Vous aimerez peut-être aussi
- Correction Ex Méca 1 7-7-2020Document3 pagesCorrection Ex Méca 1 7-7-2020Ahmed RACHDIPas encore d'évaluation
- Correction Examen DOE Du 23-5-2022 Sans BarêmeDocument4 pagesCorrection Examen DOE Du 23-5-2022 Sans BarêmeYosra JbeliPas encore d'évaluation
- Correction Ex Méca 1 7-7-2020Document3 pagesCorrection Ex Méca 1 7-7-2020Ahmed RACHDIPas encore d'évaluation
- BELHOUL HarounDocument122 pagesBELHOUL HarounchamissioPas encore d'évaluation
- Ds Procedes de Mise en Forme Des MF 1 - 2022 - SiteDocument4 pagesDs Procedes de Mise en Forme Des MF 1 - 2022 - SiteAmira WarhéniPas encore d'évaluation
- chapitre1-Environnement virtuel (1)Document36 pageschapitre1-Environnement virtuel (1)Amira WarhéniPas encore d'évaluation
- Examens-Normes Et Certifications-Rattrapage-2021-2022-Ver (1) - MastechDocument2 pagesExamens-Normes Et Certifications-Rattrapage-2021-2022-Ver (1) - MastechAmira WarhéniPas encore d'évaluation
- Formulaire Preinscription PDFDocument1 pageFormulaire Preinscription PDFAmira WarhéniPas encore d'évaluation
- PR - Sentation1.pptx Filename UTF-8''Présentation1Document18 pagesPR - Sentation1.pptx Filename UTF-8''Présentation1Amira WarhéniPas encore d'évaluation
- Expériences Professionnelles: Mlle Hamrouni KhawlaDocument2 pagesExpériences Professionnelles: Mlle Hamrouni KhawlaAmira WarhéniPas encore d'évaluation
- Diplomes Bac2 Sourcing GMM 2023Document1 pageDiplomes Bac2 Sourcing GMM 2023Amira WarhéniPas encore d'évaluation
- Ingenieur Genie Mecanique Et Mecatronique Apprentissage 2022 - CompressedDocument2 pagesIngenieur Genie Mecanique Et Mecatronique Apprentissage 2022 - CompressedAmira WarhéniPas encore d'évaluation
- Cours Qualité-SécuritéDocument178 pagesCours Qualité-SécuritéAmira WarhéniPas encore d'évaluation
- Gamme DusinageDocument3 pagesGamme DusinageAmira WarhéniPas encore d'évaluation
- Gamme DusinageDocument3 pagesGamme DusinageAmira WarhéniPas encore d'évaluation
- Bilan Thermique-ConvertiDocument6 pagesBilan Thermique-ConvertiAmira WarhéniPas encore d'évaluation
- Itii - Iut Lyon 1 - Ucbl 2019-2020 Examen de Science Des MatériauxDocument6 pagesItii - Iut Lyon 1 - Ucbl 2019-2020 Examen de Science Des MatériauxAmira WarhéniPas encore d'évaluation
- Banc de Simulation de Pannes CRC 115Document10 pagesBanc de Simulation de Pannes CRC 115Amira WarhéniPas encore d'évaluation
- Part 3Document8 pagesPart 3Amira WarhéniPas encore d'évaluation
- Presentation de L Audit Energetique Par M Neji AMAIMIA Expert PCAM ConvertiDocument21 pagesPresentation de L Audit Energetique Par M Neji AMAIMIA Expert PCAM ConvertiAmira WarhéniPas encore d'évaluation
- Pfe MecaniqueDocument5 pagesPfe MecaniqueAmira Warhéni100% (1)
- Recu Print - Inscription Universitaire en LigneDocument2 pagesRecu Print - Inscription Universitaire en LigneAhmed AlouiPas encore d'évaluation
- Capteurs ThermiquesDocument19 pagesCapteurs ThermiquesAmira WarhéniPas encore d'évaluation
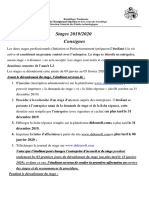
- ConsignesDocument2 pagesConsignesAhmed BennasrPas encore d'évaluation
- Compte RenduDocument4 pagesCompte RenduAmira WarhéniPas encore d'évaluation
- Chambres Froides PDFDocument140 pagesChambres Froides PDFtraadel_320610041Pas encore d'évaluation
- Moteur Asynchrone TriphaséDocument11 pagesMoteur Asynchrone TriphaséAmira WarhéniPas encore d'évaluation
- Leçon 3Document8 pagesLeçon 3Amira WarhéniPas encore d'évaluation
- Guide Procede Sechage1Document110 pagesGuide Procede Sechage1Brahim Abaghough100% (1)
- Cours Complet PDFDocument136 pagesCours Complet PDFBilel WerghemmiPas encore d'évaluation
- 99267-Article Text-261422-1-10-20140107Document16 pages99267-Article Text-261422-1-10-20140107NADPas encore d'évaluation
- Chapitre. Régression Linéaire Simple - 19-20 - Part01Document10 pagesChapitre. Régression Linéaire Simple - 19-20 - Part01Kamilia bouhraouaPas encore d'évaluation
- FlowCode Pour AVR (Élève)Document23 pagesFlowCode Pour AVR (Élève)Philippe MorentonPas encore d'évaluation
- Exploitation de Texte 2 Ce2Document48 pagesExploitation de Texte 2 Ce2EULOGE KOULAIPas encore d'évaluation
- 1956 Les Mysteres MajeursDocument0 page1956 Les Mysteres Majeursguynahas3845Pas encore d'évaluation
- TD5-TP5 PythonVerFinaleDocument2 pagesTD5-TP5 PythonVerFinalehayat KIRATEPas encore d'évaluation
- Chap 2 Les Extrudeuses 2020 EtudiantsDocument62 pagesChap 2 Les Extrudeuses 2020 EtudiantsElyess Ben Ahmed100% (1)
- Histoire Révolution Industrielle: Objectif: Expliciter Les Notions D'artisanat Et D'industrieDocument7 pagesHistoire Révolution Industrielle: Objectif: Expliciter Les Notions D'artisanat Et D'industrieLuana PereiraPas encore d'évaluation
- Etude de Fonction Cours PDFDocument2 pagesEtude de Fonction Cours PDFKeisha0% (1)
- DM 1Document2 pagesDM 1Lotfi Ben MalekPas encore d'évaluation
- Tp2 Avec CorrectionDocument4 pagesTp2 Avec CorrectionABDOUBNPas encore d'évaluation
- Chamoa P PsidaDocument112 pagesChamoa P PsidaHanaa DamiPas encore d'évaluation
- Conception ArchitecturaleDocument6 pagesConception ArchitecturaleYasmine KaraPas encore d'évaluation
- MR067 Bardage PDFDocument48 pagesMR067 Bardage PDFDjamila HaddiPas encore d'évaluation
- Ensembles, Application 2 - 21-23Document4 pagesEnsembles, Application 2 - 21-23fbdbhdPas encore d'évaluation
- Top 100 Verbes AllemandDocument1 pageTop 100 Verbes AllemandЖеня ФеуджиоPas encore d'évaluation
- Continuite ControleDocument1 pageContinuite ControleHossamPas encore d'évaluation
- Windows Power ShellDocument350 pagesWindows Power ShellSofiane Charef100% (4)
- Conception Et Étude D - Un PontDocument172 pagesConception Et Étude D - Un PontFerhat Outaleb100% (1)
- Petite Contribution Sur Les Formules de La SexuationDocument7 pagesPetite Contribution Sur Les Formules de La SexuationLorena BarajasPas encore d'évaluation
- Memory FinalDocument93 pagesMemory FinalAllarassem NgamadjiPas encore d'évaluation
- Le Livre Muet Des AlchimistesDocument8 pagesLe Livre Muet Des AlchimistesTyron100% (3)
- Exam Materaux PDFDocument19 pagesExam Materaux PDFmaraghni_hassine7592Pas encore d'évaluation
- AME ORAN-Prolongation Orat-20190620-V1Document11 pagesAME ORAN-Prolongation Orat-20190620-V1DJAMEL EDDINE DJAFNIPas encore d'évaluation
- Guide de Redaction PDFDocument45 pagesGuide de Redaction PDFidia.ouedraogo.2000Pas encore d'évaluation
- Charte Eco-ResponsableDocument2 pagesCharte Eco-Responsableapi-385648143Pas encore d'évaluation
- ComPact NS - 630A - 33468Document3 pagesComPact NS - 630A - 33468Mohamed DhifallahPas encore d'évaluation
- M Lemeire PDFDocument61 pagesM Lemeire PDFfg55930Pas encore d'évaluation
- C.R Evaluation G-14Document6 pagesC.R Evaluation G-14Mehdi BKPas encore d'évaluation