Académique Documents
Professionnel Documents
Culture Documents
S Eries Temporelles: R Egression, Mod Elisation ARIMA (P, D, Q), Et Mod Elisation Espace - Etat
S Eries Temporelles: R Egression, Mod Elisation ARIMA (P, D, Q), Et Mod Elisation Espace - Etat
Transféré par
nanou_lmd_mathTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
S Eries Temporelles: R Egression, Mod Elisation ARIMA (P, D, Q), Et Mod Elisation Espace - Etat
S Eries Temporelles: R Egression, Mod Elisation ARIMA (P, D, Q), Et Mod Elisation Espace - Etat
Transféré par
nanou_lmd_mathDroits d'auteur :
Formats disponibles
Series temporelles : regression, modelisation ARIMA(p,d,q), et
modelisation espace-etat
29 juin 2006
Enseignant : Florin Avram
Objectif : Linterpolation : prevision ponctuelle, deterministe, et la regression : demarche
statistique plus complexe, qui va au dela de linterpolation en analysant les residus et en produi-
sant des intervales des conance, sont parmi les methodes les plus importantes dans les mathematiques
et statistiques appliquees. On les utilise par exemple pour la prediction des phenom`enes spatio-
temporaux en geostatistique, econometrie, meteorologie, sciences environmentales, ..., etc.
Le premier dilemme dans les series temporelles et la statistique spatiale est le choix entre
mod`eles stochastiques et deterministes (qui peuvent etre vues en eet comme cas particuliers
simples des premiers). Le deuxi`eme dilemme est le choix entre modelisation globale (regression,
modelisation ARMA)et modelisation locale, par exemple par splines (qui change en eet de mod`ele
quand cela semble opportune).
Nous allons aborder ces th`emes dans le contexte des series temporelles uni-dimensionelles,
en comencant par lapproche dinterpolation deterministe la plus simple : inspection graphique,
lissage par ltres, identication parametrique de la tendance et prediction des moindre carres. En
suite, nous examinons lapproche iterative statistique qui consiste ` a raner des mod`eles ARIMA
ou des mod`eles despace-etat, choisies conformement aux tests pour les residus. Eventuellement, la
demarche stochastique pourra aussi etre mise en oeuvre en partant dune linterpolation deterministe
plus sophistique, par splines.
Competences acquises : Les etudiants apprendront ` a utiliser des diverses methodes de
ltrage et prevision des series temporelles, notamment par la modelisation ARMA, et ` a tester les
residus pour evaluer la abilite des mod`eles choisies.
Volume horaire :
12 heures de cours : 1 heure et demi Jeudi 8 ` a 13 :40, S06, pour 8 semaines, et qui se
transformerons en suite en TD pour la neuvi`eme et dixi`eme semaines.
18 heures de TD : 1 heure et demi Vendredi 08 :00, S23, pour 10 semaines (et complet`ees
par trois heures pour les deux derni`eres semaines, ayant place dans la salle. de cours, Jeudi).
Materiels :
1. Notes de cours/TD, qui utilisent parties des notes de M. Lavielle (Universite Paris-Sud)
et A. Korabinski (Heriot-Watt) sur les series temporelles (toutes les coquilles sont de ma
responsabilite).
2. Notes WEB : A. Charpentier, M. Kratz, J-M. Dufour (en Fran cais) et RH. Smith, R. Weber(**
En Anglais), etc
http ://www.crest.htfr/pageperso/lfa/charpent/charpent.htm#TS
http ://www.math-info.univ-paris5.fr/ kratz/cours.html
http ://www.statslab.cam.ac.uk/ rrw1/timeseries/index.html
3. A. C. Harvey, Time Series Models.
4. J. Durbin and S.J. Koopman, Time series analysis by state space methods.
5. C. Gourieroux et A. Monfort, Cours de series temporelles.
1
Table des mati`eres
1 Introduction 3
2 Premier abord aux series temporelles/chroniques 3
2.1 Les composantes dune chronique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Quelques types de decomposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2.1 le mod`ele additif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2.2 le mod`ele multiplicatif(*) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2.3 les mod`eles mixtes(*) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 Filtres/moyennes mobiles 7
3.1 Fonctions generatrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.2 Filtres de lissage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.3 Filtres qui enl`event les composantes saisoni`eres . . . . . . . . . . . . . . . . . . . . . 10
3.4 Exercices : TD 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4 Modelisation stochastique des series temporelles 13
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.2 Processus stochastiques stationnaires . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.3 Exemples des processus stationnaires . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.3.1 Le bruit blanc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.3.2 Les processus lineaires et les moyennes mobiles MA(q) . . . . . . . . . . . . . 16
4.3.3 Les mod`eles autoregressifs AR(p) . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.3.4 Les mod`eles ARMA(p,q) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.3.5 Les mod`eles ARIMA(p,d,q) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.3.6 Les mod`eles SARIMA(p,d,D,q) . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.4 (*)Linversion des series des puissances et des ltres (B) . . . . . . . . . . . . . . . 21
4.4.1 Causalite des mod`eles AR(p) . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.4.2 Inversibilite des processus MA(q) . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.4.3 Causalite et inversibilite des mod`eles ARMA(p,q) . . . . . . . . . . . . . . . . 23
4.5 Exercices : TD 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.6 TP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.7 (*) La positivite : caracterization des suites de covariance . . . . . . . . . . . . . . . 27
5 La prevision lineaire 29
5.1 La prevision des processus ARIMA(p,d,0) . . . . . . . . . . . . . . . . . . . . . . . . 30
5.2 Prevision lineaire des mod`eles ARIMA(p,d,q) . . . . . . . . . . . . . . . . . . . . . . 32
5.3 Exercices : TD 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.4 Contr ole continu en series temporelles . . . . . . . . . . . . . . . . . . . . . . . . . . 35
6 Sommaire des denitions et resultats dans les series temporelles 37
6.1 Filtres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6.2 Causalite et inversibilite des mod`eles ARMA(p,q) . . . . . . . . . . . . . . . . . . . . 37
6.3 Prevision lineaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.4 Le syst`eme Yule Walker pour les correlations . . . . . . . . . . . . . . . . . . . . . . 38
7 Examens dentranement 39
7.1 Janvier 2005 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
7.2 Janvier 2006 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
7.3 Juin 2006 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
7.4 Examen dentranement 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
7.5 Examen dentranement 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
7.6 Examen 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
2
1 Introduction
Denition 1.1 Une serie chronologique (ou temporelle) est une succession dobservations au cours
du temps : {U
t
: t = 1, 2, ..., n, ...} = (U
1
, U
2
, ..., U
n
, ...)
Par rapport aux autres types de donnees statistiques, la particularite des series chronologiques tient
` a la presence dune relation danteriorite qui ordonne lensemble des informations. Les dates dob-
servations sont souvent equidistantes les unes des autres : on a des series mensuelles, trimestrielles,
etc, dans quel cas on peut les indexer par t N. Exemples : a) Nombre des moutons par annee
en Angleterre, entre 1867 et 2003. b) Nombre de voyageurs par mois (SNCF) entre 1990 et 2003. c)
Nombre de voitures vendues par un garage, par trim`estre entre 1995 et 1999. d) Taux de mortalite,
per age, entre 55 et 104 (cest le premier exemple dutilisation de splines, par Whittaker (1923)).
Les series temporelles sont le plus simple exemple dune thematique plus large : lestimation
et prevision des processus stochastique, i.e. des familles des variables aleatoires U(x). Pour les
series temporelles/chrologiques, on sinteresse en x N, Z ouR
+
, pendant que dans la statistique
spatiale, (par exemple en geostatistique) on sinteresse dans le cas x Z
d
ou x R
d
.
On se propose destimer la valeur de la variable U(x) en un point x quelconque connaissant
les valeurs U(x
i
) aux points de mesure donnes x
i
, pour i = 1, ...N. Le but principal est le choix
dun mod`ele (estimation) raisonable, qui permettra ` a partir des valeurs connues la prediction
des valeurs inobservables (comme les valeurs futures des series temporelles, ou moins accesibles
physiquement, couteuses, etc). On veut ` a la fois : a) enlever du bruit dobservation eventuel et b)
extrapoler du connu au inconnu.
Domaines dapplication :
Prospection et exploitation petroli`eres et mini`eres
Traitement du signal
Imagerie medicale
Oceanographie, meteorologie, hydrogeologie, environnement, ...
Series temporelles, appliquees en economie, nances, meteo, medecine, ...
2 Premier abord aux series temporelles/chroniques
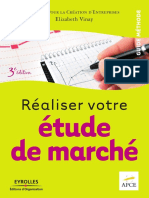
Une r`egle generale en statistique descriptive consiste ` a commencer par regarder ses donnees,
avant deectuer le moindre calcul. Ainsi, la gure 1 montre dierentes series chronologiques, qui
meritent quelques commentaires.
La consommation des menages en Allemagne et le Produit Interieur Brut en France semblent
avoir augmente reguli`erement.
Le taux de chomage en Allemagne semble avoir globalement augmente depuis 1960, mais
avec une alternance de baisses et de hausses soudaines. Le taux de chomage des Etats-Unis
ne semble pas evoluer globalement, mais presente egalement cette alternance de baisses et
de hausses.
Les ventes de champagnes, tout comme la production industrielle semblent exhiber un ca-
ract`ere periodique (ventes importantes de champagne en n dannee, baisse de la production
industrielle en ete, . . . ).
Dautre part, les variations de ces 2 series (indice de production industrielle et ventes de
champagne) ont une amplitude qui semble augmenter au cours du temps.
Toutes ces series ont un aspect irregulier. Ces uctuations irreguli`eres ont parfois une am-
plitude anormalement elevee (PIB et production industrielle en France au second trimestre
1968, consommation en Allemagne en 1991).
Cette liste de remarques nest bien s ure pas exhaustive. Elles traduisent simplement quelques
comportements que lon retrouve sur la plupart des series chronologiques. Puisque notre ambition
est de decrire et danalyser ce genre de chroniques, il nous faut donc proposer des mod`eles qui
int`egrent les dierentes caracteristiques que nous venons de relever.
3
2.1 Les composantes dune chronique
Dans un premier temps, lexamen graphique de la serie etudiee (y
i
, 1 i n) permet de
degager, lorsquon envisage une periode de temps susamment longue, un certain nombre de com-
posantes fondamentales de levolution de la grandeur etudiee.
1965 1970 1975 1980
60
80
100
120
140
160
Production Industrielle en France
1960 1970 1980 1990
1000
1500
2000
2500
3000
3500
4000
PIB de la France (en milliards de Francs 80)
1960 1970 1980 1990
0
500
1000
1500
2000
Consommation des mnages en Allemagne
62 63 64 65 66 67 68 69 70
0
5
10
15
Ventes de champagne en France
1960 1970 1980 1990
0
2
4
6
8
10
Taux de chomage en Allemagne
1960 1970 1980 1990
2
4
6
8
10
12
Taux de chomage aux EtatsUnis
Fig. 1 Quelques exemples de series chronologiques
Il faut alors analyser ces composantes, en les dissociant les unes des autres, cest-` a-dire en
considerant une serie comme resultant de la combinaison de dierentes composantes, tel que chacune
delles ait une evolution simple.
4
1. La tendance (f
i
, 1 i n) represente levolution ` a long terme de la grandeur etudiee, et
traduit laspect general de la serie. Cest une fonction monotone, souvent polynomiale.
2. Les variations saisonni`eres (s
i
, 1 i n) sont liees au rythme impose par les saisons
meteorologiques (production agricole, consommation de gaz, . . . ), ou encore par des acti-
vites economiques et sociales (fetes, vacances, solde, etc).
Mathematiquement, ce sont des fonctions periodiques, cest-` a-dire quil existe un entier p,
appele periode, tel que s
i
= s
i+p
pour tout i 1. Au premier abord, cette composante est
enti`erement determinee par ses p premi`eres valeurs s
1
, s
2
, . . . , s
p
. Mais on rencontre souvent
aussi des phenom`enes pour les quelles la p`eriode peut elle meme varier. On parle alors de
3. Cycles (c
i
, 1 i n), qui regroupent des variations ` a periode moins precise autour de la
tendance, par exemple les phases economiques dexpansion et de recession. Ces phases durent
generalement plusieurs annees, mais nont pas de duree xe. Sans informations speciques, il
est generalement tr`es dicile de dissocier la tendance du cycle. Dans le cadre de ce cours, la
composante appelee tendance regroupera pour la plupart du temps aussi les cycles.
4. Les uctuations irreguli`eres/residues/bruit (e
i
, 1 i n) sont des variations de faible in-
tensite et de courte duree, et de nature aleatoire (ce qui signie ici, dans un cadre purement
descriptif, quelles ne sont pas compl`etement expliquables). En eet, elles ne sont pas clai-
rement apercevables dans les graphiques, ` a cause de leur faible intensite par rapport aux
autres composantes. Elles aparaissent clairement seulement apr`es lenl`evement du signal ;
la question qui se posera alors sera : est-ce quils contiennent encore du signal, ou est-ce que
cest vraiment du bruit ?
5. Les variations accidentelles/observations aberrantes sont des valeurs isolees anormalement
elevees ou faibles de courte duree. Ces variations brusques de la serie sont generalement
explicables (Mai 68, reunication de lAllemagne, tempete, . . . ). La plupart du temps, ces
accidents sont integres dans la serie des bruits (les uctuations irreguli`eres).
6. Points de changement Ce sont des points o` u la serie change compl`etement dallure, par
exemple de tendance. Ils sont normalement explicables, et imposent une analyse separee de
la serie, par morceaux.
En resume, nous considererons une serie chronologique comme isue de la composition de 3
composantes :
(f
i
, 1 i n) la tendance (integrant eventuellement un cycle),
(s
j
, 1 j p) les coecients saisonniers,
(e
i
, 1 i n) les uctuations irreguli`eres (integrant eventuellement des accidents).
Exemple : Trouvez lelement suivant de la serie y
t
ci-dessous, une equation de recurrence
pour
y
t
= {1, 3, 7, 13, 21, 31, ...}
Obtenez une formule analytique pour y
t
, en utilisant :
a) la theorie des equations de recurrence ` a coecients constants. R : n
2
+n + 1
b) la m`ethode des fonctions generatrices, decomposition en fractions partielles et lexpansion
en serie des puissances :
1
(a z)
k
=
n=0
C
n+k1
k1
z
n
a
n+1
, |z| a
R : a(z) =
1+z
2
(1z)
3
=
2
(1z)
3
2
(1z)
2
+
1
(1z)
2.2 Quelques types de decomposition
Apr`es avoir detecte graphiquement quelles sont les composantes presentes, il faut proposer un
mod`ele :
5
2.2.1 le mod`ele additif
y
i
= f
i
+s
i
+e
i
, 1 i n. (1)
Pour bien separer la tendance de la composante saisonni`ere, et pour des raisons dunicite dans
la decomposition proposee, on impose que la somme des facteurs saisonniers soit nulle :
p
j=1
s
j
= 0.
Exemple : Imaginons que nous etudions la serie des temperatures moyennes relevees chaque
mois en un meme site, depuis janvier 1990, et que la tendance (plutot faible) a une allure lineaire.
Le mod`ele additif est :
y
i
= a +bi +
11
k=1
s
k
1
i
=k(mod12)
(
11
k=1
s
k
)1
i
=0(mod12)
+e
i
Les coecients a, b, s
1
, ..., s
11
et les residus peuvent etre determines en minimisant la somme
des carres des residus
i
e
2
i
, i.e. par regression.
Que peut-on dire des composantes presentes dans cet exemple ?
la serie (f
i
) represente la tendance generale (rechauement ? cycle ?).
Les donnees etant mensuelles, la periode est de un an, et donc p = 12.
Des valeurs s
1
= 10 et s
6
= +8 signient que le mois de janvier est plus froid de 10
par
rapport ` a lensemble de lannee, alors que juin est plus chaud de 8
.
Une uctuation irreguli`ere e
14
= 2 signie quil a fait 2
de moins que prevu pour un
mois de fevrier, en 1991 (cest-` a-dire ce que nous laissaient prevoir la tendance et leet
saisonnier pour fevrier 1991).
2.2.2 le mod`ele multiplicatif(*)
y
i
= f
i
(1 +s
i
)(1 +e
i
), 1 i n. (2)
L` a encore, on impose que la somme des facteurs saisonniers soit nulle :
p
j=1
s
j
= 0.
Dans ce mod`ele, on consid`ere maintenant que les amplitudes des uctuations dependent du
niveau. Considerons le nombre dentrees quotidiennes dans un cinema. Des valeurs s
4
= 0.5 et
s
6
= +0.8 signient ici que la frequentation de cette salle diminue de 50% le jeudi et augmente
de 80% le samedi (par rapport ` a lensemble de la semaine). Une valeur e
9
= +0.2 signie que le
nombre dentree du deuxi`eme mardi a ete de 20% superieur au chire attendu pour ce jour l` a.
Remarque : Le mod`ele multiplicatif est generalement utilise pour des donnees de type economique.
2.2.3 les mod`eles mixtes(*)
Il sagit l` a des mod`eles o` u addition et multiplication sont utilisees. On peut supposer, par
exemple, que la composante saisonni`ere agit de fa con multiplicative, alors que les uctuations
irreguli`eres sont additives :
y
i
= f
i
(1 +s
i
) +e
i
, 1 i n. (3)
(toutes les autres combinaisons sont egalement possibles . . . ).
La modelisation stochastique des series temporelles commence en observant leur graphique
et en cherchant une decomposition additive ou multiplicative. Nous etudierons en suite le mod`ele
additif (le mod`ele multiplicatif revient ` a un mod`ele additif pour le log des donnees).
Une fois un mod`ele est obtenue, il peut etre utilise pour la prediction des valeurs futurs.
6
3 Filtres/moyennes mobiles
Souvent il semble une bonne idee de baser les predictions sur linformation locale fournie par
les voisins, ce qui sugg`ere de construire des moyennes mobiles.
Denition 3.1 La serie Y
t
sapelle une moyenne mobile de X
t
ou ltre si
Y
t
=
k
2
i=k
1
i
X
ti
(4)
o` u k
1
, k
2
0. Lordre du ltre est k = k
1
+k
2
+ 1.
Le cas des
i
` a somme egale ` a 1 sappelle lissage, celui avec des
i
egaux sappelle moyenne
arithmetique, et le cas dune moyenne arithmetique avec k
1
= k
2
= q sera apelle moyenne
arithmetique symmetrique ou centre.
Exemples : ltres arithmetiques, causaux, ...
Il est convenable dintroduire un operateur de retard B (ou encore de retro-decalage)
deni sur lensemble des suites par
BX
t
= X
t1
donc B
i
X
t
= X
ti
, et nalement
k
2
i=k
1
i
X
ti
= (B)X
t
o` u (B) denote le polyn ome
k
2
i=k
1
i
B
i
. La notation des polyn omes de retard ram`ene (4) ` a la
forme :
Y
t
= (B)X
t
et les equations de recurrence
k
2
i=k
1
i
X
ti
= 0 ` a la forme :
(B)X
t
= 0
Exemples et applications dans la theorie des recurrences ` a coecients constants ...
(B) est appele operateur de dierences (sur lespace des series). La serie de Laurent
associe (z) =
k
2
i=k
1
i
z
i
sera appelee le symbole de loperateur.
Denition 3.2 Le symbole dun ltre (B) est la fonction (z) : C > C.
Nous travaillerons surtout avec des ltres causaux
(B) =
k
i=0
i
B
i
o` u k pt etre aussi . Dans ce cas, les coecients du ltre seront denotes surtout par
i
, et le
symb ole par (z).
3.1 Fonctions generatrices
Un fait tr`es important est que la fonction generatrice
y(z) =
t=0
Y
t
z
t
dune serie denie par un ltre causal Y
t
= (B)X
t
est essentiellement le produit de x(z) =
t=0
X
t
z
t
, la fonction generatrice de X
t
et du symbole (z). Plus precisement, denotons par
m
(z) =:
m
i=0
i
z
i
la troncation de nimporte quelle serie des puissances au premiers termes.
7
Theor`eme 3.1 Pour chaque ltre causal dordre ni, on a :
y(z) y
k1
(z) = (z)x(z)
k1
i=0
(X
i
z
i
)
k1i
(z)
o` u k est lordre du ltre.
Demonstration : Nous allons verier formellement
1
le cas particulier k = 2 des ltres
quadratiques
0
+
1
B +
2
B
2
, quand ce theor`eme devient :
y(z) Y
0
Y
1
z = (z)x(z) X
0
(
0
+
1
z) (X
1
z)
0
Remarques : 1) Ce theor`eme est un exemple de la fameuse methode des fonctions generatrices
de Laplace, qui transforme les recurrences en des equations algebriques pour les fonctions generatrices !
2) Pour les series Y
t
, X
t
doublement innies, i.e. avec t Z, le resultat est plus simple
y(z) = (z)x(z) (5)
car on peut remplacer 0, 1 par un point arbitraire de depart k 1, k et ensuite on fait k tendre
vers .
3) Pour les series Y
t
, X
t
doublement innies, on peut inverser formellement cette relation,
obtenant X
t
` a partir de Y
t
:
x(z) =
y(z)
(z)
Mais, le travail avec les series Y
t
, X
t
doublement innies contient des pi`eges quon discutera plus
tard. De lautre cote, travailler avec des series indicees par t N nous force ` a denir legalite dune
serie comme egalite des composantes, ` a partir dun certain point, i.e.
A = B KN tel que A
n
= B
n
, n K
Cest facile de verier que les operations de ltrage commutent :
Theor`eme 3.2 Soit
1
(B),
2
(B) deux ltres et posons (B) =
1
(B)
2
(B). Alors :
1
(B)
2
(B)X
t
=
2
(B)
1
(B)X
t
= (B)X
t
Remarque : Lapproche de decomposition additive demande de rompre une serie donnee
Y
t
= m
t
+
t
dans un signal m
t
et du bruit
t
. Il est naturel dessaier de depister le signal par
un ltre de lissage causal l(B), donc m
t
= l(B)Y
t
, tq ce ltre detruit le bruit mais laisse passer le
signal. Il en suit que le bruit aussi est donne par un ltre causal
t
= Y
t
m
t
= (I l(B))Y
t
:= (B)Y
t
o` u (B) detruit le signal mais laisse passer le bruit.
On peut voir donc lanalyse des series temporellescomme la recherche pour un ltre qui trans-
formera notre serie en bruit. Pour cela, il va etre important de denir des tests pour decider quand
une serie est un bruit. Nous allons examiner plus tard des statistiques comme les correlations,
correlations partielles, le periodogramme, etc., issues de la modelisation probabiliste des series
temporelles.
Pour linstant, les prochains paragraphs nous donnent quelques outils pour juger le compor-
tement des ltres appliques au series deterministes.
1
en ignorant la convergence des series ; cet aspect nest pas foncier, car on peut justier algebriquement meme des
manipulations avec series ` a rayon de convergence 0.
8
3.2 Filtres de lissage
Un ltre de lissage (` a
i
= 1)
Y
t
=
k
i=1
i
X
ti
:=
X
t
peut etre utilise pour la prediction de X
t
. Remarquez que le fait que la prediction est non-biaisee
pour les series stationnaires, i.e. :
E
X
t
= E
k
i=1
i
X
ti
= (
k
i=1
i
)EX
1
est assure par la condition
k
i=1
i
= 1.
Cette condition assure aussi quune serie egale ` a 1 sera predite exactement, i.e. (B)1 = 1,
et en fait chaque serie constante X
t
= k sera predite exactement :
(B)k = k ((B)1) = k 1 = k
La verication est tr`es facile pour ca, remarquons que
Il est possible en fait, en choisissant les coecients
i
dun ltre, dassurer quil laisse inva-
riantes toutes les series polynomiales p
t
dun degre donne.
Exercice 3.1 a) Montrez quune moyenne arithmetique symmetrique dordre 2q + 1 = 3, donne
par
(B) =
1
3
(1 +B +B
1
)
conserve (laisse invariantes) les tendances lineaires p
t
= a +bt. b) Generaliser pour q quelconque.
Nous verrons maintenant un resultat desirable de lapplication des ltres de lissage : la reduc-
tion de la variance des observations.
Exercice 3.2 Montrez quune moyenne arithmetique symmetrique dordre 2q + 1 diminue la va-
riance
2
dun bruit blanc (=serie i.i.d. de moyenne 0) par 2q + 1.
En conclusion, si la serie observee est de la forme
X
t
= p
t
+
t
o` u p
t
= a + bt est une tendance lineaire, que loperation de prendre une moyenne arithmetique
symmetrique dorder q naecte pas la tendance, i.e. (B) p
t
= p
t
, mais a un eet de diminution
du bruit stochastique
t
, ramenant ` a :
X
t
= (B)(p
t
+
t
) = p
t
+ ((B)
t
) = p
t
+
t+q
+... +
t
+... +
tq
2q + 1
:= p
t
+
t
avec un nouveau bruit e
t
=
t+q
+...+t+...+
tq
2q+1
de variance inferieure ` a celle de e
t
.
Donc, si on constate une tendance lineaire dans le comportement dune chronique dans
un voisinage, on peut estimer la tendance dans ce voisinage en prenant des moyennes mobiles
arithmetiques symmetriques, car ca va reduire (attenuer) le bruit et mettre en evidence la tendance
lineaire. Leet du lissage augmente en augmentant q.
Exercice 3.3 Montrez que la droite obtenue en lissant 2q + 2 observations avec des moyennes
mobiles arithmetiques symmetriques dordre 2q + 1 est :
y
2q+1
i=1
X
i
2q + 1
= (x (q + 1))
X
2q+2
X
1
2q + 1
9
Le theor`eme suivant nous donne un crit`ere pour identier le degre maximal des polynomes
laisses invariants par un ltre (B) ; autrement dit, de determiner le degre maximal des polynomes
inclus dans lespace invariant des series Z
t
satisfaisant (B)Z
t
= Z
t
:
Theor`eme 3.3 Lespace invariant dun ltre contient les polyn omes de degre p ssi 1 est une
racine dordre au moins p +1 de lequation (z) = 1, i.e. (1) = 1,
(1) = 0,
(1) = 0,
(p)
(1) = 0.
Exercice 3.4 Demontrez le theor`eme pour p = 0, 1
Outre lexploration de lespace invariant dun ltre, une autre question importante est celle
de lexploration du noyau, i.e. lespace des series Z
t
satisfaisant (B)Z
t
= 0. Cette question a une
portee pratique pour lenl`evement de composantes saisoni`eres (et leur determination).
3.3 Filtres qui enl`event les composantes saisoni`eres
Denition 3.3 a) Une serie s
t
sera appelee periodique de periode p ssi
s
t+p
= s
t
(1 B
p
)s
t
= 0, t (6)
b) Une serie s
t
sera appelee saisonni`ere de periode p ssi
p
i=1
s
t+i
= 0 (
p1
i=0
B
i
)s
t
= 0, t (7)
Exercice 3.5 Montrez quun ltre (z) qui est divisible par 1 + z + ... + z
p1
, i.e. de la forme
(z) = (1 +z +... +z
p1
)
1
(z), enl`eve les composantes saisonni`eres de periode p, i.e. :
(B)s(t) = 0 t
pour chaque serie s
t
satisfaisant (7).
En eet, la reciproque est aussi vraie (admis) :
Theor`eme 3.4 Un ltre (B) annule (ou enl`eve) les composantes saisonni`eres dordre p ssi son
symbole (z) est divisible par 1 + z + ... +z
p1
(donc si (z) = 0, pour toutes les racine dordre p
de lunite, sauf z = 1.
Exemples : Pour enlever les composantes saisonni`eres dordre 4, on peut utiliser donc la
moyenne mobile arithmetique dordre 4, pour une periodicite mensuelle on peut utiliser la moyenne
mobile arithmetique dordre 12, etc... En general, en utilisant un ltre arithmetique dordre p on
peut enlever la partie saisonni`ere de cet ordre, pour mieux deceler ensuite la tendance.
Alternativement, apr`es le choix dune forme appropriee pour la tendance et une p`eriode spe-
cique, selon le graphe, on peut determiner au meme temps les coecients de la tendance et de la
partie periodique par une regression lineaire.
Exercice 3.6 Montrez que le ltre
1
9
(B
2
+4B+3+4B
1
B
2
) laisse invariants les polyn omes
de troisi`eme degre, et enl`eve les composantes saisonni`eres dordre 3.
10
3.4 Exercices : TD 1
1. Trouvez lelement suivant des series y
t
ci-dessous, ainsi que des equations de recurrences
quelles satisfont et leurs solutions analytiques :
2, 6, 12, 20, 30, 42, ... (8)
4, 10, 20, 36, 62, 104, ... (9)
3, 2, 1, 6, 3, 2, 1, ... (10)
0, 1, 2, 3, 0, 1, 2, ... (11)
Indication. a), b) Calculez les series dierenciees : z
t
= y
t
= y
t
y
t1
. La deuxi`eme serie
admet deux continuations naturelles (au moins).
2. Une serie verie la recurrence y
t
2y
t1
+y
t2
= (1)
t1
, t 2, y
0
= 1, y
1
= 3 Obtenez une
formule analytique pour y
t
, en utilisant : la m`ethode des fonctions generatrices, decomposition
en fractions partielles et lexpansion en serie des puissances :
1
(a z)
k
=
n=0
C
n+k1
k1
z
n
a
n+1
, |z| a
R : a(z) =
1+2z
(1+z)(1z)
2
=
3
2(1z)
2
1/4
(1z)
1/4
(1+z)
, a(n) = (5 (1)
n
+ 6n)/4
3. (a) Montrez que le ltre P(B) =
1
3
(2+B+B
2
B
3
) enl`eve les composantes saisonni`eres de
periode 3, i.e. quil transforme chaque fonction de periode 3 dans une fonction constante.
(b) Trouvez lordre de la tendance polyn omiale maximale conservee (laissee invariante) par
ce ltre.
Sol : Ordre 1.
4. Trouver un ltre 1 +B +B
2
+B
3
qui laisse passer un tendance ane sans distortion et
elimine les periodicites dordre 2. Indication : Trouver un syst`eme des 2 + 1 = 3 equations et
r`esoudre.
5. Trouvez un ltre f(B) qui conserve les polyn omes de degre 1, et qui enl`eve les composantes
saisonni`eres dordre 4, et deduisez que pour une serie ayant une composante periodique dordre
4 et une tendance lineaire m
t
, la tendance est donne par m
t
= f(B)Y
t
.
Sol :
1+B+B
2
+B
3
4
53B
2
6. a) Montrez qune serie saisonni`ere est periodique, et que chaque serie periodique p
t
est la
somme dune serie saisonni`ere et dune serie constante.
b) Trouvez une base de lespace vectorielle des series periodiques dordre p.
c) Trouvez une base de lespace vectorielle des series saisonni`eres dordre p, et ensuite une
base des series periodiques qui la contient.
7. On consid`ere la serie suivante :
t
i
1 2 3 4 5 6 7 8 9 10
y
i
58 40 31 15 18 15 9 9 10 8
a) Representer graphiquement cette serie.
b) On se propose dajuster une tendance f de la forme f(t) =
1
a +bt
. Justier ce choix.
c) Determiner les coecients a et b, en utilisant un changement de variable approprie :
- par la methode des 2 points (en choisissant judicieusement les 2 points)
- par la regression lineaire.
d) representer les 2 tendances ainsi obtenues sur le graphique precedent et comparer les
resultats. Est-ce que les residus ont une allure irreguli`ere ?
8. Pour chacune des quatre series suivantes,
11
5 10 15 20
5
10
15
20
25
(a)
5 10 15 20
0
5
10
15
(b)
5 10 15 20
0
0.5
1
1.5
2
2.5
(c)
5 10 15 20
0
5
10
15
20
(d)
a) ecrire le mod`ele qui vous semble convenir, en precisant le type du mod`ele (par defaut
additif), la tendance et la periode
b) Exprimez le mod`ele choisi sous la forme dune equation vectorielle lineaire dans les pa-
ram`etres inconnues, et donnez la formule de la regression qui permet ` a determiner ces
param`etres.
9. On consid`ere la serie suivante
t
i
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
y
i
7.5 4.4 3.3 7.6 3.9 2.4 6.9 4.5 2.7 8.2 4.1 3.0 7.5 3.5 2.8
a) Representer graphiquement cette serie.
b) Quel mod`ele proposeriez-vous pour cette serie (justier) ?
c) Calculer les facteurs saisonniers (s
j
, 1 j p) ainsi que leur moyenne p
1
p
j=1
s
j
, en
supposant une tendance constante m
t
= a.
d) En notant (e
i
, 1 i n) la serie des uctuations irreguli`eres, calculer e
1
, e
2
et e
3
.
e) Proposer une m`ethode pour lestimation des param`etres, en supposant cette fois une ten-
dance lineaire m
t
= at +b. Implementez le calcul en utilisant un logiciel. Proposez un teste
pour choisir entre les deux mod`eles.
10. On consid`ere un mod`ele simple o` u la tendance est une constante (f(t) = a).
a) On consid`ere tout dabord le mod`ele sans composante saisonni`ere. Comment choisir a si le
mod`ele est additif ? que peut-on alors dire sur les uctuations irreguli`eres ? que se passe-t-il
si le mod`ele est multiplicatif ?
b) On consid`ere maintenant quune composante saisonni`ere (s
j
, 1 j p) est presente.
On suppose que le nombre dobservations n est un nombre entier L de periodes : n = Lp.
Comment choisir a et (s
j
) si le mod`ele est additif ? que peut-on alors dire sur les uctuations
irreguli`eres ? que se passe-t-il si le mod`ele est multiplicatif ?
c)* Reprendre la question b) lorsque le nombre dobservations nest pas un nombre entier de
periodes : n = Lp +m.
11. On consid`ere une serie (y
i
, 1 i n) periodique, de periode p. On suppose que le nombre
dobservations n est un multiple de p : n = Lp. Montrer alors que les correlations suivantes
sont :
(p) =
L 1
L
; (2p) =
L 2
L
; . . . ; (jp) =
L j
L
. . .
12
4 Modelisation stochastique des series temporelles
4.1 Introduction
Rappelons le mod`ele additif sans saisonnalite, qui cherche une decomposition de la forme :
Y
t
= m
t
+
t
o` u :
m
t
represente la tendance (intuitivement un mouvement lisse ` a long terme), qui sera
la composante la plus importante dans la prevision.
t
= Y
t
m
t
sont les residus qui restent apr`es quon enl`eve la partie structuree m
t
. Elles
representent des irregularites/uctuations imprevisibles, qui au debut semblent inutili-
sables (` a ignorer) pour la prevision (cest correct du point de vue de la prevision ponctuelle,
mais elles nous servirons quand-meme dans la calcul des intervals de conance).
On sarrangera toujours tel que les residus ont la moyenne 0, mais ca nest pas susant
pour quils soient un bruit totalement sans structure=bruit blanc (et sil y a encore une partie
structure, elle devrait etre inclue en m
t
).
Le bruit blanc est notre premier exemple dun processus stochastique : une formalisation du
concept de series temporelles, ayant des proprietes bien denies (voir prochaine chapitre). Inspires
par les proprietes de ce processus, on proposera des tests statistiques correspondant ` a ce mod`ele,
qui nous permetrons de decider si
t
ont les proprietes de manque de structure desirees.
Pour tendance, plusieurs mod`eles se sont averes utiles :
1. regression sur des predicteurs exog`enes (covariates), implemente en logiciels comme R par
formules :
m
t
X
(1)
t
+X
(2)
t
+...
2. mod`eles de superposition des chocs exterieurs/moyennes mobiles/FIR inobservables
t
:
m
t
=
q
i=1
ti
3. mod`eles autoregressifs :
Y
t
= f(Y
t1
, Y
t2
, ...) +
t
Dans le manque des predicteurs exog`enes, il est assez naturel dadopter une modelisation au-
toregressive pour la tendance. Sous certaines conditions de regularite, ca ramenera ` a des previsions
autoregressives un pas en avant :
Y
t
= f(Y
t1
, Y
t2
, ...)
2
Le mod`ele le plus simple est le processus AR(1) :
Y
t
= Y
t1
+b +
t
Ce mod`ele est recomandable si on envisage une prevision
Y
t
= Y
t1
+b (
Y
t
a) = (Y
t1
a)
o` u b = a(1 ).
On verie que si la moyenne de Y
t
est 0 on a a = b = 0 ; pour simplier, on supposera
normalement quon a deja enleve la moyenne de Y
t
.
2
La modelisation autoregressive permetra aussi des predictions k pas en avant :
Y
t+k
= f
k
(Yt, Yt1, Yt2, ...), k = 1, 2, ...
Les valeurs (positives) de k correspondent au futur et doivent etre extrapolees/prevues.La fonction de prevision f
k
represente une projection de Y
t+k
sur lespace engendre par Yt, Yt1, Yt2, .... Plusieurs : choix sont possibles par
exemple extrapolation ` a partir dun ajustement/interpolation polynomiale ou par splines.
13
Pour utiliser ce mod`ele, on estimer le param`etre par une regression lineaire des points
(Y
t1
, Y
t1
), t = 2, ..., T
Le fait davoir enleve la moyenne ram`ene ` a une droite passant par lorigine y = x.
En suite, on utilise la valeur trouve pour resoudre lequation. On trouve
Y
t
=
t1
i=0
ti
+
t
Y
0
et examiner solution stationnaire unique ssi : | |< 1.
Indication : vous pouvez le faire en calculant la solution (i) par des substitutions repetees ou
(ii) en utilisant des operateurs, en posant Y
t
= (1 B)
1
t
, et en developpant la fraction comme
une serie de puissances en B. En suite, calculez les covariances, pour montrer la stationnarite.
b) Montrez que lequation : (20) a une solution stationnaire unique, qui depend seulement du
bruit futur ssi : | |> 1.
En conclusion
1. pour | |< 1, lequation : (20) a une solution stationnaire unique causale, qui depend seule-
ment du bruit passe.
2. pour | |> 1, lequation : (20) a une solution stationnaire unique, qui depend seulement du
bruit futur.
Pour tester la validite des mod`eles, proposes, il faut dabord preciser rigourousement les pro-
prietes desirees des residus ou des chocs en tant que processus stochastiques ; en plus, les mod`eles
seront utiles seulement si on peut verier leur stationarite, i.e une certaine uniformite de struc-
ture par rapport au temps. C a nous ramene a considerer les processus stochastiques stationnaires,
les distributions jointes de quelles ne varient pas avec le temps.
4.2 Processus stochastiques stationnaires
Denition 4.1 Soit X un processus aleatoire indexe par T = N ou Z. On dit que X est station-
naire (strict) si pour toute famille nie dinstants t
1
. . . t
r
T et tout entier s, les lois jointes de
(X
t
1
. . . X
tr
) et de (X
t
1
+s
. . . X
tr+s
) sont les memes.
Denition 4.2 Soit X un processus aleatoire indexe par T = N ou Z. On dit que X est station-
naire ` a lordre 2 si la moyenne m(t) et la covariance (s, t) sont invariantes par translation dans
le temps, i.e. si la moyenne est constante :
EX
t
= m
t
= m, t
et si la covariance/correlation depend seulement de lecart de temps k = t s, i.e. il existe une
fonction dune variable (k), paire, telle que :
Cov (X
t
, X
s
) = C(t, s) = (t s) = (k), k = 2, 1, 0, 1, 2, 3, ..
Comme la plupart de series nest observable quune seule fois, lutilite du concept de dis-
tributions et covariances theoriques nest pas evidente pour les applications. Par contre, on peut
toujours calculer des distributions et covariances empiriques, et sous lhypothese de stationnairite,
les moyennes empiriques convergent vers les theoriques.
Theor`eme 4.1 Pour un processus stationnaire, les covariances empiriques
n
(k) = (n k)
1
nk
t=1
(X
t
m
n
)(X
t+k
m
n
)
estimees ` a partir de n observations convergent vers les covariances theoriques quand n .
14
Dici limportance du concept de stationarite, qui justie lestimation des mod`eles statistiques
observables une seule fois (le cas souvent dans les series temprelles et la geostatistique !) : ceci est
faisable ssi on a la chance davoir ` a faire avec un processus stationnaire.
Remarques :
1. La plupart des series ne sont pas stationnaires, mais on peut essayer quand-meme de se
ramener ` a ce cas par des transformations (logarithmes, Box-Cox, etc).
2. Pour un processus du second ordre, la stationnarite stricte implique la stationnarite au sens
large (` a lordre 2). La reciproque est fausse. Une suite Y de v.a. independantes de meme
moyenne et meme variance est toujours stationnaire ` a lordre 2 ; mais si les Y
n
nont pas tous
la meme loi, Y nest pas stationnaire au sens strict.
3. (*) La stationnarite ` a lordre 2 est bien plus facile ` a etudier et verier que la stationnarite
stricte. Son importance pratique tient surtout aux probl`emes de prediction ou de regression.
En eet, on se limite souvent ` a des crit`eres de moindres carres pour avoir des estimateurs
calculables. Cela signie alors utiliser des predicteurs lineaires optimaux dont le calcul ne
fait pas intervenir dans sa totalite la structure probabiliste du processus X observe, mais
seulement la geometrie (angles et longueurs) de la suite (X
k
) consideree comme suite de
vecteurs dans lespace de Hilbert L
2
(, P). Or, cette geometrie ne depend que des moments
dordre 2 de X ; la notion naturelle de stationnarite est donc linvariance de ces moments
dordre 2 par translation dans le temps.
4.3 Exemples des processus stationnaires
Lidealisation probabiliste de la propriete que les residus sont completement irreguliers, ne
retennant aucune structure, est le bruit blanc stationnaire.
Un deuxieme exemple important des processus stationnaires non-blancs sont les processus
lineaires MA() Y
t
=
i=0
ti
avec
t
bruit blanc et leur cas particulier avec un nombre
ni des coecients
i
nonnuls, les moyennes mobiles MA(q).
Le troisi`eme exemple etudie seront les processus autoregresifs AR()
t
=
i=0
i
Y
ti
avec
t
bruit blanc et leur cas particulier avec un nombre ni des coecients
i
nonnuls, les processus
AR(p).
4.3.1 Le bruit blanc
Lexemple le plus simple de mod`ele stochastique est le bruit blanc discret, la structure revee
des residus qui restent apres quon enl`eve la tendance/moyenne dun processus.
Denition 4.3 Un processus
t
, t T , o` u T est un ensemble denombrable quelconque, est appele
bruit blanc stationnaire si les variables
t
sont i.i.d. (independents et identiquement distribues)
` a esperance E
t
= 0. Il sera appele bruit blanc Gaussien si la distribution de chaque v.a.
t
est
Gaussiennes.
Un bruit blanc a la covariance
(s, t) = E[
s
t
] = 0, s = t et donc le coecient de correlation (12)
(s, t) =
(s, t)
s
t
= (s t) (13)
o` u (s t) est le symb ole du Kronecker).
Comme les tests dindependance et Gaussianite demandent beaucoup de donnees, qui ne sont
pas toujours disponibles, il faut faire parfois avec un ideale probabiliste moins structure : le bruit
blanc de second ordre deni par les deux derni`eres formules equivalentes (12), (13).
15
Denition 4.4 Un processus
t
, t N ou t Z est appele bruit blanc de second ordre sil a la
moyenne 0, la variance constante E
2
t
=
2
et une covariance (s, t) = E[
s
t
] = 0, s = t (et donc
les coecients de correlation (s, t) = (s t)).
Notes :
1. Le bruit blanc Gaussien est une structure probabiliste tr`es naturelle, car la distribution Gaus-
sienne pos`ede plusieurs proprietes importantes, comme celle detre invariante par rapport aux
rotations, ce qui est evidemment une requise pour un bruit aleatoire.
2. Le bruit blanc stationnaire est une idealisation du processus des residus de la regression
lineaire, quon aimerait independents. Mais, comme lindependence est un concept proba-
biliste, et les residus sont le resultat determinist dune regression aplique a une serie observee
une seule fois, il est dicile de la verier rigoureusemment. Parmi les tests possibles, men-
tionnont celui de turning points, qui demande de verier que la frequence de ces points est
environ 4/6, et le teste qui verie si la somme des correlations empiriques est proche de 0. Si
ces deux testes sont positives, on sait au moins quon ne peut pas repousser lhypoth`ese de
lindependence. Il y aussi des tests distributionels des residus comme Fisher, Student, qui
testent la Gaussianite.
3. Quand les tests des donnees rejettent lhypoth`ese du bruit blanc, i.e. quand on a du bruit
correle, la regression classique doit etre remplace par une analyse plus ne, appellee krigeage
en geostatistique.
4.3.2 Les processus lineaires et les moyennes mobiles MA(q)
Denition 4.5 Un processus Y
t
sera appele lineaire en
t
sil peut etre represente dans la forme :
Y
t
=
i=
ti
avec
2
i
< (14)
o` u
t
est un bruit blanc.
Evidemment, du point de vue pratique (pour la prediction), on ne sinteresse que dans le cas
qui sera appele causal quand la representation nutilise pas le bruit du futur :
Denition 4.6 Un processus lineaire Y
t
sappelle causal sil peut etre represente dans la forme :
Y
t
=
i=0
ti
(15)
o` u
t
est un bruit blanc et
2
i
<
Denition 4.7 On appelle processus MA(q) un processus lineaire Z
t
, t Z veriant une relation :
Z
t
=
q
i=0
ti
, t Z (16)
o` u
t
est un bruit blanc de variance
2
et
0
= 1.
La notation des polyn omes de retard ram`ene (16) ` a la forme :
Z
t
= (B)
t
16
Theor`eme 4.2 Un processus lineaire
Y
t
=
i=
ti
o` u
2
i
< est : a) bien deni dans L
2
(i.e. Var Y
t
< ),
b) ` a variance constante stationnaire Var Y
t
=
2
i=
2
i
c) ` a autocovariance donnee par :
(t, t +k) =
2
i=
i+k
< (17)
d) stationnaire ` a ordre deux.
Demonstration : a) En considerant Var(Y
t
), on voit que la condition est necessaire et susante
pour convergence. b),c),d) En suite, on voit quelle sut pour la stationnarite, car elle assure que
Cov(Y
t
, Y
t+k
) est bien denie par linegalite de Cauchy-Schwartz (qui est equivalente ` a |
k
| 1)
et ne depend pas de t.
Exercice 4.1 1. Calculer la fonction dautocovariance (k) dun processus MA(1).
2. Calculer la fonction de covariance (k) dun processus MA(q)
Le fait que les fonctions de covariance et correlation (k), respectivement (k) dun processus
MA(q) sannulent pour k > q permet de reconnaitre des series qui peuvent etre modelisees comme
MA(q). Plus precisement, pour accepter lhypoth`ese quune serie est MA(q) pour un q donne, on
verie que toutes les correlations pour k > q satisfont
|
n
(k)| z
q
o` u
2
q
=
1 + 2( (1)
2
+ (2)
2
+... + (q)
2
)
n
(formule de Bartlett) et z
, la fractile dordre de la distribution Gaussienne, depend du niveau
de conance desire (par exemple, z
.95
= 2). Donc, si toutes les correlations pour k > q sont ` a
linterieur de cette bande de conance, on accepte lhypoth`ese que la serie est MA(q).
4.3.3 Les mod`eles autoregressifs AR(p)
La prediction dune serie est particuli`erement simple quand elle peut etre bien approximee
par un mod`ele autoregressif parametrique :
Y
t
= f(Y
t1
, Y
t2
, ...) +
t
(18)
Dans ce cas il sav`ere typiquement que la formule de prevision ponctuelle pour Y
t
un pas en
avant est simplement :
Y
t
= f(Y
t1
, Y
t2
, ...)
Nous allons considerer ici surtout des mod`eles autoregressifs lineaires (o` u f est une fonction
lineaire) AR(p) :
Denition 4.8 Un processus stationnaire Y
t
, t Z sera appelle processus autoregressif li-
neaire dordre p : AR(p) sil existe un bruit blanc
t
et des reels
i
, i = 1, ..., p tels quune
relation de recurrence :
Y
t
=
p
i=1
i
Y
ti
+
t
, t Z (19)
est veriee.
17
La notation des polyn omes de retard ram`ene (19) ` a la forme :
(B)Y
t
=
t
o` u (B) = 1
p
i=1
i
B
i
Denition 4.9 Le polyn ome
(B) = 1
p
i=1
i
B
i
sera appelle polyn ome charact`eristique, ou symb ole du mod`ele (19).
Rq : Les processus autoregressifs sont denis par une equation, qui ` a priori, peut ne pas avoir
des solutions ; comme solution de lequation (19) nous aimerions avoir une representation du
processus Y
t
par rapport au processus
t
.
Nous verrons maintenant que le processus (Markovien) AR(1) Y
t
= Y
t1
+
t
a une representation
MA() ssi || = 1 et cette representation est causale ssi || < 1. Elle sera obtenue a) en resolvant
la recurrence ou b) par linversion formelle du polyn ome (B) = 1 B.
Exercice 4.2 processus AR(1). a) Montrez que lequation :
Y
t
= Y
t1
+
t
(20)
a une solution stationnaire unique, qui depend seulement du bruit present et passe, etant donc
causale, ssi : | |< 1.
Indication : vous pouvez le faire en calculant la solution (i) par des substitutions repetees ou
(ii) en utilisant des operateurs, en posant Y
t
= (1 B)
1
t
, et en developpant la fraction comme
une serie de puissances en B. En suite, calculez les covariances, pour montrer la stationnarite.
b) Montrez que lequation : (20) a une solution stationnaire unique, qui depend seulement du
bruit futur ssi : | |> 1.
En conclusion
1. pour | |< 1, lequation : (20) a une solution stationnaire unique causale, qui depend seule-
ment du bruit passe. On verie alors que
t
est un bruit dinnovation.
2. pour | |> 1, lequation : (20) a une solution stationnaire unique, qui depend seulement du
bruit futur. On verie alors que
t
nest pas un bruit dinnovation.
3. pour le cas | |= 1, lequation : (20) (appellee marche aleatoire) na pas de solution sta-
tionnaire. Par contre, les increments Y
t
Y
t1
=
t
sont stationnaires ; cette situation plus
compliquee sera analyse dans le chapitre sur les processus ARIMA(p,d,q).
En conclusion, on a une representation causale MA() (en termes du bruit passe) du pro-
cessus AR(1) ssi le polyn ome characteristique (z) = 1 z a sa racine ` a lexterieur du cercle
unitaire |z| 1.
Exercice 4.3 Montrez que si un processus AR(2) Y
t
=
1
Y
t1
+
2
Y
t2
+
t
a une representation
stationnaire causale
Y
t
=
i=0
ti
alors les coecients
i
satisfont la recursion Yule-Walker
t
=
1
t1
+
2
t2
, t 2
(0) = 1, (1) =
1
18
Exercice 4.4 Montrez que la formule des coecients
j
de la representation MA() dun pro-
cessus AR(2) Y
t
=
1
Y
t1
+
2
Y
t2
+
t
, en fonction des racines de lequation characteristique
de la recurrence Yule-Walker
0 =
2
1
2
=
2
(
1
)
est :
(k) =
_
k+1
1
k+1
2
2
if
1
=
2
(k + 1)
k
if
1
=
2
=
Montrez que si lequation characteristique a ses racines
1
,
2
dedans le cercle unitaire || < 1
(et donc le symb ole 1
1
z
2
z
2
a ses racines z
1
, z
2
dehors le cercle unitaire |z| < 1), alors la
condition
2
i
,
qui assure la convergence des representations MA(), est satisfaite.
Donnez les coecients
j
dans les cas particuliers :
a) Y
t
1
2
Y
t1
3
16
Y
t2
=
t
b) (1 B +
B
2
4
)Y
t
=
t
Indication : La solution generale de la recurrence dordre 2 (k) =
1
(k 1) +
2
(k 2),
pour valeurs initiales arbitraires (0) = x
0
, (1) = x
1
est :
1. avec des racines distinctes
1
,
2
:
(k) =
k
1
k
2
2
x
1
(
k
1
k
2
1
)
2
x
0
2. avec des racines confondues
1
=
2
= :
(k) = x
0
k
+ (x
1
x
0
)k
k1
Remarquons que les processus AR(1) et AR(2) ont une representation MA() avec coecients
qui satisfont
2
i
ssi lequation 0 = (z) a ses racines z
1
, z
2
dehors le cercle unitaire |z| 1
(ou si lequation characteristique a ses racines
1
,
2
dedans le cercle unitaire |z| < 1). Il sav`ere
que cette situation est typique pour tous les mod`eles AR(p).
4.3.4 Les mod`eles ARMA(p,q)
Denition 4.10 On appelle processus ARMA(p,q) un processus stationnaire Y
t
, t Z veriant
une relation de recurrence :
Y
t
=
p
i=1
i
Y
ti
+
q
i=0
ti
, t Z (21)
o` u les
i
,
i
sont des reels et
t
est un bruit blanc de variance
2
.
La notation des polyn omes de retard ram`ene (22) ` a la forme :
(B)Y
t
= (B)
t
(22)
Nous verrons dessous que les processus ARMA(p,q) avec des polyn omes characteristiques
(B), (B) ` a racines dehors le circle unitaire ont deux autres representations equivalentes :
1. MA(), de Y
t
en termes de
t
(appelee aussi representation lineaire causale), et
2. AR(), de
t
en termes de Y
t
(appelee aussi representation inverse).
19
Ces representations peuvent etre obtenues par des inversions formelles de lequation (22), suivies
par un development de la fraction correspondante dans une serie des puissances :
Y
t
=
(B)
(B)
t
= (
i=0
i
B
i
)
t
=
i=0
ti
,
t
=
(B)
(B)
Y
t
= (
i=0
i
B
i
)Y
t
=
i=0
i
Y
ti
On peut aussi formuler ces representations en utilisant les fonctions generatrices des series
intervenantes. Comme vue en (5), la representation comme convolution Y
t
=
i=0
ti
est equi-
valente ` a :
Y (z) = (z)(z) (23)
o` u Y (z) =
i=
Y
t
z
t
, (z) =
i=
t
z
t
sont les fonctions generatrices doublement innies, et
(z) est la fonction de transfert. En appliquant cette relation dans les deux membres de (22)
on trouve que :
(z)Y (z) = (z)(z)
En comparant avec (23), nous voyons que lhypoth`ese ARMA(p,q) est equivalente ` a la ratio-
nalite de la fonction de transfert :
(z) =
(z)
(z)
La modelisation ARMA pt etre vue aussi comme une approximation Pade.
Hypoth`ese : Le besoin de travailler avec des series stationnaires ARMA ayant representations
causales et inversibles (voir dessous) nous forcent a accepter au debut seulement des fonctions de
transfert (z) qui nont ni des racines ni des poles dans le cercle unitaire |z| 1. Plus tard, en
renoncant ` a la stationarite, nous alons permettre aussi des poles sur le cercle unitaire |z| = 1 ; (ces
extensions sapellent mod`eles ARIMA et SARIMA).
Exemple 4.1 ARMA(1,1) Trouver la representation AR() (i.e.
t
=
i=0
i
Y
ti
) du processus
ARMA(1)
Y
t
=
t
+
t1
+ Y
t1
4.3.5 Les mod`eles ARIMA(p,d,q)
Denition 4.11 On appelle processus ARIMA(p,d,q) un processus X
t
pour le quel le processus
dierencie dordre d, Y
t
= (1 B)
d
X
t
, t Z verie une relation de recurrence ARMA(p,q) :
Y
t
=
p
i=1
i
Y
ti
+
q
i=0
ti
(B)Y
t
= (B)
t
, t Z (24)
o` u les
i
,
i
sont des reels et
t
est un bruit blanc de variance
2
.
La notation des polyn omes de retard ram`ene (24) ` a la forme :
(B)Y
t
= (B)(1 B)
d
X
t
:= (B)X
t
= (B)
t
o` u (B) := (B)(1 B)
d
.
Remarquons que ces processus ont a peu pres la meme denition que les procesus ARMA, la
seule dierence etant quon permet au symb ole autoregressif (B) davoir la racine 1.
20
4.3.6 Les mod`eles SARIMA(p,d,D,q)
Denition 4.12 On appelle processus SARIMA(p,d,D,q) un processus X
t
pour le quel le processus
obtenu en dierenciant d fois et en enlevant une saisonalite dordre D : Y
t
= (
D1
i=0
B
i
)(1
B)
d
X
t
, t Z verie une relation de recurrence ARMA(p,q) :
Y
t
=
p
i=1
i
Y
ti
+
q
i=0
ti
, t Z (25)
o` u les
i
,
i
sont des reels et
t
est un bruit blanc de variance
2
.
La notation des polyn omes de retard ram`ene (25) ` a la forme :
(B)Y
t
= (B)(
D1
i=0
B
i
)(1 B)
d
X
t
:= (B)X
t
= (B)
t
o` u (B) := (B)(
D1
i=0
B
i
)(1 B)
d
.
Remarquons que ces processus ont a peu pres la meme denition que les procesus ARMA, la
seule dierence etant quon permet au symb ole autoregressif (B) davoir la racine 1, et aussi les
racines de lunite dordre D. On peut envisager aussi des mod`eles plus generaux, ayant des racines
de lunite multiples, ce qui revient ` a permettre des symb oles autoregressifs (B) ayant des racines
rationels sur le cercle unitaire |z| = 1.
4.4 (*)Linversion des series des puissances et des ltres (B)
Le resultat suivant est utile pour linversion des mod`eles AR(p), et aussi des ARMA(p,q), qui
sont des processsus Y
t
satisfaisant des equations de la forme : (B)Y
t
= (B)
t
.
Theor`eme 4.3 a) Pour un polyn ome (z) =
p
i=1
(1z/
i
) qui a toutes ses racines
i
` a lexterieur
du cercle unitaire |z| 1,
1
(z)
a un developpement en serie de Taylor
1
(z)
=
n=0
n
z
n
qui est convergente ` a linterieur du cercle unitaire |z| = 1. Dans le cas le plus simple des racines
i
distinctes, on a
n
=
p
i=1
K
i
n+1
i
(26)
o` u K
i
=
1
(
i
)
. (Dans le cas des racines confondues, on a des formules similaires qui utilisent
derivees de degre superieur).
b) Pour un polyn ome (z) =
p
i=1
(1 z/
i
) qui a toutes ses racines
i
` a linterieur du cercle
unitaire |z| 1,
1
(z)
a un developpement en serie de Laurent
1
(z)
=
n=1
n
z
n
qui est convergente sur le cercle unitaire |z| = 1. Dans le cas le plus simple des racines
i
distinctes,
on a
n
=
p
i=1
K
i
n+1
i
(27)
o` u K
i
=
1
(
i
)
c) Dans le cas mixte avec racines ` a linterieur et aussi ` a lexterieur du cercle
unitaire on a un melange des formules ci-dessus.
21
Ce resultat justie des manipulations formelles analogues quon fait avec des fonctions dans
loperateur B
3
.
4.4.1 Causalite des mod`eles AR(p)
Rappelons quil y a un probl`eme (non-causalite) avec le mod`ele AR(1) quand la racine =
1
de son polyn ome (z) = 1 z est ` a linterieur du cercle unitaire. Ce probl`eme est lie ` a lexistence
des plusieurs developpement possibles pour la fonction (z)
1
=
1
1z
:
1
1 z
=
n=0
n
z
n
si || > 1, ` a linterieur du cercle |z| , mais
1
1 z
=
1
n=
n
z
n
si || < 1, ` a lexterieur du cercle unitaire, |z|
On a la meme situation de pour tous les mod`eles AR(p)
Theor`eme 4.4 a) Un processus AR(p) est causal, i.e. il peut etre represente sous la forme :
Y
t
=
i=0
ti
o` u
2
i
< ssi toutes les racines de son polyn ome chract`eristique (z) sont ` a
lexterieur du cercle unitaire. Les coecients
i
sont dans ce cas les coecients de la serie Taylor
de (z) =
1
(z)
4.4.2 Inversibilite des processus MA(q)
Denition 4.13 Une representation causale
Y
t
=
i=0
ti
dun processus stationaire Y
t
sappelle inversible si on peut aussi representer le bruit par une
representation causale :
t
=
i=0
i
Y
ti
(28)
o` u
2
i
<
Exemple 4.2 Le processus MA(1) Y
t
=
t
+
t1
est inversible ssi < 1. En eet, comme dans
la resolution de la recursion AR(1), on voit que :
t
= Y
t
Y
t1
+...()
t1
Y
1
+ ()
t
0
Pour < 1, ca converge vers
i=0
i
Y
ti
, o` u
i
= ()
i
.
3
On peut approcher de mani`ere rigoureuse les manipulations formelles comme linversion du polyn ome (B) par
plusieurs demarches :
1. Les fonctions generatrices. Cette approche associe ` a chaque suite n avec n N, n N ou n Z la
fonction
(z) =
P
n
nz
n
. Dans le premier cas appelle serie de puissances/Taylor, la serie est convergente dans
linterieur dun certain cercle de convergence, dans le deuxi`eme cas, la serie est convergente dans lexterieur
dun certain cercle de divergence et dans le troisi`eme cas, appelle serie de Laurent, la serie est convergente,
mais a des expressions dierentes dans linterieur des anneaux de convergence qui evitent les singularites.
Le role joue par la convergence dans les calculs nest pas crucial ; on peut utiliser parfois meme des series
divergentes partout, en les denissant commes objets isomorphes ` a un certain anneau algebrique.
2. Les matrices Toeplitz. On saper coit que les operateurs sur les suites correspondant ` a des polyn omes en
B sont represente par des matrices Toeplitz ; on peut demontrer que il y a un isomorphisme entre lanneau
des matrices Toeplitz est celui des fonctions generatrices. Cet isomorphisme explique lequivalence des deux
approches. Formellement, la conclusion est que loperateur B doit-etre traite commme le scalaire z = 1 (qui est
sa valeur propre), et donc lexpansion correcte pour les inversions
1
(z)
en serie des puissances dependront
du positionnement du point z = 1 par rapport aux racines.
22
Theor`eme 4.5 Un processus MA(q) avec les racines du polyn ome chract`eristique (z) ` a lexterieur
du cercle unitaire est inversible, i.e. le bruit peut etre represente sous la forme :
t
=
i=0
i
Y
ti
o` u
|
i
| < . Les coecients
i
sont dans ce cas les coecients de la serie Taylor de (z) =
1
(z)
4
Remarque 4.1 Donc,
t
apartient ` a lespace lineaire engendre par le passe du signal observe
t
sp{Y
ti
, i = 0, 1, ...}
et les espaces engendres par {Y
ti
, i = 0, 1, ...} et {
ti
, i = 0, 1, ...} coincident.
4.4.3 Causalite et inversibilite des mod`eles ARMA(p,q)
Les probl`emes de non-causabilite et non-inversibilite des mod`eles ARMA(p,q) disparaissent
quand toutes les racines de (z) et (z) sont ` a lexterieur du cercle unitaire :
Theor`eme 4.6 a) Un processus ARMA(p,q) avec toutes les racines du polyn ome chract`eristique
(z) ` a lexterieur du cercle unitaire est causal, i.e. il peut etre represente sous la forme : Y
t
=
i=0
ti
o` u
|
i
| < et donc Y
t
apartient au espace lineaire engendre par le passe du bruit
Y
t
sp{
ti
, i = 0, 1, ...}
Les coecients
i
sont dans ce cas les coecients de la serie Taylor de (z) =
(z)
(z)
b) Un processus ARMA(p,q) avec les racines du polyn ome chract`eristique (z) ` a lexterieur
du cercle unitaire est inversible, i.e. le bruit peut etre represente sous la forme :
t
=
i=0
i
Y
ti
o` u
|
i
| < et donc
t
apartient au espace lineaire engendre par le passe du signal observe
t
sp{Y
ti
, i = 0, 1, ...}
Les coecients
i
sont dans ce cas les coecients de la serie Taylor de (z) =
(z)
(z)
Corollaire 4.1 Pour un processus ARMA(p,q) avec toutes les racines des polyn omes chract`eristiques
(z), (z) ` a lexterieur du cercle unitaire, les espaces lineaires engendres par le bruit et le passe du
signal coincident :
sp{Y
ti
, i = 0, 1, ...} = sp{
ti
, i = 0, 1, ...}
et
EY
t
t+k
= 0, k 1
Remarque : Ce corollaire permetra un developpement immediate dune approche de prevision
(=regression) par projection dans lespace de Hilbert engendre par le passe.
En conclusion, comme du point de vue pratique les developpements Laurent sont inacceptables
pour la prevision (parce-quelles impliquent les valeurs futures, imprevisibles du bruit), nous allons
considere desormais surtout les mod`eles ARMA(p,q) avec toutes les racines de (z) et (z) ` a
lexterieur du cercle unitaire, qui sont causales et inversibles, et on sappuyera sur le corollaire
ci-dessus.
Exercice 4.5 Soit Y
t
un processus ARMA(1,1) veriant lequation Y
t
0.5Y
t1
=
t
+0.4
t1
avec
t
un bruit blanc.
1. Precisez si le processus est stationnaire, causal et inversible, et calculez sa fonction dautoco-
variance.
4
La demonstration est basee sur un theor`eme concernant le developpement en serie des puissances des inverses des
polynomes complexes voir la prochaine section et nalement sur le fait que lensemble des ltres est isomorphe ` a
lensemble des fonctions complexes (z), lisomorphism etant la transformee z des suites. Cet isomorhisme explique
quelques manipulations formelles avec les ltres (mais pas celles lies ` a linversion).
23
2. Trouvez les coecients
j
de sa representation comme processus MA() et les coecients
j
de sa representation comme processus AR() et precisez si ces representations sont conver-
gentes.
Memes questions pour le processus ARMA(2, 1) deni par :
Y
t
0.7Y
t1
+ 0.1Y
t2
=
t
+ 2
t1
Remarque : Dans le cas le plus simple avec les racines
i
de lequation (z) = 0 dis-
tinctes, on obtient facilement des formules generales pour les coecients
n
en comen cant par un
developpement en fractions simples (z) =
(z)
(z)
=
i
K
i
1
1z/
i
o` u
i
sont les racines du (z) et
donc K
i
=
(
i
)
(
i
)
. On arrive ` a :
n
=
p
i=1
K
i
n+1
i
. Des formules pareilles existent pour
n
, et dans
le cas des racines non-distinctes.
Dans le cas des racines non-distinctes et complexes, il est preferable daborder le developpe-
ment Taylor
(z)
(z)
= (z) directement, en obtenant des equations de recurrence pour
k
, ` a partir des
coecients du developpement (z) (z) = (z). Cette m`ethode, est en eet applicable toujours :
Exercice 4.6 ARMA(2,1)
1. Trouver par la m`ethode directe la representation MA() dun processus ARMA(1,1) causale
Y
t
= Y
t1
+
t
+
t1
2. Trouver la representation AR() dun processus invertible ARMA(1,1).
Cet exercice peut etre generalise :
Theor`eme 4.7 (*) a) Pour un procesus ARMA(p,q) (B)Y
T
= (B)
t
avec toutes les racines du
polyn ome chract`eristique (z) ` a lexterieur du cercle unitaire, les coecients
i
=
2
EY
t
ti
de
la representation causale Y
t
=
ti
satisfont la recurrence
0
= 1,
k
=
k
+
min[k,p]
i=1
(i)(k i), 1 k q
k
=
min[k,p]
i=1
(i)(k i), k > q
Rappel : La derni`ere equation est appellee recursion de Yule-Walker.
Notes : a) Remarquez que pour le processus ARMA(p,q), la recurence pour k > q est exac-
tement comme pour le processus AR(p) ; mais, les premi`eres equations obtenues en comparant les
coecients des puissances en (B) (B) = (B) pour k q changent par lajout de
k
de cote
droite.
b) Pour un procesus ARMA(p,q) (B)Y
T
= (B)
t
avec toutes les racines du polyn ome
chract`eristique (z) ` a lexterieur du cercle unitaire, les coecients
i
de la representation inverse
t
=
i
Y
ti
satisfont la recurrence
0
= 1,
k
=
k
+
min[k,q]
i=1
(i)(k i), 1 k p
k
=
min[k,q]
i=1
(i)(k i), k > p
Exemple 4.3 Ainsi,
1
=
1
+
1
,
2
=
2
+
2
1
+
1
1
+
2
,
3
=
3
+2
1
2
+
3
1
+(
2
+
2
1
)
1
+
2
+
3
, ...
Note : Les representations inverse/causale permettent dappliquer aux processus ARMA(p,q)
les m`ethodes adaptes aux mod`eles AR()/MA().
24
4.5 Exercices : TD 2
1. Calculer la fonction dautocovariance du processus ` a valeurs en R
2
:
Y
n
=
_
a
0
n
+a
1
n1
b
1
n1
+b
2
n2
_
o` u
n
est un bruit blanc standard.
2. Restrictions sur les valeurs des coecients dautocorrelation pour les processus MA.
Trouvez, pour le processus MA(1), les valeurs maximales et minimales de la correlation
1
et
les valeurs de pour les quelles ces valeurs sont atteintes.
3. a) Determinez la correlogramme des processus suivants :
(i) le processus MA(2) Y
t
= Z
t
+
1
Z
t1
+
2
Z
t2
(ii) le processus MA(3) Y
t
= Z
t
+
1
Z
t1
+
2
Z
t2
+
3
Z
t3
b) Calculez et tracez la correlogramme pour les cas :
(i) MA(2) :
1
= 5/6,
2
= 1/6
(ii) MA(2) :
1
= 0.8,
2
= 0.5
(iii) MA(3) :
1
= 0.8,
2
= 0.4,
3
= 0.3
4. Investiguez si les deux processus MA(2) sont inversibles, en examinant la recurrence obtenue
par la m`ethode des coecients indetermines.
5. Soit Y
t
un processus ARMA(1,1) veriant lequation Y
t
0.5Y
t1
=
t
+ 0.4
t1
avec
t
un
bruit blanc.
(a) Precisez si le processus est stationnaire, causal et inversible.
(b) Trouvez les coecients
j
de sa representation comme processus MA() et les coe-
cients
j
de sa representation comme processus AR() et precisez si ces representations
sont convergentes.
6. Memes questions pour les processus ARMA(2, 1) et ARMA(2, 2) denies par :
a) Y
t
1
2
Y
t1
3
16
Y
t2
=
t
+ 1.25
t1
b) (1 B +
B
2
4
)Y
t
= (1 +B +B
2
)
t
7. Soit le processus :
(1 .8B +.16B
2
)Y
t
= (1 + B)
t
(a) Est-ce que ce processus est stationnaire causal ? Si oui, obtenez la representation
du Y
t
par rapport au bruit
t
.
(b) Sous quelles conditions est ce processus inversible ? Obtenez la representation du
bruit
t
en termes de la serie. De quel probl`eme on saper coit si le processus nest pas
inversible ?
8. a) Trouvez les inegalites (il y en a trois) qui denissent la region (trianguaire) du plan (
1
,
2
)
pour laquelle un processus MA(2) est inversible. Tracez la region sur un graphe. Indiquez le
domaine des racines reelles et celui des racines complexes. Indication : Les conditions pour
avoir racines de module plus grand que 1 sont dierentes pour le cas des racines complexes et
celui des racines reeles, et pour un polyn ome (z) = 1 +
1
z +
2
z
2
, la condition pour racines
reeles de module plus grand que 1 sont plus compliquees que les conditions (equivalentes) que
le polyn ome reciproque
(z) = z
2
(1/z) = z
2
+
1
z +
2
ait des racines reeles z
i
de module
plus petit que 1. Pour ce dernier polyn ome, les conditions sont :
(a) racines complexes : |z
i
|
2
= |z
1
z
2
| = |
c
a
| = |
2
| < 1.
(b) racines reeles :
(1) = 1 +
1
+
2
> 0,
(1) = 1
1
+
2
> 0
25
b) (*) Pour le processus MA(2), trouvez un domaine S contenant toutes les valeurs possibles
des coecients dautocorrelation
1
,
2
tel que le processus soit inversible, et les valeurs de
1
,
2
pour les quelles les valeurs sur la fronti`ere de S sont atteintes.
9. (*)Trouver le domaine de causalite dans le plan (
1
,
2
) dun processus AR(2).
10. Obtenez, en partant directement du syst`eme de Yule-Walker, les premi`eres cinq correlations
pour un processus AR(2) avec : a)
1
= 0.6,
2
= 0.2 b)
1
= 0.6,
2
= 0.2 Calculez aussi
la variance (0). Tracez les correlations.
11. a) Veriez si le processus AR(2) Y
t
= 0.3Y
t1
+0.10Y
t2
+
t
est stationnaire causal. Calculez
son correlogramme, en partant directement du syst`eme de Yule-Walker, et tracez le.
b) Meme questions pour le procesus AR(2) Y
t
= Y
t1
0.34Y
t2
+
t
.
12. Calculez la fonction dautocovariance et la fonction dautocorrelation des processus dans les
exercices anterieurs.
13. Une question dunicite - est-ce que deux processus distincts peuvent avoir la meme FAC
(fonction dautocovariance) ?
Soient {u
t
, t Z} et {v
t
, t Z} deux bruit blancs de variances respectives
2
et
2
2
, o
0 < || < 1. On consid`ere alors les processus aleatoires {X
t
, t Z} et {Y
t
, t Z} tels que :
X
t
= u
t
+u
t1
Y
t
= v
t
+
1
v
t1
Montrer que {X
t
, t Z} et {Y
t
, t Z} ont la meme fonction dautocovariance.
14. (*) Une question dinversibilite - est ce quun processus ` a representation MA noninversible
peut aussi avoir une autre representation inversible ? Soit {U
t
, t Z} le processus aleatoire
deni par lequation
U
t
=
t
+
1
t1
o` u || < 1
et
t
est bruit blanc.
(a) Montrer que cette representation du processus U
t
nest pas inversible.
(b) On pose maintenant w
t
=
+
j=0
j
U
tj
. Montrer que {w
t
, t Z} est un bruit blanc dont
on precisera la variance en fonction de
2
et
(c) Montrer que U
t
= w
t
+w
t1
et que cette representation de {U
t
, t Z} est inversible.
Solutions :
4) La region de inversibilite dans le domaine (
1
,
2
) :
2
>
1
1
2
>
1
1
2
< 1
est le triangle situe dessus les deux lignes
2
+
1
= 1,
2
=
1
1 et dessous la ligne
2
< 1.
Les racines sont reelles/complexes dessous/dessus la parabole
2
=
2
1
4
.
b) Pour passer de (
1
,
2
) ` a (
1
,
2
) on utilise
1
=
1
(1 +
2
)
1 +
2
1
+
2
2
2
=
2
1 +
2
1
+
2
2
Transformant les equations anterieures, on trouve :
2
= 1 implique
1
=
2
1
2+
2
1
,
2
=
1
2+
2
1
,
1
=
1
2
2
,
2
(2 +
2
1
4
2
2
) = 2
2
+
2
1
4
2
= 1 et donc
2
1
= 4
2
(1 2
2
). Finalement, on trouve
dessous
1
= 2
_
2
(1 2
2
)
2
+ 1/2
1
2
+ 1/2
1
26
o` u les derni`eres deux inegalites viennent de linegalite entre les moyennes arithmethique et
geometrique de (1 +
2
),
1
.
5) Le domaine de causalite dun processus AR(2)
Y
t
=
1
Y
t1
+
2
Y
t2
+
t
( beaucoup plus compliquee que pour le AR(1)), obtenu comme le domaine dinversibilite du
processus MA(2), est le triangle situe en dessous de
2
+
1
< 1,
2
1
< 1 et dessus
2
= 1.
4.6 TP
1. Eectuez une analyse Box-Jenkins dun jeu de donnees : par exemple WWWusage en R
(qui represente le nombre dutilisateurs connectes ` a un serveur Internet chaque minute),
en utilisant les commandes acf(x), pacf(x) (ou eda.ts(x), si disponible) arima(),
pnorm() et eda.ts(x$res) . Lanalyse devrait aboutir dans un mod`ele avec residus tel
quau plus 1 sur 20 des coecients acf et pacf sortent de lintervalle de conance autour de 0,
,et avec p-valeurs des coecients inferieures ` a .05 (rappel : p-val P{|t
v
al| 2}, o
`
t-val sont
les valeurs standardisees, i.e. divisees par lerreur standard (s.e.).
2. Repetez, avec un jeu de donnees de votre choix (` a trouver ` a partir de la liste data(package=NULL)
ou data(package=ts).
3. Ecrivez des programmes qui simulent (sans utiliser la commande arima.sim) des processus :
a) MA(2) avec
0
= 1, les autres coecients ` a choisir, et ` a bruit petit, b) AR(2) ` a bruit petit,
c) ARMA(2,2) (en passant la sortie du premier program au deuxi`eme), et d) ARIMA(2,1,2)
(en appliquant cumsum ` a la sortie du program anterieur).
Enoncez les theor`emes satisfaits par lacf et le pacf des premiers deux cas, et veriez ensuite
que vos programmes produisent des resultats adequats.
Pour le troisi`eme et quatri`eme cas, estimez le mod`ele par la commande arima, avec les ordres
simules, et aussi avec des ordres plus grands. Est-ce que la commande retrouve les coecients
que vous aviez choisi quand le bruit est tres petit (en supposanr que lanalyse est bonne, et
donc que lacf et pacf des residus indiquent un bruit blanc) ?
4. Interpretation de lacf
(a) Soit x un vecteur de nombres consecutifs. Simulez une serie a) lineaire y = ax
b) quadratique y = ax
2
+bx
c) periodique y = sin(ax)
d) presque periodique y = sin(ax) +sin(bx)
en donnant deux exemples de a, b pour chaque probl`eme (donc 12 exemples). Obtenez
lacf de toutes les series et indiquez vos observations sur la dependence de a, b.
(b) Pour les series avec acf non zero, indiquez quels ltres/transformations pourront nous
amener aux residus bruit blanc.
(c) Demontrez sur trois des exercices anterieurs leet sur lacf de lajout du bruit blanc
decart type = R/4, = R et = 3R, o` u R = max y
i
min y
i
est lecart du signal
deterministe.
Inclure au moins un exemple qui a besoin du ltrage, et etudier encore une fois leet
du meme ltrage.
4.7 (*) La positivite : caracterization des suites de covariance
Les suites de nombres qui peuvent etre covariances sont uniquement caracterisees par leur
transformee Fourier.
27
Theor`eme 4.8 (*Bochner) Une suite paire
k
L
2
peut representer les covariances dune serie
stationnaire ssi la transforme Fourier apellee aussi densite spectrale
f(w) =
0
+ 2
k
cos(wk)
est nonnegative pour chaque w.
Il y a une caracterisation equivalente en termes des matrices de covariance. Soit X un processus
p-dimensionnel, stationnaire ` a lordre 2, suppose centre. On note la fonction dautocovariance de
X
(k) = E(X
n
X
t
nk
) est une matrice carree dordre p.
(k) = (k)
t
. En particulier, la matrice de variance-covariance du processus X est une
matrice hermitienne (symetrique dans le cas reel) puisque (0) =
t
(0).
Dans le cas p = 1, |(k)| (0).
((k))
kZ
est une famille de type positif, cest-` a-dire que pour tout A
1
. . . A
k
de C
p
et tout
n
1
. . . n
k
k
i=1
k
j=1
A
t
i
(n
i
n
j
)A
j
0.
Preuve Soit W =
k
i=1
A
t
i
X
n
i
. On a alors
V ar(W) = E[
k
i=1
A
t
i
X
n
i
k
j=1
A
t
j
X
n
j
]
= E[
k
i=1
k
j=1
A
t
i
X
n
i
X
t
n
j
A
j
]
=
k
i=1
k
j=1
A
t
i
(n
i
n
j
)A
j
0.
Dans le cas univarie, la matrice dautocovariance est une matrice de Toeplitz
C
n
=
_
_
_
_
_
_
_
_
_
_
(0) (1) (2) . . . (n 1)
(1) (0) (1) . . . (n 2)
(2) (1) (0) . . . (n 3)
. . . . . . .
. . . . . . .
. . . . . . .
(n + 1) (n + 2) (n + 3) . . . (0)
_
_
_
_
_
_
_
_
_
_
Cette matrice carree dordre n est positive, en eet
a
t
C
n
a =
n
i=1
n
j=1
a
i
(i j)a
j
0.
Au lieu de considerer la fonction dautocovariance, on peut choisir dutiliser la fonction dauto-
correlation
(k) = (
i,j
(k)) = (
i,j
(k)
_
i,i
(0)
j,j
(0)
)
Cela revient ` a considerer non pas le processus X mais un processus Y = (Y
n
) dont la coor-
donnee i denie par Y
(i)
n
= X
(i)
n
/
_
i,i
(0) est de variance 1.
28
5 La prevision lineaire
On se propose de donner au temps t une prevision
X
t
(k) de la valeur X
t+k
dun processus.
Donc
1. t est le temps de prevision
2. k > 0 est lecart de prevision
3. t +k est le temps a predire.
4.
X
t
(k) =
X(t + k|t) = E[X
t+k
|F
t
] (toutes ces notations sont rencontrees dans la literature)
sont les previsions k pas en avant
5. e
t
(k) = X
t+k
X
t
(k) sont les erreurs de prevision.
Comme les processus ARIMA(p,d,q) satisfont des contraintes lineaire, il est naturel de chercher
une prevision lineaire X
t
(k) par une combinaison lineaire de valeurs passees ou du bruit blanc,
` a variance minimale, cest ` a dire,
X
t
(k) =
i=0
k
(i)X
ti
ou
X
t
(k) =
i=0
a
k
(i)
ti
, k = 1, 2...
Toutes les trois representations AR(), MA() et ARMA(p, q) nous aideront dans la prevision,
notamment la premi`ere. Par exemple, la representation autoregressive AR()
X
t+1
=
i=0
(i)X
ti
+
t+1
nous fourni directement une formule explicite pour la prevision un pas en avant :
X
t
(1) =
X(t + 1|t) =
i=0
i
X
ti
= (1 (B))X
[
t
5]
La prediction un pas en avant est donc tr`es aisee : on applique simplement la relation dau-
toregression, en efa cant le bruit!
La representation MA() est aussi utile,` a cause du theor`eme suivant :
Theor`eme 5.1 La prevision lineaire ` a variance minimale des processus ARMA(p,q) avec du bruit
blanc Gaussien coincide avec lesperance conditionelle
X
t
(k) = E[X
t+k
|F
t
]
o` u F
t
= {X
t
, X
t1
, ..., X
0
, X
1
, ...}.
Outrement dit, la prevision lineaire ` a variance minimale satisfait les equations de projection :
E
_
X
s
_
X
t+k
X
t
(k)
_
= 0, s t
Nous allons pouvoir proter du fait que loperateur desperance conditionnelle
X
t
(k) est li-
neaire.
La dierence Y
t+1
Yt(1) a covariance 0 avec les variables deja observees Yt, Y
t1
, Y
t2
, .... Un peu plus general est le
concept de bruit dinnovation.
5
ainsi, le probl`eme de prevision 1 pas en avant se reduit formellement ` a travers la decomposition Xt+1 =
X(t +
1|t) + t+1 = (B)Xt + (1 (B))Xt au calcul des deux ltres 1 (B) et (B)) ; des formules pareilles existent
pour des ecarts plus grands que 1.
29
Denition 5.1 Si un processus Yt deni par une autoregression (18) Yt = f(Y
t1
, Y
t2
, ...) + t est tel que le bruit blanc
t = Y
t+1
f(Yt, Y
t1
, Y
t2
, ...) = Yt
Yt est independent du passe F
t1
= (Y
t1
, Y
t2
, ...), alors le bruit t sera appellee
bruit dinnovation (par rapport au passe).
Dans ce cas,
E[t|[Y
t1
, Y
t2
, ...] = 0 (29)
et et est noncorrele avec Y
t1
, Y
t2
, ....
Rq : Dans le cas des equations autoregressives causales, le bruit blanc a la propriete tr`es convenable de coincider avec
lerreur de prediction un pas en avant Y
t+1
Yt(1).
5.1 La prevision des processus ARIMA(p,d,0)
Nous considerons maintenant plus en detail la prevision des processus autoregressifs ARIMA(p,d,0),
en utilisant la notation
i
au lieu de
i
, meme quand p = , et en permettant aussi des racines
du symb ole sur le cercle unitaire (mais pas dedans).
Les demonstrations sont plus aisees dans le cas stationnaire AR(p) causal. La m`ethode princi-
pale est dappliquer loperateur chapeau dans lequation lineaire denissant le mod`ele, en tenant
compte de la representation causale MA().
Theor`eme 5.2 Pour un mod`ele ARIMA(p,d,0)
(B)X
t
=
t
tel que le symbole (z) ne sannule pas dans linterieur du cercle unitaire, le bruit
t
satisfait
E[
t+k
|F
t
] = 0 si k > 0 (etant donc un bruit dinnovation).
Les previsions satisfont la recurrence Yule-Walker :
X
t
(k) := E[X
t+k
/{X
t
, X
t1
, ...}] =
p
i=1
i
X
t
(k i)
En particulier,
X
t
:=
X
t
(1) = E[X
t+1
/{X
t
, X
t1
, ...}] =
p
i=1
i
X
t
(1 i) =
p
i=1
i
X
ti
Demonstration
1. Dans le cas AR(p), on utilise le theor`eme 5.1. Pour ecart 1 par exemple, ca revient a verier
que :
E[X
s
t+1
] = 0, s t
ce qui est immediat par la causalite et donc lindependence de
t+1
de F
t
= {X
t
, X
t1
, ...}.
2. Le cas des processus autoregressifs ARIMA(p,d,0) ` a ordre d ni est obtenu en lapprochant
par des processus AR(p+d).
Exemple 5.1 La prevision lineaire X
t
(k) pour un processus AR(1) ` a moyenne 0 satisfait la rec-
cursion Yule Walker
X
t
(k) = X
t
(k 1)
et donc est simplement
X
t
(k) = X
t
k
Pour un processus AR(1) ` a moyenne connue elle est
X
t
(k) = (X
t
)
k
30
Exemple 5.2 La prevision lineaire X
t
(k) pour le processus ARIMA(0,1,0) ` a moyenne satisfait
la reccursion Yule Walker
X
t
(k) = X
t
(k 1)
et est donc constante
X
t
(k) = X
t
(cest un cas limite de la formule dans lexercice anterieur sur la prevision AR(1)).
Theor`eme 5.3 Pour le processus AR(2)
(B)X
t
= (1
1
B)(1
2
B)X
t
=
t
(avec
1
,
2
etant les inverses des racines de (z) = 0), les previsions Box-Jenkins X
t
(k) au temps
t satisfont la reccursion :
(B)X
t
(k) = X
t
(k)
1
X
t
(k 1)
2
X
t
(k 2) = X
t
(k) (
1
+
2
)X
t
(k 1) +
1
2
X
t
(k 2) = 0
Les previsions sont de la forme :
X
t
(k) = A
1
(t)
k
1
+A
2
(t)
k
2
(30)
En termes des deux derni`eres valeurs observees X
t
et X
t1
, quand
1
=
2
, les previsions sont
donnees par :
X
t
(k) =
k+1
1
k+1
2
2
X
t
(
k+1
1
2
k+1
2
1
)
2
X
t1
si
1
=
2
(31)
X
t
(k) = X
t1
k+1
+ (X
t
X
t1
)(k + 1)
k
si
1
=
2
= (32)
Demonstration : Les previsions
X
t
(k) satisfont lequation Yule Walker
X
t
(k) =
1
X
t
(k 1) +
2
X
t
(k 2)
avec valeurs initiales
X
t
(0) = X
t
,
X
t
(1) = X
t1
.
La solution generale de la recurrence dordre deux (k) =
1
(k 1) +
2
(k 2), pour
valeurs initiales arbitraires (0) = x
0
, (1) = x
1
est :
1. avec des racines distinctes
1
,
2
:
(k) =
k+1
1
k+1
2
2
x
0
(
k+1
1
2
k+1
2
1
)
2
x
1
2. avec des racines confondues
1
=
2
= :
(k) = x
1
k+1
+ (x
0
x
1
)(k + 1)
k
ce qui rend le resultat.
Notes : a) Dans le cas causal,
i
< 1, et donc la prevision eventuelle
lim
k
X
t
(k) = 0
est toujours 0.
b) Il est facile detendre cette approche pour tous les processus autoregressifs ARIMA(p,d,0) ` a
ordres p, d nis, et dobtenir des formules explicites de prevision en termes de racines de lequation
(z) = 1.
Exemple 5.3 Deduisez la formule de prevision Box-Jenkins pour un processus ARIMA(1, 1, 0)
Calculez la limite lim
k
X
t
(k) pour un processus ARIMA(1, 1, 0)
31
Exemple 5.4 On consid`ere un processus {X
t
} pour lequel la serie dierencie deux fois est un
bruit blanc, cest ` a dire {X
t
} est un processus ARIMA(0,2,0). Montrez que la fonction de prevision
Box-Jenkins est donnee par
X
t
(k) = X
t
+k(X
t
X
t1
) , k 0.
donc les previsions se trouvent sur la droite qui passe par les deux derni`eres points.
Denition 5.2 Les dernieres p +d valeurs
_
X
t
(q), X
t
(q 1), ..., X
t
(q d p + 1)
_
qui precedent
X
t
(q) (donc avant le point o` u la reccursion de Yule Waker devient valable) sapellent les valeurs
pivots.
En conclusion, nous voyons que le type de la fonction de prevision X
t
(k) dans le cas des
processus autoregresifs (sans partie MA) est determine compl`etement par la fonction (z) et les
valeurs pivots. Dans le prochain chapitre nous verrons que ca reste vrai dans un certain sense pour
les processus ARIMA(p,d,q).
5.2 Prevision lineaire des mod`eles ARIMA(p,d,q)
Pour la prevision lineaire X
t
(k) des processus ARIMA(p,d,q), nous aurons besoin aussi dune
estimation de
t1
,
t2
, ...,
tq
, i.e. du bruit inobservable passe du mod`ele, ou au moins de
1
,
2
, ...(q), quon approxime parfois par 0. On peut aussi recourir ` a la representation autore-
gressive ARIMA(,d,0), dans quel cas on aura besoin de X
1
, X
2
, ..., X
q
, qui sont aussi inobser-
vables. Dans tout cas, le resultat nal demandra une approximation des valeurs precedant le debut
dobservations 0 ; lapproximation la plus simple dans labsence des moyennes est
k
= X
k
= 0 pour
k < 0.
Exemple 5.5 Calculez les previsions
X
t
(k) pour un processus MA(1) X
t+1
=
t+1
+
t
.
Solution : Pour le processus MA(1), on verie facilement que
X
t
(k) = 0 pour k = 2, 3, ...,
(pour une generalisation, voir le theor`eme ??). Pour k = 1, la denition :
X
t+1
=
t+1
+
t
donne :
X
t
(1) =
t
Pour se debarasser de
t
, on peut utiliser la representation :
t
=
i=0
(1)
i
i
X
ti
= X
t
+
i=i
(1)
i
i
X
ti
Donc, X
t+1
=
t+1
+
i=1
(1)
i1
i
X
t+1i
et
X
t
(1) =
i=0
(1)
i
i+1
X
ti
X
t
(k) = 0, k = 2, 3, ...
Si on suppose que linformation est nie, i.e. F
t
= {X
t
, X
t1
, ..., X
1
}, la formule de prevision,
obtenue par reccursion, est :
X
t
(1) = E[X
t+1
|F
t
] =
t1
i=0
(1)
i
i+1
X
ti
()
t+1
0
Comme
0
nest pas connue, en pratique on utilise :
X
t
(1) =
t
i=0
(1)
i
i+1
X
ti
. Si < 1 et t est
large, la dierence sera negligeable.
Donc, cet example montre deja quune estimation du bruit inobservable
t
ou au moins de
0
est incontournable pour les mod`eles ARMA avec q 1.
32
Theor`eme 5.4 Dans le cas dun mod`ele ARIMA(p,d,q), la meilleure prevision lineaire de Box-
Jenkins au temps t,
X
t
(k), satisfait :
X
t
(k) = E[X
t+k
|F
t
] =
p
i=1
i
X
t
(k i) +
q
i=k
i
t+ki
(33)
o` u les
i
sont les coecients du polyn ome (B)(1 B)
d
(dans le cas dun mod`ele ARMA(p,q)
i
=
i
).
Les inconnues
ti
, i 0 peuvent etre enleves en utilisant la representation inverse du
bruit en fonction de la serie, ou en utilisant
t
= Y
t
Y
t1
(1) (les derni`eres se calculent recursive-
ment). Une estimation arbitraire de
0
,
1
, ..., ou de X
0
, X
1
, ... sera necessaire.
Rq : Pour k > q, la formule (33) est exactement la reccurence homog`ene Yule-Walker
(B)
X
t
(k) = 0, et donc la prevision sera donnee par la solution de cette equation qui passe
par les p +d points pivots X
t+q
, ..., X
t+qpd+1
, ajustes en tenant compte du bruit
t
, comme
indique en (33).
Par exemple, pour les processus ARIMA(0,d,q) la fonction de prevision
X
t
(k) est un polynome
dordre d 1 en k.
Corollaire 5.1 Dans le cas des processus ARIMA(p,d,0) la fonction de prevision
X
h
(k) est la
solutions de la reccursion (B)X
t
(k) = 0 qui passe par les valeurs pivots X
t
, ..., X
tpd+1
.
Exemple 5.6 Deduisez la formule de prevision Box-Jenkins pour un processus ARIMA(1, 2, 0)
Calculez la limite lim
k
X
t
(k) pour un processus ARIMA(1, 2, 0)
Corollaire 5.2 La prevision lineaire X
t
(k) pour le processus ARIMA(0,d,0) est donnee par le
polyn ome dordre d 1 qui passe par les d derni`eres points.
Exercice 5.1 On consid`ere le processus ARMA(1,1) ` a moyenne 0 (1 B)Y
t
= (1 +B)
t
o` u
1 < < 1
et 1 < < 1.
1. Montrez que la fonction de prevision Box-Jenkins est donnee par Y
t
(k) = Y
t
(1)
k1
, k 1,
et que
Y
t
(1) = Y
t
+
t
= ( +)Y
t
Y
t1
(1)
= ( +){Y
t
Y
t1
+
2
Y
t2
+. . .}
Est ce que ces resultats restent vrais si = 1, donce pour ARIMA(0,1,1) ?
2. On utilise ce mod`ele pour ajuster une serie et on obtient comme estimations des param`etres
= 0.8, = 0.3 et =?. Les dix derni`eres valeurs disponibles sont :
t : 51 52 53 54 55 56 57 58 59 60
y
t
: 2.98 4.10 6.10 9.36 8.57 8.82 7.31 7.19 2.36 0.40
Donnez les previsions des trois valeurs suivantes de la serie. Quelle parmi les trois formules
pour Y
t
(1) ci-dessu parait la plus convenable a appliquer ?
Exercice 5.2 Le processus ARIMA(0,1,1) (appele aussi IMA(1,1)) est deni par :
(1 B)Y
t
= (1 +B)
t
Si < 1, les coecients de la representation du bruit sont :
i
= (1 +)()
i1
, i 1,
(` a verier).
33
1. Montrez quon peut le representer :
Y
t
=
t
+ (1 +)
t1
k=1
tk
+
0
2. Montrez que Y
t
= (1 +)Y
t
Y
t1
.
Note : La derni`ere formule est appellee lissage exponentiel, au moins quand (1, 0) et donc
= 1 + (0, 1). La formule donne une moyenne ponderee : Y
t
= Y
t
+ (1 )Y
t1
sappelle constante de lissage.
Remarques : 1) Plus est petit, plus la nouvelle serie est lisse et les valeurs passees ont
un plus grand poids dans la prevision. Quand est proche de 1 les valeurs les plus recentes ont le
poids le plus important.
2) On peux voir la prevision Box-Jenkins comme une generalisation du lissage exponentiel, en
utilisant des param`etres estimes ` a partir des donnees (au-lieu de ad-hoc).
Exemple 5.7 (*)La prevision des processus stationnaires ARMA(p,1) et des processus ARIMA(0,d,1)
Nous developpons maintenant plus en detail la prevision des processus ARMA(p,1) et ARIMA(0,d,1).
On conclut que ...
5.3 Exercices : TD 3
1. Soit le processus :
(1 .8B +.16B
2
)Y
t
= (1 + B)Z
t
(a) Est-ce que ce processus est stationnaire causal ? Si oui, obtenez la representation
du Y
t
par rapport au bruit Z
t
et trouvez la fonction dautocorrelation de Y
t
.
(b) Sous quelles conditions est ce processus inversible ? Obtenez la representation du
bruit Z
t
en termes de la serie. De quel probl`eme on saper coit si le processus nest pas
inversible ?
(c) Donnez la prevision k pas en avant
Y
t
(k), en utilisant les valeurs Y
t
, Y
t1
, Z
t
.
2. Trouvez les coecients dautocorrelation et tracez la correlogramme pour le processus ARMA(1,2)
Y
t
= 0.6Y
t1
+
t
0.3
t1
0.1
t2
3. Prevision du mod`ele ARIMA(2,1,0)
(1
1
B)(1
2
B)(1 B)X
t
=
t
with 1 <
1
<
2
< 1.
(a) Veriez que :
(i) X
t
(k) = (1+
1
+
2
)X
t
(k 1) (
1
+
2
+
1
2
)X
t
(k 2) +
1
2
X
t
(k 3), k 1
(ii) X
t
(k) = A
t
+B
t
k
1
+ (X
t
A
t
B
t
)
k
2
, k = 0, 1, 2, . . . pour certaines A
t
et B
t
qui
dependent seulement du t.
(b) Trouvez les poids des valeurs pivots X
t
, X
t1
, X
t2
dans la prevision Box-Jenkins de X
t
(c) Trouvez la limite lim
k
X
t
(k)
4. Previsions sous le mod`ele ARIMA(1,1,1)
Considerons le processus ARIMA(1,1,1) (1B)(1B)Y
t
= (1+B)
t
, avec 1 < < 1
et 1 < < 1.
34
(a) Montrez que Y
t
(1) = (1 +)Y
t
Y
t1
+
t
et
Y
t
(k) = (1 +)Y
t
(k 1) Y
t
(k 2) , k 2.
(b) Montrez que Y
t
(k) = A
t
+ B
t
k
pour k 0, et trouvez des expressions pour A
t
et B
t
en terms de Y
t
, Y
t1
,
t
, et , en utilisant Y
t
(0)[= Y
t
] et Y
t
(1) du (a) ci-dessus. Montrez
que :
Y
t
(k) = Y
t
+
(1
k
)
1
(Y
t
Y
t1
) +
(1
k
)
1
t
, k 0.
Trouvez la limite lim
k
Y
t
(k)
(c) Montrez que Y
t
(1) = Y
t1
(1) + (1 + +)Y
t
Y
t1
et
Y
t
(k) = Y
t1
(k + 1) +
k
t
.
(d) Montrez que Y
t
(k) peut sexprimer en fonction seulement des valeurs passees de la serie.
[Indication : utilisez les pour vous debarasser de
t
]
(e) En utilisant le mod`ele (10.6B)(1B)Y
t
= (1+0.3B)
t
obtenez les previsions des trois
termes suivants de la serie :
t : 1 2 3 4 5 6 7 8 9 10
y
t
: 14.8 12.4 9.4 7.7 7.3 9.0 10.5 11.2 10.4 11.6
t : 11 12 13 14 15 16 17 18 19 20
y
t
: 12.1 11.6 9.9 8.1 6.6 5.4 4.2 5.3 6.8 9.2
5. Considerons le processus ARIMA(1,1,2) :
(1 B)(1 B)Y
t
= (1 +
1
B +
2
B
2
)
t
o` u 1 < < 1. Soit Y
t
(k) la previson de Y
t+k
au temps t.
(a) Montrez que Y
t
(1) = (1 +)Y
t
Y
t1
+
1
t
+
2
t1
et trouvez les expressions corres-
pondantes pour Y
t
(2) et Y
t
(k) pour k 3
(b) Montrez que la fonction de prevision peut sexprimer sous la forme Y
t
(k) = a
t
+b
t
k
, k
1, et donnez la formule de a
t
, b
t
comme fonctions de Y
t
, Y
t1
,
t
,
t1
.
(c) Montrez que Y
t
(k) peut sexprimer en fonction seulement des valeurs passees de la serie.
(d) Un statisticien a utilise le mod`ele ARIMA (1,1,2) decrit ci-dessus pour une serie (denomee
prix) qui exprime le prix dune action ` a la bourse pour 100 jours consecutifs. En sa-
chant que Y
98
(1) = 686, 996 et Y
99
(1) = 659, 416 et
= 2, calculer les previsions
Y
101|100
, Y
102|100
de Y
101
et Y
102
et donner les 95% intervalles de conance associes avec
ces previsions.
6. Projet : Il serait interessant de determiner analytiquement la tendance asymptotique, i.e.
le polyn ome dordre d 1 vers le quel les previsions converge asymptotiquement pour les
processus ARIMA(p,d,q).
Considerons par exemple ARIMA(p,2,0) ; ce mod`ele inclue une tendance lineaire, pour la
quelle le premier candidat est la droite par les deux derni`eres points pivots (comme dans le
cas p = 0, quand les pivots coincident avec les valeurs X
t
, X
t1
). En general, les previsions
doivent encore converger asymptotiquement vers une droite. Pour p = 0, on commence deja
exactement sur la droite de tendance (due ` a labsence dautres racines dans la partie au-
toregressive) ; mais, pour p 1, nous serons oblige de tenir compte dautres valeurs pivots et
donc de X
t2
, X
t3
, .... A priori donc, les p points qui precedent les 2 derni`eres point auront
aussi une inuence sur la droite de tendance.
5.4 Contr ole continu en series temporelles
1. Determiner une moyenne mobile causale (B) =
q
i=0
i
B
i
dordre q minimal, qui laisse
passer une tendance quadratique sans distortion et qui enl`eve les composantes saisonni`eres
dordre 3.
35
2. Soit X
t
=
k
i=0
ti
un processus moyenne mobile, utilise pour lisser un bruit blanc
t
=
BB(0,
2
= 1).
a) Quelle est la variance de X
t
?
b) Trouvez le ltre (i.e. les coecients (
0
, ....,
k
)) qui ram`enent ` a un processus X
t
` a variance
minimale, parmi toutes les moyennes mobiles dordre k qui laissent passer une tendance
constante sans distortion.
3. On consid`ere le processus aleatoire suivant :
X
t
.2 X
t1
.35 X
t2
= 45 +
t
ou
t
est BB(0,
2
= 1).
(a) Calculer lesperance de X
t
, m = EX
t
, en supposant que le processus est stationnaire.
(b) Quelle est lequation de recurrence satisfaite par le processus Y
t
= X
t
m?
(c) Donner les equations de Yule-Walker pour les autocorrelations du processus Y
t
, calculer
les 3 premi`eres autocorrelations, ainsi que la variance.
(d) Est-ce que le processus Y
t
est stationnaire causal ? Si oui, donnez une formule generale
pour les coecients
k
de sa representation causale Y
t
=
k
k
tk
.
Solutions :
1. En demandant que (B) =
1+B+B
2
3
(a
0
+a
1
B +a
2
B
2
) satisfait (1) = 1,
(1) = 0,
(1) = 0,
on trouve : (B) = 1/9(8 7B + 2B
2
)(1 +B +B
2
) = 8/9 +B/9 +B
2
/3 5B
2
/9 + 2B
4
/9.
2. a) Var X
t
=
2
i
. b) Elle est minimise sous la contrainte
i
= 1 par la moyenne
arithmetique ` a coecients egaux.
3. (a) Ce processus AR(2) pas centre peut secrire (1.2B.35B
2
)X
t
= (1.7B)(1+.5B)X
t
=
45 +
t
En prenant esperance on trouve E(X
t
) =
45
1.2.35
=
40
.45
= 100.
(b) Soit Y
t
= X
t
EX
t
. Alors Y
t
est un processus AR(2) centre satisfaisant (1 .2B
.35B
2
)Y
t
= (1 .7B)(1 +.5B)X
t
=
t
d) La fonction dautocovariance de Y
t
(qui est la meme que celle de X
t
) est obtenue de
lequation : E(Y
t
Y
th
) = 0.2E(Y
t1
Y
th
) + 0.35E(Y
t2
Y
th
) + E(
t
Y
th
), ce qui donne
lequation Yule Walker
k
=
1
k1
+
2
k2
Pour k = 1, 2 on a le syt`eme de Yule Walker :
1
= 0.2 + 0.35
1
2
= 0.2
1
+ 0.35
La premi`ere equation donne
1
=
2
6.5
= .31, et la seconde donne
2
= 0.2
1
+ .35 = .41.
Finalement,
0
=
1
1
P
i
= 2.52.
d) Le processus est stationnaire causal car les racines du polyn ome sont a lexterieur du disque
unite. Les coecents (k) satisfont aussi lequation Yule Walker
k
=
1
k1
+
2
k2
avec valeurs initiales
0
= 1,
1
=
1
.
La solution generale de cette recurrence dordre 2, pour valeurs initiales arbitraires x
0
, x
1
et
avec des racines distinctes
1
,
2
, est :
(k) =
k
1
k
2
2
x
1
(
k
1
k
2
1
)
2
x
0
et donc ici on obtient cette formule, avec x
0
= 1, x
1
=
1
.
36
6 Sommaire des denitions et resultats dans les series temporelles
6.1 Filtres
Denition 6.1 a) Une serie s
t
sera appelee saisonni`ere de periode p ssi
p
i=1
s
t+i
= 0 (
p1
i=0
B
i
)s
t
= 0, t (34)
b) Une serie s
t
sera appelee periodique de periode p ssi
s
t+p
= s
t
(1 B
p
)s
t
= 0, t (35)
Theor`eme 6.1 Un ltre (B) annule (ou enl`eve) les composantes saisonni`eres dordre p ssi
(z) est divisible par 1+z +... +z
p1
(donc si (z) = 0, pour toutes les racine dordre p de lunite,
sauf z = 1.
Theor`eme 6.2 Lespace invariant dun ltre contient les polyn omes de degre p ssi 1 est une
racine dordre au moins p+1 de lequation (z) = 1, i.e. (1) = 1,
(1) = 0,
(1) = 0,
(p)
(1) = 0.
6.2 Causalite et inversibilite des mod`eles ARMA(p,q)
Theor`eme 6.3 a) Un processus ARMA(p) est causal(inversible), i.e. il peut etre represente sous
la forme : Y
t
=
i=0
ti
o` u
2
i
<
(
t
=
i=0
i
Y
ti
o` u
2
i
< ) ssi toutes les racines de son polyn ome chract`eristique (z)
((z)) sont ` a lexterieur du cercle unitaire. Les coecients
i
((i)) sont dans ce cas les coecients
de la serie Taylor de (z) =
(z)
(z)
((z) =
(z)
(z)
)
Theor`eme 6.4 (*) a) Pour un procesus ARMA(p,q) (B)Y
T
= (B)
t
avec toutes les racines du
polyn ome chract`eristique (z) ` a lexterieur du cercle unitaire, les coecients
i
=
2
EY
t
ti
de
la representation causale Y
t
=
ti
satisfont la recurrence
0
= 1,
k
=
k
+
min[k,p]
i=1
(i)(k i), 1 k q
k
=
min[k,p]
i=1
(i)(k i), k > q
Note : Cette derni`ere equation est appellee recursion de Yule-Walker.
b) Pour un procesus ARMA(p,q) (B)Y
T
= (B)
t
avec toutes les racines du polyn ome
chract`eristique (z) ` a lexterieur du cercle unitaire, les coecients
i
de la representation inverse
t
=
i
Y
ti
satisfont la recurrence
0
= 1,
k
=
k
+
min[k,q]
i=1
(i)(k i), 1 k p
k
=
min[k,q]
i=1
(i)(k i), k > p
Exemple 6.1 Ainsi,
1
=
1
+
1
,
2
=
2
+
2
1
+
1
1
+
2
,
3
=
3
+2
1
2
+
3
1
+(
2
+
2
1
)
1
+
2
+
3
, ...
37
6.3 Prevision lineaire
Y
t
(k) = E[Y
t+k
|F
t
] =
p
i=1
i
Y
t
(k i) +
q
i=k
i
t+ki
Dans le cas dun mod`ele ARIMA(p,d,q), les
i
sont les coecients du polyn ome (B)(1 B)
d
,
et dans le cas dun mod`ele ARMA(p,q)
i
=
i
. Les
t
peuvent etre enleves en utilisant la
representation du bruit en fonction de la serie.
Par exemple, pour le processus AR(2)
(B)X
t
= (1
1
B)(1
2
B)X
t
=
t
(avec
1
,
2
etant les inverses des racines de (z) = 0), les previsions Box-Jenkins X
t
(k) au temps
t satisfont la reccursion :
(B)X
t
(k) = X
t
(k)
1
X
t
(k 1)
2
X
t
(k 2) = X
t
(k) (
1
+
2
)X
t
(k 1) +
1
2
X
t
(k 2) = 0
La solution generale de la recurrence dordre deux (k) =
1
(k 1) +
2
(k 2), pour
valeurs initiales arbitraires (0) = x
0
, (1) = x
1
est :
1. avec des racines distinctes
1
,
2
:
(k) =
k+1
1
k+1
2
2
x
0
(
k+1
1
2
k+1
2
1
)
2
x
1
2. avec des racines confondues
1
=
2
= :
(k) = x
1
k+1
+ (x
0
x
1
)(k + 1)
k
Des lors, les previsions sont de la forme :
X
t
(k) = A
1
(t)
k
1
+A
2
(t)
k
2
En termes des deux derni`eres valeurs observees X
t
et X
t1
, quand
1
=
2
, les previsions sont
donnees par :
X
t
(k) =
k+1
1
k+1
2
2
X
t
(
k+1
1
2
k+1
2
1
)
2
X
t1
6.4 Le syst`eme Yule Walker pour les correlations
1. Les premi`eres p correlations = ((1), ..., (p)) peuvent etre obtenues du syst`eme reduit ` a p
equations et p inconnues :
R = (36)
ou R est la matrice Toeplitz symmetrique :
R =
_
_
_
_
1 (1) ... (p 1)
(1) 1 ... (p 2)
... ... ... ...
(p 1) (p 2) ... 1
_
_
_
_
2. En suite, pour k > p on utilise la reccurence :
k
=
p
i=1
ki
3. La variance est
0
=
2
1
P
i
i
i
(et en suite, on obtient les covariances par
k
=
k
0
, k > 1).
38
4. Exemple : AR(2) Pour le processus AR(2)
Y
t
=
1
Y
t1
+
2
Y
t2
+
t
avec racines
1
,
2
de 0 =
2
1
2
=
2
(
1
) dedans le cercle unitaire (pour assurer
la causalite), on obtient, en resolvant (36) :
1
=
1
1
2
=
1
+
2
1 +
1
2
,
2
=
2
+
2
1
1
2
, ...
(a) Si les racines
1
,
2
sont distinctes, on obtient
k
=
1
k
1
k
2
k1
1
k1
2
2
Finalement, en utilisant
1
=
1
+
2
,
2
=
1
2
, on arrive ` a
k
=
(1
2
2
)
k+1
1
(1
2
1
)
k+1
2
(
1
2
)(1 +
1
2
)
=
k+1
1
k+1
2
(
1
2
)(1 +
1
2
)
2
1
2
2
k1
1
k1
2
(
1
2
)(1 +
1
2
)
, k 0
en termes de racines seulement.
(b) Dans le cas de racines confondues
i
= , on obtient :
k
=
_
1 +
_
1
2
1 +
2
_
k
_
k
, k 0.
7 Examens dentranement
7.1 Janvier 2005
Examen : 10 Janvier 2005, UPPA, Dept. de Mathematiques
Module : Series temporelles : TMUZ44U
Duree : deux heures
1. Determiner une moyenne mobile causale (B) =
q
i=0
i
B
i
dordre q minimal, qui laisse
passer une tendance quadratique sans distortion et qui enl`eve les composantes saisonni`eres
dordre 4.
2. Soit X
t
=
3
i=0
ti
un processus moyenne mobile, utilise pour lisser un bruit blanc
t
=
BB(0,
2
= 1).
a) Quelle est la variance de X
t
?
b) Trouvez le ltre (i.e. les coecients (
0
,
1
,
2
,
3
)) qui ram`enent ` a un processus X
t
` a va-
riance minimale, parmi toutes les moyennes mobiles dordre 3 qui laissent passer une tendance
ane X
t
= a +bt sans distortion.
3. Stationarite des processus Soit
X
t+1
= X
t
+
t+1
, t = 0, 1, 2, ...,
o` u
t
est bruit blanc Gaussien de distribution N(0,
2
), un processus AR(1) deni seulement
` a partir du temps t = 0. Supposons aussi que X
0
est Gaussien de distribution N(0,
2
0
).
Determinez la valeur de
2
0
qui assure que le processus X
t
est stationnaire.
39
4. Considerez le mod`ele ARIMA(1,1,0)
(1 B)(1 B)X
t
=
t
o` u || < 1 et
t
est bruit blanc Gaussien de distribution N(0, 1).
(a) Donnez une formule de recurrence et ensuite une formule generale pour les coecients
k
de sa representation causale X
t
=
k
k
tk
.
(b) Est-ce que ce processus est stationnaire causal ?
(c) Donner une formule de recurrence et ensuite une formule generale pour les autocorrelations
k
du processus X
t
. Est-ce que
k
k
< ?
(d) Donnez une formule de recurrence et ensuite une formule generale pour la prevision
Box-Jenkins X
t
(k) = E[X(t +k)|X
t
] de X(t +k), k = 0, 1, 2, ...
(e) Trouvez la limite lim
k
X
t
(k).
Solutions :
1. En demandant que (B) =
1+B+B
2
+B
2
3
(a
0
+a
1
B+a
2
B
2
) satisfait (1) = 1,
(1) = 0,
(1) =
0, on trouve : (B) =
1516B+5B
2
4
1+B+B
2
+B
3
4
=
15
16
1
16
B +
4
16
B
2 4
16
B
3
11
16
B
4
+
5
16
B
5
.
2. a) Var X
t
=
2
i
. b) Elle est minimise sous les contraintes
i
= 1,
i
i
i
= 0 par
(7/10, 4/10, 1/10, 2/10).
3.
2
0
=
2
1
2
4. (a) Les coecents (k) satisfont lequation Yule Walker
k
=
1
k1
+
2
k2
avec valeurs initiales
0
= 1,
1
=
1
.
La solution generale de cette recurrence dordre 2, pour valeurs initiales arbitraires x
0
, x
1
et
avec des racines distinctes
1
,
2
, est :
(k) =
k
1
k
2
2
x
1
(
k
1
k
2
1
)
2
x
0
(et avec des racines non-distinctes
1
=
2
= nous avons (k) = k
k1
x
1
+ (1 k
k
x
0
).
Ici, avec
2
= 1, on obtient par cette formule, (avec x
0
= 1, x
1
=
1
) (k) =
k+1
1
1
(et avec
des racines non-distinctes nous avons (k) = (k + 1)
k
).
b) Le processus nest pas stationnaire causal car la racines 1 du polyn ome charact`eristique
nest pas a lexterieur du disque unite.
(c) Pour un processus AR stationnaire X
t
, la fonction dautocorrelation satisfait lequation
Yule Walker
k
=
1
k1
+
2
k2
Pour k = 1 ca donne :
1
=
1
1
2
=
1 +
1 +
= 1
et ensuite
k
= 1. Le seul processus stationnaire Gaussien satisfaisant cette recurrence est
X
t
= X
t1
= ..., quand = 0. Pour = 0, il nexiste pas de processus stationnaire satisfaisant
notre recurrence.
d) Avec la meme recurrence, on arrive ` a :
X
t
(k) =
k+1
1
1
X
t
+
k+1
1
X
t1
40
7.2 Janvier 2006
Examen : 6 Janvier 2006, UPPA, Dept. de Mathematiques
Module : Series temporelles : TMUZ44U
Duree : deux heures
1. Determiner une moyenne mobile causale (B) =
q
i=0
i
B
i
dordre q minimal, qui laisse passer
une tendance lineaire sans distortion et qui enl`eve les composantes saisonni`eres dordre 3.
2. Soit X
t
=
2
i=0
ti
un processus moyenne mobile, utilise pour lisser un bruit blanc
t
=
BB(0,
2
= 1).
a) Quelle est la variance de X
t
?
b) Trouvez le ltre (i.e. les coecients (
0
,
1
,
2
)) qui ram`enent ` a un processus X
t
` a variance
minimale, parmi toutes les moyennes mobiles dordre 2 qui laissent passer une tendance ane
X
t
= a +bt sans distortion.
3. Stationarite des processus Soit X
t
un processus AR(1) deni ` a partir du temps t = 0 :
X
t+1
= X
t
+
t+1
, t = 0, 1, 2, ...,
o` u
t
est bruit blanc Gaussien de distribution N(0,
2
), et X
0
est aussi Gaussien, de distribu-
tion N(0,
2
0
). Determinez la valeur de
2
0
qui assure que le processus X
t
est stationnaire, et
justiez votre reponse.
4. On consid`ere le processus aleatoire suivant :
X
t
= 10 + 0.7 X
t1
0.1 X
t2
+
t
0.5
t1
o` u
t
est BB(0,
2
= 1).
(a) Calculez lesperance de X
t
, en supposant que le processus est stationnaire.
(b) Trouvez un nombre tel que le processus Y
t
= X
t
satisfait une recurrence ARMA(2,1)
Y
t
=
1
Y
t1
+
2
Y
t2
+
0
t
+
1
t1
sans terme constant et precisez quelle est la recurrence obtenue.
(c) Est-ce que le processus Y
t
est causal ? Est-ce quil est inversible ?
(d) Donnez une formule de recurrence et ensuite les premiers trois coecients
j
, j = 0, 1, 2
de la representation comme processus MA() de Y
t
(i.e. Y
t
=
k
k
tk
). Trouvez
aussi une formule generale pour les coecients
j
.
(e) Donnez une formule de recurrence et ensuite les premiers trois coecients
j
, j = 0, 1, 2
de la representation comme processus AR() de Y
t
(i.e.
t
=
k
Y
tk
). Trouvez aussi
une formule generale pour les coecients
j
et precisez si les deux representations sont
convergentes.
(f) Donnez une formule de recurrence pour les previsions Box-Jenkins
Y
t
(k) = E[Y (t +k)|{Y
t
, Y
t1
, ...}], k 2
41
(g) Trouvez une formule pour
Y
t
(1) = E[Y (t+1)|{Y
t
, Y
t1
, ...}] en fonction de {Y
t
, Y
t1
, ...Y
0
}
et des valeurs
0
, Y
1
, Y
2
, ....
Indication : Obtenez une equation contenant Y (t+1), Y (t), ..., Y (0),
t+1
et aucun autre
bruit
i
, i = 1, ..., t, en additionant les equations qui denissent Y (t+1i), i = 0, ..., t+1
multipliees par (
1
)
i
.
Deduisez une formule generale de prevision pour
X
t
(1). Indication : Ignorez les valeurs
0
, Y
1
, Y
2
.
Solutions :
1. Soit f(B) =
1+B+B
2
3
, et donc f(1) = 1, f
(1) = 1. En demandant que (B) = f(B)(a
0
+a
1
B)
satisfait (1) = 1,
(1) = 0, on trouve a
0
+a
1
= 1, a
0
+ 2a
1
= 0 et donc
(B) =
1 +B +B
2
3
(2 B) =
2 +B +B
2
B
3
3
2. a) Var X
t
=
2
i
. b) Elle est minimise sous les contraintes
i
= 1,
i
i
i
= 0 par
(5/6, 2/6, 1/6).
3.
2
0
= EX
2
0
= EX
2
1
= E(
2
1
+ 2
0
X
0
+
2
X
2
0
)
=
2
+ 0 +
2
2
0
=
2
0
=
2
1
2
4. (a) Prenant esperance : m = 10 +.6m m = 25
(b) La serie Y
t
= X
t
25 satisfait
X
t
= 10 +.7 X
t1
.1 X
t2
+
t
.5
t1
ou
t
est BB(0,
2
= 1).
(c) Les racines du symb ole (z) = 1 .7z +.1z
2
= (1 .5z)(1 .2z) sont 2, 5, a lexterieur
du disque unite, donc le processus est causal. La racine du (z) = 1 .5z est 2 donc le
processus est inversible.
(d) Les coecents (k) satisfont lequation Yule Walker
k
=
1
k1
+
2
k2
avec valeurs initiales
0
= 1,
1
=
1
+
1
=
1
+
1
+
2
o` u
1
,
2
sont les racines de
1
2
= 0.
On a
0
= 1,
1
=
1
+
1
,
2
=
2
+
1
1
+
2
1
.
La solution generale de la recurrence dordre 2, pour valeurs initiales arbitraires x
0
, x
1
et avec des racines distinctes
1
,
2
, est :
(k) =
k
1
k
2
2
x
1
(
k
1
k
2
1
)
2
x
0
Ici on obtient par cette formule, (avec x
0
= 1, x
1
=
1
+
1
) (k) =
k+1
1
k+1
2
2
+
1
k
1
k
2
2
x
1
(e) Les coecents (k) satisfont lequation de recurrence
k
=
1
k1
, k > 2
avec valeurs initiales
0
= 1,
1
=
1
1
,
2
=
2
1
=
2
+
1
(
1
+
1
).
La solution de cette recurrence dordre 1
(k) =
k2
1
2
42
(f) Les previsions satisfont pour k 2 la recursion Yule Walker.
(g)
t+1
= Y (t+1)(
1
+
1
)Y (t)+
2
(Y (t1)
1
Y (t2)+...+(
1
)
t1
Y (0)+(
1
)
t1
0
+...
Y
t
(1) = (
1
+
1
)Y (t)
2
_
Y (t 1)
1
Y (t 2) +... + (
1
)
t1
Y
0
_
3. Soit le processus :
(1 .8B +.16B
2
)Y
t
= (1 + B)
t
(a) Est-ce que ce processus est inversible ? Calculez la formule generale des coecients (k)
de la representation du bruit
t
en termes de la serie. Quels sont les premiers quatre
coecients De quel probl`eme on saper coit si le processus nest pas inversible ?
(b) Donnez la prevision un pas en avant
Y
t
(1) qui utilise les trois valeures Y
t
, Y
t1
, Y
t2
, Y
t3
.
(c) Est-ce que ce processus est stationnaire causal ? Si oui, trouvez la fonction dauto-
correlation de Y
t
.
4. Considerons le processus :
(1 B)Y
t
= (1 +
1
B +
2
B
2
)
t
Soit Y
t
(k) la previson de Y
t+k
au temps t.
(a) Trouvez des expressions pour Y
t
(1), Y
t
(2), comme fonctions de Y
t
, Y
t1
,
t
,
t1
. Donnez
une formule de recurrence pour Y
t
(k) pour k 3, et ecrivez ensuite Y
t
(k) comme une
fonction de Y
t
, Y
t1
,
t
,
t1
.
(b) Trouvez des expressions pour Y
t
(1), Y
t
(2), comme fonctions de Y
t
, Y
t1
, Y
t2
, ... en utili-
sant la representation du bruit.
1. (a) Donnez les formules des coecients de correlation
1
,
2
pour un processus MA(1)
X
t
=
t
+
t1
(b) Trouvez les valeurs maximales et minimales de
1
et les valeurs de pour les quelles ces
valeurs sont atteintes.
43
Solutions :
1. (c) Le processus peut secrire Y
t
= (1 +
1
B +
2
B
2
)
t
= (1 +.4B)
2
t
. Il est inversible car la
racine 5/2 est a lexterieur du disque unite. Par identication des coecients on trouve que
1
=
1
,
2
=
2
2
1
,
3
=
3
1
2
2
1
,
4
=
4
1
+ 3
2
2
1
2
2
, ... et alors
Y
t
(1) = Y
t
+
i=1
i
Y
ti
avec
1
= .8, ....
3. (a) Ce processus AR(2) pas centre peut secrire (1.2B.35B
2
)X
t
= (1.7B)(1+.5B)X
t
=
40 +
t
En prenant esperance on trouve E(X
t
) =
40
1.2.35
=
40
.45
.
(b) Le processus est stationnaire causal car les racines du polyn ome sont a lexterieur du
disque unite.
(c) Soit Y
t
= X
t
EX
t
. Alors Y
t
est un processus AR(2) centre satisfaisant (1 .2B
.35B
2
)Y
t
= (1 .7B)(1 +.5B)X
t
=
t
La fonction dautocovariance de Y
t
(qui est la meme que celle de X
t
) est obtenue de lequation :
E(Y
t
Y
th
) = 0.2E(Y
t1
Y
th
) +0.35E(Y
t2
Y
th
) +E(
t
Y
th
), ce qui donne le syt`eme de Yule
Walker :
1
= 0.2 + 0.35
1
2
= 0.2
1
+ 0.35
La premi`ere equation donne
1
=
2
6.5
= .31, et la seconde donne
2
= 0.2
1
+ .35 = .41.
Finallement,
0
=
1
1
P
i
= 2.52.
(d) Les autocorrelations partielles
i
, i = 1, 2, 3 se calculent ` a laide des determinants des
matrices dautocorrelations et sont .31, .35, 0. La troisi`eme autocorrelation est en eet une
erreur darrondissmenet, car le mod`ele AR(p) a les autocorr`elations partielles sont nulles au
del` a du rang p.
7.3 Juin 2006
Examen : 29 Juin 2006, UPPA, Dept. de Mathematiques
Module : Series temporelles : TMUZ44U
Duree : deux heures
1. Determiner une moyenne mobile causale (B) =
q
i=0
i
B
i
dordre q minimal, qui laisse passer
une tendance lineaire sans distortion et qui enl`eve les composantes saisonni`eres dordre 4.
2. (a) Donnez les formules des coecients de correlation
1
,
2
pour un processus MA(1)
X
t
=
t
+
t1
(b) Trouvez les valeurs maximales et minimales de
1
et les valeurs de pour les quelles ces
valeurs sont atteintes.
3. On consid`ere le processus aleatoire suivant :
X
t
= 10 + 0.7 X
t1
0.12 X
t2
+
t
0.5
t1
o` u
t
est BB(0,
2
= 1).
(a) Calculez lesperance de X
t
, en supposant que le processus est stationnaire.
44
(b) Trouvez un nombre tel que le processus Y
t
= X
t
satisfait une recurrence ARMA(2,1)
Y
t
=
1
Y
t1
+
2
Y
t2
+
0
t
+
1
t1
sans terme constant et precisez quelle est la recurrence obtenue.
(c) Est-ce que le processus Y
t
est causal ? Est-ce quil est inversible ?
(d) Donnez une formule de recurrence et ensuite les premiers trois coecients
j
, j = 0, 1, 2
de la representation comme processus MA() de Y
t
(i.e. Y
t
=
k
k
tk
). Trouvez
aussi une formule generale pour les coecients
j
.
(e) Donnez une formule de recurrence et ensuite les premiers trois coecients
j
, j = 0, 1, 2
de la representation comme processus AR() de Y
t
(i.e.
t
=
k
Y
tk
). Trouvez aussi
une formule generale pour les coecients
j
et precisez si les deux representations sont
convergentes.
(f) Donnez une formule de recurrence pour les previsions Box-Jenkins
Y
t
(k) = E[Y (t +k)|{Y
t
, Y
t1
, ...}], k 2
(g) Trouvez une formule pour
Y
t
(1) = E[Y (t+1)|{Y
t
, Y
t1
, ...}] en fonction de {Y
t
, Y
t1
, ...Y
0
}
et des valeurs
0
, Y
1
, Y
2
, ....
Indication : Obtenez une equation contenant Y (t+1), Y (t), ..., Y (0),
t+1
et aucun autre
bruit
i
, i = 1, ..., t, en additionant les equations qui denissent Y (t+1i), i = 0, ..., t+1
multipliees par (
1
)
i
.
Deduisez une formule generale de prevision pour
X
t
(1). Indication : Ignorez les valeurs
0
, Y
1
, Y
2
.
4. Soit Y
t
un processus ARIMA(p,d,q)
(B)(1 B)
d
Y
t
= (B)Z
t
o` u Z
t
est bruit blanc (i.e. un processus stationnaire ` a correlation 0) et (B), (B) sont des
polyn omes dans lop`erateur de retard B ` a ordres p, q et avec coecient libre 1. Considerons
la prevision lineaire Y
t
(k) de Y
t+k
au temps t par une combinaison lineaire de bruit blanc
Z
ti
, i = 0, 1, 2... cest ` a dire,
Y
t
(k) =
i=0
a
i
(k)Z
ti
Soit R
t
(k) = Y
t+k
Y
t
(k) lerreur de prevision et V (k) = E[Y
t+k
Y
t
(k)]
2
sa variance.
(a) Trouvez les coecients a
i
(k) qui minimisent la variance de lerreur : V (k) = E[Y
t+k
Y
t
(k)]
2
Indication : Utiliser le developpement lineaire de Y
t
, i.e. Y
t
= (B)Z
t
avec (B) =
1 +
1
B +
2
B
2
+... Les coecients sont donnes par a
i
(k) =
i+k
, i = 0, 1, .. et lerreur
de prevision peut sexprimer comme : R
t
(k) =
k1
i=0
i
Z
t+ki
, o` u
i
sont les coecients
de...
(b) Trouvez une expression pour V (k), la variance de lerreur de prevision et expliquez
comment V (k) varie avec k pour un processus stationnaire (d = 0) et pour un processus
non stationnaire (d 1)
5. Considerons le processus ARIMA(1,1,2) :
(1 B)(1 B)Y
t
= (1 +
1
B +
2
B
2
)Z
t
o` u 1 < < 1. Soit Y
t
(k) la previson de Y
t+k
au temps t.
(a) Montrez que Y
t
(1) = (1 + )Y
t
Y
t1
+
1
Z
t
+
2
Z
t1
et trouvez les expressions
correspondantes pour Y
t
(2) et Y
t
(k) pour k 3
45
(b) Montrez que la fonction de prevision peut sexprimer sous la forme Y
t
(k) = a
t
+b
t
k
, k
1, et donnez la formule de a
t
, b
t
comme fonctions de Y
t
, Y
t1
, Z
t
, Z
t1
.
Solutions :
1. Soit f(B) =
1+B+B
2
3
, et donc f(1) = 1, f
(1) = 1. En demandant que (B) = f(B)(a
0
+a
1
B)
satisfait (1) = 1,
(1) = 0, on trouve a
0
+a
1
= 1, a
0
+ 2a
1
= 0 et donc
(B) =
1 +B +B
2
3
(2 B) =
2 +B +B
2
B
3
3
2. a) Var X
t
=
2
i
. b) Elle est minimise sous les contraintes
i
= 1,
i
i
i
= 0 par
(5/6, 2/6, 1/6).
3.
2
0
= EX
2
0
= EX
2
1
= E(
2
1
+ 2
0
X
0
+
2
X
2
0
)
=
2
+ 0 +
2
2
0
=
2
0
=
2
1
2
4. (a) Prenant esperance : m = 10 +.6m m = 25
(b) La serie Y
t
= X
t
25 satisfait
X
t
= 10 +.7 X
t1
.1 X
t2
+
t
.5
t1
ou
t
est BB(0,
2
= 1).
(c) Les racines du symb ole (z) = 1 .7z +.1z
2
= (1 .5z)(1 .2z) sont 2, 5, a lexterieur
du disque unite, donc le processus est causal. La racine du (z) = 1 .5z est 2 donc le
processus est inversible.
(d) Les coecents (k) satisfont lequation Yule Walker
k
=
1
k1
+
2
k2
avec valeurs initiales
0
= 1,
1
=
1
+
1
=
1
+
1
+
2
o` u
1
,
2
sont les racines de
1
2
= 0.
On a
0
= 1,
1
=
1
+
1
,
2
=
2
+
1
1
+
2
1
.
La solution generale de la recurrence dordre 2, pour valeurs initiales arbitraires x
0
, x
1
et avec des racines distinctes
1
,
2
, est :
(k) =
k
1
k
2
2
x
1
(
k
1
k
2
1
)
2
x
0
Ici on obtient par cette formule, (avec x
0
= 1, x
1
=
1
+
1
) (k) =
k+1
1
k+1
2
2
+
1
k
1
k
2
2
x
1
(e) Les coecents (k) satisfont lequation de recurrence
k
=
1
k1
, k > 2
avec valeurs initiales
0
= 1,
1
=
1
1
,
2
=
2
1
=
2
+
1
(
1
+
1
).
La solution de cette recurrence dordre 1
(k) =
k2
1
2
(f) Les previsions satisfont pour k 2 la recursion Yule Walker.
(g)
t+1
= Y (t+1)(
1
+
1
)Y (t)+
2
(Y (t1)
1
Y (t2)+...+(
1
)
t1
Y (0)+(
1
)
t1
0
+...
Y
t
(1) = (
1
+
1
)Y (t)
2
_
Y (t 1)
1
Y (t 2) +... + (
1
)
t1
Y
0
_
46
7.4 Examen dentranement 1
2. On consid`ere le processus aleatoire suivant :
X
t
= 20 .4 X
t1
+.12 X
t2
+
t
ou
t
est BB(0,
2
= 1).
(a) Calculer lesperance de X
t
, en supposant que le processus est stationnaire.
(b) Est-ce que le processus est stationnaire causal ?
(c) Donner les equations de Yule-Walker du processus, calculer la variance, ainsi que les 3
premi`eres valeurs des autocorrelations.
(d) Pour un mod`ele non-stationnaire, comment on pourrait detecter la manque de station-
nairite ` a partir des expressions numeriques fournies par les equations de Yule-Walker
pour les autocorrelations ?
(e) Calculer les 3 premi`eres autocorrelations partielles.
3. Soit le processus :
(1 .8B +.16B
2
)Y
t
= (1 + B)
t
(a) Est-ce que ce processus est inversible ? Calculez la formule generale des coecients (k)
de la representation du bruit
t
en termes de la serie. Quels sont les premiers quatre
coecients De quel probl`eme on saper coit si le processus nest pas inversible ?
(b) Donnez la prevision un pas en avant
Y
t
(1) qui utilise les trois valeures Y
t
, Y
t1
, Y
t2
, Y
t3
.
(c) Est-ce que ce processus est stationnaire causal ? Si oui, trouvez la fonction dauto-
correlation de Y
t
.
4. Considerons le processus :
(1 B)Y
t
= (1 +
1
B +
2
B
2
)
t
Soit Y
t
(k) la previson de Y
t+k
au temps t.
(a) Trouvez des expressions pour Y
t
(1), Y
t
(2), comme fonctions de Y
t
, Y
t1
,
t
,
t1
. Donnez
une formule de recurrence pour Y
t
(k) pour k 3, et ecrivez ensuite Y
t
(k) comme une
fonction de Y
t
, Y
t1
,
t
,
t1
.
(b) Trouvez des expressions pour Y
t
(1), Y
t
(2), comme fonctions de Y
t
, Y
t1
, Y
t2
, ... en utili-
sant la representation du bruit.
5. (a) Donnez les formules des coecients de correlation
1
,
2
pour le processus MA(1).
(b) Trouvez les valeurs maximales et minimales de
1
et les valeurs de pour les quelles ces
valeurs sont atteintes.
Solutions :
1. (c) Le processus peut secrire Y
t
= (1 +
1
B +
2
B
2
)
t
= (1 +.4B)
2
t
. Il est inversible car la
racine 5/2 est a lexterieur du disque unite. Par identication des coecients on trouve que
1
=
1
,
2
=
2
2
1
,
3
=
3
1
2
2
1
,
4
=
4
1
+ 3
2
2
1
2
2
, ... et alors
Y
t
(1) = Y
t
+
i=1
i
Y
ti
avec
1
= .8, ....
47
3. (a) Ce processus AR(2) pas centre peut secrire (1.2B.35B
2
)X
t
= (1.7B)(1+.5B)X
t
=
40 +
t
En prenant esperance on trouve E(X
t
) =
40
1.2.35
=
40
.45
.
(b) Le processus est stationnaire causal car les racines du polyn ome sont a lexterieur du
disque unite.
(c) Soit Y
t
= X
t
EX
t
. Alors Y
t
est un processus AR(2) centre satisfaisant (1 .2B
.35B
2
)Y
t
= (1 .7B)(1 +.5B)X
t
=
t
La fonction dautocovariance de Y
t
(qui est la meme que celle de X
t
) est obtenue de lequation :
E(Y
t
Y
th
) = 0.2E(Y
t1
Y
th
) +0.35E(Y
t2
Y
th
) +E(
t
Y
th
), ce qui donne le syt`eme de Yule
Walker :
1
= 0.2 + 0.35
1
2
= 0.2
1
+ 0.35
La premi`ere equation donne
1
=
2
6.5
= .31, et la seconde donne
2
= 0.2
1
+ .35 = .41.
Finallement,
0
=
1
1
P
i
= 2.52.
(d) Les autocorrelations partielles
i
, i = 1, 2, 3 se calculent ` a laide des determinants des
matrices dautocorrelations et sont .31, .35, 0. La troisi`eme autocorrelation est en eet une
erreur darrondissmenet, car le mod`ele AR(p) a les autocorr`elations partielles sont nulles au
del` a du rang p.
7.5 Examen dentranement 2
1. Soit Y
t
un processus ARMA(1,1) veriant lequation Y
t
= 0.5Y
t1
+
t
0.8
t1
, avec
t
un
bruit blanc.
(a) Precisez si le processus est stationnaire, causal et inversible, et calculez sa fonction
dautocovariance.
(b) Trouvez les coecients
j
de sa representation comme processus MA() et les coe-
cients
j
de sa representation comme processus AR() et precisez si ces representations
sont convergentes.
2. Considerons le processus : ARIMA(1,1,2) :
(1 B)(1 B)Y
t
= (1 +
1
B +
2
B
2
)Z
t
o` u 1 < < 1. Soit Y
t
(k) la previson de Y
t+k
au temps t.
(a) Montrez que Y
t
(1) = (1 + )Y
t
Y
t1
+
1
Z
t
+
2
Z
t1
et trouvez une expression
correspondante pour Y
t
(2). Donnez une formule de recurrence pour Y
t
(k) pour k 3.
(b) Montrez que la fonction de prevision Y
t
(k) peut sexprimer sous la forme Y
t
(k) = a
t
+
b
t
k
, et donnez les formules de a
t
, b
t
comme fonctions de Y
t
, Y
t1
, Z
t
, Z
t1
.
3. On consid`ere le processus aleatoire AR(2) suivant :
X
t
= 10 + (.3) X
t1
+.01 X
t2
+
t
ou
t
est BB(0,
2
= 1).
(a) Calculer lesperance de X
t
, en supposant que le processus est stationnaire.
(b) Est-ce que le processus est stationnaire causal ?
(c) Donner les equations de Yule-Walker du processus, calculer la variance, ainsi que les 3
premi`eres valeurs des autocorrelations.
48
(d) Pour un mod`ele non-stationnaire, comment on pourrait detecter la manque de station-
nairite ` a partir des expressions numeriques fournies par les equations de Yule-Walker
pour les autocorrelations ?
(e) Calculer les 3 premi`eres autocorrelations partielles.
4. Processus ARMA(2, 1) Soit le processus :
(1 B +.25B
2
)Y
t
= (1 + B)Z
t
(a) Est-ce que ce processus est stationnaire causal ? Si oui, trouvez la fonction dauto-
correlation de Y
t
.
(b) Est-ce que ce processus est inversible ? Calculez les premiers cinq coecients de la re-
presentation du bruit Z
t
en termes de la serie. De quel probl`eme on saper coit si le
processus Y
t
nest pas inversible ?
(c) Donnez, si possible, une m`ethode de prevision pour un processus (i) causal et noninver-
sible (ii) noncausal et inversible.
(d) Donnez la prevision un pas en avant
Y
t
(1) en fonction des valeurs passees Y
t
, Y
t1
, ....
5. Considerons le processus : ARIMA(1,1,2) :
(1 B)(1 B)Y
t
= (1 +
1
B +
2
B
2
)Z
t
o` u 1 < < 1. Soit Y
t
(k) la previson de Y
t+k
au temps t.
(a) Montrez que Y
t
(1) = (1 + )Y
t
Y
t1
+
1
Z
t
+
2
Z
t1
et trouvez une expression
correspondante pour Y
t
(2). Donnez une formule de recurrence pour Y
t
(k) pour k 3.
(b) Montrez que la fonction de prevision Y
t
(k) peut sexprimer sous la forme Y
t
(k) = a
t
+
b
t
k
, et donnez les formules de a
t
, b
t
comme fonctions de Y
t
, Y
t1
, Z
t
, Z
t1
.
6. On consid`ere la serie suivante :
t
i
1 2 3 4 5 6 7 8 9 10
y
i
8 4 13 15 18 15 19 19 20 28
a) Representer graphiquement cette serie.
b) On se propose dajuster une droite de regression
f(t) = a t +b
de moindre carrees. Determiner les coecients a et b.
c) Quel est le point le plus eloigne de f(t) ?.
c) Calculez une droite de regression f(t) en imposant b 6.
7. On consid`ere une serie (y
i
, 1 i n) periodique, de periode p. On suppose que le nombre
dobservations n est un multiple de p : n = Lp. Calculez les correlations empiriques :
(p), ; (2p), ; . . . ; (jp) . . .
en utilisant la denition des correlations empiriques :
(k) =
1
nk
nk
i=1
(y
i
y)(y
i+k
y)
1
n
n
i=1
(y
i
y)
2
=
nk
i=1
(y
i
y)(y
i+k
y)
n
i=1
(y
i
y)
2
o` u y = (
n
i=1
y
i
) /n est la moyenne de lensemble de la serie (y
i
, 1 i n).
Commentez sur le resultat.
8. Quelle est la limite lim
k
X
t
(k) de la prevision lineaire dun processus ARMA (p,q) ?
Solutions :
49
1. (c) Le processus peut secrire Y
t
= (1 +
1
B +
2
B
2
)Z
t
= (1 + .4B)
2
Z
t
. Il est inversible car
la racine 5/2 est a lexterieur du disque unite. Par identication des coecients on trouve
que
1
=
1
,
2
=
2
2
1
,
3
=
3
1
2
2
1
,
4
=
4
1
+ 3
2
2
1
2
2
, ... et alors
Y
t
(1) = Y
t
+
i=1
i
Y
ti
avec
1
= .8, ....
7.6 Examen 3
1. Soit le processus :
(1 B +.25B
2
)Y
t
= (1 + B)Z
t
(a) Est-ce que ce processus est stationnaire causal ? Si oui, trouvez la fonction dauto-
correlation de Y
t
.
(b) Est-ce que ce processus est inversible ? Calculez les premiers cinq coecients de la re-
presentation du bruit Z
t
en termes de la serie. De quel probl`eme on saper coit si le
processus Y
t
nest pas inversible ?
(c) Donnez, si possible, une m`ethode de prevision pour un processus (i) causal et noninver-
sible (ii) noncausal et inversible.
(d) Donnez la prevision un pas en avant
Y
t
(1) en fonction des valeurs passees Y
t
, Y
t1
, ....
2. Soit Y
t
un processus ARMA(2,1) veriant lequation Y
t
= 0.7Y
t1
0.1Y
t2
+
t
2
t1
, avec
t
un bruit blanc.
(a) Precisez si le processus est stationnaire, causal et inversible, et calculez sa fonction
dautocovariance.
(b) Trouvez les coecients
j
de sa representation comme processus MA() et les coe-
cients
j
de sa representation comme processus AR() et precisez si ces representations
sont convergentes.
3. Prevision du mod`ele ARIMA(1,2,0) (1 B)(1 B)
2
X
t
=
t
.
(a) Trouvez la forme de la prevision Box-Jenkins X
t
(k) de X
t
et les poids des points pivotales
X
t
, X
t1
, X
t2
.
(b) Trouvez la limite lim
k
X
t
(k).
(c) Calculez les coecients
k
de lexpansion causale de ce processus.
4. Calculer la fonction dautocovariance
k
= EY
n+k
Y
t
n
du processus ` a valeurs en R
2
:
Y
n
=
_
a
0
n
+a
1
n1
b
1
n1
+b
2
n2
_
o` u
n
est un bruit blanc standard.
5. Stationarite des processus
Investiguer si les processus suivants sont stationnaires de second ordre, en calculant leurs
characteristiques statistiques de premier et second ordre (moyennes, variances, covariances).
On convient de noter par {
t
} le bruit blanc.
(a) Y
t
=
t
+
1
t1
(MA(1))
(b) Y
t
= Y
t1
+ +
t
(marche aleatoire avec tendance)
(c) Y
t
= Y
t1
+ +
t
( = 1) (AR(1) avec tendance)
50
6. Processus AR(2) On consid`ere le processus aleatoire AR(2) suivant :
X
t
= 10 + (.3) X
t1
+.01 X
t2
+
t
ou
t
est BB(0,
2
= 1).
(a) Calculer lesperance de X
t
, en supposant que le processus est stationnaire.
(b) Est-ce que le processus est stationnaire causal ?
(c) Donner la recursion de Yule-Walker pour les previsions
X(t + k|t) du processus, et
resolvez la en termes des valeurs pivotales X
t
, X
t1
.
Memes questions pour
(1 B +.25B
2
)X
t
=
t
7. Processus ARMA(2, 1)
Soit le processus :
(1 .6B +.08B
2
)Y
t
= (1 + B)
t
(a) Est-ce que ce processus est stationnaire causal ? Si oui, obtenez la representation
du Y
t
par rapport au bruit Z
t
.
(b) Sous quelles conditions est ce processus inversible ? Obtenez la representation du
bruit Z
t
en termes de la serie. De quel probl`eme on saper coit si le processus nest pas
inversible ?
(c) Donnez la prevision k pas en avant
Y
t
(k), en utilisant les valeurs Y
t
, Y
t1
,
t
.
8. Montrez que pour ARIMA(1,2,0),
k
= {
k+2
+ (1 2) +k(1 )}(1 )
2
, k 0
2. On consid`ere le processus aleatoire suivant :
X
t
= 20 .4 X
t1
+.12 X
t2
+
t
ou
t
est BB(0,
2
= 1).
(a) Calculer lesperance de X
t
, en supposant que le processus est stationnaire.
(b) Est-ce que le processus est stationnaire causal ?
(c) Donner les equations de Yule-Walker du processus, calculer la variance, ainsi que les 3
premi`eres valeurs des autocorrelations.
(d) Pour un mod`ele non-stationnaire, comment on pourrait detecter la manque de station-
nairite ` a partir des expressions numeriques fournies par les equations de Yule-Walker
pour les autocorrelations ?
(e) Calculer les 3 premi`eres autocorrelations partielles.
3. Soit le processus :
(1 .8B +.16B
2
)Y
t
= (1 + B)
t
(a) Est-ce que ce processus est inversible ? Calculez la formule generale des coecients (k)
de la representation du bruit
t
en termes de la serie. Quels sont les premiers quatre
coecients De quel probl`eme on saper coit si le processus nest pas inversible ?
(b) Donnez la prevision un pas en avant
Y
t
(1) qui utilise les trois valeures Y
t
, Y
t1
, Y
t2
, Y
t3
.
(c) Est-ce que ce processus est stationnaire causal ? Si oui, trouvez la fonction dauto-
correlation de Y
t
.
51
4. Considerons le processus :
(1 B)Y
t
= (1 +
1
B +
2
B
2
)
t
Soit Y
t
(k) la previson de Y
t+k
au temps t.
(a) Trouvez des expressions pour Y
t
(1), Y
t
(2), comme fonctions de Y
t
, Y
t1
,
t
,
t1
. Donnez
une formule de recurrence pour Y
t
(k) pour k 3, et ecrivez ensuite Y
t
(k) comme une
fonction de Y
t
, Y
t1
,
t
,
t1
.
(b) Trouvez des expressions pour Y
t
(1), Y
t
(2), comme fonctions de Y
t
, Y
t1
, Y
t2
, ... en utili-
sant la representation du bruit.
5. (a) Donnez les formules des coecients de correlation
1
,
2
pour le processus MA(1).
(b) Trouvez les valeurs maximales et minimales de
1
et les valeurs de pour les quelles ces
valeurs sont atteintes.
9. Montrez que pour ARIMA(1,2,0),
k
= {
k+2
+ (1 2) +k(1 )}(1 )
2
, k 0
3. Soit le processus :
(1 .8B +.16B
2
)Y
t
= (1 + B)
t
(a) Est-ce que ce processus est inversible ? Calculez la formule generale des coecients (k)
de la representation du bruit
t
en termes de la serie. Quels sont les premiers quatre
coecients De quel probl`eme on saper coit si le processus nest pas inversible ?
(b) Donnez la prevision un pas en avant
Y
t
(1) qui utilise les trois valeures Y
t
, Y
t1
, Y
t2
, Y
t3
.
(c) Est-ce que ce processus est stationnaire causal ? Si oui, trouvez la fonction dauto-
correlation de Y
t
.
4. Considerons le processus :
(1 B)Y
t
= (1 +
1
B +
2
B
2
)
t
Soit Y
t
(k) la previson de Y
t+k
au temps t.
(a) Trouvez des expressions pour Y
t
(1), Y
t
(2), comme fonctions de Y
t
, Y
t1
,
t
,
t1
. Donnez
une formule de recurrence pour Y
t
(k) pour k 3, et ecrivez ensuite Y
t
(k) comme une
fonction de Y
t
, Y
t1
,
t
,
t1
.
(b) Trouvez des expressions pour Y
t
(1), Y
t
(2), comme fonctions de Y
t
, Y
t1
, Y
t2
, ... en utili-
sant la representation du bruit.
5. (a) Donnez les formules des coecients de correlation
1
,
2
pour le processus MA(1).
(b) Trouvez les valeurs maximales et minimales de
1
et les valeurs de pour les quelles ces
valeurs sont atteintes.
Solutions :
1. (c) Le processus peut secrire Y
t
= (1 +
1
B +
2
B
2
)
t
= (1 +.4B)
2
t
. Il est inversible car la
racine 5/2 est a lexterieur du disque unite. Par identication des coecients on trouve que
1
=
1
,
2
=
2
2
1
,
3
=
3
1
2
2
1
,
4
=
4
1
+ 3
2
2
1
2
2
, ... et alors
Y
t
(1) = Y
t
+
i=1
i
Y
ti
avec
1
= .8, ....
52
3. (a) Ce processus AR(2) pas centre peut secrire (1.2B.35B
2
)X
t
= (1.7B)(1+.5B)X
t
=
40 +
t
En prenant esperance on trouve E(X
t
) =
40
1.2.35
=
40
.45
.
(b) Le processus est stationnaire causal car les racines du polyn ome sont a lexterieur du
disque unite.
(c) Soit Y
t
= X
t
EX
t
. Alors Y
t
est un processus AR(2) centre satisfaisant (1 .2B
.35B
2
)Y
t
= (1 .7B)(1 +.5B)X
t
=
t
La fonction dautocovariance de Y
t
(qui est la meme que celle de X
t
) est obtenue de lequation :
E(Y
t
Y
th
) = 0.2E(Y
t1
Y
th
) +0.35E(Y
t2
Y
th
) +E(
t
Y
th
), ce qui donne le syt`eme de Yule
Walker :
1
= 0.2 + 0.35
1
2
= 0.2
1
+ 0.35
La premi`ere equation donne
1
=
2
6.5
= .31, et la seconde donne
2
= 0.2
1
+ .35 = .41.
Finallement,
0
=
1
1
P
i
= 2.52.
(d) Les autocorrelations partielles
i
, i = 1, 2, 3 se calculent ` a laide des determinants des
matrices dautocorrelations et sont .31, .35, 0. La troisi`eme autocorrelation est en eet une
erreur darrondissmenet, car le mod`ele AR(p) a les autocorr`elations partielles sont nulles au
del` a du rang p.
Solutions :
1. (c) Le processus peut secrire Y
t
= (1 +
1
B +
2
B
2
)
t
= (1 +.4B)
2
t
. Il est inversible car la
racine 5/2 est a lexterieur du disque unite. Par identication des coecients on trouve que
1
=
1
,
2
=
2
2
1
,
3
=
3
1
2
2
1
,
4
=
4
1
+ 3
2
2
1
2
2
, ... et alors
Y
t
(1) = Y
t
+
i=1
i
Y
ti
avec
1
= .8, ....
3. (a) Ce processus AR(2) pas centre peut secrire (1.2B.35B
2
)X
t
= (1.7B)(1+.5B)X
t
=
40 +
t
En prenant esperance on trouve E(X
t
) =
40
1.2.35
=
40
.45
.
(b) Le processus est stationnaire causal car les racines du polyn ome sont a lexterieur du
disque unite.
(c) Soit Y
t
= X
t
EX
t
. Alors Y
t
est un processus AR(2) centre satisfaisant (1 .2B
.35B
2
)Y
t
= (1 .7B)(1 +.5B)X
t
=
t
La fonction dautocovariance de Y
t
(qui est la meme que celle de X
t
) est obtenue de lequation :
E(Y
t
Y
th
) = 0.2E(Y
t1
Y
th
) +0.35E(Y
t2
Y
th
) +E(
t
Y
th
), ce qui donne le syt`eme de Yule
Walker :
1
= 0.2 + 0.35
1
2
= 0.2
1
+ 0.35
La premi`ere equation donne
1
=
2
6.5
= .31, et la seconde donne
2
= 0.2
1
+ .35 = .41.
Finallement,
0
=
1
1
P
i
= 2.52.
(d) Les autocorrelations partielles
i
, i = 1, 2, 3 se calculent ` a laide des determinants des
matrices dautocorrelations et sont .31, .35, 0. La troisi`eme autocorrelation est en eet une
erreur darrondissmenet, car le mod`ele AR(p) a les autocorr`elations partielles sont nulles au
del` a du rang p.
53
Vous aimerez peut-être aussi
- L'apprentissage de La Lecture Et Ses Difficultés-2021Document323 pagesL'apprentissage de La Lecture Et Ses Difficultés-2021Krarzia Mohamed100% (3)
- Langage CDocument238 pagesLangage Cniko100% (11)
- Réaliser Votre: Étude de MarchéDocument218 pagesRéaliser Votre: Étude de MarchéQov RazPas encore d'évaluation
- Surete de FonctionnementDocument49 pagesSurete de Fonctionnementdali2207100% (2)
- Analyse MathématiqueDocument236 pagesAnalyse Mathématiquemaximin100% (3)
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- Introduction à l’analyse des données de sondage avec SPSS : Guide d’auto-apprentissageD'EverandIntroduction à l’analyse des données de sondage avec SPSS : Guide d’auto-apprentissagePas encore d'évaluation
- MethNumII 25fevrier2019Document103 pagesMethNumII 25fevrier2019Mahamat NourPas encore d'évaluation
- Cours, TP SASDocument358 pagesCours, TP SASanibelsoulPas encore d'évaluation
- MethNumII 14janvier2019Document103 pagesMethNumII 14janvier2019Ayoub AdPas encore d'évaluation
- Optimisation1 PDFDocument169 pagesOptimisation1 PDFAnass ChàhmîPas encore d'évaluation
- Modèles de Prévision Séries Temporelles Arthur CharpentierDocument196 pagesModèles de Prévision Séries Temporelles Arthur CharpentierDirumil0% (1)
- Cours de Series TemporellesDocument178 pagesCours de Series TemporellesZeroualiBilelPas encore d'évaluation
- Enseigner Situation ProblemeDocument25 pagesEnseigner Situation ProblemeTakoua Amiri100% (2)
- Cours Asservissement Part 1Document86 pagesCours Asservissement Part 1Yayoune Kholio100% (3)
- Statistique SDocument297 pagesStatistique SskynetoPas encore d'évaluation
- ExamDocument2 pagesExamanibelsoul100% (1)
- Structure de La Matière CondenséeDocument242 pagesStructure de La Matière CondenséeBilouBB100% (2)
- 445 Poly09Document129 pages445 Poly09BestCourse4u.comPas encore d'évaluation
- Dorsalgie Et GrossesseDocument45 pagesDorsalgie Et GrossesseazePas encore d'évaluation
- C Algo ProgDocument137 pagesC Algo ProgIssiaka DaoPas encore d'évaluation
- TsDocument178 pagesTsAdel RoPas encore d'évaluation
- UqamtsDocument196 pagesUqamtsAdama DiawaraPas encore d'évaluation
- Cours de Series Temporelles Theorie Et ApplicationsDocument178 pagesCours de Series Temporelles Theorie Et ApplicationsHelali KamelPas encore d'évaluation
- Master 1 MMD - Séries Temporelles (Paris-Dauphine)Document196 pagesMaster 1 MMD - Séries Temporelles (Paris-Dauphine)L.CamoPas encore d'évaluation
- Series Temp RDocument111 pagesSeries Temp RHervé MUKADIPas encore d'évaluation
- SERIES - TEMPORELLES - PDF 2 PDFDocument141 pagesSERIES - TEMPORELLES - PDF 2 PDFmeone9950% (2)
- M1 Poly PDFDocument83 pagesM1 Poly PDFChaima ChPas encore d'évaluation
- 2004 Lafourcade PascalDocument112 pages2004 Lafourcade PascalThanh Hai NguyenPas encore d'évaluation
- LecturenotesDocument80 pagesLecturenotesfle92Pas encore d'évaluation
- Cours SC PDFDocument153 pagesCours SC PDFMohamed RdaitPas encore d'évaluation
- Poly RO FSurDocument78 pagesPoly RO FSurEric TraorePas encore d'évaluation
- L3 Algorithmique AlgoDocument59 pagesL3 Algorithmique AlgoZorbs RolandPas encore d'évaluation
- Poly Math NumDocument121 pagesPoly Math NumMohamed KobeissiPas encore d'évaluation
- Optimisation1 Chap8Document61 pagesOptimisation1 Chap8Mohamed TahriPas encore d'évaluation
- Cours Python PDFDocument130 pagesCours Python PDFDriss AlaouiPas encore d'évaluation
- Systemes DynamiquesDocument72 pagesSystemes DynamiquesEmma DjomoPas encore d'évaluation
- Cours Analyse de DonneesDocument144 pagesCours Analyse de DonneesOMAR0% (1)
- Table Des Mati'eres: Support de CoursDocument67 pagesTable Des Mati'eres: Support de Coursmehdi mehalilPas encore d'évaluation
- CoursDocument101 pagesCoursrachidPas encore d'évaluation
- Poly RO FSurDocument108 pagesPoly RO FSurZiedZiednPas encore d'évaluation
- PHQ404 0Document195 pagesPHQ404 0Abdelkrim OukerroumPas encore d'évaluation
- Poly RO FSurDocument102 pagesPoly RO FSurAregia OviPas encore d'évaluation
- Series Chrono L3 PDFDocument52 pagesSeries Chrono L3 PDFHicham AlliPas encore d'évaluation
- Analyse Quantitatives de RéseauxDocument220 pagesAnalyse Quantitatives de Réseauxandycole8919100% (1)
- Meth NumDocument79 pagesMeth NumCapitno PhilipPas encore d'évaluation
- Résume + Cours IPT MPDocument35 pagesRésume + Cours IPT MPYasser El hattabiPas encore d'évaluation
- Cours ST 2010Document52 pagesCours ST 2010Ismail OuaadiPas encore d'évaluation
- Cours SDF OneraDocument49 pagesCours SDF OneraOthman Nasri100% (1)
- Cours PS FGI 3Document56 pagesCours PS FGI 3rodriguePas encore d'évaluation
- Hemsas, OuahibaDocument58 pagesHemsas, OuahibaALLAPas encore d'évaluation
- Crypto M1 2017Document51 pagesCrypto M1 2017Me RePas encore d'évaluation
- Cours PythonpdfDocument142 pagesCours PythonpdfIzida OziPas encore d'évaluation
- Meth VariaDocument157 pagesMeth VariaDjï Djã BrahmiPas encore d'évaluation
- RuizDocument145 pagesRuizRUHAN PONCEPas encore d'évaluation
- FourierDocument48 pagesFourierSimplicePas encore d'évaluation
- Analyse de Series ChronologiquesDocument47 pagesAnalyse de Series Chronologiqueslinamerrouki000Pas encore d'évaluation
- Ait Youcef, MalhaDocument70 pagesAit Youcef, MalhaAhmed FenneurPas encore d'évaluation
- I - Langage - CDocument238 pagesI - Langage - CPekoJhames08gmail.comPas encore d'évaluation
- NAOUAI Mohamed 2013 ED413Document262 pagesNAOUAI Mohamed 2013 ED413nada kobiPas encore d'évaluation
- Régression Sous SASDocument144 pagesRégression Sous SASanibelsoulPas encore d'évaluation
- Analyse Numérique Exercices InterpolationDocument3 pagesAnalyse Numérique Exercices Interpolationanibelsoul100% (1)
- Ponts Cours A4 NBDocument139 pagesPonts Cours A4 NBAnas HamidPas encore d'évaluation
- Efficience Des Marchés (10) OkDocument31 pagesEfficience Des Marchés (10) OkBadal SamuelPas encore d'évaluation
- Séances 8 9 Et 10 s3 Echantillonnage Et Estimation PR Smouni Dec 2020Document14 pagesSéances 8 9 Et 10 s3 Echantillonnage Et Estimation PR Smouni Dec 2020abdelmoutalebPas encore d'évaluation
- DEVENIR INGENIEUR - Présentation Des Étudiants de PolytechniqueDocument18 pagesDEVENIR INGENIEUR - Présentation Des Étudiants de PolytechniquegabrielfaimaliPas encore d'évaluation
- TBD Et RHDocument65 pagesTBD Et RHHanane BouisskranePas encore d'évaluation
- These - 3 Sur L'essai de Fatigue Sur Les EnrobésDocument314 pagesThese - 3 Sur L'essai de Fatigue Sur Les EnrobésSerge BillPas encore d'évaluation
- Chapitre II Estimation Des Paramètres Des Lois de Probabilité 2022-23Document15 pagesChapitre II Estimation Des Paramètres Des Lois de Probabilité 2022-23mastech m1Pas encore d'évaluation
- 1.méthodes de Sondage & Sources D'info-1Document54 pages1.méthodes de Sondage & Sources D'info-1maryeme amkarPas encore d'évaluation
- Seance6 Arbres SuiteDocument63 pagesSeance6 Arbres SuiteKenfack TatianaPas encore d'évaluation
- Détecteur de Gaz SWP 2Document1 pageDétecteur de Gaz SWP 2Olivier MPas encore d'évaluation
- Bioéquivalence Des Médicaments GénériquesDocument3 pagesBioéquivalence Des Médicaments GénériquesAbdelkarim BelkebirPas encore d'évaluation
- Politique Des Produits Generiques en FranceDocument101 pagesPolitique Des Produits Generiques en FranceYoussef Es-saoudi0% (1)
- Diagnostics Et Objectifs PDFDocument8 pagesDiagnostics Et Objectifs PDFKawtar KaPas encore d'évaluation
- ESA Bulletin 004Document80 pagesESA Bulletin 004Wolfgang KagermeierPas encore d'évaluation