Vous aimerez peut-être aussi
- Corrige 05Document4 pagesCorrige 05Salma SoulaymaniPas encore d'évaluation
- ANA NUM (1) - CopieDocument51 pagesANA NUM (1) - Copiesyntyche n zeboPas encore d'évaluation
- Chap04 Series EntieresDocument11 pagesChap04 Series EntieresNanga YeoPas encore d'évaluation
- GC 2017 LGC L3 S5 GS511 - RDMDocument8 pagesGC 2017 LGC L3 S5 GS511 - RDMMAZOUZI AbdelhamidPas encore d'évaluation
- Application de La Théorie Des GraphesDocument22 pagesApplication de La Théorie Des Graphestotof74Pas encore d'évaluation
- Dchapitre 4Document13 pagesDchapitre 4Salma ElkaddouriPas encore d'évaluation
- C 7Document60 pagesC 7Rachid LahcenPas encore d'évaluation
- Optimization 1Document11 pagesOptimization 1Noureddine GhoggaliPas encore d'évaluation
- Diff Finies Vol Finis 2020Document2 pagesDiff Finies Vol Finis 2020Ishak KETTAFPas encore d'évaluation
- Statique Des Cables - PresentationDocument51 pagesStatique Des Cables - PresentationMiloudiPas encore d'évaluation
- Théorie Des Plaques Et Coques - Partie IIDocument17 pagesThéorie Des Plaques Et Coques - Partie IIAmine HeddoubPas encore d'évaluation
- EDP Pour IngenieurDocument136 pagesEDP Pour IngenieurAbdel DaaPas encore d'évaluation
- Rapport PS PlaquesDocument15 pagesRapport PS PlaquesSaleh Zfr100% (1)
- gmm4 EF Bendali PDFDocument112 pagesgmm4 EF Bendali PDFRahim AnguoPas encore d'évaluation
- Controle 1 MMCDocument2 pagesControle 1 MMCsouhayb elmanssouriPas encore d'évaluation
- Correction Des TD M1GCDocument5 pagesCorrection Des TD M1GCMed Ely MedPas encore d'évaluation
- 03 2 PL Simplexe Variables Artificielles 19 20Document25 pages03 2 PL Simplexe Variables Artificielles 19 20belfathiPas encore d'évaluation
- Poussée Butée CorrigéDocument6 pagesPoussée Butée CorrigéGuefrech khailPas encore d'évaluation
- Charpente MétalliqueDocument16 pagesCharpente MétalliqueMaaloul FakherPas encore d'évaluation
- correction-TD-elasticité - Serie1 5Document1 pagecorrection-TD-elasticité - Serie1 5سيدة ام رهامPas encore d'évaluation
- Polynomes de BernsteinDocument3 pagesPolynomes de BernsteinSimo RachPas encore d'évaluation
- Travaux Diriges: République Du BéninDocument34 pagesTravaux Diriges: République Du BénintoniPas encore d'évaluation
- TD Integ CurvDocument1 pageTD Integ CurvMohamed OuaggaPas encore d'évaluation
- Proba Exo7Document4 pagesProba Exo7Ayou HamPas encore d'évaluation
- Concours Iba Dla 2022 BacDocument6 pagesConcours Iba Dla 2022 BacTabou GastonePas encore d'évaluation
- Partie 2Document20 pagesPartie 2Sphinx Infini100% (1)
- D Introduction À La Dynamique de StructuresDocument10 pagesD Introduction À La Dynamique de Structuresnafaa_ali1375Pas encore d'évaluation
- Examen PR-2015-MMC ENIBDocument3 pagesExamen PR-2015-MMC ENIBZied AbidiPas encore d'évaluation
- GradientDocument3 pagesGradientrihame92Pas encore d'évaluation
- CC1 Mecasol 2017 2018Document2 pagesCC1 Mecasol 2017 2018Youness CharihPas encore d'évaluation
- Méthode de Ritz Et Complément Au Principe de L'énergie PotentielleDocument7 pagesMéthode de Ritz Et Complément Au Principe de L'énergie Potentiellefadi eidPas encore d'évaluation
- Cours Maths 3 PDFDocument116 pagesCours Maths 3 PDFAntes de Partir, A.C.Pas encore d'évaluation
- TPEDO1bis PDFDocument10 pagesTPEDO1bis PDFأبو كعب علاء الدينPas encore d'évaluation
- Cours BADocument38 pagesCours BAEsseigou aka ezekias100% (1)
- Cours Methodologies de Conception: 'Ing Én Ieu RsDocument43 pagesCours Methodologies de Conception: 'Ing Én Ieu RsMOKHTAR NAYMAPas encore d'évaluation
- Corrige - Serie1 - Dynamique Des Structures - 2020Document14 pagesCorrige - Serie1 - Dynamique Des Structures - 2020taha fathallahPas encore d'évaluation
- Résume de Module Conduite DDocument2 pagesRésume de Module Conduite DOussama aytbenahmedPas encore d'évaluation
- Examen Béton ArméDocument10 pagesExamen Béton ArméboscoPas encore d'évaluation
- Theoreme Residus PDFDocument26 pagesTheoreme Residus PDFAnonymous XNijipPas encore d'évaluation
- MA201 Corrige 07 08 PDFDocument6 pagesMA201 Corrige 07 08 PDF2ste3Pas encore d'évaluation
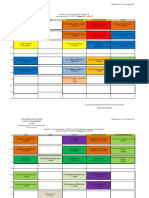
- Horaire Génie CIVIL 2021-2022 - Semaine 12 - 12 Novembre 2021Document7 pagesHoraire Génie CIVIL 2021-2022 - Semaine 12 - 12 Novembre 2021fadi eidPas encore d'évaluation
- Cours PythonDocument22 pagesCours Pythonyassineamn115Pas encore d'évaluation
- TD 4Document1 pageTD 4Ťäřęk ČhėbìłîPas encore d'évaluation
- Réfraction de La HouleDocument27 pagesRéfraction de La HoulekimPas encore d'évaluation
- Série de TD 3Document3 pagesSérie de TD 3Salma NPas encore d'évaluation
- 4 Elements EcondairesDocument37 pages4 Elements EcondairesmidouPas encore d'évaluation
- Exposé:: La Méthode de La BissectionDocument7 pagesExposé:: La Méthode de La BissectionMennaà Mohamed Fidaa El islam100% (1)
- Cours Trans FourierDocument6 pagesCours Trans FourierALFOJOJ100% (1)
- TD MMC - Master1 Esupj 2019 2020Document3 pagesTD MMC - Master1 Esupj 2019 2020Lionel BEYIPas encore d'évaluation
- TD N3 FLEXION Déviée TITOUMDocument2 pagesTD N3 FLEXION Déviée TITOUMAbdelaziz KraaPas encore d'évaluation
- Cours D'analyse Numerique PDFDocument56 pagesCours D'analyse Numerique PDFsofyann170% (2)
- TD1 Forces NodalesDocument32 pagesTD1 Forces NodalesRabiie MnasriiPas encore d'évaluation
- AEP Lasse9Document3 pagesAEP Lasse9Ahmed El MokademPas encore d'évaluation
- Resistance Des MateriauxDocument8 pagesResistance Des MateriauxMOUSAVOU MORVANEPas encore d'évaluation
- 112 3 2 PDFDocument9 pages112 3 2 PDFeterlouPas encore d'évaluation
- Fondation Et Ouvrage en Terre PDFDocument48 pagesFondation Et Ouvrage en Terre PDFCharaf HeniPas encore d'évaluation
- Des risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueD'EverandDes risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscaminguePas encore d'évaluation