Vous aimerez peut-être aussi
- WPAN Ou WLANDocument5 pagesWPAN Ou WLANDidididi DodoPas encore d'évaluation
- DARwIn OP PDFDocument5 pagesDARwIn OP PDFDidididi DodoPas encore d'évaluation
- Programmer Avec Flowcode2Document6 pagesProgrammer Avec Flowcode2Didididi DodoPas encore d'évaluation
- Programmer Avec Python-Les BouclesDocument5 pagesProgrammer Avec Python-Les BouclesDidididi DodoPas encore d'évaluation
- Etude Des Montages de Base - v2 PDFDocument7 pagesEtude Des Montages de Base - v2 PDFDidididi DodoPas encore d'évaluation
- Protocole FTPDocument9 pagesProtocole FTPDidididi DodoPas encore d'évaluation
- Programmer Avec Flowcode1Document8 pagesProgrammer Avec Flowcode1Didididi DodoPas encore d'évaluation
- TP Resistance ElectriqueDocument8 pagesTP Resistance ElectriqueDidididi DodoPas encore d'évaluation
- Protocoles Ethernet-IP-DHCP-DNSDocument5 pagesProtocoles Ethernet-IP-DHCP-DNSDidididi DodoPas encore d'évaluation
- Programmer Avec Python-Les ConditionsDocument5 pagesProgrammer Avec Python-Les ConditionsDidididi DodoPas encore d'évaluation
- Resistance Electrique PDFDocument7 pagesResistance Electrique PDFDidididi DodoPas encore d'évaluation
- TP Reseaux InformatiquesDocument13 pagesTP Reseaux InformatiquesDidididi DodoPas encore d'évaluation
- Cours Sur La Logique CombinatoireDocument5 pagesCours Sur La Logique CombinatoireDidididi DodoPas encore d'évaluation
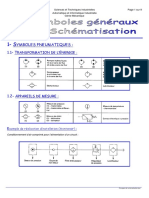
- Symboles Pneumatiques Et ElectriquesDocument9 pagesSymboles Pneumatiques Et ElectriquesDidididi DodoPas encore d'évaluation
- GRAFCET - Structuration Par Encapsulation PDFDocument3 pagesGRAFCET - Structuration Par Encapsulation PDFDidididi DodoPas encore d'évaluation
- Les Capteurs PDFDocument4 pagesLes Capteurs PDFDidididi DodoPas encore d'évaluation
- Les Moteurs À Balourds: La Solution Qui Fait Avancer Vos ProduitsDocument20 pagesLes Moteurs À Balourds: La Solution Qui Fait Avancer Vos ProduitsMohand Oulhadj ChalaliPas encore d'évaluation
- Bac Blanc 2023 2ème ExemplaireDocument3 pagesBac Blanc 2023 2ème ExemplaireHatim SebbahiPas encore d'évaluation
- Cours Exponentielle ExercicesDocument2 pagesCours Exponentielle Exercicesoussama sadkiPas encore d'évaluation
- Chapitre3 Algèbre de Bool Partie2Document27 pagesChapitre3 Algèbre de Bool Partie2Sou HìLaPas encore d'évaluation
- Bachelard Bergson Continuite Et Discontinuite Une Relation Philosophique Au Coeur Du Xxe Siecle en FranceDocument3 pagesBachelard Bergson Continuite Et Discontinuite Une Relation Philosophique Au Coeur Du Xxe Siecle en FranceVladimir ChakibPas encore d'évaluation
- Mémoire FFCDocument40 pagesMémoire FFCanassPas encore d'évaluation
- Fiche TD Calcul Polygonal ReduitDocument9 pagesFiche TD Calcul Polygonal ReduitALON?TSIE TANEZOUA ISRAELPas encore d'évaluation
- Enoncé TD 3 Coloration Des GraphesDocument6 pagesEnoncé TD 3 Coloration Des GraphesÑējmêddÿñ MæåtøugPas encore d'évaluation
- DellysDocument98 pagesDellysNari ManePas encore d'évaluation
- NF en 61511-3 - Systèmes Instrumentés de SécuritéDocument128 pagesNF en 61511-3 - Systèmes Instrumentés de SécuritéGRAYAAPas encore d'évaluation
- Alphabet Phonétique International (API) : Quelques Remarques PréliminairesDocument4 pagesAlphabet Phonétique International (API) : Quelques Remarques PréliminairesCarina SolomonPas encore d'évaluation
- Ms Hyd Dehbi PDFDocument195 pagesMs Hyd Dehbi PDFBenito BenitoPas encore d'évaluation
- J Chapitre 1Document9 pagesJ Chapitre 1Ziad AouichatPas encore d'évaluation
- Chef de La Division OperationsDocument2 pagesChef de La Division OperationsJunior VoumaPas encore d'évaluation
- Notice Technique Travaux D Injection Des Anomalies Liees A La Dissolution Du Gypse Anteludien PDFDocument14 pagesNotice Technique Travaux D Injection Des Anomalies Liees A La Dissolution Du Gypse Anteludien PDFAbderrahmane El QouaisPas encore d'évaluation
- Table Des Matières: Lycée Classique de Bafoussam 2015-2016 Travaux Dirigés de Mathématiques Première C/D 0.1 BarycentreDocument38 pagesTable Des Matières: Lycée Classique de Bafoussam 2015-2016 Travaux Dirigés de Mathématiques Première C/D 0.1 BarycentreEssohanam Awate100% (1)
- Bcbs 239Document28 pagesBcbs 239Briand Eric DUALAPas encore d'évaluation
- Formulaire CandidatureDocument14 pagesFormulaire CandidatureDamien damingPas encore d'évaluation
- Cours 1 - Budget Des Actions Marketing Et CommercialesDocument29 pagesCours 1 - Budget Des Actions Marketing Et Commercialesjulien-34820Pas encore d'évaluation
- Stratégie Océan Bleu Partie 4 PDFDocument40 pagesStratégie Océan Bleu Partie 4 PDFAbdellahi NafaPas encore d'évaluation
- Histoire Et Éducation À La CitoyennetéDocument356 pagesHistoire Et Éducation À La CitoyennetéHist 2021100% (2)
- Chapitre 12 - Liberté Et ResponsabilitéDocument5 pagesChapitre 12 - Liberté Et ResponsabilitéLoukman Mahiza CompaoréPas encore d'évaluation
- Méthodologie de La Dissertation Philosophique TSTMGDocument2 pagesMéthodologie de La Dissertation Philosophique TSTMGruizPas encore d'évaluation
- 2LP PV GlobalDocument4 pages2LP PV Globalbac 18Pas encore d'évaluation
- Guide Smiler Pour L - Elaboration de Systemes MealDocument46 pagesGuide Smiler Pour L - Elaboration de Systemes MealsamyPas encore d'évaluation
- Corrigé Seri3 CompteursDocument9 pagesCorrigé Seri3 CompteursRe Sab RinaPas encore d'évaluation
- La Néologie Linguistique Utilisée Au Département Amazigh de Béjaia Un Essai D'évaluation Sur Le Plan MorphosémantiqueDocument311 pagesLa Néologie Linguistique Utilisée Au Département Amazigh de Béjaia Un Essai D'évaluation Sur Le Plan MorphosémantiqueⴰⵖⵡⴰⵖPas encore d'évaluation
- Elements Traces Metalliques - Liste Des Methodes Officielles v1Document1 pageElements Traces Metalliques - Liste Des Methodes Officielles v1KhalidOfqirPas encore d'évaluation
- 2Document26 pages2kodjoPas encore d'évaluation
- 2023 Sujet BacDocument3 pages2023 Sujet BacMa NouPas encore d'évaluation
- Excel Formulas That Automate Tasks You No Longer Have Time ForD'EverandExcel Formulas That Automate Tasks You No Longer Have Time ForÉvaluation : 5 sur 5 étoiles5/5 (1)
- The Leader Habit: Master the Skills You Need to Lead--in Just Minutes a DayD'EverandThe Leader Habit: Master the Skills You Need to Lead--in Just Minutes a DayÉvaluation : 4 sur 5 étoiles4/5 (2)
- Numerology for Decoding Behavior: Your Personal Numbers at Work, with Family, and in RelationshipsD'EverandNumerology for Decoding Behavior: Your Personal Numbers at Work, with Family, and in RelationshipsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Troubleshooting: A Technician's Guide, Second EditionD'EverandTroubleshooting: A Technician's Guide, Second EditionÉvaluation : 4 sur 5 étoiles4/5 (12)
- The Road to Integration: A Guide to Applying the ISA-95 Standard in ManufacturingD'EverandThe Road to Integration: A Guide to Applying the ISA-95 Standard in ManufacturingÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Software Engineering: Architecture-driven Software DevelopmentD'EverandSoftware Engineering: Architecture-driven Software DevelopmentÉvaluation : 4.5 sur 5 étoiles4.5/5 (6)
- Robert Cialdini's Influence: The Psychology of Persuasion SummaryD'EverandRobert Cialdini's Influence: The Psychology of Persuasion SummaryÉvaluation : 3.5 sur 5 étoiles3.5/5 (14)
- Exactly What to Say: The Magic Words for Influence and ImpactD'EverandExactly What to Say: The Magic Words for Influence and ImpactÉvaluation : 4 sur 5 étoiles4/5 (83)
- Fascinate: Your 7 Triggers to Persuasion and CaptivationD'EverandFascinate: Your 7 Triggers to Persuasion and CaptivationÉvaluation : 3.5 sur 5 étoiles3.5/5 (37)
- Secrets of Question-Based Selling: How the Most Powerful Tool in Business Can Double Your Sales Results (Top Selling Books to Increase Profit, Money Books for Growth)D'EverandSecrets of Question-Based Selling: How the Most Powerful Tool in Business Can Double Your Sales Results (Top Selling Books to Increase Profit, Money Books for Growth)Évaluation : 5 sur 5 étoiles5/5 (1)
- How to Attract Men: Demystifying Male Behavior to Attract and Keep the Man of your Dreams While Staying True to your Core SelfD'EverandHow to Attract Men: Demystifying Male Behavior to Attract and Keep the Man of your Dreams While Staying True to your Core SelfÉvaluation : 4.5 sur 5 étoiles4.5/5 (12)
- PLC Controls with Structured Text (ST): IEC 61131-3 and best practice ST programmingD'EverandPLC Controls with Structured Text (ST): IEC 61131-3 and best practice ST programmingÉvaluation : 4 sur 5 étoiles4/5 (11)
- Alchemy: The Dark Art and Curious Science of Creating Magic in Brands, Business, and LifeD'EverandAlchemy: The Dark Art and Curious Science of Creating Magic in Brands, Business, and LifeÉvaluation : 3.5 sur 5 étoiles3.5/5 (67)
- Reinventing Your Life: the bestselling breakthrough program to end negative behaviour and feel greatD'EverandReinventing Your Life: the bestselling breakthrough program to end negative behaviour and feel greatÉvaluation : 4 sur 5 étoiles4/5 (13)
- Summary and Analysis of Predictably Irrational: The Hidden Forces That Shape Our Decisions: Based on the Book by Dan ArielyD'EverandSummary and Analysis of Predictably Irrational: The Hidden Forces That Shape Our Decisions: Based on the Book by Dan ArielyÉvaluation : 5 sur 5 étoiles5/5 (4)
- Copy, Copy, Copy: How to Do Smarter Marketing by Using Other People's IdeasD'EverandCopy, Copy, Copy: How to Do Smarter Marketing by Using Other People's IdeasÉvaluation : 5 sur 5 étoiles5/5 (1)
- Happy Money: The Science of Happier SpendingD'EverandHappy Money: The Science of Happier SpendingÉvaluation : 4 sur 5 étoiles4/5 (22)
- Take Charge of Your Life: How to Get What You Need with Choice-Theory PsychologyD'EverandTake Charge of Your Life: How to Get What You Need with Choice-Theory PsychologyÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Distributed Sensor Systems: Practice and ApplicationsD'EverandDistributed Sensor Systems: Practice and ApplicationsPas encore d'évaluation
- Refrigeration, Air Conditioning and Heat PumpsD'EverandRefrigeration, Air Conditioning and Heat PumpsÉvaluation : 4 sur 5 étoiles4/5 (21)