3 Le sous-systme lectrique ...................................................................... 99
6.4 Le sous-systme mcanique ................................................................... 101
6.4.1 Train plantaire picyclodal: dtermination des vitesses ..................... l01
6.4.2 Train plantaire picyclodal: dtermination des couples ..................... 103
6.5 Le sous-systme de gestion de l'nergie ................................................ 104
6.5.1 Dtermination de la puissance requise ................................................... 105
6.5.2 Dtermination du mode hybride ............................................................ 107
6.5.3 Commande de couple du MCI et de vitesse de la gnratrice ............... 107
6.5.3.1 Calcul de mgn ...................................................................................... 108
6.5.3.2 Calcul de TMci ....................................................................................... 109
6.5.4
6.6
Commande de couple du moteur lectrique Tmoteur ............................... 109
Conclusion ............................................................................................. 11 0
CHAPITRE 7 RSULTATS DE SIMULATION DU MODLE
7.1
7.2
7.3
7.3.1
7.3.2
7.3.3
7.4
7.4.1
7.4.2
SRIE/PARALLLE ............................................................................. 112
Introduction ............................................................................................ 112
Dfinition des consignes ........................................................................ 112
Rsultats gnraux ................................................................................. 114
Performances dynamiques du vhicule .................................................. 115
Bilan de puissance .................................................................................. 116
Bilan du train plantaire ......................................................................... 118
Analyse des rsultats selon les diffrents modes de fonctionnement .... 121
Dmarrage, basses et moyennes vitesses ............................................... 121
Forte acclration ................................................................................... 122
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
7.4.3
7.4.4
7.5
7.6
Vll
Conduite normale et recharge de la batterie ........................................... 124
Freinage .................................................................................................. 125
Temps de simulation .............................................................................. 127
Conclusion ............................................................................................. 128
CONCLUSION .............................................................................................................. 129
RECOMMANDATIONS ............................................................................................... 131
ANNEXE 1 CARACTRISTIQUES TECHNIQUES DE LA TOYOTA PRIUS ........ 132
ANNEXE 2 PARAMTRES DU MODLE SRIE/PARALLLE ............................ 136
BIBLIOGRAPHIE ......................................................................................................... 148
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
LISTE DES TABLEAUX
Page
Tableau I Temps de simulation ................................................................................ 27
Tableau II Comparatif des diffrentes architectures hybrides lectriques ................ 36
Tableau III Paramtres du moteur lectrique .............................................................. 59
Tableau IV Paramtres de la gnratrice (modle srie) ............................................ 65
Tableau V Paramtres du moteur combustion interne ............................................ 74
Tableau VI Paramtres du modle de la dynamique du vhicule ............................... 79
Tableau VII Paramtres du modle de la dynamique de la roue .................................. 81
Tableau VIII Paramtres de la gnratrice (modle srie/parallle) ............................ lOO
Tableau IX Temps de simulation :modles srie et srie/parallle .......................... 127
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
Figure 1
Figure 2
Figure 3
Figure 4
Figure 5
Figure 6
Figure 7
Figure 8
Figure 9
Figure 10
Figure 11
Figure 12
Figure 13
Figure 14
Figure 15
Figure 16
Figure 17
Figure 18
Figure 19
Figure 20
Figure 21
Figure 22
Figure 23
Figure 24
Figure 25
LISTE DES FIGURES
Page
Interconnexion des diffrents modules ..................................................... 14
Schma d'une bobineuse .......................................................................... 15
Schma Simulink de la bobineuse ............................................................ 16
Schma structurel de la machine lectrique et de son entranement ........ 1 7
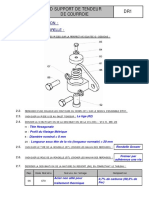
Le rducteur de vitesse ............................................................................. 18
Entres et sorties du sous-systme de contrle de la bobineuse ............... 19
Schma Simulink du bilan des forces de la bobineuse ............................. 21
Schma SimMechanics du bilan des forces de la bobineuse .................... 21
Reprsentation de la bobineuse dans le repre (x,y,z) ............................. 22
Vitesse et tension du matriau .................................................................. 24
Vitesse de rotation, couple et puissance de la bobineuse ......................... 24
Diffrences vitesse et tension du matriau ............................................... 26
Diffrences vitesse de rotation, couple et puissance de la bobineuse ...... 26
Points d'opration du moteur thermique dans le mode hybride ............... 31
L'architecture hybride srie [17] .............................................................. 33
L'architecture hybride parallle [17] ........................................................ 34
L'architecture hybride srie/parallle [17] ............................................... 35
Toyota Prius ............................................................................................. 37
Le systme de transmission de la Toyota Prius ........................................ 38
Dmarrage, basses et moyennes vitesses ................................................. 39
Conduite normale ..................................................................................... 40
Forte acclration ..................................................................................... 41
Dclration, freinage et arrt ................................................................. .42
Recharge de la batterie ............................................................................. 43
Le systme THS 11 .................................................................................... 43
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
Figure 26
Figure 27
Figure 28
Figure 29
Figure 30
Figure 31
Figure 32
Figure 33
Figure 34
Figure 35
Figure 36
Figure 37
Figure 38
Figure 39
Figure 40
Figure 41
Figure 42
Figure 43
Figure 44
Figure 45
Figure 46
Figure 47
Figure 48
Figure 49
Figure 50
Figure 51
Figure 52
Figure 53
Figure 54
x
Circuit lectrique haute tension ................................................................ 44
Schma de principe du circuit haute tension ........................................... .45
Les flux de puissance dans le circuit d'alimentation haute tension ........ .46
Train plantaire picyclodal .................................................................... 48
Comportement du train plantaire ............................................................ 48
Systme de gestion de 1' nergie de la transmission hybride .................... 50
Schma d'ensemble du modle srie ........................................................ 53
Flux de puissance dans le modle srie .................................................... 54
Schma de principe du systme lectrique ............................................... 55
Schma de principe de l'entranement lectrique du moteur ................... 56
Schma Simulink de 1' entranement lectrique du moteur ...................... 57
Transformation de Park : Repre initial et repre de Park ....................... 58
Onduleur triphas ..................................................................................... 61
Rgulateur de vitesse ................................................................................ 62
Commande vectorielle .............................................................................. 63
Dtermination de la rfrence de vitesse .................................................. 66
Circuit Simulink d'alimentation haute puissance ..................................... 67
Schma de principe d'un convertisseur CC/CC ....................................... 68
Schma quivalent des interrupteurs K1 et K2 ........................................ 69
Rgulateur du bus CC ............................................................................... 70
Tension du bus CC et valeurs des rapports cycliques a, et a
2
71
La batterie lectrique et son modle idal sous SPS ................................ 72
Le systme mcanique .............................................................................. 73
Caractristiques P = f ( w) et T = f ( w) du MCI.. .................................. 7 5
Bote de vitesses ....................................................................................... 75
Couples et vitesses en entre et sortie de la bote ..................................... 76
Diffrentiel ............................................................................................... 77
Couples et vitesses en entre et sortie du diffrentiel .............................. 78
Dynamique du vhicule ............................................................................ 80
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
Figure 55
Figure 56
Figure 57
Figure 58
Figure 59
Figure 60
Figure 61
Figure 62
Figure 63
Figure 64
Figure 65
Figure 66
Figure 67
Figure 68
Figure 69
Figure 70
Figure 71
Figure 72
Figure 73
Figure 74
Figure 75
Figure 76
Figure 77
Figure 78
Figure 79
Figure 80
Figure 81
Figure 82
Figure 83
Xl
Modle de la roue ..................................................................................... 81
Rfrence de vitesse du moteur lectrique ............................................... 84
Profils de vitesse obtenus du moteur lectrique et du vhicule ................ 85
Bilan de puissance du systme lectrique ................................................ 86
Bilan de puissance du moteur lectrique .................................................. 87
Vitesse et couple en sortie de la gnratrice ............................................. 88
Bilan de puissance au dmarrage, basses et moyennes vitesses ............... 89
Bilan de puissance lors de la recharge de la batterie ................................ 91
Bilan de puissance lors d'une forte acclration ...................................... 92
Bilan de puissance dans le cas d'une conduite normale ........................... 93
Bilan de puissance lors du freinage .......................................................... 95
Vitesse et couple du moteur lectrique ..................................................... 95
Vue d'ensemble du modle srie parallle ............................................... 98
Flux de puissance dans le modle srie/parallle ..................................... 99
Rfrence de couple du moteur lectrique ............................................. 101
Cl de la mthode Ra vigneaux ............................................................... 1 02
Algorithme gnral ................................................................................. 105
Dtermination de la puissance requise ................................................... 106
Dtermination du mode hybride : schma Simulink .............................. 107
Commande de couple du MCI et de vitesse de la gnratrice ................ 107
Commande de couple du moteur lectrique ........................................... 109
tats logiques des moteurs durant la simulation .................................... 113
Extinction et mise en marche des entranements lectriques ................. 114
Vitesse linaire du vhicule et vitesse angulaire de la couronne ........... 115
Bilan de puissance : gnratrice, batterie, moteur lectrique ................. 116
Bilan de puissance du vhicule .............................................................. 117
Bilan de puissance : MCI, gnratrice, couronne du train ..................... 118
Vitesses angulaires du train plantaire : formule de Willis .................... 119
Bilan de puissance du train plantaire .................................................... 120
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
Figure 84
Figure 85
Figure 86
Figure 87
Figure 88
Xli
Bilan de puissance lors du dmarrage ( ~ e q < 15kW) ............................ 121
Bilan de puissance lors d'une forte acclration .................................... 123
Fonctionnement en mode moteur de la gnratrice ................................ 124
Bilan de puissance en conduite normale et recharge de la batterie ........ 125
Bilan de puissance en mode freinage ..................................................... 126
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
w
MT
THS
R
v
i
CC, CA
MSAP
dqO
LISTE DES ABRVIATIONS ET SIGLES
Largeur du matriau enrouler (rn).
paisseur du matriau (rn).
Rayon de l'axe de la bobineuse (rn).
Rayon de l'axe de la bobineuse et de l'paisseur du papier enroul (rn).
Inductance mutuelle de la machine CC.
Courant de champs et courant d'armature de la machine CC.
Inertie totale de la bobineuse (kg m
2
)
Couple de charge (Nm).
Toyota Hybrid System.
Pertes joules (J).
Rsistance ( Q ).
Tension (V).
Courant (A).
Courant Continu, Courant Alternatif.
Machine Synchrone Aimants Permanents.
Phases a, b, c de la machine synchrone aimants permanents.
Tensions aux bornes de chaque enroulement statorique de la machine
synchrone aimants permanents (V).
Courants traversant chacun des enroulements statoriques de la machine
synchrone aimants permanents (A).
Axes du rfrentiel dq : d- direct, q- quadrature, 0 pour homopolaire.
Composantes orthogonales dq de l'inductance des enroulements
statoriques de la machine synchrone aimants permanents.
Flux induit par les aimants permanents du rotor dans les phases du stator
de la machine synchrone aimants permanents (Wb).
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
p
(J)
F
e,
J
p
?.ortie
N
PID
Kl,K2
L
Ec
t
K
Nombre de paires de ples.
Vitesse angulaire lectrique (radis).
Couple lectromagntique d'une machine lectrique (N.m).
Coefficient de friction visqueuse du rotor et de la charge (N.m.s).
Couple mcanique d'une machine lectrique (N.m).
Position angulaire du flux rotorique (rad).
Coefficient de l'inertie du rotor et de la charge combine (Kg. m
2
).
Puissance (W).
Puissance lectrique en sortie de 1 'onduleur triphas (W).
Courants dans les rsistances des phases a et b de l'onduleur (A).
Courants statoriques de rfrences de la MSAP (A).
Vecteurs des rfrences des courants statoriques de la MSAP.
Vitesse de rotation (r/min).
Rfrence de vitesse de rotation (t).
Courants de rfrences dans le repre de Park de la MSAP (A).
Position angulaire du flux rotorique (rad).
Gain de l'intgrateur, gain proportionnel.
Proportionnel Intgral Drive.
Interrupteurs de puissance du convertisseur CC/CC.
Condensateur du bus CC (F).
Inductance du convertisseur CC/CC (H).
Rapports cycliques des interrupteurs de puissance.
Effort de Commande du rgulateur de tension du bus CC.
Temps (s).
Raison du train plantaire.
XlV
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
INTRODUCTION
Ce projet de matrise s'insre dans le cadre du partenariat entre Transnergie
Technologie, filiale d'Hydro Qubec, l'cole de Technologie Suprieure de Montral et
la socit The Mathworks dveloppant le logiciel de calcul Matlab. L'objectif tant
de modliser un systme lectromcanique complexe sous un seul et mme
environnement de travail. L'intrt de la simulation des systmes multi-domaines est de
plus en plus important. En effet, il est particulirement intressant de pouvoir simuler
des systmes multi-domaines complexes incorporant notamment une partie commande,
une partie lectrique et une partie mcanique sous un seul et mme modle. Pour cela
des outils logiciels spcifiques et complmentaires entre chaque domaine doivent tre
utiliss.
L'accroissement de la puissance des calculateurs permet maintenant la modlisation et la
simulation de systmes complexes de plus en plus rapide et prcise qui a pour but la
diminution de prototypes physiques durant la phase de conception. Cependant, la
simulation et la modlisation des systmes lectromcaniques soulvent des problmes
de non-linarits et d'oscillations. De plus l'utilisation de contraintes de temps beaucoup
plus faibles d'un domaine l'autre peut causer des problmes sur les temps de
simulation
1
Un logiciel doit donc pouvOir prendre en compte ces diffrentes
particularits lies chaque domaine d'tude.
Le but de ce projet est par consquent de montrer travers un exemple concret que la
simulation de systmes lectromcaniques complexes incluant les diffrents problmes
cits peut tre ralise. Le logiciel utilis pour mener bien cette tude est le logiciel
Matlab/Simulink et trois de ses modules Physical Modeling.
1
Dans la littrature, ce problme est assign par l'appellation stiffproblem .
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
2
Le logiciel Matlab/Simulink est un outil de programmation et de simulation graphique. Il
dispose de diffrents modules et notamment un module spcifique aux systmes
lectriques (SimPowerSystems), un autre spcifique aux systmes mcaniques
(SimMechanics) et un dernier spcifique aux entranements mcaniques pour des
systmes de transmission et d'entranement (SimDriveline). Ces trois modules
permettent la cration de modles multi-domaines. Rpondant une demande leve de
la part des industriels et notamment de 1 'industrie automobile, le systme choisi
modliser est la partie transmission d'un vhicule hybride lectrique. Ce vhicule a la
particularit de bnficier de deux sources d'nergie. Une source d'nergie mcanique
provenant du moteur combustion interne
2
et une source d'nergie lectrique provenant
d'une batterie.
Le modle tudi simule le principe de fonctionnement du systme de propulsion de la
Toyota Prius. Le but de l'tude est d'obtenir un modle comportemental stable de ce
systme. Ce systme couvre diffrents modes de fonctionnement du vhicule
(dmarrage, conduite normale, forte acclration, freinage, recharge de la batterie). Une
gestion de 1' nergie approprie est ralise, laquelle respecte le principe de
comportement du vhicule. D la complexit d'un tel systme, certaines parties (le
modle de batterie, le systme de transmission variable gr lectroniquement, le
systme de gestion de 1 'nergie) demanderaient une tude plus approfondie dpassant le
cadre de ce mmoire et ont donc t volontairement simplifies. Les rsultats montrent
le comportement de chacun des sous-systmes et particulirement les flux d'nergie
changs.
Le projet est dvelopp en sept grandes parties. La premire partie traite de la revue
littraire qui a t effectue. Cette partie permet de dresser le bilan des travaux qui ont
t raliss dans ce domaine de recherche. Elle synthtise d'une part les articles les plus
2
Dans tout le rapport, les termes : moteur thermique, moteur essence, moteur combustion interne et
MCI, dsignent la mme chose.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
3
importants qui ont permis de mieux comprendre le projet dans son ensemble et d'autre
part les articles qui ont apport des solutions techniques pour la ralisation du modle.
Le deuxime chapitre est une prsentation de 1' environnement de travail et des outils
logiciels multi-domaines de Matlab/Simulink que sont SimPowerSystems, SimDriveline
et SimMechanics. Un premier exemple de simulation multi-domaines avec le cas de la
bobineuse est tudi afin de se familiariser avec ces modules. Ce systme est notamment
prsent dans l'industrie papetire et consiste contrler le couple d'un moteur lectrique
afin de maintenir la tension du papier constante. Le moteur faisant tourner un cylindre
dont l'inertie et la masse varient mesure que le papier s'enroule autour de ce dernier.
Le troisime chapitre prsente le principe de fonctionnement d'un vhicule hybride et
plus particulirement celui de la Toyota Prius. Cette partie traite du systme THS II de la
Toyota Prius et de son architecture hybride srie/parallle ainsi que des transferts
d'nergie mcaniques et lectriques s'effectuant pour chacun des modes de
fonctionnement dsirs. De plus, une description de haut niveau du systme lectrique,
du systme mcanique et du systme de gestion de 1' nergie est propose.
L'architecture srie/parallle tant un systme relativement complexe, l'architecture
srie est initialement aborde. Le quatrime chapitre dcrit le modle Simulink ralis et
la manire dont chaque sous-systme a pu tre modlis. Le systme lectrique contient
le moteur lectrique et son entranement, la gnratrice et son entranement, le circuit
d'alimentation haute tension et la batterie. Le systme mcanique contient le moteur
combustion, le systme de transmission du couple aux roues ainsi que la modlisation de
la dynamique longitudinale du vhicule. Le modle est test pour diffrents modes de
fonctionnement. Une analyse de ces rsultats sur un cycle de simulation de 10 s est
effectue au chapitre 5.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
4
Le sixime chapitre dcrit le modle srie/parallle au complet. Le modle srie est
repris auquel est ajout le systme de rpartition de la puissance du moteur combustion
par le train plantaire. galement un systme de gestion de 1 'nergie permettant la
commande des moteurs dans leur plage de haut rendement est ajout. Les simulations
pour les mmes modes de fonctionnement que pour le modle srie sont ralises au
chapitre 7 sur un cycle de simulation de 14 s cette fois.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
CHAPITRE 1
REVUE LITTRAIRE
La simulation multi-domaines de systmes complexes prend de plus en plus
d'importance et est notamment porte par l'volution de la puissance des calculateurs.
De nombreux travaux et tudes sont entrepris dans ce domaine. Ce chapitre a pour
objectif de dcrire brivement quelques travaux scientifiques qui ont permis de situer le
projet de recherche par rapport aux tudes dj effectues. Les articles et livres
slectionns traitent des diffrentes mthodes de reprsentation thorique de systmes
multi-domaines. Ces travaux traitent galement de la simulation de vhicules hybrides,
d'une part et de la technologie utilise dans ces vhicules d'autre part. Les travaux
prsents ci-aprs sont, parmi ceux tudis, les plus pertinents et sur lesquels le projet a
pu tre bti.
1.1 Mthodes de modlisation
Plusieurs travaux proposent des mthodes sur la modlisation de systmes multi-
domaines qui sont rgis par l'interaction mutuelle de phnomnes physiques diffrents
(lectriques, mcaniques, thermiques, hydrauliques).
L'outil bond-graph ou graphe de liaison dfini par Karnopp, Margolis et Rosenberg [6]
[7] se prsente comme un intermdiaire entre le systme physique et les modles qui lui
sont associs. Cette mthode permet de mettre en vidence les relations de cause effet
dans le systme de faon permettre plus facilement 1 'criture des quations algbriques
et diffrentielles de chaque sous-systme. La mthodologie est base sur les changes de
puissance entre les diffrents sous-systmes qu'ils soient lectriques ou mcaniques.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
6
La Reprsentation nergtique Macroscopique ou REM est une autre mthode d'analyse
de systmes lectromcaniques. Cette mthode dveloppe par Bouscayrol [1] est l
encore, une description graphique des changes d'nergie entre les sous-systmes. La
notion de transfert d'nergie selon le principe de 1 'action et de la raction est au cur de
cette dmarche. Cette dernire respecte diffrentes lois pr-tablies qui permettent de
simuler les systmes multi-machines [2]. Ainsi une structure de commande maximale
(SCM) est dduite des rgles d'inversion et permet d'tre rapidement dfinie.
1.2 Le vhicule hybride et sa simulation
Le systme choisi pour illustrer la simulation multi-domaines est celui du vhicule
hybride lectrique. Dans l'article de Emadi, Kaushik et Sheldon [8], les auteurs rsument
les diffrentes architectures hybrides actuellement possibles. Ce type de vhicule
possde un important avantage par rapport une automobile classique ou compltement
lectrique. Outre sa faible consommation d'essence, il permet de disposer d'excellentes
performances dynamiques. Ainsi les vhicules hybrides lectriques permettent d'obtenir
un rendement nergtique de l'ordre de 30-40% comparativement aux 10-15% des
vhicules conventionnels. L'architecture srie/parallle semblant tre la plus
performante dans ce domaine. L'lment le plus important tant le rpartiteur de
puissance (train plantaire) associ au systme de gestion de l'nergie.
Plusieurs travaux ont tent une approche de la simulation de ce type de vhicule. Dans
l'article de Butler, Mehrdad, Preyas [9], les auteurs proposent une librairie contenant les
principaux lments d'un tel systme (moteur lectrique, gnratrice, moteur thermique,
bote de vitesses ... ) sous l'environnement Matlab/Simulink afin de simuler et tester les
diffrentes architectures. Ce systme ne fait pas intervenir les rgimes transitoires de
chaque sous-systme. Il s'agit donc d'une vision globale (de haut niveau) du problme.
Cependant d'autres travaux ont t effectus sur la simulation et mettent l'accent soit sur
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
7
le sous-systme de gestion de l'nergie [3] soit sur les systmes lectriques et leurs
modlisations (batterie, moteur synchrone) [ 1 0].
1.3 Technologies employes dans les vhicules hybrides
De nombreux travaux voquent la technologie employe pour chacun des sous-systmes
et ce selon le type d'architecture utilise [11]. Du point de vue lectronique de
puissance, un des lments importants est le convertisseur CC/CC et son bus CC
rguler. Sa tension doit alors rester constante quelque soit la source et la charge. Des
convertisseurs entres multiples (batterie, super-condensateur, gnratrice) [23]
peuvent tre employs. Des commandes spcifiques de moteur synchrone comme la
commande vectorielle sont galement utilises [12]. Un autre lment trs important
dans une architecture srie/parallle, est le train plantaire permettant d'additionner ou
de diviser des couples sans imposer de vitesses de rotation aux lments connects [ 17].
Enfin, l'lment le plus important est le systme de gestion de l'nergie permettant
d'obtenir le meilleur rendement nergtique possible. Cette gestion de l'nergie est
base principalement sur la vitesse du vhicule ainsi que sur la position de la pdale
d'acclration [21], mais galement sur le climatiseur ou le rapport de rduction de la
bote de vitesses [19]. Des algorithmes bass sur les systmes flous en temps rel
peuvent aussi tre utiliss [20].
1.4 Le systme hybride de la Toyota Prius
Le systme modlis afin d'illustrer la simulation multi-domaines est celui de la
l'architecture hybride srie/parallle que l'on retrouve dans la Toyota Prius. Les
documents de Toyota [17] et de Kawahashi [18] dcrivant le systme au complet ainsi
que l'article de Jeanneret, Trigui, Badin et Harel [3] sur la proposition d'un systme de
gestion de l'nergie de la Prius permirent de mieux comprendre son fonctionnement. Ce
projet s'appuie surtout sur ces documents.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
CHAPITRE2
PRSENTATION DE LA SIMULATION MDL TI-DOMAINES
2.1 Introduction
Le prsent chapitre a pour objectif de prsenter les enjeux ainsi que les problmes de la
simulation multi-domaines et galement de prsenter les outils logiciels contenus dans
Matlab/Simulink qui ont t utiliss lors de ce projet. Un premier exemple d'application
d'une bobineuse industrielle est prsent. Les rsultats obtenus pour le nouveau modle
sont compars ceux du modle original.
2.2 La simulation multi-domaines
Un systme multi-domaines est un systme faisant intervenir des comptences
acadmiques de plusieurs domaines tels que le gnie lectrique, le gnie mcanique, le
gnie industriel et le gnie logiciel. Dans cette tude, un systme multi-domaines est
dfini comme tant un systme incorporant une partie commande, une partie lectrique
et une partie mcanique.
2.2.1 Enjeu de la simulation multi-domaines
La simulation numrique de phnomnes physiques, aussi prcise et rapide que possible,
est devenue un enjeu majeur dans la phase de conception de tout systme. Cette
discipline doit faire face de nouvelles exigences du point de vue de la richesse et de la
complexit des simulations, qui doivent alors prendre en compte des aspects trs souvent
multi-domaines. Ceci est nanmoins devenu possible avec l'accroissement de la
puissance des processeurs de calculs ainsi que de la mmoire disponible. En effet, dans
une logique de comptition industrielle, la diminution du nombre de prototypes
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
9
physiques requiert des outils logiciels adapts et bass sur la complmentarit,
incorporant des connaissances qui relvent de plusieurs domaines de comptences.
2.2.2 Problmes des systmes lectromcaniques
En premier lieu, si 1 'on souhaite obtenir un modle dont le comportement est
reprsentatif de celui de la ralit, on s'aperoit que les systmes lectromcaniques ne
sont que trs rarement linaires ou stationnaires [2]. Ces systmes font notamment
apparatre des discontinuits. En lectronique de puissance notamment, 1 'utilisation
d'interrupteurs pour le fonctionnement d'une commande spcifique d'un moteur, par
exemple, peut s'avrer tre un problme. Ces interrupteurs commutant des frquences
leves comparativement aux frquences naturelles du reste du systme, augmentent le
nombre de calculs et par consquent la dure de simulation. Les constantes de temps
utilises en lectronique tant souvent beaucoup plus faibles que celles rencontres en
mcanique. De plus, de nombreuses non-linarits sont souvent prendre en compte
dans les systmes mcaniques telles que le cas d'une roue au contact du sol. galement,
des problmes d'oscillations et de stabilit peuvent apparatre au passage d'un domaine
l'autre. L'laboration d'une commande globale peut aussi s'avrer complexe dans sa
mise en oeuvre du fait du nombre de variables dont elle dpend. La robustesse de la
commande doit prendre en compte les erreurs de modlisation, les non-stationnarits et
les erreurs de la commande elle-mme [2].
Enfin, il faut faire attention, pour de ne pas dtriorer la prcision d'un systme, de ne
pas confondre pluridisciplinarit et interdisciplinarit. cet effet, un outil logiciel
unique pour la simulation de systmes lectriques et mcaniques serait un outil
pluridisciplinaire qui du fait de la juxtaposition des domaines, risquerait d'entraner des
hypothses simplificatrices de modlisation et d'tre responsable de l'imprcision des
rsultats obtenus. Tandis que des outils logiciels spcifiques chaque domaine, avec des
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
10
convertisseurs pour passer entre les diffrents champs de comptence permettent une
plus grande flexibilit et une moindre approximation des modles raliss.
2.2.3 Rsum et solution
C'est pour les ratsons spcifies prcdemment (vitesse de calcul, non-linarits,
stabilit, interdisciplinarit) que l'utilisation d'un logiciel de simulation adapt est donc
ncessaire. Et c'est par consquent, pourquoi il a t dcid d'utiliser 1' environnement
de Matlab/Simulink et de ses diffrents modules pour mener bien ce travail de
recherche. Ce logiciel permet la simulation en rgime transitoire des systmes
lectriques et mcaniques ainsi que la ralisation de commandes complexes.
2.3 Les modules contenus dans Matlab/Simulink
Le logiciel Matlab constitue un systme interactif et convivial de calculs numriques et
de visualisation graphique destin aux ingnieurs et aux scientifiques. Matlab voulant
dire laboratoire de matrices, il s'agit donc d'un systme base de matrices permettant de
raliser des simulations numriques fondes sur des algorithmes d'analyse numrique
[ 13]. Cet outil intgre des milliers de fonctions et diffrents modules autour du noyau
Matlab pour le calcul matriciel, le traitement de signal, le traitement d'image, les
visualisations graphiques, les rseaux de neurones, la simulation de systmes lectriques,
mcaniques entre autres.
2.3.1 Simulink
Le module Simulink est une plate-forme de conception pour la simulation de systmes
dynamiques multi-domaines base sur la modlisation. C'est un outil graphique
interactif dont la bibliothque de blocs personnalisables, permet de concevoir avec
prcision des systmes complexes multi-domaines et leurs commandes associes. Ces
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
11
blocs pouvant tre des blocs dynamiques continus et discrets (intgration, dlai
unitaire ... ), et des blocs d'algorithmes (sommes, produits ... ), des blocs structurels
(multiplexeurs, commutateurs ... ). Cet outil permet donc l'laboration de commandes
complexes pour n'importe quel systme physique. Simulink propose diffrentes
mthodes de rsolution numrique pas fixe ou pas variable.
Des modules supplmentaires tendent Simulink avec des fonctionnalits spcifiques. Il
est possible de simuler des systmes physiques dans Simulink en utilisant les modules
SimDriveline, SimPowerSystems et SimMechanics. Ces modules forment 1' ensemble
Physical Modeling. Ils proposent donc des fonctionnalits tendues permettant de
modliser des systmes lectriques et/ou mcaniques [13].
2.3.2 SimPowerSystems (SPS)
L'outil logiciel SimPowerSystems ou SPS est un des modules contenus dans Simulink.
Il s'agit d'un des modules de Physical Modeling. Il permet de modliser et de simuler
des rseaux lectriques ainsi que des systmes d'lectronique de puissance dtaills [16].
La distribution, la consommation et la gestion de la puissance dans un systme pouvant
tre simules. galement, des blocs multimtres permettent de connatre la tension ou le
courant pour n'importe quel point du circuit. SimPowerSystems inclus lui-mme
diffrentes sous librairies et notamment la librairie Electric Drives dveloppe
l'TS. Cette librairie propose des modles lectriques d'entranements courant
alternatif et continu incluant des modles dtaills de convertisseurs, de moteurs, et de
contrleurs [16].
Lors de la ralisation d'un modle SimPowerSystems, ce dernier doit imprativement
contenir le bloc Powergui pour qu'une simulation du circuit puisse se raliser. Ce
bloc contient le circuit Simulink quivalent reprsentant les quations d'tats des
diffrents lments SimPowerSystems.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
12
2.3.3 SimMechanics
Physical Modeling contient galement un module spcifique aux systmes mcaniques.
Cet outil permet de simuler des systmes mcaniques complexes composs de corps et
de joints et de leurs imposer diffrentes contraintes cintiques. Des actuateurs et des
capteurs permettent d'mettre ou de relever diffrentes caractristiques en tout point du
modle. Cet outil permet aussi la visualisation et l'animation des systmes modliss en
trois dimensions afin de rendre l'analyse plus prcise [14].
Un modle SimMechanics doit contenir imprativement quatre lments pour pouvoir
tre simul. Ces lments sont les blocs Machine Env, Ground , Joint et
Body qui forment alors une chane valide. Le bloc Machine Env permet de
connatre et de changer les caractristiques du modle mcanique (mthode de
simulation, interprtation des contraintes). Le bloc Ground reprsente un point
immobile qui sert de rfrence absolue du systme. Le bloc Joint dfinie les degrs
de libert entre un corps et le Ground ou entre deux corps. Enfin, le bloc Body
permet de dfinir les proprits d'un corps rigide (masse, inertie, proprits
gomtriques).
2.3.4 SimDriveline
Le troisime module de Physical Modeling est le module SimDriveline permettant de
modliser et de simuler la partie transmission mcanique d'un arbre d'un systme et sa
chane cinmatique. Cet outil est particulirement utilis dans les secteurs de
1 'automobile et de 1' arospatial. Le module comporte plusieurs librairies o les
diffrents lments d'un vhicule tels que la bote de vitesses, le train plantaire, le
systme d'embrayage ou le moteur peuvent tre utiliss. Il s'agit d'un outil optimis
pour simuler rapidement et simplement des systmes mcaniques de transmission en se
concentrant exclusivement sur les organes en rotation [ 15]. Le mouvement entre les
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
13
arbres de transmission n'tant possible qu'autour d'un seul axe, cela a pour effet de
rduire la complexit des modles raliss, et par consquent d'amliorer les temps de
simulation.
Les lments indispensables dans un modle SimDriveline sont les blocs Driveline
Env et Inertia . Le bloc Driveline Env , dfinit les caractristiques globales du
systme modlis. Le bloc inertia ajoute une inertie sur une ligne de transmission.
Cette transmission, par dfaut, tant parfaitement rigide et sans masse, aucun couple ne
peut y tre affect. Une inertie doit y tre rattache pour autoriser la rotation d'un corps
et du couple qui est impos sur cette ligne de transmission.
2.3.5 Interconnexion des modules
Il a t expliqu dans la partie 2.2.2 l'importance de l'interdisciplinarit entre les
domaines. Les diffrents modules contenus dans Matlab/Simulink sont spcifiques
chaque discipline, comme l'est SimPowerSystems pour les rseaux lectriques par
exemple. Cependant pour chaque module, il existe des blocs permettant de passer d'un
module l'autre (figure 1) en passant au pralable dans le domaine Simulink. Il est
impossible de passer du monde SPS au domaine SimDriveline, par exemple, sans passer
par le domaine Simulink.
Dans SPS, il s'agit principalement de sondes de courant ou de tension et de sources de
courant ou de tension commandes. Dans SimDriveline et SimMechanics il s'agit de
capteurs de couple ou de vitesse et d'actuateurs. Ainsi sous un seul modle il est
possible d'avoir des lments SPS, SimDriveline et SimMechanics.
La figure ci-aprs reprsente galement les diffrents lments ncessaires afin d'obtenir
un modle valide dans chaque domaine.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
Domaine
SimPowerSystems
(PowerGui)
Domaine
SimMechanics
(Machine Env,
Ground, Joint, Body)
Sondes de courant ou de tension
Sources de 1 ou de U contrles
Capteurs de couple ou de vitesse
L-----------' Actuateurs de couple ou de vitesse
Domaine
SimDriveline
(Driveline Env,
Inertia)
Capteurs de couple ou de vitesse
Actuateurs de couple ou de vitesse
Domaine
Simulink
(Mthode de
rsolution, pas de
calcul)
Figure 1 Interconnexion des diffrents modules
2.4 Exemple d'application :la bobineuse.
14
Le premier exemple d'application industrielle modlis est celui de la bobineuse. Ce
premier cas a permis de se familiariser avec 1' environnement Matlab/Simulink et ses
diffrents modules et plus particulirement avec SimMechanics pour la simulation de
systmes mcaniques et SimPowerSystems pour la simulation de rseaux lectriques.
2.4.1 Prsentation du modle de la bobineuse
Le modle de la bobineuse est un des exemples contenus dans Matlab/Simulink. Ce cas
est particulirement intressant puisqu'il comporte un systme lectrique, un systme
mcanique et un systme de commande. En effet une caractristique importante de ce
genre de systme est que la force applique sur le matriau enroul doit rester constante,
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
15
ce qui implique que le couple du moteur doit tre rgul puisqu'au fur et mesure que le
matriau s'enroule, le rayon de la bobine augmente et son inertie et sa masse par
consquent augmentent galement. L'hypothse choisie est que le matriau enrouler
est dbit une vitesse constante de 5 mis.
Cette partie traite en particulier de la modlisation de la partie mcanique, c'est--dire la
partie seulement modifie et modlise en utilisant des blocs SimMechanics. Le moteur
et son entranement lectrique ainsi que le contrle du systme ne sont que
succinctement abords.
2.4.2 Description du systme complet.
Le systme est donc une bobineuse utilise notamment dans l'industrie papetire et
reprsente par la figure 2 o West la largeur du matriau enrouler, MT son
paisseur, ' le rayon de l'arbre ou noyau de la bobineuse et r
2
, le rayon de l'axe et de
1' paisseur du papier enroul.
. 1 ,
1 J /
1 1 /
' 1 1
w 1 f
1 ' J
1 t' /( """"._,
/ 1' MT .t \ f 1
1
' ,\ ..1
Figure 2 Schma d'une bobineuse
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
16
Le schma Simulink du systme complet est celui de la figure 3 comprenant quatre sous-
systmes:
le sous-systme de la machine lectrique et de son entranement;
le rducteur de vitesse auquel le moteur est connect;
le contrleur de la bobineuse;
le sous-systme de la bobineuse.
Roll Radius r2 (rn) 1 01
ln m
Mlterial Miss (kg)
----+
Surface Speed (m's) Load Torque External Load torque (N-m)
Winder nertia (Kgrrl'2)
Surface speed
Radius r2 Tension Ref
01
Surface Speed (rrls)
1
01
ln N Surface s peed
lnm/s
----+ Force Act Torque Ref
Winder Speed (rad/sec)
y
Winder Control Block
01
Total Materiallenght (rn)
ln rad/sec Torque
T_ref
Power
speed -
f+""
tiZ
Power(W)
Power
1
1
01
T_load
f..1otor Torque
,
ln Watt
DC Motor Drive
.NI
Speed
Material Tension (N)
1
01
reducer
ln Newton
f..1otor Torque filtered (N.m)
Torque
1
01
lnNm
D
Scope2
r-
D
Scope1
,..-----
--<B
Speed Winder Modal
D
rF.lLD
B
Tension
Figure 3 Schma Simulink de la bobineuse
2.4.2.1 Le sous-systme de la machine lectrique et son entranement
Ce sous-systme contient le moteur lectrique courant continu de 5 hp et son
entranement lectrique. L'entranement lectrique est compos d'un redresseur
thyristors deux quadrants aliment par une source triphase de 220 V 50 Hz.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
17
Une rgulation de couple est effectue. La rfrence de couple est ensuite transforme
en une rfrence de courant. Le moteur tant excitation spare, 1' quation reliant le
couple du moteur au courant d'armature est la suivante:
(1.1)
Cette quation faisant intervenir l'inductance mutuelle La/, le courant de champ !
1
et le
courant dans l'armature/a.
Redresseur triphas
A ----r--1
B ----.----'----1
Inductance
de lissage
Moteur
cc
Courant mesur
Contrleur _ __J .---.,.,
de courant Courant de rf.
Rfrence
14----
de couple
Figure 4 Schma structurel de la machine lectrique et de son entranement
3
Un rgulateur de courant bas sur un contrleur proportionnel intgral (PI) permet de
contrler le courant d'armature en commandant l'angle de retard l'amorage des
thyristors (figure 4). Un bloc commande du pont fournit les six impulsions de
3
Ce graphique a t tir et adapt de la documentation SimPowerSystems de Matlab/Simulink [16].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
18
gchettes ncessaires des thyristors. Le redresseur triphas fournit alors la tension
adquate pour obtenir le courant d'armature la dsir et ainsi le couple
lectromagntique demand (quation 2.1 ).
2.4.2.2 Le rducteur de vitesse
Le moteur courant continu est connect un rducteur de vitesse. Cet ensemble est
constitu de trois parties comme le montre la figure 5. Un premier en entre tournant
haute vitesse, puis 1' engrenage du rducteur de vitesse et enfin, un axe de sortie tournant
basse vitesse.
Axe haute vitesse Rducteur Axe basse vitesse
Figure 5 Le rducteur de vitesse
4
Ce rducteur rduit donc la vitesse d'entre par un facteur de 10. Les relations entre les
vitesses et les couples sont les suivantes :
(1.2)
1
T. =-T.
high lO low
(1.3)
4
Ce graphique a t tir et adapt de la documentation SimPowerSystems de Matlab/Simulink [16].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
19
mhigh :vitesse angulaire de l'axe haute vitesse (radis);
I;.;gh :couple sur l'axe haute vitesse (Nm);
w
1
ow :vitesse angulaire de l'axe basse vitesse (radis);
I;ow : couple sur l'axe basse vitesse (Nm).
2.4.2.3 Le contrleur de la bobineuse
Ce sous-systme contient un contrleur PID (Proportionnel Intgral Drive) qm
dtermine la force qui est applique sur le matriau enrouler. La sortie de ce rgulateur
est la rfrence de couple du moteur lectrique. De plus, ce sous-systme permet de
dterminer le couple de charge appliqu sur la bobineuse. Ce dernier correspondant au
produit du rayon de 1' axe plus du matriau enroul multipli par la vitesse de dfilement
du matriau. Les entres et sorties de ce sous-systme sont les suivantes :
Vitesse de dfilement
du matriau (m/s) - - - ~
Foree mesure sur
la bobineuse (Nm)
Rayon de 1 'axe et du
matriau enroul (rn)
..
Contrleur
1------. Couple de charge (Nm)
Rf. de couple (Nm)
Tension de rf.
du matriau (Nm)
Figure 6 Entres et sorties du sous-systme de contrle de la bobineuse
2.4.2.4 La bobineuse
Dans ce sous-systme, diffrentes variables lies la bobineuse et au matriau enroul
comme la vitesse de dfilement du matriau, la vitesse angulaire de la bobineuse,
l'paisseur totale du matriau enroul en autre sont calcules. Cependant, la principale
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
20
quation est celle du bilan des forces appliques sur la bobineuse. Le couple
lectromagntique de la machine est dtermin par 1' quation diffrentielle suivante :
(1.4)
- I: : couple lectromagntique du moteur lectrique (Nm ).
- J, : inertie totale de la bobineuse (kg m
2
);
- m : vitesse angulaire de la bobineuse (Nm );
- B: frottement visqueux de la bobineuse (Nm.s);
- r; : Couple de charge (Nm );
Il est noter que l'inertie totale de la bobineuse variant lentement en fonction du temps,
la drive de l'inertie totale du systme peut donc tre nglige. L'quation corrige du
couple lectromagntique de la machine devient :
dm
I: = J,-+ Bm+ r;
dt
(1.5)
Le bilan des forces appliques la bobineuse peut donc tre calcul partir de cette
dernire quation. La force applique la bobineuse tant fonction du rayon du noyau de
la bobineuse et de 1' paisseur du papier enroul r
2
ainsi que du couple de charge r;,
1' quation du bilan des forces appliques au cylindre de la bobineuse est la suivante :
T-JdJ-Bm
F= e 1
(1.6)
rz
Cette dernire quation, qui reprsente la force de tension du papier, est modlise avec
des blocs Matlab/Simulink.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
Win der lnertia kgm'2
1
MotorTorque N-m
Figure 7
21
Fcn3
-u(3)*u(2)/u(1)
Speed (rad/sec)
Angular Acceleration
Schma Simulink du bilan des forces de la bobineuse
2.4.3 Modlisation avec le module SimMechanics
Le but de cette tude est de remplacer le modle de l'quation du bilan des forces
appliques sur la bobineuse et ralis avec des lments Simulink par des lments
SimMechanics. Ce module est spcifique aux systmes mcaniques comme il a t
prcis dans la partie 2.3.2.
Le systme est donc celui d'un cylindre tournant, sur lequel diffrentes forces sont
appliques et dont l'inertie et la masse sont variables au fur et mesure que le matriau
est enroul. Le modle de la figure 7 est donc remplac par le suivant :
Product
Figure 8
material mass kg
Variable
Inertie Actuator
1--.,..-----.)
Speed (rad/sec)
.________.I)
Angular Acceleration
Winder lnertia kgm'2
1
Schma SimMechanics du bilan des forces de la bobineuse
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
22
Le systme est compos d'un cylindre ayant un seul degr de libert qui est une rotation
sur l'axez. Les diffrentes forces contenues dans l'quation (2.6) s'exercent alors sur ce
cylindre (figure 9). L'inertie et la masse de ce cylindre variant au cours du temps en
fonction de la quantit de matriau enroul.
y ..
1
- - - - - - - - - ~ x
z
Figure 9 Reprsentation de la bobineuse dans le repre (x,y,z)
La bobineuse au complet (noyau et matriau enroul) est considre comme un cylindre
dans un repre fixe (x,y,z), son centre de masse correspondant au centre du repre
(0,0,0). Son tenseur d'inertie est par consquent la matrice suivante dont les valeurs
propres sont les moments principaux de la matrice.
1 ( 2 1 2)
0 0 -m r. +-W
[ [ ~
1xy
fu J [['
0
~ J =
4
1
3
1xy 1yy 1 = 0 12 0 !m(r.2 +_!_W2) 0 (1.7)
yz
4
1
3
1xz 1yz 1zz 0
0
13
1 2
0 0 -mr.
4 1
Un tenseur d'inertie est dfini dans le bloc body du modle SimMechanics (figure
8). Cependant, ce tenseur ne peut pas tre dfini variable et doit tre constant durant la
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
23
simulation. La masse de l'objet ne peut pas tre variable non plus. La solution est alors
d'utiliser un bloc variable mass & inertia actuator qui transmet l'inertie et la masse
additionnelles du matriau enroul au cylindre. Cette liaison est quivalente relier un
second corps invisible dont l'inertie et la masse sont variables. Ce corps invisible a le
mme centre de masse que celui du cylindre, qui correspond au centre du repre (0,0,0).
On a donc un corps avec un tenseur d'inertie et une masse fixes correspondant au
tenseur d'inertie du noyau de la bobineuse et sa masse auquel est rattach un second
corps invisible dont le tenseur et la masse correspondent ceux du matriau seulement.
Le problme est que cette faon de modliser provoque des perturbations dans les
signaux autour de la valeur dsire. Ces oscillations peuvent tre considres comme des
oscillations numriques provenant de l'algorithme de calcul du module SimMechanics.
Une faon de corriger ce problme est de crer un corps dont la masse et le tenseur
d'inertie sont constants et dont les valeurs propres du tenseur sont ngligeables. Ensuite,
on y rattache, par l'intermdiaire du bloc variable mass & inertia actuator , la masse
et l'inertie de la bobineuse au complet, c'est--dire celles du noyau de la bobineuse
ajoutes celles du papier enroul.
2.4.4 Rsultats obtenus avec le modle SimMechanics
Une simulation du modle contenant des blocs SimMechanics est effectue. La figure 10
montre la vitesse de dfilement du matriau et la tension applique sur ce dernier et la
figure 11 montre la vitesse de rotation, le couple et la puissance de la bobineuse. La
simulation a t effectue pour un cycle de 25 s. Un pas de 10 f.JS est utilis qui
correspond au pas de calcul utiliser pour le bloc rducteur de vitesse. Les rfrences de
vitesse de dfilement du matriau et de la tension applique sur ce dernier sont
respectivement de 5 mis (hypothse spcifie au dpart : le matriau enrouler est
dbit une vitesse constante de 5 mis) et de 300 Nm.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
24
Vitesse de dfilement du matriau (m/s)
l
0 5 10 15 20 25
Tension du matriau (Nm)
1
0 5 10 15 20 25
Temps (s)
Figure 10 Vitesse et tension du matriau
HHHH 1 HHH HHHHH]
0 5 10 15 20 25
Couple bobineuse (Nm)
200
.. .. .. .. 11]
0 5 10 15 20 25
Puissance bobineuse 011/)
2000
t 1 HHHHHHH HH IHHHH HHHHH]
0 5 10 15 20 25
Temps (s)
Figure 11 Vitesse de rotation, couple et puissance de la bobineuse
On remarque donc que la vitesse de dfilement du matriau augmente linairement
jusqu' sa valeur souhaite (5 mis). La tension du matriau est elle aussi correctement
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
25
rgule sa valeur (300 Nm). Une fois que ces valeurs sont atteintes, on peut observer
sur la figure 11 que le couple augmente linairement mesure que le matriau est
enroul. Par consquent, la vitesse angulaire de la bobineuse diminue elle aussi de faon
linaire. La puissance de la bobineuse est alors approximativement constante.
2.4.5 Comparaison des rsultats avec le modle original
Les rsultats obtenus prcdemment doivent tre compars avec ceux du modle original
contenu dans Matlab/Simulink. Une simulation avec le modle entirement Simulink en
utilisant le mme algorithme de calcul est ralise. Les rfrences sont galement les
mmes. Les figures 12 et 13 montrent l'cart relatif entre les deux modles par rapport
au modle Simulink. Autrement dit, le pourcentage de variation du modle
SimMechanics par rapport au modle original : ( ~ %) . La variable x tant la valeur
d'une variable du modle Simulink et dx la diffrence entre cette variable dans le
modle SimMechanics et le modle Simulink.
Les rsultats obtenus avec le modle SimMechanics sont extrmement proches de ceux
obtenus avec le modle Simulink. La diffrence tant de 1' ordre de 0,1 0,2%
comparativement au modle original. On parle de diffrence et non pas d'erreur, car les
modules Simulink et SimPowerSystems possdent chacun leur propre mthode de
rsolution du systme. Il est alors impossible de savoir qui est le plus fidle la ralit
avec de si petites diffrences.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
26
Diffrence de vitesse de dfilement du matriau (%)
Diffrence de tension du matriau (%)
qlqq q q qq qi qq qqqqq q lq qqq q q q 1 q q q q
-6 -0.25
-0.5 . . : :
0 5 10 15 20 25
Temps (s)
Figure 12 Diffrences vitesse et tension du matriau
Diffrence de vitesse de la bobineuse (%)
g .............. ................... ................... + .................... !: ...................
X .,._,____...--: "'-----:- .,-- . -= -
-0.25 ..................... ; ..................... ................... .
-0.5 . . .
0 5 10 15 20 25
L ............... l ...... de la bobi1neuse ........ : .................. J
4
-0.5 .__ ____ __,_ _____ _.__ ____ _____ _._ ____ ___J
0 5 10 15 20 25
Diffrence de puissance de la bobineuse (%)
;
-0.25rrr ............. -1- ................... -t- ................... I ............. L
<:l -0.5 . . . .
0 5 10 15 20 25
Temps (s)
Figure 13 Diffrences vitesse de rotation, couple et puissance de la bobineuse
Du point de vue des rsultats de simulation, on peut donc dire que ces derniers sont
quivalents quelque soit le modle simul. Par contre en ce qui concerne les temps de
simulation, cela n'est pas le cas (tableau 1).
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
27
Tableau I
Temps de simulation
Cycle de simulation
Temps rel de
simulation obtenu
Modle Simulink 25 s 42 s
Modle
25 s 414 s
SimMechanics
On remarque que le temps rel de simulation du modle SimMechanics est dix fois celui
du modle original. Ceci provient de la mthode d'analyse du module SimMechanics
lui-mme. Cet outil doit tenir compte des diffrents organes mcaniques en rotation et en
translation sur les trois axes et qui compliquent les calculs et allongent les temps de
simulation.
2.5 Conclusion
Ce chapitre avait pour objectif tout d'abord de montrer les enjeux et les difficults de la
simulation multi-domaines ainsi que de prsenter les modules de Physical Modeling de
Matlab/Simulink utiliss dans ce projet pour la modlisation et la simulation de systmes
lectromcaniques.
Un premier exemple trait est celui de la bobineuse. Dans ce modle, la partie
mcanique est modlise par des blocs SimMechanics. Les simulations ont montr que
les rsultats du modle SimMechanics taient quivalents par rapport ceux du modle
original (entirement Simulink). Cependant, les temps de simulation sont beaucoup plus
longs (multiplis par un facteur 10).
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
28
Ce premier exemple a permis de montrer un des dsavantages d'avoir des modules
spcialiss dans chaque domaine par rapport un seul module pluridisciplinaire. En
effet, l'utilisation de deux mthodes d'analyse et de calculs entrane l'allongement des
temps de simulation (modle SimMechanics 10 fois plus lent que le modle Simulink)
alors que la prcision des rsultats obtenus est la mme.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
CHAPITRE3
LE SYSTME DE PROPULSION HYBRIDE LECTRIQUE
3.1 Introduction
Cette partie propose une dfinition d'un vhicule hybride lectrique et prsente les
diffrentes architectures hybrides possibles. Ensuite, la partie transmission hybride et le
systme hybride de la Toyota Prius ainsi que son principe de fonctionnement sont
expliqus. Les principales caractristiques du systme lectrique, du systme mcanique
et du systme de gestion de 1' nergie sont enfin, prsentes.
3.2 Dfinition et prsentation de la voiture hybride
De faon gnrale, on appelle vhicule hybride tout vhicule qui, en plus de sa source
d'nergie primaire (nergie chimique du carburant en gnral), possde un stockage dit
rversible d'nergie sous une seconde forme. Cette nergie pouvant tre 1' nergie
lectrique d'une batterie, d'un super condensateur, l'nergie hydraulique d'une rserve
de pression, ou bien l'nergie cintique d'un volant d'inertie. Cette nergie est dite
rversible, car elle peut tre dlivre aux roues ou bien stocke par l'intermdiaire d'un
dispositif de conversion d'nergie. En pratique, on observe que la quasi-totalit des
solutions retenues sont bases sur une seconde source d'origine lectrique.
Un vhicule hybride lectrique associe ainsi deux sources d'nergie diffrentes. Il
possde une chane de traction base sur un moteur thermique (essence, diesel, gaz, etc.)
et une chane de traction lectrique (batterie ou super condensateur, moteur lectrique).
Le vhicule hybride lectrique est la solution intermdiaire entre les vhicules
conventionnels (thermiques) et les vhicules lectriques.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
30
Les vhicules hybrides lectriques ont t crs pour une raison majeure: afin de
diminuer la consommation en carburant d'un vhicule conventionnel et ainsi amliorer
le rendement nergtique de ce vhicule. En effet, dans un vhicule conventionnel, ce
rendement est de 1' ordre de seulement 10 ou 15% cause de 1 'utilisation courante du
moteur de faibles vitesses [8]. La consquence premire tant la diminution des
polluants mis par ces vhicules, contribuant ainsi la rduction des missions de gaz
effet de serre et plus prcisment les missions de dioxyde de carbone. Le vhicule
lectrique permet de rsoudre ce problme idalement mais la technologie actuelle sur
les batteries et le systme d'lectronique de puissance ne permet pas de disposer des
caractristiques dynamiques ainsi que d'une autonomie suffisante, qui soient attrayantes
pour le consommateur. C'est pourquoi le secteur automobile favorise le dveloppement
de vhicules hybrides permettant de regrouper les avantages du vhicule conventionnel
(caractristiques dynamiques trs bonnes des vitesses leves) et du vhicule
lectrique (couple important disponible au dmarrage, pollution nulle). La rduction de
la consommation globale du vhicule s'effectue:
lors des phases d'arrt du vhicule: le moteur combustion peut tre coup;
lors des phases de dclration ou de freinage, o 1' nergie cintique peut
tre partiellement rcupre dans les batteries par le moteur lectrique au lieu
d'tre perdue dans les freins (sous forme calorifique);
par une utilisation du moteur combustion qui peut tre choisie de faon ce
qu'il soit utilis dans sa plage de haut rendement, quitte stocker la part
d'nergie non utilise pour la traction. De plus lors des fortes acclrations, il
est plus intressant d'utiliser le moteur lectrique aliment par l'nergie
stocke dans la batterie que de faire fonctionner le moteur combustion sa
limite, ce qui dgrade le rendement nergtique du vhicule.
Ainsi, dans l'optique d'utiliser le moteur combustion dans sa plage de haut rendement
pour rduire sa consommation, le vhicule hybride n'est pas simplement la juxtaposition
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
31
de deux chanes de traction qui travaillent en alternance. En effet, ces deux chanes
travaillent souvent (selon l'architecture utilise) en mme temps de faon utiliser
1' nergie disponible de la meilleure manire possible tout en gardant de bonnes
prestations de conduite (acclration, confort de conduite, vitesse de pointe). La gestion
de 1' nergie provenant des deux sources peut par consquent s'avrer extrmement
complexe.
Points d'opration d'une
transmission conventionnelle
(moteur thermique)
...
lQO
!
i
50
50 0 ..................
ili>M<I(I1"fl)
Couple maximal
$0
40
3<)
!
!
:.><>
Points d'opration du moteur
thermique dans une
transmission hybride
,:16.1
-
Figure 14 Points d'opration du moteur thermique dans le mode hybride
5
.
Le graphique ci-dessus montre les points d'oprations du moteur thermique dans le cas
d'une propulsion conventionnelle et dans le cas d'une propulsion hybride lectrique. On
remarque que le moteur combustion d'un vhicule hybride lectrique tourne des
5
Ce graphique a t tir et adapt de l'article d'Ali Emadi, Kaushik Rajashekara, Sheldon S. Williamson
et Sedjan M. Lukic [8]
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
32
vitesses plus leves et qu'il dlivre un couple mcanique en sortie plus lev. Cette
courbe dmontre qu'en utilisant un systme de gestion de l'nergie adapt, il est possible
de forcer le moteur thermique (en lui imposant une vitesse) fonctionner dans une zone
de haut rendement ou le couple de sortie est plus important et par consquent
d'augmenter le rendement nergtique du vhicule.
3.3 Les diffrentes architectures hybrides
Durant les dernires annes, plusieurs vhicules hybrides lectriques ont t proposs
sur le march automobile. La diversit des ralisations montre que le choix d'une
architecture et les choix techniques qui en dcoulent ne sont pas simples. Trois
architectures hybrides sont possibles : l'architecture srie, l'architecture parallle et
l'architecture srie/parallle, appele aussi architecture combine.
3.3.1 L'architecture hybride srie
Dans l'architecture srie (figure 15), la propulsion est intgralement assure par le
moteur lectrique. Ce systme est appel srie car tous les lments de la chane de
traction sont disposs en srie, c'est--dire les uns la suite des autres. Le moteur
thermique (par le biais d'une gnratrice) et/ou la batterie fournissent la puissance
ncessaire au moteur lectrique dont le couple est transmis directement aux roues [ 17].
Dans cette architecture, le moteur lectrique doit tre relativement puissant car il assure
lui seul la totalit de la propulsion. Le rle de la gnratrice est d'une part de fournir la
puissance lectrique ncessaire au moteur, et d'autre par de recharger la batterie.
L'avantage de cette architecture est que le moteur thermique fonctionne un rendement
lev ce qui rduit le niveau de ses missions polluantes [8].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
33
__.,....Drive power __.,.... Electrc pmver
Battery
lnverter
Engtne
Mo tor
Drive wheels
Figure 15 L'architecture hybride srie [17]
L'inconvnient principal est la perte d'nergie dans la chane de transmission. En effet,
la puissance mcanique du moteur combustion doit tre transforme tout d'abord en
puissance lectrique pour alimenter le moteur, pour enfin tre convertie une nouvelle
fois en puissance mcanique aux roues. Ce systme est particulirement utilis pour des
vhicules vocation citadine.
3.3.2 L'architecture hybride parallle
Dans l'architecture parallle, le couple fourni aux roues provient du moteur thermique
ainsi que du moteur lectrique. La batterie ne peut cette fois, comparativement
l'architecture srie, tre recharge que par le moteur lectrique en fonctionnement
gnratrice. Les puissances provenant des deux sources circulent en parallle [17].
Cette architecture relativement simple (figure 16) ne peut pas la fois fournir le couple
ncessaire aux roues ainsi que le couple au moteur pour recharger la batterie. C'est
uniquement dans le mode freinage que 1' tat de charge de la batterie peut tre amlior.
Le moteur lectrique est utilis pour les faibles vitesses tandis que le moteur
combustion est utilis pour des vitesses plus leves o son rendement est meilleur. Le
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
34
ratio de la puissance fournie par les deux moteurs peut tre choisi de faon rduire la
consommation en utilisant chaque moteur dans sa plage de haut rendement. L'avantage
de cette architecture par rapport l'architecture hybride srie est que la perte d'nergie
dans la chane de transmission est moindre.
Engine
Figure 16
___,... Drive power __..,... Eledric power
Reduction
gear
Battery
lrwerter
Motor/generator
, Drive wheels
L'architecture hybride parallle [17]
3.3.3 L'architecture hybride srie/parallle
La troisime architecture (figure 17) est l'architecture hybride srie/parallle, qui est une
combinaison des deux architectures vues prcdemment, et qui permet de bnficier des
avantages de ces deux systmes. Deux moteurs lectriques et un moteur combustion
sont utiliss.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
Engine
Figure 17
___,.... Drive power __..,... Elactric po>.ver
Reduction
ge ar
Battery
fnverter
Motor
L'architecture hybride srie/parallle [17]
35
Le moteur combustion peut, suivant les modes de fonctionnement, fournir sa puissance
mcanique aux roues directement et/ou entraner une gnratrice pour fournir la
puissance lectrique ncessaire au second moteur lectrique. Ce dernier fournit son
tour un couple mcanique aux roues. La puissance requise par le moteur lectrique peut
provenir de la batterie et/ou de la gnratrice entrane par le moteur combustion. La
batterie quant elle peut tre recharge lors du freinage par le moteur lectrique en
fonctionnement gnrateur (entran par 1' nergie cintique du vhicule) ou bien par la
gnratrice en conduite normale. Comme on peut le voir, ce systme propose de
multiples solutions pour fournir la puissance aux roues ou recharger la batterie,
permettant ainsi 1 'utilisation des diffrents moteurs dans leurs zones de haut rendement
selon le mode de fonctionnement en cours.
3.3.4 Choix de l'architecture pour la Toyota Prius
Des trois architectures vues prcdemment, l'architecture hybride srie/parallle est
celle qui offre le plus de souplesse d'utilisation. Elle permet d'offrir toutes les
possibilits de gestion de la puissance entre le moteur lectrique et le moteur thermique.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
36
Ainsi en comparant les performances des trois architectures sur diffrents critres
(tableau Il), on s'aperoit que l'architecture srie/parallle est toujours plus performante
que les deux autres. C'est pourquoi nous avons choisi de modliser le systme de
propulsion de la Toyota Prius. Ce systme, nomm THS II pour Toyota Hybrid System
II, est sans conteste une rfrence dans le secteur de l'automobile hybride et lui a valu
d'tre lu voiture de l'anne 2005 en Europe. La suite de ce chapitre dcrit plus en
dtails la Prius et notamment le systme THS II simul par la suite.
Tableau II
Comparatif des diffrentes architectures hybrides
6
Performances
Rduction de la consommation
dynamiques
Arrt du Rendement
Rcupration Rendement Hautes
moteur du contrleur Acclration
d'nergie total vitesses
thermique d'nergie
Srie ** *** ** ** * *
Parallle ** ** * ** ** *
Srie/parallle *** *** *** *** ** **
* Fatble **Moyen ***Trs bon
3.4 La Toyota Prius et son systme THS II
En 1997, aprs une dcennie de recherche, en crant notamment le programme Hybrid
Synergy Drive dans le but d'allier performance et diminution de la pollution, Toyota
lance la premire Prius et son systme THS. Toyota prouva que cette solution pouvait
tre applique en srie. Depuis 1997, la Prius a t remanie deux reprises sans que le
6
Ce tableau a t tir et adapt du document de Toyota [17].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
37
choix de l'architecture srie/parallle ne soit remis en cause. La dernire verswn,
apparue en 2003, a cependant t profondment revue (systme THS II), offrant un gain
substantiel en terme de consommation. Le but du projet est non pas de simuler le
vhicule dans son ensemble mais le systme THS II correspondant la partie
transmission hybride de la voiture et son systme de gestion de 1 'nergie.
Figure 18 Toyota Prius
7
3.4.1 Les diffrents modes de fonctionnement
Selon les modes de fonctionnement, la gestion de 1 'nergie dans le systme de
transmission THS II est diffrente et ce dans le but d'obtenir le meilleur rendement
possible de chaque moteur tout en gardant un niveau de performance lev. Le systme
de transmission hybride (figure 19) est constitu du moteur lectrique, du moteur
combustion, du circuit d'alimentation haute tension, de la gnratrice, du rpartiteur de
puissance, du systme de transmission et de la batterie.
De plus, on peut ajouter le sous-systme de commande et de gestion de 1' nergie qui
permet de faire fonctionner et de grer les diffrents systmes noncs. Tous ces
7
Cette photo a t tire du document de Toyota [17].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
38
systmes sont dcrits dans la suite de ce chapitre et font l'objet d'une tude approfondie
sous 1 'environnement Matlab/Simulink dans la suite de ce rapport.
Moteur
thermique
Rpartiteur de
puissance
Transmission
/
Batterie
Circuit
d'alimentation
lectrique
Moteur
lectrique
Figure 19 Le systme de transmission de la Toyota Prius
8
3.4.2 Dmarrage, basses et moyennes vitesses
Le moteur essence n'est pas utilis au dmarrage jusqu'aux vitesses moyennes (figure
20). Ceci a pour but de ne pas utiliser le moteur combustion dans sa zone de faible
rendement. Le vhicule est donc m exclusivement par le moteur lectrique (A).
8
Ce graphique a t tir et adapt du document de Toyota [17].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
Moteur
thermique
Batterie
Circuit
d'alimentation
lectrique
Moteur
lectrique
Figure 20 Dmarrage, basses et moyennes vitesses
9
39
Dans ce mode, la puissance fournie en sortie du moteur lectrique est limite 20 kW.
Le moteur lectrique tant pourtant un moteur de 50 kW, cette puissance est limite par
la batterie qui ne peut dlivrer une puissance maximale de plus de 20 kW.
3.4.3 Conduite normale
En conduite normale, le dispositif de rpartition de puissance distribue la puissance
gnre par le moteur essence. Cette puissance peut suivre deux voies. Une partie
entrane directement les roues (C) et l'autre permet d'entraner une gnratrice qui
fournit son tour la puissance ncessaire au moteur lectrique (B) (figure 21). Ce
dernier fournissant le couple requis aux roues.
9
Ce graphique a t tir et adapt du document de Toyota [17].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
Moteur
thermique
Figure 21
Batterie
Circuit
d'alimentation
lectrique
Conduite normale
10
40
On pourrait penser que le fait de transformer la puissance mcanique en pmssance
lectrique pour enfin la reconvertir en puissance mcanique est une chose superflue. Le
moteur thermique ne possde pas un bon rendement des vitesses faibles comme il a t
expliqu prcdemment. Ainsi, malgr les pertes engendres lors des diffrentes
conversions de puissance, le rendement nergtique est plus favorable dans cette voie
que dans la voie o la puissance mcanique en sortie du moteur combustion est
transmise directement aux roues. La puissance fournie en sortie du moteur lectrique est
limite 30 kW. Cette puissance est limite par la gnratrice qui ne peut fournir une
puissance maximale de plus de 30 kW. Ce procd permet de faire travailler le moteur
combustion des vitesses plus leves et par consquent avec un meilleur rendement. La
rpartition des flux de puissance est contrle pour obtenir un rendement nergtique
optimal. Dans ce mode, pour des vitesses faibles, le moteur lectrique sera davantage
utilis. Par contre pour des vitesses plus leves, le rpartiteur de puissance aura
tendance favoriser la voie o la puissance mcanique du moteur combustion est
transmise directement aux roues.
1
Ce graphique a t tir et adapt du document de Toyota [17].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
41
3.4.4 Forte acclration
Dans le cas d'une forte acclration (figure 22), correspondant une demande de couple
importante, le moteur lectrique dlivre sa pleine puissance (50 kW). Ce dernier est
aliment en priorit par la batterie (A) qui fournit une puissance de 20 kW ainsi que par
la gnratrice (B) qui dlivre une puissance de 30 kW. Cette dernire est entrane par le
moteur combustion. La batterie fournit une puissance additionnelle au moteur
lectrique.
Moteur
thermique
Batterie
Circuit
d'alimentation
lectrique
Moteur
lectrique
Figure 22 Forte acclration
11
La gestion des flux d'nergie est faite de telle manire qu'elle permet de procurer une
acclration linaire et souple afin de garantir un confort de conduite satisfaisant.
3.4.5 Dclration, freinage et arrt
Lors d'une dclration ou d'un freinage (figure 23), le moteur lectrique fonctionne en
mode gnratrice (D), entran par l'nergie cintique de la voiture. Le moteur produit
une force qui tend s'opposer celle cre par le vhicule. La puissance ainsi dlivre
11
Ce graphique a t tir et adapt du document de Toyota [ 17].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
42
par 1' ensemble contrleur-convertisseur fonctionnant en redresseur est directement
stocke dans la batterie. Dans une voiture classique, 1' nergie cintique est perdue
chaque fois que les freins sont sollicits pour ralentir le vhicule. C'est une source
d'nergie importante pour la recharge de la batterie, tout particulirement en ville o les
arrts et les redmarrages sont frquents. Dans le cas o le vhicule est l'arrt, le
moteur combustion est automatiquement coup.
Figure 23
3.4.6 Recharge de la batterie
Batterie
Circuit
d'alimentation
lectrique
" Moteur
&lectrique
Dclration, freinage et arrt
12
L'tat de charge de la batterie est contrl de faon prserver un certain niveau de
charge. Si ce niveau diminue et atteint une certaine limite, en conduite normale, la
gnratrice entrane par le moteur combustion intervient pour recharger la batterie
(E). Ainsi, la Toyota Prius ne ncessite aucune recharge lectrique extrieure (figure 24).
12
Ce graphique a t tir et adapt du document de Toyota [17].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
Moteur
thermique
GnrRTrii''A
Batterie
Circuit
d'alimentation
lectrique
Moteur
lectrique
Figure 24 Recharge de la batterie
13
3.5 Caractristiques principales du systme THS II
43
Cette partie dcrit les diffrentes composantes le systme de transmission hybride THS
Il. Une description succincte de leurs rles et de leurs principes de fonctionnement est
faite et a pour objectif de prsenter ce qui est simul dans la suite de ce rapport.
Figure 25 Le systme THS II
13
Ce graphique a t tir et adapt du document de Toyota [17].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
44
3.5.1 Le circuit lectrique haute tension
La principale volution apporte la nouvelle Prius est son systme d'alimentation
haute tension. En effet, la tension aux bornes de la gnratrice et du moteur lectrique a
t porte 500 V au lieu de 274 V avec le systme prcdent THS (figure 27).
Figure 26 Circuit lectrique haute tension
14
La tension aux bornes de la batterie est de 202 V et est leve 500 V. Le but d'lever la
tension par l'intermdiaire d'un convertisseur CC/CC est de pouvoir alimenter un
moteur lectrique de puissance plus importante. Le moteur utilis est un moteur
synchrone aimants permanents dont la puissance dlivre est proportionnelle la
tension ses bornes.
14
Ce graphique a t tir et adapt du document de Toyota [17].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
45
THS
274 v
1 Moteur 1 1 Gnratrice 1 1 Batterie 1
THSII
500V
1
Circuit
202V
1 Moteur 1 1 Gnratrice 1 d'alimentation
haute tension
Ai"
1
1 Batterie 1
1
,
1
Figure 27 Schma de principe du circuit haute tension
15
Les pertes joules dissipes sont fonction de la rsistance interne et du courant la
traversant au carr.
(3.1)
pertes joules approximativement quivalentes (mme courant), la pmssance
disponible est presque double (de 33 kW pour THS 50 kW pour THS Il) et le couple
maximal disponible augment (de 350 Nm pour THS 400 Nm pour THS Il).
15
Ce graphique a t tir et adapt du document de Toyota [17].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
46
30kW
-
20kW
-----------------
Convertisseur de
1
1
la gnratrice
1
: Kl
20kW
chus
50 kW
Convertisseur
K2
du moteur
1
----------------
Convertisseur CC/CC
Figure 28 Les flux de puissance dans le circuit d'alimentation haute tension
16
Pour les flux de puissance (figure 28), la puissance dlivre au moteur provient de :
La batterie (20 kW). Le convertisseur CC/CC permet de redresser la tension
de 202 V 500 V. La puissance en entre et en sortie du convertisseur est de
20 kW. La tension du bus CC aux bornes du condensateur est rgule
500V.
La gnratrice entrane par le moteur combustion. La puissance fournie
par la gnratrice est de 30 kW. La tension aux bornes de la gnratrice est
fixe 500 V par le condensateur du bus CC. Un redresseur est utilis en
sortie de la gnratrice pour convertir la tension triphase alternative en
tension continue.
Un convertisseur est galement utilis pour convertir le courant continu en courant
alternatif triphas pour alimenter le moteur. La puissance maximale transitant dans ce
convertisseur est de 50 kW. Tous les convertisseurs utiliss sont bidirectionnels de faon
16
Ce graphique a t tir et adapt du document de Toyota [17].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
47
permettre au courant de circuler dans les deux sens selon le mode de fonctionnement
utilis (freinage ou traction).
Les descriptions des convertisseurs de puissances ainsi que le contrle de la tension aux
bornes du condensateur du bus CC sont effectues en dtails dans le chapitre suivant.
3.5.2 La transmission hybride et son rpartiteur de puissance
La transmission hybride de la Toyota Prius est constitue du moteur combustion, du
moteur lectrique, de la gnratrice, du rpartiteur de puissance et de la bote de vitesses.
Le rle du rpartiteur de puissance, comme il a t vu prcdemment, est de rpartir la
puissance mcanique du moteur combustion entre les roues et la gnratrice. Cette
division de la puissance dpend du mode de fonctionnement du vhicule. La puissance
dlivre par le moteur pouvant suivre une voie mcanique ou une voie lectrique.
Le rpartiteur de puissance utilise un train plantaire picyclodal (figure 29). Ce
dispositif permet aux trois moteurs d'additionner leurs couples sans imposer un rapport
fixe entre les rgimes. Le train plantaire picyclodal est compos d'un pignon
plantaire associ des pignons satellites (appels ainsi car les satellites tournent autour
du plantaire comme dans le systme solaire). Le train plantaire reoit, par la couronne
denture interne, la puissance du moteur lectrique et par le porte-satellites celle du
moteur combustion. Le pignon soleil tant solidaire de la gnratrice.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
Moteur
thermique
Pignon soleil
(gnratrice)
Porte-satellites
(moteur thermique)
Figure 29
Gnratrice
Couronne
(moteur lectrique et
arbre de transmission)
Train plantaire
Train plantaire picyclodal
17
48
Selon le mode de fonctionnement du vhicule, les diffrents lments du train plantaire
picyclodal tournent dans un sens ou l'autre une certaine vitesse (figure 30).
Vitesse de la
gnratrice
Pignon soleil
Figure 30
Vitesse du moteur Vitesse du moteur
thermique lectrique
1
i
Porte-satellites Couronne
Comportement du train plantaire
17
Ce graphique a t tir et adapt du document de Toyota [17].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
49
Cette figure prsente donc les diffrentes vitesses mises en jeu sur chacun des lments
tournant du train plantaire et ce pour chaque mode de fonctionnement du vhicule.
l'arrt (A), aucun des trois moteurs ne tourne. Au dmarrage ou basse vitesse (B), le
vhicule est m exclusivement par le moteur lectrique. Lorsque le mode hybride est
activ (MCI allum), la gnratrice dans le rle de l'alterno-dmarreur entrane le
pignon soleil et dmarre le moteur combustion (C). En conduite normale (D), le
moteur thermique est utilis. Le pignon soleil (gnratrice) ne tourne pas car la recharge
de la batterie n'est pas ncessaire. Enfin, dans le cas d'une forte acclration (E), le
moteur combustion fournit plus de puissance, le moteur lectrique (couronne)
fonctionne et est aliment par la gnratrice (pignon soleil) et par la batterie qui dlivre
une puissance additionnelle.
La mthode pour tracer ce graphe et les calculs lis au couple et la vitesse pour chaque
lment tournant sont expliqus au chapitre 6.
3.5.3 Le systme de gestion de l'nergie
Le systme de gestion de l'nergie a pour objectif de proposer un rendement nergtique
aussi lev que possible tout en gardant des performances dynamiques et un confort de
conduite levs. Il a galement pour objectif de grer l'nergie dans les circuits
auxiliaires du systme de transmission hybride tels que la climatisation par exemple.
Dans le cadre de ce projet, seulement quelques paramtres ont t pris en considration
dans le systme de contrle des flux d'nergie des trois moteurs. L'utilisation des
diffrents moteurs dans ce projet est fonction des paramtres suivants :
la position de la pdale d'acclration;
la vitesse actuelle du vhicule ;
la position de la pdale de frein.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
50
Sortie du moteur
Acclrateur
Moteur
combustion
thermique
~
,
-
.....
r ~
Vitesse du
Gnratrice
t Roues t
vhicule
Sortie du\.. ~
moteur
~ ~
Moteur
Freinage
lectrique ""'
....
Freinage rgnratif
Figure 31 Systme de gestion de l'nergie de la transmission hybride
Ces lments sont les principaux paramtres de commande pns en compte dans
l'tablissement de la stratgie de commande du systme de transmission (figure 31).
Cette stratgie de commande est explique dans le chapitre 6. En ralit, beaucoup
d'autres facteurs peuvent tre pris en compte tel que la position de la bote de vitesses,
l'tat de charge de la batterie. Cependant, prendre en compte ces paramtres,
compliquerait beaucoup la stratgie de commande. De plus, ils ne sont pas ncessaires
pour montrer le comportement du systme dans son ensemble.
3.6 Conclusion
Ce chapitre a permis de montrer l'intrt principal du vhicule hybride qui est la
rduction des missions polluantes ainsi que des diffrentes architectures utilises. Ceci
est obtenu en utilisant une seconde source d'nergie lectrique et en utilisant un systme
de gestion de l'nergie permettant d'exploiter chacun des moteurs dans sa plage de haut
rendement, ceci dans le but ultime d'augmenter le rendement nergtique du vhicule.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
51
Le systme de transmission hybride srie/parallle de la Toyota a t dcrit dans son
ensemble. Les principes de fonctionnement et les caractristiques principales de chacun
des sous-systmes ont t prsents. Ce systme peut se dcomposer en un sous-systme
lectrique comportant les moteurs et leurs entranements, la batterie et le convertisseur
CC/CC, un sous-systme mcanique incluant un moteur combustion, un train
plantaire et une chane de transmission du couple aux roues. Le dernier sous systme
est celui de la gestion de 1' nergie qui dtermine les consignes des diffrents moteurs. Le
chapitre suivant prsente le modle Matlab/Simulink ralis de 1 'architecture hybride
srie dans un premier temps et dcrit prcisment la modlisation de chaque sous-
systme. Le modle srie/parallle sera ensuite trait.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
CHAPITRE4
DESCRIPTION DU MODLE SRIE
4.1 Introduction
Ce chapitre a pour objectif de proposer une description dtaille des diffrents sous-
systmes modliss dans l'environnement Matlab/Simulink qui composent le modle de
la transmission hybride srie. Ce systme peut tre dcompos en trois sous-systmes :
le sous-systme lectrique qui regroupe le moteur lectrique, la gnratrice,
la batterie et le circuit d'alimentation haute tension;
le sous-systme mcanique qui inclus le moteur combustion, le systme de
transmission du couple transmis aux roues, ainsi que la modlisation du
vhicule lui-mme;
le sous-systme de commande des moteurs.
4.2 Le modle srie dans son ensemble et sa commande
Le modle srie dans son ensemble est prsent par la figure suivante. Il possde donc
un sous-systme lectrique, un sous-systme mcanique et un systme de commande.
On a vu dans le chapitre prcdent (figure 15) que dans l'architecture srie, le vhicule
est m uniquement par le couple fourni par le moteur lectrique. Ce moteur est aliment
par une gnratrice qui est alors entrane par un moteur combustion, et par une
batterie. Une commande pour chacun des trois moteurs donc tre dfinie. Le systme au
complet est le suivant :
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
Consigne
de vitesse
du vhicule
Consigne de
vitesse de la
gnratrice
Consigne
de couple
duMCI
Sous-systme
de commande
53
Nvhicule ..
Moteur
T,rans,.
Trans-
Batterie
lectrique
(20kW)
miSSIOn
(50kW)
Ngn.
Gnratrice
TMCJ
Moteur
NMCJ
(30kW) -
-----+ combustion
interne (MCI)
Figure 32 Schma d'ensemble du modle srie
La consigne de vitesse du vhicule est quivalente la consigne de vitesse du moteur
lectrique (en r/min) puisque l'arbre de transmission de ce dernier dlivre le couple
ncessaire aux roues via le systme de transmission. Le moteur combustion interne et
la gnratrice sont sur le mme arbre. Cet arbre tournant une vitesse constante qui
correspond la consigne de vitesse de la gnratrice (en r/min). Enfin la consigne de
couple du moteur combustion quivaut la position de la pdale d'acclrateur. Cette
dernire consigne est comprise entre 0 et 1. Ainsi la gnratrice et le MCI tournent une
mme vitesse et leurs couples varient en fonction de la position de la pdale
d'acclrateur. Ces diffrentes consignes sont dfinies au chapitre 5.
Ce systme ne fait pas apparatre de systme de gestion de 1' nergie de faon faire
fonctionner chacun des moteurs dans sa plage de haut rendement. Un tel systme est mis
en place et dcrit au chapitre 6.
La figure suivante rsume la circulation des diffrents flux de puissance entre les
diffrents systmes.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
54
Moteur Batterie
combustion
PMCI P,atterie
,
gnratrice
1 Gnratrice :
P;nmoteur
Moteur
lectrique
r = P,hicu/e
Systme de
Transmission
Figure 33 Flux de puissance dans le modle srie
Ainsi, on peut voir que la puissance en entre du moteur lectrique est gale la
puissance dlivre par la batterie plus la puissance fournie par la gnratrice. Des pertes
apparaissent dans le moteur lectrique et la gnratrice. On a donc :
P;nmoteur = P,hicule + ppertesmoteur
P;nmoteur = + P,atterie
PMCI = + ppertesgn
4.3 Le systme lectrique
(4.1)
(4.2)
(4.3)
Le systme lectrique est compos du moteur lectrique, de la gnratrice, du circuit
d'alimentation haute puissance et de la batterie. Le rle principal du systme lectrique
est de fournir une source d'nergie alternative celle fournie par le moteur combustion
pour entraner le vhicule. Cette source d'nergie peut tre utilise de diffrentes
manires selon le mode de fonctionnement du vhicule dsir. Le moteur lectrique doit
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
55
tre capable d'entraner le vhicule lui tout seul sous certaines conditions. Il apporte
galement un couple additionnel aux roues si le couple fourni par le moteur
combustion est insuffisant. Enfin, il permet d'effectuer un freinage rgnrateur en
transformant 1' nergie cintique du vhicule en nergie lectrique permettant ainsi de
recharger la batterie.
+ 1------1
Batterie
(202V)
- t-----1
Rfrence de vitesse
Vitesse mesure
Rfrence de vitesse
Convertisseur
CC/CC
Gnratrice et
son
entranement
Vitesse mesure
__ Bus CC
T (500V)
Moteur
lectrique et
son
entranement
Figure 34 Schma de principe du systme lectrique
4.3.1 Le moteur lectrique et son entranement
Le modle du moteur lectrique est bas sur le modle d'entranement lectrique d'une
machine synchrone aimants permanents (MSAP). Ce modle correspondant est nomm
AC6 dans la librairie Electric Drives de SimPowerSystems contenu dans
Matlab/Simulink. Le modle AC6 de l'entranement disponible a d tre modifi et
adapt pour pouvoir tre utilis. Le schma de principe de 1' entranement lectrique
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
56
modifi de la MSAP est montr la figure 35. Le modle utilis est un modle dit
valeurs moyennes. Une rgulation de vitesse y est faite. Le module SimPowerSystems
propose en effet deux modles pour l'entranement lectrique de la MSAP. Un modle
dtaill et un modle dit valeurs moyennes.
Rfrence
de vitesse
Bus CC
------.J Contrleur
+
Onduleur
vectorielle
Capteur de
position
Figure 35 Schma de principe de 1' entranement lectrique du moteur
Le modle dtaill est un modle utilisant des interrupteurs pour le rgulateur de courant
hystrsis dont les frquences de commutation sont autour de 10 kHz. Le pas de calcul
ncessaire pour obtenir une prcision satisfaisante est de 1 'ordre de la microseconde, ce
qui a pour but d'augmenter les calculs et ainsi d'allonger les temps de simulation. De
plus, ces commutations crent de faibles oscillations la frquence de 10 kHz sur les
courants du moteur et par consquent sur le couple lectromagntique produit par ce
dernier. Ces petites oscillations sont alors absorbes par la charge connecte au moteur.
Ceci est particulirement vrai dans le cas tudi o la charge est une voiture. C'est
pourquoi la reprsentation de ces phnomnes hautes frquences n'est pas pertinente.
L'utilisation d'un entranement lectrique dit valeurs moyennes permet alors
d'augmenter le pas de calcul d'un facteur de 30, ce qui acclrera les simulations en
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
57
remplaant les interrupteurs de puissance par des sources de tension et de courant
commandes. Le schma bloc Simulink de l'entranement lectrique est le suivant:
L Speed Controller1
N
VECT j
<Rotor apeed wm rad/a >
CQ
N" Qrl
f--+CO
Torque*
Speed ref (tr/min) Ctrl
-
sig'
<Rotor angle thetam rad >
l_abc + <Eiectromagnellc torque Te (Nm)>
0
A
Three-phase lnverter Mu x
1 Electromagnetlc Torque (N.m)
Ta
aoc
fvla
Tb
B m
fvlb
Tc
fvlc c
<D
8
- tv1easures PMSM1
Figure 36 Schma Simulink de l'entranement lectrique du moteur
4.3.1.1 La machine synchrone aimants permanents
La machine utilise dans 1' entranement est une machine synchrone triphase aimants
permanents distribution sinusodale de flux et tient son nom du fait que le rotor du
moteur tourne en synchronisme avec le champ tournant du stator. Cette vitesse est donc
lie la frquence de la source.
Le comportement lectrique et mcanique de la MSAP a t modlis dans
l'environnement Matlab/Simulink par une reprsentation d'tat du deuxime ordre en
utilisant la transformation de Park (figure 37). Cette reprsentation est ncessaire
puisque les entres et les sorties du modle de la machine synchrone sont exprimes
dans le rfrentiel a,b,c. La transformation de Park permet de convertir les tensions et les
courants pour chaque bobine dans le rfrentiel a,b,c en deux composantes dans le
rfrentiel d,q,O. De plus, cette reprsentation est ncessaire car les modles dynamiques
des machines courant alternatif sont relativement lourds et complexes. Afin de les
simplifier, on applique un changement de repre. La figure 37 montre la transformation
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
58
des trois bobines statoriques fixes dphases de 27rl3 en deux bobines fictives
quivalentes dphases de 7rl2. Le nouveau rfrentiel d,q,O, peut tre stationnaire ou
rotorique de tel sorte que les courants id,iq soient constants.
q
'
Sa
- - - - - - - - - - - - - - ~
Vb '
0
,: ----fYYT----
, 1 - t. Sa
ic , ~ t a
, Va
~ t '
Sc
Figure 37 Transformation de Park : Repre initial et repre de Park
Les quations lectriques de la machine synchrone sont les suivantes :
(4.4)
d . 1 U R . Ld . _ pwr
-l =- --l +-pOJl
dt q L q L q L r d L
q q q q
(4.5)
(4.6)
Les quations mcaniques de la machine synchrone sont les suivantes :
d 1
-w =-(T -Fw -T)
dt r J e r m
(4.7)
d{)r
-=OJ
dt r
(4.8)
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
59
Les paramtres de la machine doivent tre spcifis dans le modle d'entranement
lectrique de la MSAP (AC6) sous Matlab/Simulink. Le moteur lectrique de la Prius a
les caractristiques suivantes :
couple constant de 400 Nm entre 0 et 1200 r/min;
puissance constante de 50 kW entre 1200 et 1540 r/min;
tension du bus CC : 500 V.
Les paramtres de la machine correspondant ces caractristiques sont les suivants :
Tableau III
Paramtres du moteur lectrique
Distribution du flux Sinusodale
Entre, Sortie Vitesse (radis), Couple (Nm)
Rsistance statorique 0.0050
Inductance sur l'axe q 0.3mH
Inductance sur l'axe d 0.3mH
Flux induit des aimants 0.192 Wb
Inertie 0.25 kg.m
2
Coefficient de friction 0.005 Nm.s
Nombre de paires de ples 4
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
60
Les valeurs de ces paramtres ont t estimes partir des jeux de paramtres proposs
dans le bloc AC6 de la librairie des entranements lectriques dans SPS. Diffrentes
simulations ont t effectues afin d'ajuster ces valeurs pour rencontrer les spcifications
demands. Ces valeurs ne sont donc pas directement tires de la littrature ou des
donnes des constructeurs.
4.3.1.2 Onduleur triphas
La figure 35 montre que l'entranement lectrique du moteur est aliment par un bus CC
maintenu constant 500 V. Cette tension doit donc tre transforme en courant alternatif
afin d'alimenter le moteur. Un onduleur triphas permet de raliser cette opration. L
encore, l'utilisation d'un modle valeurs moyennes est prfr cause des
discontinuits causes par les interrupteurs contenus dans un modle dtaill. L'onduleur
utilis dans le modle valeurs moyennes intgre donc des sources de tension et de
courant commandes (figure 38). Du ct CC, une source de courant commande est
utilise. La valeur du courant est spcifie par l'quation ci-dessous.
(4.9)
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
(?.ortie + ppertes ) / ~ n t r e
Source de
courant
contrle
V
Dtection de la
entre ___.
saturation
Impulsion! x
~ n t r e
Impulsion2 x
~ n t r e
Sources de
courant
contrles
Sources de
tension contrles
j'+ i
' ..
Figure 38 Onduleur triphas
1
1
1
1
1
1
1
1
61
Du ct CA, il existe deux possibilits. L'onduleur peut fonctionner en mode satur ou
non. Dans le cas du fonctionnement normal, trois sources de courant correspondant aux
courants moyens appliqus au stator de la machine synchrone sont utilises. Une charge
rsistive est utilise pour chaque phase uniquement afin d'viter des oscillations
numriques lors de la simulation. La valeur de la rsistance doit alors tre au minimum
2.5% de la puissance nominale de la machine et dpend du pas de calcul utilis lors de la
simulation. Pour corriger 1' effet de la charge, des courants sont ajouts aux sources de
courant. Les courants appliqus au stator correspondent aux courants statoriques de la
commande. L'onduleur utilise uniquement les rfrences ia et ib. Le courant au stator
ic est obtenu d'aprs l'quation suivante :
( 4.1 0)
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
62
L' onduleur peut galement fonctionner en mode satur. Ce mode est utilis lorsque la
tension du bus CC n'est plus suffisante face la tension interne de la machine synchrone
et le courant demand ne peut tre fourni. Alors, deux sources de tension sont utilises.
4.3.1.3 Contrleur
Pour 1' entranement du moteur, une rgulation de vitesse est choisie. Le schma bloc du
rgulateur est dcrit la figure 39. Le rgulateur de vitesse compare en entre la vitesse
du moteur mesure une vitesse de rfrence. La commande de vitesse est base sur un
rgulateur de type PL La sortie du rgulateur est une rfrence de couple qui est ensuite
applique la commande vectorielle. Cette rfrence de couple est dtermine partir
du traitement proportionnel et intgral de 1' erreur entre la rfrence de vitesse et la
vitesse relle de la machine synchrone.
Les rampes de vitesse appliques la rfrence de vitesse permettent de limiter les
pentes d'un signal de type chelon, afin de rduire l'effort de commande lors d'un
changement de rfrence. Deux saturations sont prsentes dans la commande de vitesse.
L'intgrateur possde une premire saturation pour viter que sa valeur de sortie ne soit
trop leve lorsque 1' erreur ne peut tre corrige. La deuxime saturation applique la
sortie de la deuxime sommation permet d'viter une rfrence de couple trop leve.
.------
1
1
1
1
1
1
1
1
1
1 1
N :
1 1 , ______ ,
Rampe de vitesse
Filtre passe bas
du t' ordre
Figure 39
Gain
intgral
Gain
proportionnel
Intgrateur
limit
Rgulateur de vitesse
r
1----?-e
Limiteur de
couple
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
63
4.3.1.4 Commande vectorielle
Le schma bloc de la commande vectorielle est prsent la figure 40. La commande
vectorielle permet de calculer les courants de rfrence qui sont ensuite fournis
l'onduleur partir du couple de rfrence provenant du contrleur et de la position
angulaire du rotor de la machine synchrone (}r. Les courants iabc sont obtenus en
effectuant une transforme inverse de Park. Cette transforme convertit les deux
composantes de courant orthogonales id et iq* vers le rfrentiel abc. L'quation de la
transforme inverse de Park est la suivante :
,-----
1
~
1
1
1
1
1
( } r ~
,_----
[::}
cos( (}e) -sin( (}e) 1
cos( (}e-
2
;) -sin( Be-
2
;)
1
cos( Be+
2
;) -sin( Be+
2
;)
1
..
l
id= 0
1
ld
J
--1
1 ..
1
J Calcul de iq 1
lq
1
dq-abc
1
1 1
1
1
1
1
1
(}e 1
:er=> (}e: 1
~
- _1
Figure 40 Commande vectorielle
[:;:]
(4.11)
Pour effectuer cette transformation, la position angulaire du flux rotorique est
dtermine par l'quation 4.13 qui est obtenue par la relation entre la position angulaire
mcanique du rotor et le nombre de paires de ples de la machine. La rfrence pour la
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
64
composante directe des courants statoriques est gale a zro (id =0). Cette composante
est nulle afin d'obtenir un facteur de puissance unitaire (la puissance ractive cre et les
pertes associes sont donc nulles). De plus les inductances sur les axes q et d tant
gales ( Ld = Lq), la composante id n'affecte pas le calcul du couple lectromagntique
(quation 4.6). La composante iq est obtenue par l'quation 4.12.
. 2 1 T:.
l =---
q 3 p
(4.12)
e =pB
e r
(4.13)
4.3.2 La gnratrice et son entranement lectrique
Il s'agit d'une MSAP utilise en mode gnratrice principalement. Le MSAP est alors
entrane par le moteur combustion et fournit une puissance au moteur lectrique.
Cependant pendant un trs court instant (quelques diximes de seconde), lors du
dmarrage, la machine se comporte en fonctionnement moteur qui correspond au
comportement d'un alterno-dmarreur. Ces rsultats sont montrs dans le chapitre
suivant. Le fonctionnement de 1' entranement est donc similaire celui du moteur
lectrique. Une rgulation de vitesse y est galement effectue. Les modles de
l'onduleur, de la commande vectorielle et du contrleur sont parfaitement similaires
ceux de l'entranement lectrique du moteur.
4.3.2.1 Paramtres de la gnratrice
L'entranement lectrique de la gnratrice est le mme que celui utilis pour le moteur
lectrique (AC6). Les paramtres du moteur et de son entranement ont donc t
modifis pour une machine de 30 kW. Sa vitesse nominale est de 3000 r/min.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
65
Tableau IV
Paramtres de la gnratrice (modle srie)
Distribution du flux Sinusodale
Entre, Sortie Vitesse (radis), Couple (Nm)
Rsistance statorique 0.0050
Inductance sur l'axe q 0.3 mH
Inductance sur l'axe d 0.3 mH
Flux induit des aimants 0.192 Wb
Inertie 0.25 kg.m
2
Coefficient de friction 0.005 Nm.s
Nombre de paires de ples 4
De la mme manire que pour le moteur lectrique, les valeurs des paramtres de la
gnratrice ont t estimes en s'inspirant des jeux de paramtres proposs dans la
librairie des entranements lectriques SPS. Ces paramtres ne proviennent donc pas de
la littrature ou de donnes des constructeurs.
4.3.2.2 Rgulateur de vitesse
Une rgulation de vitesse est galement effectue. La consigne est la vitesse de
rfrence. Cette vitesse d'entre correspond la vitesse que l'on dsire imposer au
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
66
moteur combustion. Le fonctionnement de ce rgulateur est identique celui du
moteur lectrique (partie 4.3.1.3 et figure 39).
Speed Controller
El------+ N
Speed ref (rpm)
Engine speed (rad/s)
.orque* (Nm)
Ctrl
Figure 41 Dtermination de la rfrence de vitesse
4.3.3 Le circuit d'alimentation haute tension
Le circuit d'alimentation haute tension permet d'lever la tension de la batterie pour
alimenter la MSAP et son entranement lectrique 500 V. Comme il a t vu dans le
chapitre 3, le fait d'lever la tension permet d'utiliser un moteur de plus grande
puissance sans augmenter les pertes Joule dans le circuit lectrique.
Le circuit d'alimentation haute tension est compos d'un convertisseur CC/CC et d'un
rgulateur de type PI permettant de maintenir la tension du bus constante 500 V (figure
42). Le rgulateur calcule le rapport cyclique de chaque interrupteur de puissance.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
4.3.3.1
" + battery
DC bus
+ DC/DC converter "
" - battery
DC/DC converter "
DC/DC Converter
( "'
Cycle
Q)e---+
+ DC/DC converter
@e--
- DC/DC converter
DC/DC converter
l!l;;;;;;==:==:==:===:===:===:IDuty cycle
Bus DC control! er
UBus
DC bus
+ battery
battery
Ubus
Uref
Figure 42 Circuit Simulink d'alimentation haute puissance
Le convertisseur CC/CC
67
Le convertisseur statique CC/CC, ou hacheur, permet de fournir partir d'une source de
tension fixe une source de tension de valeur moyenne rglable. La tension d'entre du
convertisseur CC/CC est la tension de la batterie (202 V). La tension de sortie est une
tension rgule de 500 V. Le schma de principe de base du convertisseur est reprsent
la figure 43.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
Figure 43
KI
L
K2
.- ----- - - -
1
1
1
1
1
1
1
1
1
1
- --
.---
1
1
1
1
1
1
1
1
1
1
---
Schma de principe d'un convertisseur CC/CC
68
Le convertisseur CC/CC est un convertisseur bidirectionnel. En effet, le courant
traversant ce systme peut circuler dans les deux sens selon le mode de fonctionnement
du vhicule. Dans le cas o la batterie fournit de 1' nergie, le courant circule de la
batterie vers le moteur lectrique. Dans ce cas la tension est leve de 202V 500V. Le
courant circule en sens inverse si le moteur fournit de l'nergie la batterie, telle cas du
freinage rgnratif. La tension est alors abaisse de 500V 202V.
Le pnnc1pe de fonctionnement est le suivant. Si l'interrupteur KI est ferm et
l'interrupteur K2 est ouvert, la tension de sortie est gale la tension d'entre moins la
tension aux bornes de l'inductance ( VL ). Le condensateur cbus reoit de
l'nergie de la part de la batterie et de l'inductance L. Le courant circule donc dans
l'tage suprieur du montage. Le circuit quivalent est une source de courant dpendant
du rapport cyclique de l'interrupteur KI. Si l'interrupteur K2 est ferm et KI est ouvert,
le condensateur Cbus est isol de la source. Le courant circule donc dans 1 'tage du bas.
La batterie fournit de l'nergie l'inductance L. Le condensateur Cbus se dcharge par
l'intermdiaire de la charge laquelle il est connect. Le condensateur Cbus est un
condensateur de filtrage qui a une valeur suffisamment leve pour que 1' on puisse
considrer que la tension de sortie disponible soit constante en rgime permanent. Cette
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
69
valeur a t spcifie Chus= 35f.1F et trouve par la mthode essai erreur. Le circuit
quivalent est une source de tension dpendant du rapport cyclique de K2.
Afin de simplifier le modle en rduisant les discontinuits traiter dans les signaux, les
interrupteurs Kl et K2 ont t remplacs par un modle quivalent utilisant une source
de tension commande pour reprsenter l'interrupteur K2 et une source de courant
commande pour l'interrupteur Kl. Le schma quivalent est reprsent par la figure 44.
v;,atterie
v;,us
~ - - - - - - - - - - - - - - - -
K2 K1
Figure 44 Schma quivalent des interrupteurs K 1 et K2
Ainsi la source de tension est commande par l'quation (4.14) et la source de courant
est commande par 1' quation ( 4.15).
v;,atterie = a 2 v;,us
(4.14)
( 4.15)
Les rapports entre la tension de la batterie, la tension du bus CC et les rapports cycliques
des interrupteurs K1 et K2 sont donns par les quations ( 4.16) et ( 4.17).
v;,us 1
--=--
v. 1-a
batterie 1
(4.16)
(4.17)
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
70
4.3.3.2 Le rgulateur de tension du bus CC
Le rgulateur de tension du bus CC permet de maintenir la tension du bus CC constante
indpendamment de la charge connecte en sortie du rgulateur et quelque soit le sens
du courant le traversant. L'objectif du rgulateur est de fournir les rapports cycliques de
la source de courant et de la source de tension modlisant les interrupteurs KI et K2. La
commande des rapports cycliques a, et a
2
est base sur un rgulateur de type PL Les
rapports cycliques sont ensuite dtermins (figure 45).
La rfrence Ec est dtermine par un traitement proportionnel et intgral de l'erreur
entre la rfrence de tension du bus et la tension relle du bus mesure aux bornes du
condensateur Chus Le systme de rgulation du bus CC comprend deux saturations.
L'intgrateur possde une premire saturation pour viter que sa valeur de sortie ne soit
trop leve lorsque 1' erreur mesure ne peut pas tre corrige. La deuxime saturation
permet de limiter la valeur de la consigne entre 1 et -1.
Tension
du bus
Tension
rfrence
Filtre passe bas
du 1er ordre
) - - - - - - 1 ~
Gain
intgral
Gain
proportionnel
Intgrateur
limit
Limiteur
Figure 45 Rgulateur du bus CC
Ec
Calcul de t-----..
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
71
De cette consigne sont donc dtermins les rapports cycliques de a
1
et a
2
Le rapport
cyclique a
1
est dtermin par 1' quation ( 4.18) et a
2
par 1 'quation ( 4.19).
1
a
1
=2(Ec+l)
(4.18)
a
2
=(1-a
1
) (4.19)
Les valeurs de a
1
et a
2
ainsi obtenues permettent de commander la source de tension et
la source de courant modlisant les interrupteurs KI et K2. La figure 46 montre la
tension du bus CC, sa rfrence et les valeurs des rapports cycliques a
1
et a
2
Tension mesure du bus DC M Tension de rf. = 500V
500
480
................... .................... T ................... 1 .................... j ...........
0 0 0 0 0 0 0 0 0 ; 0 : 0 :
. . . . 460
0 2 4 6 8 10
Rapports cycliques alpha1 et alpha2
-;: :\ . : .
................... : ..... ....... : ...................... : .\ ............... : ................... .
: : : alpha2 :
0 1
0 2 4 6 8 10
Temps (s)
Figure 46 Tension du bus CC et valeurs des rapports cycliques a
1
et a
2
La figure montre la rgulation de tension effectue pour le bus CC et les valeurs des
rapports cycliques a
1
et a
2
On peut observer que la tension du bus CC se stabilise
rapidement en 0.8 s. La tension est alors constante et gale la tension de rfrence de
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
72
500 V. La valeur de a
1
se stabilise 0.6 et la valeur de a
2
se stabilise 0.4. Les
oscillations en dbut de simulation sont dues la forte puissance transitant dans le
convertisseur (de l'ordre de 50-60 kW) rendant la tension du bus difficile rguler sur
cette intervalle. Ainsi les quations ( 4.18) et ( 4.19) sont valides. t = 8 secondes, une
lgre perturbation apparat. Ceci est d au fait que le courant traversant le convertisseur
CC/CC a chang de sens (passage du mode traction de la voiture au mode freinage)
provoquant de faibles oscillations. Ainsi les tests montrent la robustesse du rgulateur
indpendamment du sens du courant le traversant.
4.3.3.3 Le modle de batterie
Le modle de batterie utilis est un modle idal. En effet il s'agit simplement d'une
source de tension idale de 202 V en srie avec une rsistance de 0.010. La puissance
maximale que peut fournir ou emmagasiner la batterie est donc infinie. En ralit cette
puissance devrait tre de 20 kW. La figure 47 reprsente la batterie lectrique et son
modle idal sous SPS.
Figure 47
0-------,l
+bat. ~
R1
I
.:.L
TDC
0----'J
-!>at.
La batterie lectrique et son modle idal sous SPS
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
73
4.4 Le systme mcanique
Le systme mcanique est compos du moteur combustion interne ou MCI, de la bote
de vitesses, d'un diffrentiel, de la modlisation de la dynamique longitudinale du
vhicule ainsi que de la modlisation du contact des roues avec le sol. Le rle du
systme mcanique est de produire un couple par l'intermdiaire du moteur
combustion pour entraner la gnratrice, puis de transmettre le couple de sortie du
moteur lectrique aux roues avant. Les diffrents lments sont prsents la figure 48.
Tous ces lments ont fait l'objet d'une modlisation avec le module SimDriveline. Ce
module proposant dj de nombreux blocs pour chacun des lments, 1' tude en fut
grandement facilite.
Figure 48 Le systme mcanique
Le systme de transmission du couple aux roues ne tient pas compte des pertes par
frottement contenues dans la bote de vitesses ou dans le diffrentiel. L'utilisation d'un
modle de bote de vitesses tenant compte de ces pertes suivant diffrents paramtres est
possible sous SimDriveline. D'autres blocs permettant de modliser des lments
dynamiques peuvent galement tre utiliss. Les seules pertes du systme de
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
74
transmission sont les pertes arodynamiques associes au modle de la dynamique
longitudinale du vhicule.
4.4.1 Le moteur combustion interne
Le moteur combustion interne ou MCI, dans l'architecture hybride srie, permet
d'entraner une gnratrice. Cette dernire produit la puissance lectrique alimentant le
moteur. Le bloc SimDriveline du MCI contient une seule entre qui est la consigne de
couple du moteur et qui correspond la position de la pdale d'acclrateur du vhicule.
En sortie, un vecteur contenant le couple et la vitesse du moteur est disponible. Ce bloc
est une modlisation trs simple n'incluant pas la dynamique de la combustion et ne
faisant pas apparatre de frottement ainsi que les pertes associes. Les paramtres
spcifis du moteur sont ceux correspondants au moteur de la Toyota Prius.
Tableau V
Paramtres du moteur combustion interne
Puissance maximale 57000W
Vitesse la puissance max. 5000 r/min
Vitesse maximale 6000 r/min
La caractristique puissance-vitesse ( P = f ( w)) et la caractristique couple-vitesse
( T = f ( m)) sont reprsentes sur la figure suivante.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
75
T = f(w)
120
Q)
- 100
0
(.)
. .
...... ; ................. 1r
................. :. . . . . . . . . . . . . . . . . . ........ 0 ........................ ............... 0: .....
. . . .
: : : :
1000 2000 3000
P = f(w)
4000 5000 6000
0 0 0 0 0 0 ., .................. ................................... .
1000
Figure 49
: : :
r r t :
2000 3000
vitesse (tr/min)
4000 5000
Caractristiques P = f ( OJ) et T = f ( OJ) du MCI
6000
4.4.2 La bote de vitesses
En sortie de l'arbre du moteur lectrique, un couple est disponible (figure 48). Ce couple
est transmis aux roues par l'intermdiaire de plusieurs lments mcaniques. Le premier
est la bote de vitesses. Celle de la Toyota Prius transmission variable (CVT), dont le
rapport de transmission est impos par un systme hydraulique qui change le diamtre
des poulies. Cependant, d la complexit du systme, le systme modlis est celui
d'un rducteur de vitesse ayant un rapport de transmission fixe (figure 50).
OJmoteur
Tmoteur
Figure 50
Bote de
vitesses
Bote de vitesses
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
76
Ce rapport a t fix 5 de faon obtenir une vitesse en sortie et un couple permettant
l'tude des diffrents modes de fonctionnement. Les axes d'entre et de sortie tournent
dans la mme direction. Aucune perte par frottement n'est prise en compte. Les
quations des couples et des vitesses sont les suivantes :
OJmoteur = 5 {J)bote
(4.20)
T =
moteur S
( 4.21)
{J)moteur "Tmoteur = OJbote
(4.22)
La figure suivante montre sur un cycle de 10 s les vitesses et les couples en entre et en
sortie de la bote de vitesses qui confirment les quations ( 4.20) et ( 4.21 ).
Vitesses en entre et sortie de la balle (rad/s)
: yv-moteur :
Couples en entre et sortie de la balle (Nm)
l\ : : : :
/ \ _,/ Tb flle
0 h ...... ; .......... ::":f :
: : : '-- Tmoteur :
lf...' ........ 0
:\ :
---1
: : : : : i
0 1 2 3 4 5 6 7 8 9 10
Temps (s)
Figure 51 Couples et vitesses en entre et sortie de la bote
Sur tout le cycle de simulation les quations ( 4.20) et ( 4.21) sont vrifies. Le couple est
positif sur l'intervalle Os < t < 5s approximativement, ce qui correspond une
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
77
acclration du vhicule. Le couple est ensuite maintenu constant et pratiquement nul
( ~ o r e = 21 Nm environ) entre t = 5 set t = 8 s, correspondant une vitesse constante du
vhicule. Enfin, lors du freinage de ce dernier (t > 8 s), le couple est ngatif.
4.4.3 Le diffrentiel
Le second lment mcanique pour transmettre le couple aux roues est le diffrentiel.
Cet lment relie l'arbre de transmission aux roues, permettant chacune des roues de
tourner une vitesse diffrente l'une par rapport l'autre. En ligne droite, les roues
tournent la mme vitesse. Cependant dans un virage, afin d'viter qu'une roue glisse
sur le sol et les efforts de torsion sur les arbres, un dispositif diffrentiel est ncessaire.
Dans le cadre de ce rapport, on considrera que le vhicule roule toujours en ligne
droite. Cependant, ce dispositif est important afin de rpartir le couple quitablement et
ce pour une mme vitesse chacune des roues (figure 52).
Diffrentiel
~ o t e
Figure 52 Diffrentiel
Comme pour la bote de vitesses, aucune perte par frottement n'est prise en compte. Le
modle est suppos idal. Les quations du systme sont les suivantes :
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
J;,ote = +
78
(4.23)
(4.24)
(4.25)
La figure suivante montre, sur un cycle de 10 s, les vitesses et les couples en entre et en
sortie du diffrentiel qui confirment les quations (4.23) et (4.24). Les vitesses en entre
et en sortie sont exactement les mmes. Les couples en sortie sont identiques et sont
quivalents la moiti du couple d'entre.
Vitesses en entre et sortie du diffrentiel (rad/s)
Couples en entre et sortie du diffrentiel (Nm)
/" : : : 0
0 u u ' '( u u u u ;u u u u oo o o oo o o' o o oo o oo oo
: : Jrg et Trd: :
. : : : :
Figure 53
5
Temps (s)
Couples et vitesses en entre et sortie du diffrentiel
4.4.4 La dynamique longitudinale du vhicule
SimDriveline, par l'entremise d'un bloc spcialement ddi, permet de reprsenter la
dynamique longitudinale (horizontale) du vhicule. Cette dynamique est fonction de
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
79
plusieurs paramtres tels que la masse du vhicule, sa cinmatique et sa gomtrie. Les
paramtres spcifier sont ceux de la Toyota Prius (tableau VI).
De ces paramtres, le bloc permet de dterminer les forces longitudinales Fxf et Fxr
appliques aux points de contact des roues avant et arrire. La vitesse de dplacement V.
est galement dtermine, tout comme les forces verticales appliques au point de
contact avec le sol des roues avant ( Fzf) et 1' axe des roues arrire ( F., ). Ces diffrentes
valeurs dpendent galement de la pente de la route f3 comme le montre la figure 54.
Tableau VI
Paramtres du modle de la dynamique du vhicule
Masse du vhicule 1325 kg
Distance entre le centre de gravit
1.35 m
et l'axe des roues avant
Distance entre le centre de gravit
1.35 m
et l'axe des roues arrire
Centre de gravit (CG) 0.5 m
Surface frontale 2.57 m
2
Coefficient arodynamique 0.26
Vitesse initiale Omis
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
80
Figure 54 Dynamique du vhicule
18
4.4.5 Le contact des roues avant au sol
Le dernier lment est la modlisation des roues avant sur lesquelles le couple provenant
du diffrentiel est appliqu et leur contact avec le sol. Un phnomne de glissement
intervient entre le contact de la roue au sol. Un bloc SimDriveline permet de rendre
compte de ce phnomne.
Du modle de la dynamique longitudinale du vhicule, on connat la force verticale
applique au point de contact de la roue avec le sol et la vitesse du vhicule. Le bloc
SimDriveline permet alors de dterminer la vitesse angulaire de la roue et sa force
longitudinale.
Diffrents paramtres tels que le rayon de la roue, le facteur de glissement, la charge
verticale value et sa charge horizontale et la longueur de relaxation du pneu doivent
tre spcifis (tableau VII).
18
Ce graphique a t tir et adapt de la documentation de SimDriveline [15].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
81
Tableau VII
Paramtres de la dynamique de la roue
Rayon de la roue 0.3 m
Charge verticale value 3000N
Charge horizontale maximale la
3500N
charge verticale value
Facteur de glissement 10%
Longueur de relaxation la charge
0.2m
verticale value
Les forces latrales exerces sur le pneumatique ainsi que celles exerces dans les
virages ne sont pas prises en compte. vitesse constante, le pneu agit comme un
amortisseur alors qu'en freinage, il agit la manire d'un ressort circulaire dformable.
OJ
Figure 55 Modle de la roue
19
19
Ce graphique a t tir et adapt de la documentation de SimDriveline [15].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
82
4.5 Conclusion
Ce chapitre a dcrit le modle srie dans son ensemble. Ce systme est compos d'une
partie commande simple ralise par des lments Simulink, d'une partie mcanique
incorporant des lments SimDriveline et enfin d'une partie lectrique ralise
principalement par des lments SimPowerSystems.
La partie commande fournit le profil de vitesse du vhicule qui est galement la
consigne de vitesse du moteur lectrique ainsi que la consigne de vitesse de la
gnratrice. Elle fournit enfin la consigne de couple du moteur combustion (position
de la pdale d'acclrateur).
Le sous-systme lectrique, compos du moteur lectrique, de la gnratrice, du
convertisseur CC/CC et de la batterie, permet de dlivrer une puissance suffisante afin
de respecter la consigne de vitesse du vhicule. Cette puissance provient du moteur
lectrique aliment par la batterie et/ou de la gnratrice par l'intermdiaire du MCI. Les
interrupteurs de puissance utiliss dans le systme lectrique ont t remplacs par des
sources de tension ou de courant commandes, permettant d'utiliser un pas de calcul
plus lev ( T, = 60 ps) .
Enfin, la partie mcanique regroupant le moteur combustion et le systme de
transmission permet de fournir un couple mcanique la gnratrice tournant une
vitesse constante, et permet de transmettre le couple en sortie du moteur lectrique aux
roues.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
CHAPITRES
RSULTATS DE SIMULATION DU MODLE SRIE
5.1 Introduction
Ce chapitre a pour objectif de montrer les rsultats obtenus avec le modle srie dcrit
dans le chapitre prcdent. Le modle est test sur un cycle de 10 secondes pendant
lequel tous les modes de fonctionnement sont couverts, savoir le dmarrage, la
conduite normale, le cas d'une forte acclration, le freinage, la recharge de la batterie.
Les rsultats montrs pour chacun de ces modes mettent en vidence les transferts de
puissance entre les diffrents sous-systmes et particulirement entre la batterie, la
gnratrice et le moteur lectrique.
5.2 Dfinition des rfrences des moteurs
Dans le chapitre prcdent, il a t vu que la partie commande doit fournir les consignes
de vitesse du moteur lectrique et de la gnratrice ainsi que la commande de couple du
moteur combustion.
La consigne de couple du MCI est dfinie comme une constante gale 0.7 en mode
traction, ce qui peut se traduire par le fait que la pdale d'acclrateur est enfonce
70% de sa valeur maximale. Elle est ensuite gale 0 pendant le freinage du vhicule
(5s < t < 8s) ce qui cette fois se traduit par l'extinction du MCI. La consigne de vitesse
de la gnratrice est, elle aussi, dfinie constante, et gale 3000 r/min. La figure ci-
aprs reprsente le profil de vitesse qui sert de rfrence au moteur lectrique. Il s'agit
d'une acclration constante pendant 5 secondes de 0 2100 r/min puis d'une vitesse
constante gale 21 00 r/min pendant 3 secondes et enfin d'un freinage ou dclration
pendant 2 secondes. Ce profil permet ainsi de couvrir tous les modes de fonctionnement
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
84
du vhicule. La vitesse atteinte par le vhicule est de 1 'ordre de 45-50 km/h sur
l'intervalle 5s < t < 8s.
Rfrence de vitesse du moteur lectrique (tr/min)
2100
. .
................... : .................... :- ..... ''j",----_,_ _____ ..;.,.,,
. .
1000 ~ [ : ]
. .
2 4 6 8 10
Temps (s)
Figure 56 Rfrence de vitesse du moteur lectrique
La simulation a t effectue en utilisant un pas de calcul de 60 f.lS ( T. = 60 f.lS) .
5.3 Rsultats gnraux
Avant d'analyser les signaux obtenus, pour chacun des modes de fonctionnement, cette
partie prsente les rsultats gnraux du systme, savoir le profil de vitesse obtenu du
vhicule et du moteur lectrique ainsi que le bilan des principaux flux de puissance.
5.3.1 Bilan des vitesses
L'un des rsultats importants consiste en la vitesse linaire du vhicule. L'arbre du
moteur lectrique tant directement connect ou engren sur 1' arbre du systme de
transmission (connect la bote de vitesses), le profil de vitesse obtenu du vhicule est
li celui du moteur lectrique (figure 57). On peut constater que la vitesse du moteur
lectrique est parfaitement rgule puisque parfaitement superpose la rfrence. Le
vhicule atteint la vitesse maximale de 47 km/h environ t = 5s.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
85
Rfrence de vitesse et vitesse mesure du moteur lectrique (tr/min)
3000r----.----or----.----.-----.----.-----.----.-----.----.
. . . . .
. . . . .
2000
1000
___
0 2 3 4 5 6 7 8 9 10
Vitesse du vhicule (km/h)
60r----------.-----------.-----------.----------.-----------.
. .
. .
47 ................... : .................... :- ........
. .
. .
20 :: ..
2 4 6 8 10
Temps (s)
Figure 57 Profils de vitesse obtenus du moteur lectrique et du vhicule
5.3.2 Bilan des puissances
Pour chacun des modes de fonctionnement, le bilan des pmssances des diffrents
organes du systme doit tre respect. Ce bilan doit donc valider l'quation (4.2) du
chapitre prcdent durant toute la simulation. Cette quation stipule que la puissance en
entre du moteur lectrique est gale celle dlivre par la gnratrice plus celle fournie
la batterie.
La figure suivante montre ces diffrentes puissances. On peut se rendre compte dans la
dernire partie de la figure que, sur tout le cycle de simulation, la puissance du moteur
lectrique est l'addition des deux autres puissances. Les courbes se superposant
parfaitement, 1 'quation ( 4.2) est alors vrifie.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
86
Puissance en jeu dans la batterie 0/11)
0
-1
- ~ : 0 : 0 : ~ 0 0 ; 0 0 0 : 0 .: 0 0 :
. : . . . .
0 2 3 4 5 6 7 8 9 10
x 1 o
4
Puissance dlivre par la gnratrice 0/11)
5 r - - - ~ r . ~ - - - - ~ - - - - - . - - - - - , , - - - - - r - - - - - r . l - - - - - . - - - - ~ ~ - - - - - . , - - - ~
0
-1
~ . :
i
9
x 1 o
5
Puissance en entre du moteur lectrique 0/11). Pmoteur = Pbatterie + Pgnratrice
0
i[i;:;[i: ........ .
: . . .
. .
: r r r
: 0 : : 0 0 ~ 0 0 ~ : 0 : : :
0
2 3 4 5
Temps (s)
6 7 8
Figure 58 Bilan de puissance du systme lectrique
9
10
10
La figure 59 montre les puissances en entre et en sortie du moteur lectrique ainsi que
les pertes engendres dans le modle de ce dernier. Ces pertes sont dues aux frictions
des lments mcaniques tournants ainsi qu'aux rsistances internes incluses dans le
modle. Ces pertes sont plus importantes lors de l'acclration (0 s < t < 5 s) et lors du
freinage ( partir de t = 8 s) o le courant circulant dans le moteur est plus lev. Des
pertes pour les mmes motifs sont galement prsentes dans le modle de la gnratrice.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
87
x 1 o
4
Puissances en entre et en sortie du moteur lectrique 0/11)
----, . .----.
. .... .
.....
: : : : : : :
i i i i i i i i i
0 1 2 3 4 5 6 7 8 9 10
Pertes dans le moteur lectrique 0/11)
. . .
0 :::: ..... ........................... .
. . .
: : :
. . .
. . .
-1000 ......... ; .......... ; ........... : ........... : .......... : .......... : .......... ; ......... .
: : : :
: : : :
: : : :
0 2 3 4 5 6 7 8 9 10
Figure 59 Bilan de puissance du moteur lectrique
5.4 Analyse des diffrents modes de fonctionnement
Les rsultats gnraux ayant t prsents, le comportement des diffrents systmes pour
chacun des modes de fonctionnement du vhicule est tudi. L'analyse porte
principalement sur les coulements de puissance entre la batterie, le moteur lectrique et
la gnratrice qui sont les organes principaux.
5.4.1 Dmarrage, basses et moyennes vitesses
Le premier mode de fonctionnement rencontr est celui du mode dmarrage, basses et
moyennes vitesses entre t = 0 s et t = O. 65 s environ.
Durant cette priode, le vhicule est m uniquement par le couple li la puissance
dlivre par la batterie, la gnratrice adoptant un comportement moteur qui entrane le
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
88
moteur combustion. Ce comportement peut tre assimil celui de l'alterne-dmarreur
d'un vhicule conventionnel. Dans ce cas, un moteur lectrique entrane le moteur
combustion afin de le dmarrer (il y a compression alors) et peut aussi fournir de
l'nergie lectrique la batterie en mode gnratrice.
Sur la figure suivante, on remarque que la vitesse de rfrence de la gnratrice est trs
leve. Pour pouvoir suivre cette rfrence, le moteur lectrique doit dvelopper un
couple positif et constant gal 150 Nm. Ce couple est limit par la saturation du couple
de sortie du contrleur (effort de commande maximal). La vitesse de la gnratrice ne
peut pas, par consquent, suivre la vitesse de rfrence qui elle suit une rampe
d'acclration de 10000 r/min par seconde (chapitre 4.3.1.3). La gnratrice fonctionne
donc en rgime moteur et entrane le moteur combustion (et son inertie attache de 0.5
kg 1m
2
) qui est vu comme une charge.
Vitesse mesure et vitesse de rfrence de la gnratrice (tr/min)
4000.------.-------.-------.-------.------.-------.-------.
3000
vitesse :de . . .
Z. ...
:- : : Vitesse :
............. ................ "'"':,
: : : : mesuree :
: : : : :
2000
1000
0.4 0.5 0.6 0.7
Couple en sortie de la gnratrice (Nm)
200 .-------.-------r,. -------.-------.-------.-------.-------,
150 ........ _
100 ............. ............... : ............... ............... : ............... ............... : ............ -
:
0 ............. , ......................... , ... , .......... ;.,.,.,, .......... ,.,,,,, ... , , ..... -
i i i i i i
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
Temps (s)
Figure 60 Vitesse et couple en sortie de la gnratrice
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
89
t = 0.65 s, la vitesse de rfrence de la gnratrice est atteinte. L'effort de consigne (la
consigne de couple) diminue brusquement (figure 60). Ce couple fourni par la
gnratrice est en mme temps un couple de charge pour le MCI. C'est pourquoi ce
dernier adopte le comportement d'un moteur en mode compression (couple ngatif et
vitesse positive) et sa puissance mcanique est ngative. Lorsque l'effort de consigne de
la gnratrice est ngatif (couple ngatif), cette dernire est entrane par le MCI et peut
fournir une puissance lectrique au reste du systme.
La gnratrice fonctionne en mode moteur et est alimente par la batterie. Cette dernire
fournit galement la puissance ncessaire au moteur lectrique pour satisfaire la
consigne de vitesse applique ce dernier. Le bilan des puissances s'crit:
= F:nmoteur -
(5.1)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
: o
4
........ [ .... e de la. gnfnce ur) .....
1
.... f .... j
-5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
Figure 61
Puissance en entre du moteur fYV)
0.3 0.4
Temps (s)
0.5 0.6
Bilan de puissance au dmarrage, basses et moyennes vitesses
0.7
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
90
La puissance de la gnratrice est ngative, puisqu'elle fonctionne en mode moteur. La
figure ci-dessus montre ces puissances et permet de vrifier l'quation (5.1).
La puissance de la batterie oscille du fait du rgime transitoire lors de la rgulation de la
tension du bus CC en dbut de simulation.
5.4.2 Recharge de la batterie
Le second mode de fonctionnement rencontr lors de cette simulation est le mode de
recharge de la batterie. Dans ce cas, la gnratrice fournit intgralement la puissance
ncessaire au moteur lectrique mais galement une puissance additionnelle permettant
la recharge de la batterie.
Ce mode correspond la priode entre t = O. 7 s et t = 3.25 s. Sur cet intervalle, la
puissance de la gnratrice est positive et est gale la puissance en entre du moteur
lectrique moins la puissance dlivre la batterie.
pgnratrice = P;nmoteur - ~ a t t e r i e
(5.2)
La figure suivante confirme ce bilan de puissance. On observe que la puissance dlivre
la batterie est considre comme ngative puisque cette dernire reoit de l'nergie. La
vitesse de la gnratrice est gale et constante la vitesse de rfrence applique en
entre et son couple est galement constant. La puissance dlivre par la gnratrice est
par consquent constante ( Pgn = 31 kW environ). Enfin, la puissance dlivre la
batterie diminue avec le temps, puisque la puissance demande par le moteur lectrique
augmente afin de satisfaire le profil de vitesse du vhicule. Les oscillations au dbut de
l'intervalle sont dues au fait que la gnratrice fournit subitement de l'nergie,
provoquant ainsi ce rgime transitoire.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
91
x 1 o
4
Puissance dlivre par la batterie 0IV)
rHH rH HHHI =HIH.H
0.5 1.5 2 2.5 3 3.5
x 1 o
4
Puissance dlivre par la gnratrice 0IV)
3 6
3
1
H EH,.HHH HH HHrHHH HHHHH:H H HHHHH. HHH HH H :HH HHHHHH
0.5 1 1.5 2 2.5 3 3.5
x 1 o
4
Puissance en entre du moteur 0IV)
0.5 1.5 2 2.5 3 3.5
Temps (s)
Figure 62 Bilan de puissance lors de la recharge de la batterie
5.4.3 Forte acclration
Le troisime mode de fonctionnement rencontr est celui du cas d'une forte acclration
lorsque la puissance de la batterie est requise pour satisfaire le profil de vitesse du
vhicule. Dans ce mode, la puissance dlivre aux roues provient de la batterie et de la
gnratrice alimente par le moteur combustion.
Ce mode est rencontr sur la priode 3.25 s < t < 5 s. Sur cet intervalle, la puissance de
la gnratrice ne suffisant plus pour satisfaire le profil de vitesse du moteur lectrique,
une puissance additionnelle est fournie par la batterie au moteur lectrique. D'autre part,
la gnratrice tourne toujours sa vitesse de rfrence de 3000 r/min un couple
constant de 120 Nm. Ce couple est constant car li la consigne de couple du
MCI ( TMci =O. 7). La puissance en sortie est donc constante et gale approximativement
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
92
31 kW. Enfin, la puissance de la batterie est cette fois positive puisqu'elle dlivre de
1 'nergie au moteur lectrique. La figure suivante permet de visualiser ces diffrentes
pmssances.
Puissance fournie par la batterie 0/11)
::: j
0 ....... : ........... : ........... : ........... : ........... : ............ : ............ : ........... } . ......... .
3.2 3.4 3.6 3.8 4 4.2 4.4 4.6 4.8 5
:Jo'H H 1 H dlre parla rnralncFHHH! HHHHHI H HHHj
3.2 3.4 3.6 3.8 4 4.2 4.4 4.6 4.8 5
lo'HH f H H Hf H Prssance rntree moleurTHHHHIH H HH IHHHHHj
3.2 3.4 3.6 3.8 4 4.2 4.4 4.6 4.8 5
Temps (s)
Figure 63 Bilan de puissance lors d'une forte acclration
5.4.4 Conduite normale
Lors d'une conduite normale, le vhicule est m par le moteur lectrique aliment
exclusivement par la gnratrice, cette dernire tant entrane par le MCI. Ce quatrime
mode de fonctionnement est rencontr sur l'intervalle 5 s < t < 8 s (figure 64).
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
93
x 1 o
4
Puissance fournie la batterie 0/11)
= 1 1 1 ! q q J
5 5.5 6 6.5 7 7.5 8
1 o
4
Puissance dlivre par la gnratrice 0/11)
::rq qqqqq !qq qqqq q 1q q qqq qql q qqqq qqfqqq qq q iqqqqq qqq]
5 5.5 6 6.5 7 7.5 8
1 o
4
Puissance en entre du moteur 0/11)
q qq qq :q qmq qq,Oq.qqqqqq ':oooooooooooooooool q qq qqqq,_qqqq qq
o, ... :......
5 5.5 6 6.5 7 7.5 8
Temps (s)
Figure 64 Bilan de puissance dans le cas d'une conduite normale
Dans cet intervalle, la vitesse du moteur lectrique est maintenue constante et gale
2100 r/min. Par consquent la vitesse du vhicule est galement constante (gale 4 7
km/h). La puissance en entre du moteur lectrique est de seulement 900 W car aucune
perte dans le systme de transmission (bote de vitesses, diffrentiel) n'est prise en
compte dans le modle. Les seules pertes sont les pertes arodynamiques du vhicule,
contenues dans le modle de la dynamique longitudinale de ce dernier. La voiture est
donc entrane principalement par son inertie. La figure 64 montre que la puissance de la
gnratrice est en presque totalit transmise la batterie, ce qui permet de recharger
cette dernire.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
94
5.4.5 Freinage
En fin de simulation ( 8 s < t < 10 s ), le dernier mode de fonctionnement du vhicule
rencontr est celui du freinage. Dans ce cas, 1' nergie cintique du vhicule est retourne
la batterie par l'intermdiaire du moteur lectrique en fonctionnement gnratrice.
Sur la figure 65, on observe que la puissance de la gnratrice est nulle. La gnratrice
tourne vide sa vitesse de rfrence puisque le moteur combustion est teint
(consigne de couple nulle). Ainsi aucune puissance n'est gnre par la gnratrice. Le
moteur lectrique tourne une vitesse positive mais son couple est ngatif,
correspondant un couple de freinage (figure 66). Le moteur fonctionne en mode
gnratrice et la puissance ainsi gnre est accumule par la batterie. Le bilan des
puissances est le suivant :
P;nmoteur = ~ a t t e r i e
(5.3)
La puissance P;nmoteur correspond la puissance gnre par le moteur lectrique.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
95
1 o
4
Puissance fournie la batterie 0/V)
.: [51:1 HHIH HH HIHHH H IHH HH IHHHHHiHH HH fHH HH 1 H HH]
8 8.2 8.4 8.6 8.8 9 9.2 9.4 9.6 9.8 10
Puissance dlivre par la gnratrice 0/V)
10000 J H HHrH HH
1
H H HrH HH
1
HHH lHHHHrH HH
1
H HHH
1
H H HJ
__ ...... .... I I .... . -... : ....... .. ...... I ......
8 8.2 8.4 8.6 8.8 9 9.2 9.4 9.6 9.8 10
8 8.2 8.4 8.6 8.8 9 9.2 9.4 9.6 9.8 10
Temps (s)
Figure 65 Bilan de puissance lors du freinage
Vitesse mesure et vitesse de rfrence du moteur (tr/min)
2000
1500
0
.......... : ........... ...
8.2 8.4 8.6 8.8 9 9.2 9.4 9.6 9.8 10
Couple en sortie du moteur (Nm)
0.----.-----.-----.-----.-----.----.-----.-----.-----.----.
!
-230
i i
8 8.2 8.4 8.6 8.8 9 9.2 9.4 9.6 9.8 10
Temps (s)
Figure 66 Vitesse et couple du moteur lectrique
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
96
5.5 Temps de simulation
Les analyses des signaux ayant t effectues, on s'intresse maintenant aux temps de
simulation. La simulation d'un cycle de 10 s du modle srie a t effectue en 35
secondes. On peut donc dire que la simulation de ce systme multi-domaines complet en
utilisant un pas de calcul de 60 J.lS ( 1', = 60 f.lS) , est relativement bon. Ce rsultat est d
notamment la mthode d'analyse du module SimDriveline dont les lments ne
peuvent tourner qu'autour d'un seul axe, ce qui allge considrablement les calculs
comparativement au module SimMechanics utilis dans le modle de la bobineuse du
chapitre 2. Ces temps de simulation sont limits par le pas de calcul utilis et dfini par
la modlisation des entranements lectriques sous SimPowerSystems.
5.6 Conclusion
Dans ce chapitre, une simulation sur une priode de 10 secondes permettant de couvrir
les diffrents modes de fonctionnement a t effectue. Les rsultats ont montr que le
comportement du systme hybride srie tait respect et notamment que les coulements
de puissance entre chacun des diffrents sous-systmes taient conformes aux prvisions
selon le mode de fonctionnement parcouru.
Les temps de simulation, en utilisant un pas de calcul de 60 f.lS , se sont avrs
relativement bons compte tenu de la complexit du modle. SimDriveline tant un
module ddi et optimis pour les systmes d'entranement mcanique et de
transmission, il s'agit des lments du module SimPowerSystems qui allonge ces temps
de simulation par l'utilisation d'un pas de calcul de 60ps. La simulation du sous-
systme lectrique a pourtant t optimise afin d'augmenter ce pas de calcul au
maximum en utilisant des modles d'entranements lectriques ainsi qu'un convertisseur
CC/CC dits valeurs moyennes (interrupteurs remplacs par des sources de courant ou
de tension).
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
CHAPITRE6
DESCRIPTION DU MODLE SRIE/PARALLLE
6.1 Introduction
Le modle srie tudi, ce chapitre dcrit maintenant le modle srie/parallle. Cette
architecture conserve tous les lments du systme prcdent auquel sont ajouts deux
lments. Le premier est un train plantaire permettant de rpartir la puissance du
moteur combustion et le second est un dispositif de gestion de l'nergie permettant de
faire fonctionner chaque moteur dans sa plage de haut rendement. Ce dispositif de
gestion de l'nergie est la retranscription sous Matlab/Simulink de l'algorithme propos
dans l'article de B. Jeanneret, R. Trigui, F.Badin, et F.Harel [3].
Ce chapitre dcrit dans un premier temps le modle srie/parallle dans son ensemble et
particulirement les flux de puissance circulants entre les diffrents lments du modle.
Ce chapitre montre galement les modifications apportes au sous-systme lectrique, et
le train plantaire ajout au sous-systme mcanique. Enfin, une analyse dtaille du
systme de gestion de 1' nergie est effectue.
6.2 Le modle srie/parallle dans son ensemble
L'architecture srie/parallle base sur celle de la Toyota Prius a prcdemment t
dcrite dans la seconde partie du chapitre 2. Le couple transmis aux roues provient du
moteur lectrique et/ou du moteur combustion. Le moteur lectrique est aliment par
une batterie et/ou une gnratrice entrane par le moteur combustion. La commande
du systme dans son ensemble est reprsente par la figure ci-aprs.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
98
De la position de la pdale d'acclrateur et de la vitesse angulaire de la roue, le sous-
systme de gestion de 1' nergie dtermine une consigne de vitesse pour la gnratrice et
deux consignes de couple pour le moteur lectrique et le moteur combustion. Ce sous-
systme dtermine galement si le vhicule doit fonctionner en mode hybride (moteur
combustion allum) ou en mode lectrique seul (vhicule m exclusivement par le
moteur lectrique entran par la puissance de la batterie). Le train plantaire permet de
rpartir le couple de ce dernier la gnratrice via le pignon soleil et aux roues via la
couronne. Le moteur lectrique aliment par la batterie et/ou la gnratrice est reli la
couronne et transmet son couple aux roues.
lcouronne Acclrateur
l l
Tmoteur
Ngn
Sous-
systme
Tmoteur
Mode hybride 011
1-
Sous-systme
lectrique
de gestion de
T ~
l'nergie
TMCJ
TMCI Train 1---
MCI r--.
~ o u r o n n e
T,hicu/e
Transmis- plantaire
SIOn
Figure 67 Vue d'ensemble du modle srie parallle
D'un point de vue puissance (figure 68), la circulation des diffrents flux de puissance
repose sur les quations suivantes :
pporte-sat + P.oteil = ~ o u r o n n e
(6.1)
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
ftatterie + = pmoteur
+ pmoteur =
Moteur Batterie
thermique
pporte-sat
ftatteri e
pgnratrice
Train P.oleil
.1 Gnratrice 1
plantaire 1 1
Moteur
lectrique
pmoteur
Systme de
Transmission
Figure 68 Flux de puissance dans le modle srie/parallle
6.3 Le sous-systme lectrique
99
(6.2)
(6.3)
Le sous-systme lectrique de l'architecture hybride srie/parallle reprend les mmes
lments que celui de l'architecture hybride srie. Il est compos de deux moteurs
synchrones aimants permanents dont l'un fonctionne en mode gnratrice, d'une
batterie et d'un convertisseur bidirectionnel CC/CC.
Dans ce modle, seules les caractristiques de la gnratrice sont modifies. La
gnratrice du modle srie/parallle est une gnratrice de 30 kW dont la vitesse
nominale est cette fois gale 10000 r/min. Les caractristiques correspondant ce
moteur sont les suivantes :
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
100
Tableau VIII
Paramtres de la gnratrice (mode srie/parallle)
Distribution du flux Sinusodale
Entre, Sortie Vitesse (radis), Couple (Nm)
Rsistance statorique 0.050
Inductance sur l'axe q 635mH
Inductance sur l'axe d 635mH
Flux induit des aimants 0.192 Wb
Inertie 0.011 kg.m
2
Coefficient de friction 0.00047 Nm.s
Nombre de paires de ples 1
Ces paramtres ont t estims partir de ceux du bloc AC6 de la librairie des
entranements lectriques de SPS. Le nombre de paires de ples a notamment t
diminu afin d'obtenir une vitesse de rotation se rapprochant des spcifications
demandes.
Dans le modle srie, une rgulation de vitesse tait effectue pour les deux moteurs
lectriques. Dans le modle srie/parallle, seule la gnratrice est en rgulation de
vitesse. Le moteur lectrique est quant lui en rgulation de couple. La rfrence de
couple du moteur est calcule par le sous-systme de gestion de l'nergie.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
101
Sur la figure suivante, la consigne est le couple de rfrence dans le modle de
1' entranement lectrique. Ce couple est donc tout simplement le couple
lectromagntique de rfrence en sortie.
Figure 69
Torque Controller
>N
~ N *
Set Point
Torque* ___.c=)
m Tem ref
Ct ri
Rfrence de couple du moteur lectrique
6.4 Le sous-systme mcanique
Le sous-systme mcanique est identique celui du modle srie. Les caractristiques de
chaque sous-systme le composant sont les mmes. Cependant, dans l'architecture
hybride srie/parallle, un dispositif pour transmettre le couple aux roues et la
gnratrice est utilis. Ce dispositif est un train plantaire picyclodal dcrit
succinctement au chapitre 3 (figure 29).
6.4.1 Train plantaire picyclodal : dtermination des vitesses
Comme il a t vu dans le chapitre 3, le train plantaire est compos de quatre lments :
la couronne sur laquelle le moteur lectrique est fix;
le porte-satellites sur lequel le moteur combustion est connect;
le pignon soleil sur lequel la gnratrice est connecte;
les satellites qui sont des arbres intermdiaires supportant des roues dentes
et qui assurent le lien entre le pignon soleil et la couronne.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
102
La formule gnrale de Willis [22] donne la relation qui existe entre les trois vitesses
angulaires enjeu savoir:
- msoleil : la vitesse angulaire du pignon soleil (gnratrice);
- mcouronne : la vitesse angulaire de la couronne (moteur lectrique);
- mporte-sat : la vitesse angulaire du porte-satellites (moteur combustion).
mso/ea - m porte-sat = K
mcouronne - m porte-sa/
(6.4)
K est la raison du train plantaire qui est gale -2,6. Cette constante peut tre calcule
par la formule suivante :
K=
nombre de dents de la couronne
nombre de dents du pignon soleil
(6.5)
Le train plantaire tant compos de quatre lments tournant des vitesses diffrentes,
il est difficile de comprendre et de visualiser les diffrentes possibilits de
fonctionnement. Pour rsoudre ces problmes de comprhension, une mthode
graphique est utilise. Cette mthode est la mthode Ravigneaux explique dans le livre
de Georges Henriot [22]. Elle permet de visualiser les vitesses de chacun des engrenages
et ce pour diffrents modes de fonctionnement (figure 30).
Solei!Porte-sat Porte-satCouronne
Soleil Porte-sat Couronne
Figure 70 Cl de la mthode Ravigneaux
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
103
Cette figure montre la mthode Ravigneaux. Sur une droite sont ports les points
correspondant aux lments du train plantaire (soleil, porte-satellites et couronne). La
longueur SoleilPorte-sat correspond au nombre de dents du pignon soleil et la longueur
Porte-satCouronne correspond au nombre de dents de la couronne.
6.4.2 Train plantaire picyclodal : dtermination des couples
Les couples appliqus aux diffrents organes du train plantaire sont les suivants :
- T.oteil : couple sur le pignon soleil de vitesse angulaire msoteil ;
- r;,ouronne : couple sur la couronne de vitesse angulaire mcouronne;
- Tporte-sat : couple sur le porte-satellites de vitesse angulaire mporte-sat.
L'quation de 1' quilibre des forces appliques au train plantaire est la suivante :
T.oteil + J;,ouronne + Tporte-sat = 0
(6.6)
Le couple du pignon soleil et le couple de la couronne peuvent tre calculs par les
quations suivantes :
1
T.oteil = - K _
1
Tporte-sat
(6.7)
T =_!5__T
couronne K _
1
porte-sa/
(6.8)
Selon le thorme de la conservation de 1 'nergie, la somme des puissances motrices et
rsistantes est nulle, c'est dire :
T.oteu msoteu + l;,ouronne mcouronne + Tporte-sat mporte-sat = 0
(6.9)
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
104
Le modle du train plantaire dans SimDriveline ne faisant pas intervenir de pertes par
frottement, cette quation ainsi que la formule de Willis [22] permettent de dresser le
bilan des vitesses et des couples appliqus au train plantaire et ce pour chaque mode de
fonctionnement du vhicule.
La couronne du train plantaire est l'lment connect directement la bote de vitesses.
Sur cet lment se trouve le couple transmis par le moteur combustion. Le couple
dlivr la bote de vitesses ( T;,hicuie) est gal au couple sur la couronne ( I;,ouronne) plus
le couple du moteur lectrique Tmoteur
T;,hicule = J;,ouronne + Tmoteur
(6.10)
Ainsi, T;,ouronne est le couple du mode parallle, Tmoteur , le couple du mode srie et enfin
T;,hicuie, le couple du mode srie/parallle au complet.
6.5 Le sous-systme de gestion de l'nergie
Le sous-systme de gestion de l'nergie prsent ci-aprs correspond l'algorithme
prsent dans l'article de B. Jeanneret, R. Trigui, F.Badin, F.Harel [3] et fut retranscrit
sous l'environnement Matlab/Simulink.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
105
gn
Gnratrice
N
Ngn
Commande
J
de vitesse
Mode Commande
Puissance
~ e q 0/1
requise
hybride de couple
ON/OFF duMCI
lTmoteur
Moteur lee .
Tmoteur
Commande
de couple
Figure 71 Algorithme gnral
20
Le sous-systme de gestion de l'nergie a pour objectif de dterminer, selon la position
de la pdale d'acclrateur et la vitesse du vhicule, les commandes de vitesse ou de
couple des diffrents moteurs. Ceci vise augmenter le rendement nergtique du
vhicule. La dtection du mode hybride permet de faire fonctionner le moteur
combustion ou non, selon la puissance requise par le conducteur.
6.5.1 Dtermination de la puissance requise
La puissance requise par les roues est dduite de la vitesse du vhicule ainsi que la
position de la pdale d'acclrateur comme le montre la figure suivante. Cette puissance
est calcule de la manire suivante :
~ e q = T,.eq O)veh
(6.11)
La vitesse du vhicule est exprime en r/min, qui correspond la vitesse de rotation de
la couronne du train plantaire.
2
Ce graphique a t tir et adapt de l'article de B. Jeanneret, R. Trigui, F.Badin, F.Harel [3].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
sse du Vite
vh icule
400
0
sition de la pdale
T=f(N)
'L
'
_..
1200 1540 5000
Po
d'a cclrateur [0 -> 1]
~
v
x
Couple
4
x
requis
Figure 72 Dtermination de la puissance requise
21
106
Puis san ce
e requis
~
Le couple requis provient de la caractristique couple-vitesse T = f ( N) du moteur
lectrique. Connaissant la vitesse, le couple peut donc en tre dduit. Cette
caractristique est dfinie par :
un couple constant entre 0 et 1200 r/min;
une puissance constante de 50 kW entre 1200 et 1540 r/min;
une vitesse maximale de 5000 r/min.
Entre 1200 et 1540 r/min, la puissance du moteur est constante (50 kW). Ainsi la courbe
a pour caractristique T(m) =
50000
, qui a l'allure d'une exponentielle dcroissante.
OJ
Entre 1540 et 5000 r/min, la puissance dlivre par le moteur dcrot sensiblement
jusqu' 45 kW [17]. Il s'agit donc l encore de l'allure d'une exponentielle dcroissante,
lgrement plus marque, qui justifie l'allure de la caractristique T = f(N).
21
Ce graphique a t tir et adapt de l'article de B. Jeanneret, R. Trigui, F.Badin, F.Harel [3].
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
107
6.5.2 Dtermination du mode hybride
Au dmarrage, le vhicule est m exclusivement par le moteur lectrique aliment par la
batterie. Si la puissance requise est suprieure 15 kW, le moteur combustion est
allum et fournit une puissance additionnelle. Pour viter les oscillations au dmarrage,
le mode hybride ne peut tre activ qu'au bout de 0.5 s. De plus ce mode est dsactiv
par la suite si la puissance requise est infrieure 5 kW.
"")
Relay Hybrid mode ON/OFF
OQICa
Operator1
Figure 73 Dtermination du mode hybride : schma Simulink
6.5.3 Commande de couple du MCI et de vitesse de la gnratrice
Une fois la puissance requise dtermine et le mode hybride activ, la commande de
couple du moteur combustion doit tre calcule ( TMci ) ainsi que la consigne de
vi tesse de la gnratrice ( m gn )
l
{J)MCI_opt Calcul
{J)
eq
ICE:
m=f(P)
vitesse
gnratrice
gn
Calcul du T.
MC/
..
couple du
...
MCI
Figure 74 Commande de couple du MCI et de vitesse de la gnratrice
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
108
6.5.3.1 Calcul de mgn
La premire tape consiste calculer la vitesse optimale du moteur combustion
( mMci _opr) connaissant la puissance requise du vhicule ( P,.eq). Cette caractristique est
dtermine par le bloc SimDriveline du moteur combustion. Elle correspond
l'quation d'un polynme de degr 3 tel que:
(6.12)
Selon la documentation du bloc SimDriveline du moteur combustion, les
termes p
1
= p
2
= p
3
= 1, sont choisis de faon satisfaire les quations suivantes :
(6.13)
(6.14)
Ces quations permettent d'ajuster l'allure des courbes des caractristiques puissance-
vitesse et couple-vitesse du MCI. Ainsi, connaissant les valeurs de la
caractristique P( m) , pour n'importe quelle valeur de P, on peut c.onnatre sa vitesse
angulaire m correspondante. Chaque lment (MCI, moteur lectrique et gnratrice) est
reli au train plantaire. La vitesse de rfrence de la gnratrice peut alors tre
dtermine des quations (6.7) et (6.8) faisant intervenir la raison du train plantaire (K).
(6.15)
Le terme mgn correspond la vitesse angulaire du pignon soleil ( msoleil ), mveh la
vitesse angulaire de la couronne ( mcouronne ), et le terme mMci _opr correspond la vitesse
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
109
angulaire du porte-satellites ( coporte-sat ). L'quation du bilan des vitesses du train
plantaire ( 4.30) est vrifie.
6.5.3.2
La commande de couple TMci du moteur combustion est le ratio de la puissance
maximale de ce dernier ( PMci_max) par rapport la puissance requise du vhicule ( P,.eq).
La puissance maximale tant de 57 kW.
6.5.4 Commande de couple du moteur lectrique Tmoteur
OJmoteur
{gn--------..-J
T,.equis
~ a t l e r i e
Tmoteur
Figure 75 Commande de couple du moteur lectrique
22
22
Ce graphique a t tir et adapt de l'article de B. Jeanneret, R. Trigui, F.Badin, F.Harel [3].
(6.16)
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
110
Les quations (6.7) et (6.8) associes au train plantaire permettent dans un premier
temps de dterminer les couples transmis la gnratrice par le pignon soleil ( Tgn ) et
directement au systme de transmission par l'intermdiaire de la couronne
connaissant le couple du moteur combustion (couple du porte-satellites ou TMci ). Le
couple de rfrence du moteur lectrique ( Tmoteur ) est gal au couple rsultant de la
puissance fournie par la gnratrice Tgn plus celui rsultant de la puissance transmise
par la batterie ( Ce dernier peut tre vu comme un couple additionnel dans le cas
o le conducteur demande soudainement une puissance supplmentaire (forte
acclration dans le cas d'un dpassement par exemple). Le moteur combustion ne
pouvant pas fournir toute la puissance, la batterie fournit alors une puissance
additionnelle au moteur lectrique donc un couple additionnel au vhicule ( Ce
couple est la diffrence entre le couple requis au total par le vhicule ( r;equis ) et le couple
transmis par le moteur combustion directement aux roues par l'intermdiaire de la
couronne du train plantaire ( T;,ouronne) .
6.6 Conclusion
L'architecture srie/parallle reprend les mmes lments que l'architecture srie tudie
aux chapitres 4 et 5, laquelle s'ajoute un dispositif de gestion de l'nergie et un train
plantaire picyclodal. Ce train plantaire permet de rpartir la puissance du moteur
combustion la gnratrice et aux roues.
La gnratrice tant connecte au pignon soleil qui est l'lment mcanique du train
plantaire comportant le moins de dents, cette dernire doit pouvoir tourner des
vitesses leves. De nouveaux paramtres ont t dtermins pour la gnratrice et son
entranement pour disposer d'une puissance nominale de 30 kW et d'une vitesse
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
Ill
maximale de 10000 r/min. Les paramtres du moteur lectrique, et de 1 'entranement et
ceux de tout le systme de transmission sont identiques ceux du modle srie.
Un sous-systme de gestion de 1' nergie a galement t implant. Ce sous-systme
permet de calculer, connaissant la vitesse du vhicule (vitesse de rotation de la couronne
du train plantaire plus exactement) et la position de la pdale d'acclrateur, les
consignes de couple du moteur lectrique et du moteur combustion, la consigne de
vitesse de la gnratrice et enfin la dtection du mode hybride du vhicule. Ce modle
comporte des lments Simulink pour la partie commande (systme de gestion de
l'nergie), des lments SimPowerSystems pour les systmes lectriques (moteur,
gnratrice et convertisseur CC/CC), et des lments SimDriveline pour le systme
mcanique (MCI, systme de transmission et train plantaire).
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
CHAPITRE 7
RSULTATS DE SIMULATION DU MODLE SRIE/PARALLLE
7.1 Introduction
Ce chapitre a pour objectif de dcrire les rsultats du modle srie/parallle du vhicule
hybride. La simulation est effectue sur un cycle de 14 secondes permettant de passer
travers chacun des modes de fonctionnement du vhicule de la mme faon qu'au
chapitre 5 pour la simulation du modle srie. Les rsultats prsents traitent
principalement l encore des coulements de puissance entre les diffrents sous-
systmes et particulirement de ceux entre le MCI et les lments composant le train
plantaire, la batterie ainsi que la gnratrice et le moteur lectrique.
La simulation a t effectue avec un pas de calcul de 60 fiS ( T. = 60 fiS) .
7.2 Dfinition des consignes
Le sous-systme de gestion de 1' nergie, tudi dans le chapitre prcdent, doit fournir
pour le modle srie/parallle deux consignes de couple : une pour le moteur
combustion interne et une seconde pour le moteur lectrique. Ce sous-systme doit
galement fournir une consigne de vitesse pour la gnratrice et enfin dtecter le
fonctionnement hybride. Ces diffrentes consignes sont calcules principalement en
fonction de la position de la pdale d'acclrateur ainsi que de la vitesse du vhicule et
plus exactement la vitesse de la couronne du train plantaire. Le moteur y est connect et
le systme de transmission (bote de vitesses) est engren.
La position de la pdale d'acclrateur est gale 0,7 durant toute la simulation.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
113
Cependant, dans le but de parcourir tous les modes de fonctionnement sur le mme cycle
de simulation, les entranements lectriques des moteurs doivent pouvoir tre allums ou
teints. La figure 76 montre les tats logiques de chaque moteur. Un tat '0' reprsente
un moteur ou un entranement lectrique teint tandis qu'un tat '1' reprsente un
moteur ou un entranement lectrique allum.
MCI: OFF !
Mot. lee. : ON!
Gn.: OFF '
0
MCI : ON ! MCI : ON
Mot. lee. : ON 1 Mot. lee. : OFF
Gn. : ON 1 Gn. : ON
51
9
MCI: OFF
Mot. lee. : ON
Gn.: OFF
t(s)
~ ~ ~ e : ~ ~ ~ ~ ~ ~ ~ : ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ - - - - - - - - - - - - ~ ~ - - - - - - - - - - - - . ~
Moteur 1
combustion
(MCI)
0
~ - - - - - - ~ - - - - - - - - - - - - ~ - - - - - - - - - - - - ~ - - - - - - - - - - - . ~
1
Gnratrice
0
'
Acclration !
Mode hybride OFF 1
0 < Pcar < 15 kW
Figure 76
1
Forte acclration ! Conduite normale et !
Mode hybride ON ! recharge de la batterie!
Pcar> 15 kW i 1
Freinage
tats logiques des moteurs durant la simulation
23
23
Le terme moteur empioy pour le moteur lectrique et la gnratrice dsigne plus prcisment leur
entra"mement lectrique associ.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
114
Au dmarrage, le fonctionnement est purement lectrique, puis lorsque la puissance
requise par ce dernier est suprieure 15 kW, le mode srie/parallle est activ (forte
acclration) puis le mode parallle seul est utilis (conduite normale). Enfin le mode
srie est nouveau sollicit lors du freinage.
L'arrt ou la mise en marche des entranements lectriques est ralise en multipliant le
signal d'entre (couple mesur ou vitesse mesure) et le signal de consigne par O. Ainsi
aucun effort de commande n'est demand au rgulateur de 1' entranement et il peut donc
tre considr comme arrt.
Tmes_out
T,.ef out
Tmes_out
Contrleur
de couple
Commande du
moteur lectrique
Nref _in
Nmes_out
Nref _out
Nmes_out
Contrleur
de vitesse
Commande de la
gnratrice
Figure 77 Extinction et mise en marche des entranements lectriques
7.3 Rsultats gnraux
Avant d'analyser les diffrents coulements de puissance pour chaque mode de
fonctionnement, cette partie prsente les rsultats gnraux du systme sur le cycle
complet de simulation, savoir les performances dynamiques du vhicule (acclration,
vitesse linaire), le bilan de puissance global du systme, le bilan de puissance et de
vitesse du train plantaire.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
115
7.3.1 Performances dynamiques du vhicule
La vitesse du vhicule est directement lie la vitesse de la couronne du train plantaire
o l'arbre du moteur lectrique est connect. La figure suivante reprsente la vitesse
linaire du vhicule (km/h) et la vitesse de la couronne du train plantaire (radis) pour
une acclration constante de 0.7 (pdale d'acclrateur enfonce 70%).
Vitesse du vhicule (km/h)
64 .............. ; .............. .............. : ...............
50 .............................. :
0
0 2 4 6 8 10 12 14
Vitesse de la couronne du train plantaire ou du moteur lectrique (rad/s)
300
200
0
0
,: 00 ... : 0 :
.. ..... :.
: : - .
!:::
. .
. .
. .
. .
. .
. .
2 4 6 8 10 12 14
Temps (s)
Figure 78 Vitesse linaire du vhicule et vitesse angulaire de la couronne
On peut remarquer que l'acclration n'est pas constante malgr que la position de
l'acclrateur le soit. Ceci, est d au sous-systme de gestion de l'nergie, qui fait
fonctionner le vhicule dans diffrents modes de fonctionnement. On peut remarquer
que l'acclration se fait sans perturbation jusqu' la valeur de 64 km/h environ t = 9
s. t = 5 s, l'acclration se fait moins forte cause du passage du mode srie/parallle
au mode parallle seul. Le profil de vitesse de la couronne du train sur laquelle est
connect le moteur lectrique possde par consquent le mme profil de vitesse.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
116
7.3.2 Bilan de puissance
Le bilan des puissances circulant dans le systme doit vrifier les quations ( 6.1) ( 6.2) et
(6.3). L'quation (6.2) montre que la puissance dlivre au moteur lectrique est gale
la puissance dlivre par la gnratrice plus celle de la batterie. L'quation (6.3) montre
que la puissance du vhicule (ou puissance transmise au systme de transmission) est
gale la puissance fournie par le moteur lectrique plus celle transmise par la couronne
du train plantaire. Cette dernire correspond la puissance transmise par le MCI moins
celle transmise la gnratrice (quation ( 6.1) ).
L'quation (6.2) est illustre par la figure suivante. Sur tout le cycle de simulation, on
peut voir que cette quation est vrifie et ce pour tous les modes de fonctionnement.
x 1 o
4
Puissance en jeu dans la batterie 0/V)
5 r:rrrr
0 ........... ; ............... ; . . . . . . . . .... : ............... ............... .............. ; ............ .
. .
. .
. .
.............. : ................ : ............... : ............................. : ............... ; ............. .
-5
0 2 4 6 8 10 12 14
}( 10
4
Puissance dlivre par la gnratrice 0/V)
0
0 2 4 6 8 10 12 14
x 1 o
4
Puissance en entre du moteur lectrique 0/V). Pmoteur = Pbatterie + Pgnratrice
5 :. . H_ooooooooooooo
0 ......................... -: ...... ---------7----,
. .
. .
. .
-5 .. 0 : 0 : 0 : 0. 0. 0 : ;,
0 2 4 6 8 10 12 14
Temps (s)
Figure 79 Bilan de puissance : gnratrice, batterie, moteur lectrique
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
Les oscillations t = 0.93 s, t = 5 set t = 9 s, sont causes par la mise en marche ou
1 'arrt d'un entranement lectrique.
117
La figure 80 illustre cette fois l'quation (6.3). Dans la dernire partie de la figure, la
courbe de la puissance en entre du moteur lectrique est parfaitement superpose celle
de la puissance fournie par la batterie additionne celle en sortie de la gnratrice. On
peut galement remarquer que cette puissance provient basse vitesse (en dbut de
simulation) principalement de la batterie et que pour des vitesses plus leves elle
provient de la gnratrice. Le moteur combustion est principalement utilis. Ceci
caractrise pleinement le comportement d'un systme hybride.
Puissance en sortie du moteur lectrique 0N)
0 0. 0 : 0 1-----------i----,' ...... ;. 0 0. 0 0
. . : :
. .
: .
0 2 4 6 8 10 12 14
)( 10
4
Puissance transmise par la couronne du train 0N)
0
........ r ............. .............. : ............ i .............. . ! . ............ .
0 2 4 6 8 10 12 14
x 10
4
Puissance vhicule 0/lf). Pvhicule = Pmoteurout + Pcouronne
J .. ;
______ ______
-4
0 2 4 6 6 10 12 14
Temps (s)
Figure 80 Bilan de puissance du vhicule
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
118
La figure 81 illustre pour finir l'quation (6.1). Dans la dernire partie de la figure, la
courbe de la puissance du vhicule est parfaitement superpose celle de la puissance de
la couronne du train additionne celle du moteur lectrique. La puissance de la batterie
fournit une puissance additionnelle lors d'une forte acclration (2 s < t < 5 s).
Puissance en entre de la gnratrice 01\f)
... > .............. : .............. - ~ ............... i .............. - ~ ............. .
: : :
0 ........,.....,.J.\ j ............. '[ .............. j ............. : ...... .
-1 ~ - - - - - - ~ - - - - - - ~ - - - - - - - - ~ - - - - - - ~ - - - - - - - - ~ - - - - - - ~ - - - - - - ~
0 2 4 6 8 10 12 14
)( 10
4
Puissance transmise par la couronne du train 01\f)
2.-------.--------.-------.-------,.-------.--------.-------,
0
........ - ~ ............... i .............. :. . . . . . . . ...... : .............. : ............. .
. . ... ']' .............. [ .............. 1 ............... ~ ...... .
- 1 ~ - - - - - - ~ - - - - - - ~ - - - - - - ~ - - - - - - ~ ~ - - - - - - ~ - - - - - - ~ - - - - - - ~
0 2 4 6 8 10 12 14
x 1 o
4
Puissance MCI 01\f). Pm ci= Pgn + Pcouronne
- 2 ~ - - - - - - ~ - - - - - - ~ - - - - - - ~ - - - - - - - - ~ - - - - - - ~ - - - - - - ~ - - - - - - ~
0 2 4 6 8 10 12 14
Temps (s)
Figure 81 Bilan de puissance : MCI, gnratrice, couronne du train
7.3.3 Bilan du train plantaire
Dans le chapitre 6, il a t montr que le train plantaire tait un des lments principaux
du systme srie/parallle et que son comportement devait vrifier deux quations. Celle
de la loi de conservation de l'nergie (6.9) et la formule de Willis (6.4). Les deux figures
ci-aprs montrent le bilan des vitesses (formule de Willis) du train plantaire. On y
prsente, les vitesses angulaires de la couronne, du pignon soleil et du porte-satellites.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
119
La deuxime figure montre le rsultat de la formule de Willis. On peut voir que ce
rsultat sur tout le cycle de simulation est toujours gal -2.6 qui est gal la raison du
train plantaire. Le comportement des parties mobiles du train plantaire du point de vue
vitesse angulaire est galement conforme celui dcrit au sujet du train plantaire dans
le chapitre 2, figure 30.
Vitesse angulaire du pignon soleil (rad/s)
500 ....... .............. f .............. .............. .............. ...... .
. . .
: :
o ........... T .............. r .............. 1" ............. [ ............... 1 .............. T ........... .
Vitesse angulaire de la couronne (rad/s)
400.-------.-------.-------.-------,--------.-------.-------,
200
r:l::
0
jrjr:t
0 2 4 6 8 10 12 14
Vitesse angulaire du porte-satellites (rad/s)
400 . 1
20
:=zr. .r 1 r . , . ...
-200 : l : : l :
0 2 4 6 8 10 12 14
Raison du train plantaire
-1.------.-------.------.-------.-------.------,.------.
-2.6 1-------;__------..;..--------------...;.--------;-------__;_----l
_______ _____ ______ ______
0 2 4 6 8 10 12 14
Temps (s)
Figure 82 Vitesses angulaires du train plantaire : formule de Willis
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
120
L'quation de la loi de conservation de l'nergie est illustre par la figure ci-aprs. Cette
figure montre que la somme de chacune des puissances des lments du train plantaire
est nulle, ce qui vrifie donc 1' quation.
x 10
4
Puissance transmise au pignon soleil 0fV)
0 : 0 0 0 0
. . . .
. . . .
. . .
0 ...... .............. .............. .............. j....... . .
: : : :
0 2 4 6 8 10 12 14
x 1 o
4
Puissance transmise au porte-satellites 0fV)
4.-------.--------r-------.--------.-------.--------.-------,
: : !
. r.. .
. , ' ' ' 1 l . . -
0 2 4 6 8 10 12 14
x 10
4
Puissance transmise par la couronne 0fV)
2.------,,------,,------.-------.-------.-------.-------.
........ ; .......... 0 ... ............... : .. 0 ........ 0 .... : .............. 0; ....... 0 .. 0 ..
0
: : : :
0
. . . .
0 2 4 6 8 10 12 14
x 1010 Loi de conservation de 1 nergie
2.-------.--------r-------.--------.-------.--------.-------,
0
-2
1 r : t 1
0 2 4 6 8 10 12 14
Temps (s)
Figure 83 Bilan de puissance du train plantaire
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
121
7.4 Analyse des rsultats selon les diffrents modes de fonctionnement
Cette partie traite des rsultats obtenus lors de chaque mode de fonctionnement. Le cycle
de simulation est divis en intervalle pour chacun des modes parcourus. Comme pour le
modle srie, l'analyse porte essentiellement sur les coulements de puissance entre les
principaux sous-systmes du modle.
7.4.1 Dmarrage, basses et moyennes vitesses
Le premier mode de fonctionnement rencontr est celui du dmarrage, basses et
moyennes vitesses. Il s'agit de l'intervalle 0 s < t < 0,93 s exactement. Le vhicule est
m uniquement par la puissance dlivre par la batterie au moteur lectrique.
x 1 o
5
Puissance dlivre par la batterie et puissance reue par le moteur lectrique 0/11)
0.5
....... r ......... "( ......... \ .......... .......... \ .......... \ .......... \ ......... r ........ r ....... .
. i . . ....... : .......... : .......... : .......... : .......... j .......... ; .......... .......... ; ........ .
0
. : . :
0
: : r r r r
. : ......... r ......... : .......... : ......... : ......... : .......... ; .......... : .......... : ......... .
-0.5
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Puissance en sortie du moteur lectique et puissance du vhicule 0/11)
10000
____ ____ _____ _____
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Temps (s)
Figure 84 Bilan de puissance lors du dmarrage ( P,.eq < 15kW)
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
122
Tant que la puissance requise par le vhicule ( ) > 15 kW, le moteur combustion et
1' entranement lectrique de la gnratrice sont arrts. Ainsi le bilan des puissances
peut s'crire :
P,atterie = P;nmoteur
= P,hicu/e
(7.1)
(7.2)
Sur la figure prcdente, les rsultats obtenus confirment ces deux quations. Les
courbes de la puissance moyenne de la batterie et celle en entre du moteur lectrique se
superposent ainsi que les courbes de la puissance transmise par le moteur lectrique et
celle reue en entre du systme de transmission. t = 0.94 s, la puissance du vhicule
atteint 15 kW, ce qui met fin au mode tout lectrique.
7.4.2 Forte acclration
Lorsque la puissance demande est suprieure 15 kW, le vhicule fonctionne en mode
hybride. La puissance requise par le vhicule est transmise par le moteur lectrique
aliment par la batterie et la gnratrice, ainsi que par le MCI par l'intermdiaire de la
couronne du train plantaire.
Ce mode est compris sur l'intervalle 0.94 s < t < 5 s. La figure suivante vrifie
l'quation (6.3). Sur la dernire partie de la figure, on observe que la puissance du
vhicule est superpose la puissance en sortie du moteur lectrique plus la puissance
transmise par la couronne du train plantaire.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
123
Puissance en sortie du moteur lectrique 0/11)
: .. ........t......... .. t........:
i i i i i i i
0.5 1.5 2 2.5 3 3.5 4 4.5 5
Puissance transmise par la couronne du train plantaire 0/11)
......... : .......... ........... . . . . . . . . . . . .. : ............ : ........... : ........... : ......... .
0 .......... :-.... . .... ....................... i ........... : ........... ; ........... ........... : ......... .
0.5 1.5 2 2.5 3 3.5 4 4.5 5
x 10
4
Puissance du vhicule : Pvhicule = Pcouronne + Pmotor 0/11)
... ... ......... ... ......... .. ........ .. ........
i i i i i J j _i
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Temps (s)
Figure 85 Bilan de puissance lors d'une forte acclration
La puissance en entre du moteur lectrique est gale la puissance dlivre par la
batterie et la puissance fournie par la gnratrice. Cependant, lors d'un court instant, la
gnratrice fonctionne en mode moteur (couple et vitesse positifs) correspondant au
comportement de l'alterno-dmarreur dj rencontr dans la simulation du modle srie
(partie 5.4.1). La gnratrice fonctionne en mode moteur pour satisfaire la consigne de
vitesse en entre et l'effort de commande (commande de couple) est maximal. La
gnratrice entrane le MCI (correspondant au mode compression de ce dernier) jusqu'
ce que la vitesse de rfrence soit atteinte par la gnratrice et que l'effort de commande
soit ngatif (commande de couple ngative) ce qui correspond l'intervalle 0.93 s < t <
1.71 s.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
124
Aprs t = 1. 7 s, le moteur combustion est entran, et entrane son tour la gnratrice
qui dlivre une puissance au moteur lectrique. La figure suivante montre la puissance
de la batterie, celle en entre du moteur lectrique et celle fournie dans un premier temps
la gnratrice et ensuite dlivre par cette dernire.
Puissance dlivre par la batterie 0/V)
..... 'l' ........... t ........... : ........... .......... '1' .......... ........... .
0.5 1.5 2 2.5 3 3.5 4 4.5 5
x 10
4
Puissance dlivre par la gnratrice 0/V)
.......... j .......... : .......... : ....... T .. .... . .... .... -:...:...:..:.. .. .. ... .... .:..:..:..:...: .... :. = ... .. .
0 ............ . ... ...... ; ............ : ........... : ............ : ........... : ........... :: ......... .
. . .
. . .
. . .
0.5 1.5 2 2.5 3 3.5 4 4.5 5
x 1 o
4
Puissance moteur lectrique : Pinmotor = Pgene + Pbatterie 0/V)
.. .H .. ;.;.H-
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Temps (s)
Figure 86 Fonctionnement en mode moteur de la gnratrice
7.4.3 Conduite normale et recharge de la batterie
t = 5 s, l'entranement du moteur lectrique est coup. Le moteur continue tourner
mais aucun effort de commande n'est appliqu. Aucun couple, et par consquent, aucune
puissance ne sont dlivrs en sortie. Le vhicule est m uniquement par le moteur
combustion qui transmet le couple ncessaire aux roues par l'intermdiaire de la
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
125
couronne du train plantaire. Ce dernier entrane galement la gnratrice qui recharge
alors la batterie. Ce mode est utilis durant l'intervalle 5 s < t < 9 s. Le bilan des
puissances peut donc s'crire de la faon suivante :
PMCI = P,hicu/e +
(7.3)
Puissance en entre de la gnratrice 0NJ
: . ...........i............x............:...i............ ............l...........-
______ _______
5 5.5 6 6.5 7 7.5 8 8.5 9
x 10
4
Puissance du vhicule 0NJ
; : . . ; 1 ........ .. .. . L L -
. . . .
i i i i i i i
5.5 6 6.5 7 7.5 8 8.5
Puissance du MCI : Pmci = Pgn + Pvhicule 0NJ
2.4 ........... ............ : ............ : ............ : ............ : ........... ............ : .......... .
... H JH.H ; .. H. H.H. IH HH)H . . : . .
1.8
5 5.5 6 6.5 7
Temps (s)
7.5 8 8.5
Figure 87 Bilan de puissance en conduite normale et recharge de la batterie
7 .4.4 Freinage
9
9
Le dernier mode de fonctionnement du cycle de simulation est celui du freinage. Durant
ce mode, l'nergie cintique du vhicule est retourne la batterie par l'intermdiaire du
moteur lectrique en mode gnratrice.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
126
t > 9 s, l'entranement de la gnratrice est coup et la consigne de couple du moteur
combustion est mise zro. Le couple de rfrence du moteur lectrique, calcul par le
sous-systme de gestion de 1' nergie, est multipli par -1 afin de faire fonctionner le
moteur en mode gnratrice. Le moteur fournit donc une puissance cette fois la
batterie. La figure suivante montre qu'aucune puissance n'est dlivre par la gnratrice.
Le bilan de puissance est le suivant :
pmoteur =
(7.4)
x 10
4
Puissance dlivre par la gnratrice 0N)
1
!
:
!
0
-1
9 9.5
i i i i i
;
i i
10 10.5 11 11.5 12 12.5 13 13.5 14
x 10
4
Puissance retourne au moteur en fonctionnement gnratrice 0N)
-3.2
.
-3.4 1'' ........ : ......... : ...... : .... .
1 j_
...................... , ................... .
. .
. .
. .
9 9.5 10 10.5 11 11.5 12 12.5 13 13.5 14
x 10
4
Puissance retourne la batterie : Pmoteur = Pbatterie 0N)
llw. . . .
-5 . . . . . . ......... i ................................ ; .......... : .......... ' ...............................
i i i i i ; i i
9 9.5 10 10.5 11 11.5 12 12.5 13 13.5 14
Temps (s)
Figure 88 Bilan de puissance en mode freinage
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
127
7.5 Temps de simulation
Le cycle de simulation de 14 secondes a t effectue en 50 secondes environ en
utilisant un pas de calcul de 60 ps , ce qui veut dire que le temps rel de simulation est
approximativement 3.57 fois le cycle de simulation. Ce rsultat est donc comparable
celui obtenu pour le modle srie. Le modle srie/parallle est plus complexe, intgrant
un sous systme de gestion de 1' nergie et un train plantaire. Ces temps de simulation
montrent clairement que SimDriveline est un outil complmentaire pour simuler des
systmes lectromcaniques complexes et notamment 1' laboration d'un systme de
propulsion hybride et de son systme de gestion de l'nergie. Le tableau suivant rsume
les temps de simulation obtenus pour le modle srie et le modle srie/parallle.
Tableau IX
Temps de simulation : modles srie et srie/parallle
Modle srie Modle srie/parallle
Cycle de simulation 10 s 14 s
Temps rel de
35 s 50s
simulation obtenu
Rapport temps rel
3.5 3.6
1 cycle de simulation
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
128
7.6 Conclusion
Ce chapitre a permis de dcrire dans un premier temps les signaux de rfrence
appliqus aux moteurs et leurs entranements chaque instant du cycle de simulation. Le
fonctionnement du modle srie/parallle pour diffrents modes de fonctionnement du
vhicule a ensuite t dcrit.
Les rsultats ont montr que le modle respectait le principe de fonctionnement du
systme THS II et notamment que les coulements de puissance entre les diffrents
sous-systmes taient cohrents. Le bilan des vitesses et des puissances pour le train
plantaire s'est montr conforme la thorie. Le sous-systme de l'nergie utilis a
montr une bonne stabilit dans les signaux de commande pour chacun des moteurs ainsi
que les signaux obtenus. Les performances dynamiques de la voiture (vitesse linaire et
acclration) (figure 78) se sont montres cohrentes avec celles d'un vhicule de ce
type.
En ce qui concerne les temps de simulation, ils sont comparables ceux du modle srie.
Le modle hybride srie/parallle est pourtant plus complexe car il intgre un sous-
systme de gestion de 1 'nergie et un modle de train plantaire picyclodale. Ces
temps se sont avrs ainsi relativement bons. Ceci a montr que SimDriveline et
SimPowerSystems sont deux modules complmentaires pour la modlisation et la
simulation de systmes lectromcaniques complexes et de leurs commandes associes.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
CONCLUSION
Ce projet a consist la modlisation et la simulation d'un systme multi-domaines
complexe sous un unique environnement de travail. L'environnement de travail utilis
fut celui de Matlab/Simulink et de ses modules contenus dans Physical Modeling. Le
systme tudi est le systme de propulsion d'un vhicule hybride lectrique, de la
Toyota Prius. En effet, l'tude des systmes multi-domaines est particulirement
intressante puisqu'elle pose des problmes de stabilit et de non-linarits importantes.
L'objectif tait de concevoir un modle comportemental du systme. Ce dernier est
compos d'une partie mcanique, d'une partie lectrique et d'une partie commande.
Le premier systme multi-domaines tudi est celui de la bobineuse en utilisant le
module SimMechanics pour la modlisation des forces appliques la bobineuse. Les
simulations ont montr des rsultats identiques ceux du modle original. Par contre les
temps de simulation obtenus ont t multiplis par 10 par rapport ceux du modle
entirement Simulink.
Par la suite, l'architecture srie d'un vhicule hybride a t modlise en utilisant les
modules SimPowerSystems pour la partie lectrique et le module SimDriveline pour les
lments mcaniques. Le comportement de ce modle a pu tre vrifi l'aide de
rsultats analytiques et graphiques. Cette tude est axe sur les changes de flux de
puissance entre les diffrents sous-systmes.
Finalement, un modle de l'architecture srie/parallle a t constitu. Cette architecture
est la mme que celle du modle srie, laquelle est ajoute un systme de gestion de
l'nergie, afin que chaque moteur fonctionne dans sa plage de haut rendement, ainsi
qu'un systme de rpartition de la puissance du moteur combustion. L'tude
analytique et graphique des principaux flux de puissances a permis de valider le
comportement du modle selon diffrents modes de fonctionnement du vhicule. Les
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
130
temps de simulation se sont avrs relativement bons ce qui a montr la complmentarit
des modules SimPowerSystems et SimDriveline pour cette tude (3,5 fois le temps rel).
Ces temps de simulation ont pu tre obtenus en utilisant des entranements lectriques
valeurs moyennes. Ces derniers permettent de remplacer les interrupteurs de puissance
par des sources de courant et de tension commandes qui ont permis de multiplier par 30
le pas de calcul.
Les contributions personnelles apportes ce projet furent diverses. En ce qui concerne
la modlisation multi-domaines, ce modle fut le premier systme multi-domaines
ralis sous Matlab/Simulink compos d'lments provenant de diffrents modules de
l'ensemble Physical Modeling. Ce travail a permis de montrer que la complmentarit
des modules de Physical Modeling dpendait du systme tudi. Le modle complet de
l'architecture srie/parallle a galement montr une bonne stabilit et robustesse malgr
les nombreux sous-systmes et paramtres prendre en compte. Le passage d'un
domaine un autre ainsi que l'tude des signaux se fait assez simplement en utilisant des
capteurs ou des actuateurs.
En ce qui concerne le modle du vhicule hybride lui-mme, le comportement du
systme et particulirement celui du sous-systme de gestion de l'nergie s'est montr
conforme par rapport la ralit. Un cycle de simulation parcourant chacun des modes
de fonctionnement a t mis en place. Les rsultats ont dmontr que la puissance aux
basses vitesses provient principalement de la batterie, alors que pour des vitesses plus
leves le moteur combustion est principalement mis contribution. C'est un
comportement typique du vhicule hybride et de son architecture srie/parallle. Ce
modle comporte les lments cls d'un tel systme qui peut tre repris et servir de base
pour l'laboration et le test d'un sous-systme de gestion de l'nergie plus avanc pour
le contrle de chaque moteur et 1' tude de la rduction des missions de particules
polluantes.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
RECOMMANDATIONS
Le projet de matrise a pu tre complt dans son intgralit et les rsultats obtenus ont
t conformes aux prvisions et aux hypothses de dpart. Cependant le modle a t
ralis suivant diffrentes hypothses simplificatrices et par consquent a montr
certaines limites. Plusieurs amliorations pourraient rendre le modle encore plus prcis.
La premire chose que le modle propos pourrait inclure, est un modle de batterie plus
conforme la ralit. En effet, la batterie a t modlise par une source de tension
idale. Or la tension d'une batterie varie selon la charge et dispose d'une rsistance
interne variable. Les temps de charge et de dcharge ne sont pas les mmes et forment
plutt ceux d'un cycle d'hystrsis. Il serait donc trs pertinent de pouvoir inclure un
modle prcis de batterie.
Dans la partie transmission mcanique de la Toyota, la bote de vitesses a t modlise
en utilisant un rapport fixe. Or dans le systme rel de la Prius, il s'agit d'une
transmission variable en continu (CVT) dont le rapport de rduction est gr
lectroniquement. galement, dans le systme de transmission, des pertes pourraient tre
reprsentes pour obtenir un bilan nergtique du vhicule plus prcis.
Enfin le sous-systme de gestion de 1 'nergie pourrait prendre en compte 1' tat de charge
de la batterie ainsi que le rapport de transmission de la bote de vitesses. L'objectif du
vhicule hybride tant 1' amlioration du rendement nergtique du vhicule ainsi que la
diminution de ses missions polluantes, une tude sur ces sujets pourrait tre entreprise.
Par consquent, le systme de gestion de l'nergie pourrait tre plus fidle la ralit en
tenant compte de ces paramtres afin de complter ces objectifs.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
ANNEXE 1
CARACTRISTIQUES TECHNIQUES DE LA TOYOTA PRIUS
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
133
Moteur combustion interne
Type de moteur Moteur 1.5116 soupapes VVT-i
Nombre de cylindres 4
Distribution 2ACT
Alsage x Course 75 mm x 84.7 mm
Taux de compression 13.0
Cylindre 1497 cm
3
Puissance maxi. 57 kW 5000 rlmin
Couple maxi. 115 Nm 4000 rlmin
Moteur lectrique
Type de moteur Moteur synchrone aimants permanents
Puissance maxi. 50 kW de 1200 rlmin 1540 rlmin
Vitesse maxi. 5000 rlmin
Couple maxi. 400 Nm de 0 1200 r/min
Gnratrice lectrique
Type de moteur Moteur synchrone aimants permanents
Puissance nominale 30kW
Vitesse nominale 10000 rlmin
Batterie
Puissance maxi. 20kW
Tension 202 v
Type de batterie Nickel-mtal hydrure (Ni-MH)
Moteur thermique et lectrique combins
Puissance maxi. 82 kW partir de 85 km/h
Couple maxi. 478 Nm de 0 22 km/h
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
134
Transmission
Bote de vitesses Variable en continu
Performances
Vitesse maxi. sur circuit 170 km/h
Acclration de 0 100 km/h 10.9 s
Dpart arrt de 0 400 m 17.6 s
Consommation
Cycle extra-urbain (normes CE) 4.2/1 100 km
Cycle urbain (normes CE) 51/ 100 km
Cycle mixte (normes CE) 4.311 100 km
missions C02 104 glkm
Rservoir de carburant 451
Freins
Freins avant Disques ventils
Freins arrire Disques
Chssis
Suspension avant Indpendante type Mac-Phersor
Suspension arrire Essieu de torsion
Nombre de portes 5
Nombre de places assises 5
Pneumatiques
Dimensions 16 x 6 JJ alliage
Jantes 195/55 R 16
Capacit
Poids vide en ordre de marche total 1300 kg 1 1325 kg
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
135
Poids total autoris en charge 1725 kg
Volume du coffre mini. 1 maxi. 408/
Dimensions
Longueur x largeur x hauteur 4450 mm x 1725 mm x 1490 mm
Empattement 2700mm
Voie avant 1510 mm
Voie arrire 1480 mm
Rayon de braquage entre trottoirs 5.1 m 15.5 m
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
ANNEXE2
PARAMTRES DU MODLE SRIE/PARALLLE
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
1'----!-+Torqueproflle(T..,(W))
mee (radis)
HybndmodeOtl/Ofl bridm Qfll(tl
mode Onlcl'l
Enorgy Manag1mont SUbBf11i1m
----------,
Sun PMd .........
i !
canlerlotqUII{Nm)!
? : Double click here for more info
1 Proprits du modles : initialisation
cie
clear ali
Ts = 6e-5;
Kb = -2.6;
% time step
% planetary gear ratio
137
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% caractristique du moteur combustion
pl = 1; %initialisation pl,p2,p3 pour le polynome de degre 3
p2 = 1; % de facon a ce que: p 1 + p2 - p3 = 1
p3 = 1 ; % et que : p 1 + 2 *p2 - 3 *p3 =0
power = 0; % puissance normalise
j = 1 000; % nbre de points
i = 1; %numero itration
w = 1; % vitesse normalise
pmax = 57000; % puissance maximale du moteur thermique
radO = (5000*2*pi)/60; %vitesse du moteur a pmax (radis)
radmax = (6000*2*pi)/60; %vitesse maximale du moteur (radis)
wmax = radmax/radO; % vitesse maximale normalise
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
138
for w = 0:(1 *j) %pour 0 a vitesse maximale normalisee
power= (pl *(w/j)) + (p2*((w/j)*(w/j)))- (p3*((w/j)*(w/j)*(w/j))); %calcul de p(w)
powermatr(i, 1 )= power; % mise des valeurs dans une matrice
g(i,l) = (pmax/radO)*(power/(w/j)); %calcul de g(w) qui le calcul du couple(w)
abscisse(i,l) = (w/j); %matrice de l'echelle des abscisses
i = i+l; %on itere
end
abscisserpm = abscisse*((rad0*60)/(2*pi));
ordonnee = powermatr*pmax;
ordonnee(l,l) = 1;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% caractristique du moteur lectrique
wl = 126; %1200 r/min
w2 = 161; %1540 r/min
w3 = 524; %5000 r/min
for k = l:wl
N(k,l) = k;
couple(k,l) = 400; %de 0 a 1200r/min, couple constant
end
form=wl:w2
N(m,l) =rn;
couple(m,l) = 50000/m;% de 1200 1540 r/min, puissance constante
end
fork=w2:w3
N(k,l) = k;
couple(k,l) = ((-13.77*k) + 52215)/k;% 1540 a 5000 r/min, P dcroitjusqu' 45kW
end
N = (N(:,l)*60)/(2*pi);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
2 Le sous-systme lectrique
MotorDIIve301lW
Gene,.IOI' Tarn (Hm)
Qotn..,torT.m(Nm)
Electrical system buitt byG.Bailly and L. Dessaint
of Ecole de Technologie Superieure
2.1 Modle de la batterie
Tension
Rsistance
139
Torque Nf (Nm)
J---.JspHd m 1 ~ 1
EleelromapUe T ~ (N.m) C!J
1-+------1+ OCIDC convart.r Moklrtorqua(Nm)
OCIOCconvtrtar
MototDriYI50NN
202 v
o.o1 n
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
140
2.2 Convertisseur CC/CC
Duty Cycle UBus
)
OC bus
Q)..---+
+bat.
+ OC/OC converter + battery
0..----
-bat.
- OC/OC converter - battery
OC/OC converter
Ubus
Duty cycle
Uref
Bus OC controller UbusRef
Convertisseur CC/CC :
Rsistance: 0.01 n
Branche RC Condensateur: 35 mF
Tension initiale du bus CC : 500 V
Inductance de lissage 300pH
Rgulateur du bus CC :
Gain Ki 0.1
GainKp 0.005
Tension de rfrence 500 v
Filtre passe-bas
1
O.OOOls + 1
Frquence du signal
lOkHz
d'chantillonnage en dents de scie
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
141
2.3 Moteur lectrique et son entranement (modle valeurs moyennes)
1 ;;! ,.
1
1
J
SlgnaiBuUdar
1
Speed Controller1
N
Product1 cRocor apMd Vn rad/1):.
Clrl
VCCT
cRotoranallth.tam r-d)>
$P Product
"iiT' Torquej4-
cEiectromten.tlctorqua Ta(Nm:.
(N.m)
Mux l_abc
Three-phase lnverter
0
'{(
Speed (radia) PMSM1
cn-
A To LODC[
lb :r
: -
<D
Tc
MieL
B
- Me as ures
Moteur synchrone aimants permanents
Distribution du flux Sinusodale
Entre Couple (Nm)
Rsistance statorique o.oo5 n
Inductance sur 1' axe q 0.3mH
Inductance sur 1' axe d 0.3 mH
Flux induit des aimants 0.192 wb
Inertie 0.25 kgm
2
Coefficients de friction 0.005 Nms
Nombre de paires de ples 4
Commande vectorielle
Nombre de paires de ples 4
Flux induit des aimants 0.192 wb
Pas d'chantillonnage
Y:
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
142
Convertisseur triphas
Ron o.oot n
Frquence de la source 60Hz
Inductance sur 1' axe q 0.3mH
Inductance sur 1 'axe d 0.3 mH
Nombre de paires de ples 4
Flux induit des aimants 0.192 wb
Rsistance statorique o.oos n
Contrleur
Type de rgulation Rgulation de couple
Rampe d'acclration 1 0000 r/min/s
Rampe de dclration -10000 rlmin/s
Gain Kp 0.2
Gain Ki 10
Frquence de coupure du filtre passe bas lOOHz
Saturation positive du couple 400Nm
Saturation ngative du couple -400Nm
Pas d'chantillonnage 4*T
s
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
143
2.4 Gnratrice et son entranement (modle valeurs moyennes)
Speed Controller1 ] Lo
Hybrid
Step
4N
.orque
l
N" Ctrl
w
VECT
Spee
<Rotor 1pe1d v.m r1d/1
Torque
+-
---
sig
..:Rotor nw 1...
l_abc
<Eiectromlgnetle IO!llut Tl (N"m)>
Mu x
Electromagnetlc Torque (N.m)
m
Three-phase lnwrter
0
speed (radis) PMSM1
_aoc
-
=-:
A Ta
Mta
: m
lb
<D
Mlb
MiiOr'
B
Tc
r.tc
'--- Maas ures
Moteur synchrone aimants permanents
Distribution du flux Sinusodale
Entre Vitesse (radis)
Rsistance statorique o.o5 n
Inductance sur 1 'axe q 635 1-1H
Inductance sur 1' axe d 635 1-1H
Flux induit des aimants 0.192 wb
Inertie 0.011 kgm
2
Coefficients de friction 0.000472259 lVms
Nombre de paires de ples 1
Commande vectorielle
Nombre de paires de ples 1
Flux induit des aimants 0.192 wb
Pas d'chantillonnage
r:
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
144
Convertisseur triphas
Ron o.oo1 n
Frquence de la source 60Hz
Inductance sur 1' axe q 635 JLH
Inductance sur 1' axe d 635 JLH
Nombre de paires de ples 1
Flux induit des aimants 0.192 wb
Rsistance statorique o.os n
Contrleur
Type de rgulation Rgulation de vitesse
Rampe d'acclration 5000 r/minls
Rampe de dclration -5000 rlmin/s
GainKp 0.1
Gain Ki 2.5
Frquence de coupure du filtre passe bas 50Hz
Saturation positive du couple 45Nm
Saturation ngative du couple -45Nm
Pas d'chantillonnage 4*T
s
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
145
3 Le sous-systme mcanique
torquebeforageer
3.1 Train plantaire
Rapport couronne 1 pignon soleil 2.6
3.2 Moteur combustion interne (MCI)
Puissance maximale 57000 w
Vitesse puissance maximale 5000 rlmin
Vitesse maximale 6000 r/min
Inertie 0.5 kg.m
2
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
146
3.3 Bote de vitesses
Rapport de rduction 5
Inertie
3.4 Diffrentiel
Rapport de rduction 1
3.5 Dynamique longitudinale du vhicule
Masse du vhicule 1325 kg
Distance entre le centre de gravit
1.35 m
et 1' axe des roues avant
Distance entre le centre de gravit
1.35 m
et 1' axe des roues arrire
Centre de graviter 0.5 m
Surface frontale 2.57 m
2
Coefficient arodynamique 0.26
Vitesse initiale Omis
Inertie sur chaque axe de sortie 0.5 kg.m
2
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
147
3.6 Dynamique du contact de la roue avec le sol
Rayon de la roue 0.3 m
Charge verticale value 3000N
Charge horizontale maximale la
3500N
charge verticale value
Facteur de glissement 10%
Longueur de relaxation la charge
0.2 m
verticale value
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
BIBLIOGRAPHIE
[ 1] A. Bouscayrol, X. Guillaud, Ph. De larue, "Hardware in-the-loop simulation of a
wind energy conversion system using Energetic Macroscopic Representation",
Industrial Electronics Society, 2005. IECON 2005. 32nd Annual Conference ofiEEE.
[2] A. Bouscayrol, "Formalismes de reprsentation et de commande appliqus aux
systmes lectromcaniques multimachines multiconvertisseurs ", thse prsente
l'universit des sciences et de technologies de Lille, 22 dcembre 2003.
[3] B. Jeanneret, R. Trigui, F.Badin, F.Harel, "New Hybrid concept simulation tools,
evaluation on the Toyota Prius car", The 16Th International electric vehicle symposium,
October 13-16, 1999 - Bejing - China.
[4] Powell B.K, Bailey K.E, Cikanek S.R, "Dynamic modeling and control of hybrid
electric vehicle powertrain systems", Control Systems Magazine, IEEE, Volume 18,
Issue 5, Oct. 1998, pages 17-33.
[5] Fellini R, Michelena N, Papalambros P, Sasena M, "Optimal design of automotive
hybrid powertrain systems", Environmentally Conscious Design and Inverse
Manufacturing, 1999. Proceedings. EcoDesign '99, Pages 400-405.
[6] Dean C. Karnopp, Donald L. Margolis, Ronald C. Rosenberg, "System dynamics: a
unified approach ", 2nd edition, Wiley-Interscience publication.
[7] Donald Margolis, "Bond graphs, modeling, and simulation in industry : sorne
examples where cast/y mistakes could have been avoided", IEEE International
Conference on Systems, Man and Cybernetics, 2002.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
149
[8] A. Emadi, K. Rajashekara, S.S. Williamson, S.M. Lukic, "Topological Overview of
Hybrid Electric and Fuel Cel/ Vehicular Power System Architectures and
Configurations", IEEE Transactions on vehicular technology, Volume 54, No 3, May
2005, Pages 763-770.
[9] Karen L. Butler, Mehrdad Ehsani, Preyas Kamath, "A Matlab-based Modeling and
Simulation Package for Electric and Hybrid Electric Vehicle design", IEEE
Transactions on vehicular technology, Vol. 48, No. 6, novembre 1999.
[10] Lee J.M, Cho G.H, "Modeling and simulation of electric vehicle power system",
Energy Conversion Engineering Conference, 1997. IECEC-97. Volume 3, pages 2005-
2010.
[11] Karin Jonasson, "Analysing Hybrid Drive System Topologies", Thse prsente
1 'universit de Lund, Sude, 2002.
[12] Paul C. Krause, Oleg Wasynczuk, Scott D. Sudhoff, "Analysis of electric
machinery and drive systems", 2nd edition, Wiley-Interscience publication.
[13] www.mathworks.com
[ 14] www.mathworks.com/products/simmechanics
[ 15] www .mathworks.cornlproducts/simdrive
[ 16] www.mathworks.com/products/simpower
[17] Toyota Motor Corporation, Public Affair Division, "Toyota Hybrid System THSII",
may 2003, http:/ /www. toyota.co.jp/ en/tech/ environmentlths2/index.html
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.
150
[ 18] Kawahashi A, "A new-generation hybrid electric vehicle an dits supporting power
semiconductor deviees", Power Semiconductor Deviees and ICs, 2004, Proceedings.
ISPSD '04. The 16th International Symposium on, Pages 23-29.
[ 19] S. Sasaki, "Toyota 's Newly Developed Hybrid Powertrain" , Proceedings of 1998
International Symposium on Power Semiconducter Deviees & ICs, Kyoto, 1998.
[20] Sbastien Delprat, "valuation de strategies de commande pour vhicules hybrides
parallles", thse prsente l'universite de Valenciennes et du Hainaut-Cambresis,
France, le 4 janvier 2002.
[21] Serge Cam peau, "Conception et analyse d'un vhicule hybride configuration
parallle", rapport de matrise, cole de Technologie Suprieure, 1997.
[22] George Henriot, "Trait thorique et pratique des engrenages: tome 1 ", 5ime
dition, Dunod.
[23] A. Di Napoli, F. Crescimbini, F. Giulii Capponi, L. Solero, "Control Strategy for
Multiple Input DC-DC Power Converters Devoted to Hybrid Vehicle Propulsion
Systems", Industrial Electronics, 2002. ISE 2002. Proceedings of the 2002 IEEE
International Symposium. Volume 3, pages 1036-1041.
Vous aimerez peut-être aussi
- TD SUPPORT PRDocument2 pagesTD SUPPORT PRmasteratsiiPas encore d'évaluation
- Exposé - ChaudièresDocument27 pagesExposé - ChaudièresAnis Bouhous100% (1)
- CM3 ASSEMBLAGES-generalitesDocument4 pagesCM3 ASSEMBLAGES-generalitesKhadija NdiayePas encore d'évaluation
- 2007 ShercoDocument60 pages2007 ShercoAnonymous BywpiUePas encore d'évaluation
- Transmission de Puissance: Compétences AttenduesDocument13 pagesTransmission de Puissance: Compétences AttenduesraouanemezianiPas encore d'évaluation
- Atex 1 BDocument61 pagesAtex 1 Bfranck RenéPas encore d'évaluation
- Steyr BepcoDocument48 pagesSteyr BepcocoolfforexPas encore d'évaluation
- Équipement Électrique 306 DieselDocument37 pagesÉquipement Électrique 306 Dieseldamienm49100% (2)
- Assemblage Boulonné ISO Non PrécontraintDocument6 pagesAssemblage Boulonné ISO Non PrécontraintSalaheddine OURPas encore d'évaluation
- Coffre MotoriseDocument9 pagesCoffre MotoriseYoussef TrimechPas encore d'évaluation
- Tour ParalleleDocument6 pagesTour ParalleleErraji HichamPas encore d'évaluation
- Capteur de PressionDocument32 pagesCapteur de PressionIssam100% (1)
- 9999 9999 186 FR-FRDocument360 pages9999 9999 186 FR-FRmohcin2Pas encore d'évaluation
- TP Electropneumatique TC 2023 AutoDocument7 pagesTP Electropneumatique TC 2023 Autoaltti bouayePas encore d'évaluation
- CT110f LNDocument35 pagesCT110f LNAmor GharsalliPas encore d'évaluation
- Lacertis 9.0Document2 pagesLacertis 9.0DavidPas encore d'évaluation
- Motopompes Incendie Portables TOHATSUDocument8 pagesMotopompes Incendie Portables TOHATSUDeanna BarrettPas encore d'évaluation
- ExosDePhysInssa 2023Document8 pagesExosDePhysInssa 2023Godwin BonkoungouPas encore d'évaluation
- ExDocument4 pagesExLion LionPas encore d'évaluation
- AssemDocument25 pagesAssemsarayoussef751189Pas encore d'évaluation
- Mines Ponts MP 2009 Si EpreuveDocument35 pagesMines Ponts MP 2009 Si EpreuveIlyas MhammediPas encore d'évaluation
- Chapitre 4 Dynamique Fluide IdéalDocument37 pagesChapitre 4 Dynamique Fluide IdéalNowe AhmadePas encore d'évaluation
- 10 - Resistance Au FeuDocument27 pages10 - Resistance Au FeuGénie civil100% (1)
- CANIVEAUX 60x60Document2 pagesCANIVEAUX 60x60TRAOREPas encore d'évaluation
- 2 Fileter-TarauderDocument4 pages2 Fileter-TarauderKhalid TamiPas encore d'évaluation
- 943386239le MouvementDocument3 pages943386239le MouvementNassim ChraitiPas encore d'évaluation
- Détendeur Thermostatique DanfossDocument28 pagesDétendeur Thermostatique DanfossriadhPas encore d'évaluation
- 4.alternateur 2Document52 pages4.alternateur 2dfgmy100% (1)
- TD 29 - Arc-BoutementDocument7 pagesTD 29 - Arc-BoutementMohamed AbaakilPas encore d'évaluation
- ResultatsDocument18 pagesResultatssmail djelladPas encore d'évaluation