Vous aimerez peut-être aussi
- Etudes Marketing Avec Spss PDFDocument2 pagesEtudes Marketing Avec Spss PDFCarl0% (2)
- Cours 02 - Conteneurs & Codecs VidéosDocument8 pagesCours 02 - Conteneurs & Codecs VidéosdizmillsPas encore d'évaluation
- Projet Elastix Licence PDFDocument12 pagesProjet Elastix Licence PDFLipouki Tindame100% (2)
- Ue 344865282Document25 pagesUe 344865282WarrenPas encore d'évaluation
- Power BI Training EISTIDocument60 pagesPower BI Training EISTIDimitri Tibati100% (1)
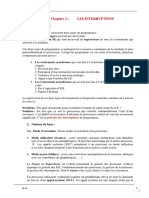
- Chapitreiiiinterruptions 140504153211 Phpapp01Document43 pagesChapitreiiiinterruptions 140504153211 Phpapp01Ahmed TriguiPas encore d'évaluation
- 3 - Mécanismes de BaseDocument35 pages3 - Mécanismes de BaseWided TouhamiPas encore d'évaluation
- Mécanismes de Base D'exécution DesDocument27 pagesMécanismes de Base D'exécution DespenkablessingPas encore d'évaluation
- Chapitre 2 Les InterruptionsDocument10 pagesChapitre 2 Les Interruptionsمصعب مصعبPas encore d'évaluation
- Le Pic 8259 Chap3-4Document25 pagesLe Pic 8259 Chap3-4api-3725139Pas encore d'évaluation
- Architecture Des Ordinateurs8interruptionsDocument31 pagesArchitecture Des Ordinateurs8interruptionsOumaima ZiatPas encore d'évaluation
- Chapitre 5Document14 pagesChapitre 5Rottina RossyPas encore d'évaluation
- Fonctionnement DDocument14 pagesFonctionnement DAissam EL Ibrahimi BouayadPas encore d'évaluation
- Interrupt 1Document10 pagesInterrupt 1Mohamed LarbiPas encore d'évaluation
- InterruptionDocument28 pagesInterruptionbellali badrePas encore d'évaluation
- 1 Architecture - OrdinateurDocument23 pages1 Architecture - OrdinateurYàs SérPas encore d'évaluation
- Interruption HC12Document16 pagesInterruption HC12Youssef YoussefPas encore d'évaluation
- Les InterruptionsDocument19 pagesLes InterruptionsloirdighiPas encore d'évaluation
- Interuption Du 80861Document35 pagesInteruption Du 80861bellali badrePas encore d'évaluation
- Chapitre III Interruptions 4x1Document11 pagesChapitre III Interruptions 4x1사라SaraPas encore d'évaluation
- Cours 6 - PrintDocument20 pagesCours 6 - PrintRigobert DuconPas encore d'évaluation
- Cours04 InterruptionDocument19 pagesCours04 InterruptionanyzonnPas encore d'évaluation
- TP1 - InterruptionsDocument11 pagesTP1 - InterruptionsNesrine BerrahmounePas encore d'évaluation
- Les Interruptions Du MicroprocesseurDocument11 pagesLes Interruptions Du MicroprocesseurRima ChemloulPas encore d'évaluation
- C3 IrqDocument16 pagesC3 IrqNacim AguenarousPas encore d'évaluation
- Chapitre 02 OfficialDocument66 pagesChapitre 02 Officialsabri rabiePas encore d'évaluation
- Le Fonctionnement en InterruptionDocument2 pagesLe Fonctionnement en Interruptiondriss chakdaliPas encore d'évaluation
- CH 05 - Gestion Des Interruptions - IRT - 21Document37 pagesCH 05 - Gestion Des Interruptions - IRT - 21Toutou KHATRIPas encore d'évaluation
- Chapitre 3 Gestion Des Entres Sorties Interruptions - Partie2Document8 pagesChapitre 3 Gestion Des Entres Sorties Interruptions - Partie2Nouzha BoukoubaPas encore d'évaluation
- Chapitre 6 InterruptionDocument11 pagesChapitre 6 Interruptionfatima zahra benmeriemePas encore d'évaluation
- Interruptions 6809Document21 pagesInterruptions 6809Abdel JalilPas encore d'évaluation
- Interruptions 8086Document26 pagesInterruptions 8086Nadhira AdjPas encore d'évaluation
- Le Fonctionnement en Interruption 1Document2 pagesLe Fonctionnement en Interruption 1maoukil ayoubPas encore d'évaluation
- 2 SupportCours2-TELCalcDocument5 pages2 SupportCours2-TELCalcSamia FassouliPas encore d'évaluation
- Tpe Inf 417Document4 pagesTpe Inf 417DJELASSEM CYRILLEPas encore d'évaluation
- Chapitre 3Document11 pagesChapitre 3Tahar GFPas encore d'évaluation
- Les InterruptionsDocument69 pagesLes InterruptionsMoh MohPas encore d'évaluation
- Chapitre 7 - Exceptions Et InterruptionsDocument18 pagesChapitre 7 - Exceptions Et InterruptionselmcadbuickPas encore d'évaluation
- Chapitre MicroprocesseurDocument9 pagesChapitre MicroprocesseurMahdi Ben AbdallahPas encore d'évaluation
- Prosit6 Youssef LahmadiDocument9 pagesProsit6 Youssef LahmadiYoussef LahmadiPas encore d'évaluation
- Chap8 ProcesseurDocument19 pagesChap8 Processeurkamel benkouider sahraouiPas encore d'évaluation
- CHAP Les InterruptionsDocument56 pagesCHAP Les InterruptionswlabiodPas encore d'évaluation
- Les Interruptions - SolutionsDocument3 pagesLes Interruptions - SolutionsRigobert DuconPas encore d'évaluation
- Chap5 P4 InterruptionsDocument4 pagesChap5 P4 InterruptionsIlyas bouakkazPas encore d'évaluation
- Interruptions PDFDocument16 pagesInterruptions PDFmodou BADIANEPas encore d'évaluation
- Exti and NvicDocument12 pagesExti and Nvicadil bakkariPas encore d'évaluation
- ALMODocument91 pagesALMObeckytom75100% (1)
- Chapitre 5 AODocument12 pagesChapitre 5 AOMoujahed GassoumiPas encore d'évaluation
- C64 Interrupts FR Part03Document6 pagesC64 Interrupts FR Part03olivier bernhardPas encore d'évaluation
- Chapitre 5Document5 pagesChapitre 5info llePas encore d'évaluation
- PIC4Document7 pagesPIC4Kadri MongiPas encore d'évaluation
- Interruption Du 6809-2Document12 pagesInterruption Du 6809-2bouchenebPas encore d'évaluation
- Sommaire: Thème 1: MicrocontrôleursDocument13 pagesSommaire: Thème 1: Microcontrôleurschelbifiras1Pas encore d'évaluation
- Chapitre 2 AODocument34 pagesChapitre 2 AOMoujahed GassoumiPas encore d'évaluation
- Série 5Document2 pagesSérie 5Abdelfatah FerhatPas encore d'évaluation
- Cours 2Document48 pagesCours 2fotsoarolePas encore d'évaluation
- Introduction MicrocontroleurDocument8 pagesIntroduction Microcontroleurhouda bouzekriPas encore d'évaluation
- Les IrqDocument24 pagesLes IrqYasmine OuelPas encore d'évaluation
- Cours 10 UP KEDIR (Mode de Compatibilité)Document29 pagesCours 10 UP KEDIR (Mode de Compatibilité)Kam ZegPas encore d'évaluation
- PTR 3 MaterielDocument15 pagesPTR 3 MaterielsystemeinfolicencePas encore d'évaluation
- Chapitre 3 - MicroDocument21 pagesChapitre 3 - MicroTayssir zayetPas encore d'évaluation
- Architecture2 220621 212330Document6 pagesArchitecture2 220621 212330romynorlinePas encore d'évaluation
- Banque de filtres: Aperçu des techniques de banque de filtres de Computer VisionD'EverandBanque de filtres: Aperçu des techniques de banque de filtres de Computer VisionPas encore d'évaluation
- Suite logicielle: Révolutionner la vision par ordinateur avec la suite logicielle ultimeD'EverandSuite logicielle: Révolutionner la vision par ordinateur avec la suite logicielle ultimePas encore d'évaluation
- Sed Et Awk Le Guide Pratique Pour Les Debutants Sous LinuxD'EverandSed Et Awk Le Guide Pratique Pour Les Debutants Sous LinuxPas encore d'évaluation
- Composant Ethernet PDFDocument359 pagesComposant Ethernet PDFaicha2008Pas encore d'évaluation
- VsatDocument11 pagesVsatMuhamed Yussuf H'ajji0% (1)
- Présentation 4Document39 pagesPrésentation 4Amine Maache100% (1)
- Expo Groupe4 FinalDocument33 pagesExpo Groupe4 FinalDaba DiopPas encore d'évaluation
- 1-Premières Règles D'ingénierie Radio UMTS900 V1 PDFDocument32 pages1-Premières Règles D'ingénierie Radio UMTS900 V1 PDFZoheir KacimiPas encore d'évaluation
- TD2 Module P514 A.U. 2015/2016Document6 pagesTD2 Module P514 A.U. 2015/2016OUMAIMA LAMAAMARPas encore d'évaluation
- Cat Sage Erp x3 v6 Outils Developpement CX317 PDFDocument19 pagesCat Sage Erp x3 v6 Outils Developpement CX317 PDFznim04Pas encore d'évaluation
- Comm Tool 1000Document3 pagesComm Tool 1000mnolasco2010Pas encore d'évaluation
- Modèle Rapport 2019Document6 pagesModèle Rapport 2019Sahal RachidPas encore d'évaluation
- conceptsWB18 PDFDocument129 pagesconceptsWB18 PDFSerge Senyo SedayaPas encore d'évaluation
- Apprentissage JavaDocument406 pagesApprentissage JavaSmart SharmPas encore d'évaluation
- Informatique Cours - CopieDocument18 pagesInformatique Cours - CopieKhaireddine Ramoul100% (1)
- 2.2.4.9 Packet Tracer - Configuring Switch Port Security InstructionsDocument2 pages2.2.4.9 Packet Tracer - Configuring Switch Port Security Instructionskhadija benneni100% (1)
- RAPPORT Sécurisation D'un Réseau WifiDocument58 pagesRAPPORT Sécurisation D'un Réseau Wifishileykoss100% (6)
- CYJERCP Formation Java Eclipse RCP Developper Des Applications Desktop Client Riche PDFDocument2 pagesCYJERCP Formation Java Eclipse RCP Developper Des Applications Desktop Client Riche PDFCertyouFormationPas encore d'évaluation
- Rapport KamalDocument18 pagesRapport KamalajouaouyassinePas encore d'évaluation
- GPS TDSDocument25 pagesGPS TDSOussama MAKNI0% (1)
- SCH01 Sup 5X PDFDocument2 084 pagesSCH01 Sup 5X PDFKablan NoelPas encore d'évaluation
- Les Convertisseurs Analogiques Numériques 16F877Document4 pagesLes Convertisseurs Analogiques Numériques 16F877sofianePas encore d'évaluation
- CoursSketchup Id6694 PDFDocument7 pagesCoursSketchup Id6694 PDFgiresse umbaPas encore d'évaluation
- TP3 Circuit LogiqueDocument17 pagesTP3 Circuit LogiqueoumarPas encore d'évaluation
- 3.3.1.2 Packet Tracer - Skills Integration Challenge Instructions PDFDocument4 pages3.3.1.2 Packet Tracer - Skills Integration Challenge Instructions PDFAyman BahloulPas encore d'évaluation
- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Automate Programmable S7-200 Manuel Système SimaticDocument560 pages1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Automate Programmable S7-200 Manuel Système SimaticTonprince Knight Ad100% (1)
- Guide D'achat Video SurveillanceDocument4 pagesGuide D'achat Video SurveillancemandeepmailsPas encore d'évaluation