Vous aimerez peut-être aussi
- Les Indicateurs de Performance Logistique LPDocument84 pagesLes Indicateurs de Performance Logistique LPZayene Khmais100% (1)
- Compte Rendu TP3Document31 pagesCompte Rendu TP3Jourdan MbappePas encore d'évaluation
- Cours de Merise MLT MLDDocument21 pagesCours de Merise MLT MLDSékou DiomandePas encore d'évaluation
- TDmagnetVF2 PDFDocument37 pagesTDmagnetVF2 PDFd'ALMEIDAPas encore d'évaluation
- Serie RCDocument2 pagesSerie RCMondher DhahriPas encore d'évaluation
- Programme 1ere 2eme SetiDocument33 pagesProgramme 1ere 2eme Setizaza100% (1)
- ST Terminale Exerciceschimie Corrigecinetique Ex6.htm PDFDocument4 pagesST Terminale Exerciceschimie Corrigecinetique Ex6.htm PDFd'ALMEIDAPas encore d'évaluation
- ERCC 04 2reactifs PDFDocument2 pagesERCC 04 2reactifs PDFd'ALMEIDAPas encore d'évaluation
- Induction Magn PDFDocument5 pagesInduction Magn PDFd'ALMEIDA100% (1)
- PDFDocument22 pagesPDFd'ALMEIDAPas encore d'évaluation
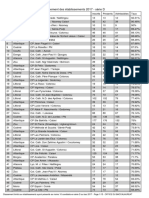
- Siou 2017 - Classement Etablissements 2017 D PDFDocument15 pagesSiou 2017 - Classement Etablissements 2017 D PDFd'ALMEIDAPas encore d'évaluation
- Mémoire IA Elias BOUTAHARDocument142 pagesMémoire IA Elias BOUTAHARahmedPas encore d'évaluation
- Cours - Algorithmes de Colonies de FourmisDocument7 pagesCours - Algorithmes de Colonies de FourmisBrahim GasbaouiPas encore d'évaluation
- ELE113-Chap 01-Le Canal AWGNDocument43 pagesELE113-Chap 01-Le Canal AWGNyoutube tvPas encore d'évaluation
- Cpgep-C11 7Document12 pagesCpgep-C11 7Nabil KchiriPas encore d'évaluation
- Thermo chp2Document8 pagesThermo chp2Achraf BlankiPas encore d'évaluation
- Fonction Une Variable Relle PDFDocument13 pagesFonction Une Variable Relle PDFBepito DikandaPas encore d'évaluation
- Bilmat TheorieDocument26 pagesBilmat Theorienesrine derPas encore d'évaluation
- Fiche 2: Statistique Descriptive Et GraphiqueDocument15 pagesFiche 2: Statistique Descriptive Et GraphiqueMaster CILPas encore d'évaluation
- Article-BUP 6010Document10 pagesArticle-BUP 6010Ofmyrh OngoboPas encore d'évaluation
- Manuel CASTOR ConceptVisuFEM WNT5Document76 pagesManuel CASTOR ConceptVisuFEM WNT5Ahmad CoulibalyPas encore d'évaluation
- TD Machine Regression PythonDocument3 pagesTD Machine Regression Pythontest testPas encore d'évaluation
- Cours Add MMBDSDocument25 pagesCours Add MMBDSAbdallahi SidiPas encore d'évaluation
- These Et HDR Onera 2019Document247 pagesThese Et HDR Onera 2019rachid idrissiPas encore d'évaluation
- Cours Plans D'experience 2022-2023Document39 pagesCours Plans D'experience 2022-2023Aisaoua BuobouPas encore d'évaluation
- Exo Tech 71Document2 pagesExo Tech 71Théo AngamaPas encore d'évaluation
- Comment Tester Un Alternateur IndustrielDocument43 pagesComment Tester Un Alternateur Industrielchichid2008100% (2)
- 2003 09 Polynesie Correction Exo2 CondensateurDocument4 pages2003 09 Polynesie Correction Exo2 Condensateurالغزيزال الحسن EL GHZIZAL HassanePas encore d'évaluation
- Communication Optique FilesDocument4 pagesCommunication Optique FilesMouadSamaPas encore d'évaluation
- Fonction FirmeDocument6 pagesFonction Firmeelmehdi majidiPas encore d'évaluation
- Matrice EDIM 2013 2014Document1 pageMatrice EDIM 2013 2014Yaacob HgPas encore d'évaluation
- 0012 - Sous-Programmes (Partie 1 - Concepts)Document13 pages0012 - Sous-Programmes (Partie 1 - Concepts)Belhadj Abd ElhafidPas encore d'évaluation
- RAPPORTDocument70 pagesRAPPORTAnonymous uzzfJo8sPas encore d'évaluation
- Chapitre 1 Alphabet Et LangagesDocument16 pagesChapitre 1 Alphabet Et LangagesMariem Selmi100% (1)
- Chap1-Electronique AppliqueeDocument5 pagesChap1-Electronique Appliqueeademtalbi554Pas encore d'évaluation
- Annale Bac 2014 Mathématiques Terminale S Enseignement Obligatoire Et Spécialité Antilles GuyaneDocument4 pagesAnnale Bac 2014 Mathématiques Terminale S Enseignement Obligatoire Et Spécialité Antilles GuyaneNestor GrahPas encore d'évaluation