Vous aimerez peut-être aussi
- Flammarion Camille - La Précession Des ÉquinoxesDocument95 pagesFlammarion Camille - La Précession Des ÉquinoxesFrançois Xavier BLASCO100% (1)
- S04 Manoeuvres Orbitales PDFDocument24 pagesS04 Manoeuvres Orbitales PDFNico JuarezPas encore d'évaluation
- Formulaire de Cours La Gravitation Universelle EL-1Document5 pagesFormulaire de Cours La Gravitation Universelle EL-1SALAH EDDINE SBAIPas encore d'évaluation
- Longitude Latitude: Exercices.: Prénom: ...................... 6èmeDocument5 pagesLongitude Latitude: Exercices.: Prénom: ...................... 6èmeصانع تكنلوجياPas encore d'évaluation
- Exercices - Latitude Et LongitudeDocument4 pagesExercices - Latitude Et LongitudeValine LeesPas encore d'évaluation
- TIPEeclipses Antoine THIBAULTDocument59 pagesTIPEeclipses Antoine THIBAULTMawie Lannou100% (1)
- 2-Mécanique SpatialeDocument43 pages2-Mécanique Spatialenicolas.meyers776050% (2)
- ChII - Rayonnement Solaire Hors Atmosphã ReDocument36 pagesChII - Rayonnement Solaire Hors Atmosphã ReMAS FATALPas encore d'évaluation
- Canevas MeridienneDocument3 pagesCanevas Meridiennejaafar ameyerPas encore d'évaluation
- BarycentreDocument3 pagesBarycentreSerigne Saliou DioufPas encore d'évaluation
- Système de Coordonnées ÉquatorialesDocument4 pagesSystème de Coordonnées ÉquatorialesAramis MousquetayrePas encore d'évaluation
- Résumé Barycentre 1bacDocument2 pagesRésumé Barycentre 1bacjilalixmcPas encore d'évaluation
- 1sm Barycentrecourexe CorrDocument9 pages1sm Barycentrecourexe Corrabdelkrim chetouaniPas encore d'évaluation
- Corr Serie Le Barycentre 1 BAC S WWW - EtudeDocument11 pagesCorr Serie Le Barycentre 1 BAC S WWW - EtudeBelkhayaly MedayoubPas encore d'évaluation
- S2 Barycentre 2nd WWW - Axloutoth.snDocument3 pagesS2 Barycentre 2nd WWW - Axloutoth.snndourdiegane814Pas encore d'évaluation
- AC TP Starfinder PDFDocument2 pagesAC TP Starfinder PDFDjouadi BilalPas encore d'évaluation
- Mecanik BinetDocument4 pagesMecanik BinetMouhamed SallPas encore d'évaluation
- c1 Sol Rep 19 20 PDFDocument4 pagesc1 Sol Rep 19 20 PDFSouleymane BeybaPas encore d'évaluation
- Orbite HeliosynchroneDocument14 pagesOrbite HeliosynchroneYann LebalmePas encore d'évaluation
- Calculs SolairesDocument6 pagesCalculs SolairesAlfredho ShactarPas encore d'évaluation
- NavAstronomique CoursDocument12 pagesNavAstronomique Courssailor21316100% (1)
- C11Phy Mouvements Plans PDFDocument5 pagesC11Phy Mouvements Plans PDFAzizElheniPas encore d'évaluation
- Le Barycentre Dans Le Plan Serie D Exercices 1Document6 pagesLe Barycentre Dans Le Plan Serie D Exercices 1Zo Zo100% (2)
- Barycentre ExercicesDocument9 pagesBarycentre ExercicesNour HamzaPas encore d'évaluation
- Sirius Et Le Cycle SothiaqueDocument11 pagesSirius Et Le Cycle SothiaquePaula VeigaPas encore d'évaluation
- Dictionnaire Villages de La LekieDocument75 pagesDictionnaire Villages de La Lekiephilatine04Pas encore d'évaluation
- Dictionnaire Des Villages Du Wouri: Centre OrstomDocument28 pagesDictionnaire Des Villages Du Wouri: Centre OrstomMarcien TsasPas encore d'évaluation
- BarycentreDocument5 pagesBarycentreFadilou CisséPas encore d'évaluation
- Comment Le Jour Et La Nuit PDFDocument12 pagesComment Le Jour Et La Nuit PDFNoree YvonPas encore d'évaluation
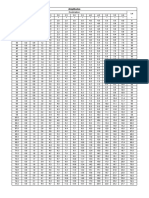
- Amplitude TablesDocument4 pagesAmplitude TablesthugsdeiPas encore d'évaluation
- Semer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumeD'EverandSemer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumePas encore d'évaluation
- Saturne: Les Grands Articles d'UniversalisD'EverandSaturne: Les Grands Articles d'UniversalisPas encore d'évaluation
- LES MESSAGERS DE L'AUBE: Enseignements de notre famille de Lumière des PléiadesD'EverandLES MESSAGERS DE L'AUBE: Enseignements de notre famille de Lumière des PléiadesPas encore d'évaluation
- L'Art de La Magie au Bougie Wicca: Le Guide du Débutant à la Pratique de la Magie au Bougie de WiccaD'EverandL'Art de La Magie au Bougie Wicca: Le Guide du Débutant à la Pratique de la Magie au Bougie de WiccaÉvaluation : 3 sur 5 étoiles3/5 (1)
- Le Big Bang: Une Théorie Basée sur une Physique Invalide et des Mathématiques Erronées.D'EverandLe Big Bang: Une Théorie Basée sur une Physique Invalide et des Mathématiques Erronées.Pas encore d'évaluation
- Les piliers du destin: La chronomancie expression de la vision chinoise du mondeD'EverandLes piliers du destin: La chronomancie expression de la vision chinoise du mondeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Astrologie Médicale Et Psycho-Émotionnelle: Comment acquérir la parfaite maîtrise de vous-mêmeD'EverandAstrologie Médicale Et Psycho-Émotionnelle: Comment acquérir la parfaite maîtrise de vous-mêmeÉvaluation : 1 sur 5 étoiles1/5 (1)
- La Nouvelle Humanité: Hercolabe le destructeur & La Planète sanctuaireD'EverandLa Nouvelle Humanité: Hercolabe le destructeur & La Planète sanctuairePas encore d'évaluation