Académique Documents
Professionnel Documents
Culture Documents
Programmation Machines Outils Commande Numerique
Transféré par
Ben Fah0 évaluation0% ont trouvé ce document utile (0 vote)
73 vues33 pagesprogrammation MOCN
Titre original
programmation-machines-outils-commande-numerique
Copyright
© © All Rights Reserved
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce document0 évaluation0% ont trouvé ce document utile (0 vote)
73 vues33 pagesProgrammation Machines Outils Commande Numerique
Transféré par
Ben FahVous êtes sur la page 1sur 33
ISET SILIANA / Département GM Production par CN
‘00100
mo.
20
Chapitre 3 :
Programmation des
DAHMANIL. & HADJ BRAHIM B. 28
ISET SILIANA / Département GM Production par CN
Chapitre 3 : Programmation des Machines-Outils 4 Commande Numérique
Introduction
La programmation consiste & décrire les opérations d’usinage dans un langage codé (appelé
code G) assimilable par le calculateur de la machine. C’est le langage de programmation des
MOCN. Ce langage est normalisé (norme ISO 1056) ot
fains codes utilisés ont les mémes
fonctionnalités pour différents contrdleurs de machines-outils (NUM, FANUC, SIEMENS...)
Les autres codes peuvent avoir une interprétation différente d'un contréleur & un autre. Le
langage de programmation des MOCN posséde les caractéristiques suivantes
- La chronologie des actions,
- Lapel des outils,
- Lasélection des vitesses de coupe et d’avance,
- La formulation des trajectoires,
- La définition des coordonnées de fin de trajectoire,
~ Les mises en ou hors fonction d’organes de la machine.
I- Structure d’un programme
La programmation s‘effectue suivant le code ISO. Un progi
nme est constitué de lignes
appelées "blocs". Un bloc correspond aux instructions relatives 4 une séquence d'usinage.
Chaque bloc est constitué d'un groupe de mots. Un mot est un ensemble de caractéres composé
dune adresse suivie de chiffre constituant une information.
Programme
0100
mo
N20
N.
™.
N100 G01 x30F120 Mos
340)
® Bloc : groupe de mots correspondant aux instructions relatives a une séquence d’usinage. La
numérotation des blocs s'effectue de 5 en 5 ou de 10 en 10 pour permettre une insertion
éventuelle de blocs.
DAHMANIL. & HADJ BRAHIM B. 29
SILIANA / Département GM Production par CN
© Exemples de blocs :
Eeriture dun bloc définissant la mise en Ecriture dun bloc définissant une
rotation de broche. trajectoire.
Nao [seco] Mai] MOS N50 |Go1| x20.456 |F150| Mos
| [
Sens de rotation —
Viesse davance
= Point a atteindre
Vitesse de rotation ——
| Numéro de oe Numero du bloc
‘® Mot : ensemble de caractéres comportant une adresse suivie de chiffres constituant une
information, Exemple : X 10.850
® Aaresse : lettre débutant un mot d'un langage machine, qui précise la fonction générale
commandée.
© principale adresses
N... : numéro de ligne : repérage chronologique en début de ligne.
G... : fonctions préparatoires dé
M.
X.Y... Z... : axes principaux désignant les coordonnées des points d’arrivée.
nissant la forme et les conditions de déplacement.
: fonctions auxiliaires donnant les changements d’état de la machine.
L..., Jey K... : paramétres définissant les trajectoires circulaires (rayons).
ini
R... : paramétres di int les trajectoires circulaires.
F...: précise l’avance ou la vitesse d'avance.
de rotation de la broche.
S... : précise la vitesse de coupe ou la vit
T... : symbole du numéro d’outil.
“© structure d'un programme
Un programme est Ia transaction, dans un langage compréhensible par le directeur de
commande numérique d’une machine. Des opérations d’usinage a effectuer sur une piece.
Les différentes manitres de programmer sont
~ La programmation manuelle,
- La programmation assistée : soit conventionnelle par le DNC, soit avec un logiciel de
FAO.
Les documents suivants sont nécessaires :
~ Le dessin de définition,
~ Le contrat de phase avec l’isostatisme et les paramatres de coupe,
~ Le dossier de la machine.
DAHMANIL. & HADJ BRAHIM B. 30
ISET SILIANA / Département GM. Production par CN
Pour réaliser les différentes opérations nécessaires l'usinage d’une pigce, un programme CN
peut Gtre écrit de différentes manires.
Selon la nature de la pigce a usiner et sa complenit, les différentes structures de programme CN
peuvent étre proposées =
- Un programme principal,
- Un programme principal contenant des appels de séquences internes,
- Un programme principal et des sous programmes.
@tre structuré de la maniére suivante :
Pour l'usinage dune pice simple ne nécessite pas de cycles d’ébauche, un programme CN peut
Structure Exemple
y 04723
Numéro du programme (Tour SMI)
vy (Ph 10)
Initialisation
oe v8 G40 G80
Position de dégagement N29 GOO X100 Z100
J (Opération : centrage)
N30 T0505 M06 (Foret & centrer)
Opération 1 N40 GOO X0 752
N45 G95 G97 $2500 FO.05 M03 M08
J N50 GOI Z40
N60 G00 252
Position de dégagement
(|
¥
Opération N
N70 GOO G00 X100 Z100 M09
(Opération : finition profil)
N240 T0303 M06 (Outil de finition)
N250 G92 $4000
N260 G00 X4 Z52 F0.05 M8
N270 GOI G42 X5 746
N280 G96 $250
N290 GOI X15.961 246
N300 X24 Z31
310226
N320 X26
N330 G03 X34 Z22 126 K22
N340 GOL Z18
Position de dévazement
Fin de programme >)
N370 G40 GOO X100 Z100 MOS M09
N710 M02
DAHMANIL. & HADJ BRAHIM B.
31
ISET SILIANA / Département GM.
Production par CN
© Structure d’une opération :
Structure
Exemple
Cpszation précéceate)
Appel de l’outil
Approcher l’outil en rapide
oe
Adapter les conditions de
coupe
——t—
Réaliser l’opération d’usinage
ee
Dégager ’outil en rapide
( Opération suivante)
(Opération : centrage)
N30 T0505 M06 (Foret & centrer)
N40 GOO XO Z100
N45 G97 G95 $2500 FO.05 M03 MO8
N50 GOI Z40
N60 GOO Z100
Il- Les fonctions préparatoires G
1- Classification des fonctions préparatoires G
-® Types de fonctions G :
© Les fonet
n distingue
ns G modales,
© Les fonctions G non modales.
© Fonctions G modales
Une fonction est dite "modale" lorsqu’elle reste active (mémorisée) aprés le bloc oi elle est écrite
jusqu’a sa révocation,
Ces fonctions appartenant a une famille de fonctions G se révoquant mutuellement.
Certaines familles de fonctions G comportent une fonction initialisée & la mise sous tension du
systéme, La validité de ces fonctions est maintenue jusqu’d ce qu’une fonction de méme famille
révoque leur validité,
+ Exemple :
N.. G00 X... Y...
N.. GOI Z...
Interpolation linéaire & vitesse rapide.
interpolation linéaire a vitesse d’usinage, révoque G00.
DAHMANIL. & HADJ BRAHIM B.
32
ISET SILIANA / Département GM. Production par CN
© Fonctions G non modales
Fonctions uniquement valide dans le bloc ou elles sont programmées (révoquée en fin de bloc).
2- Choix du mode de programmation
I existe deux types de commandes de déplacements de outil : les commandes absolues et les
commandes incrémentielles (relatives).
G90 : Programmation absolue par rapport 4 Vorigine programme. La valeur programmée sur un
axe est repérée par rapport 4 Vorigine programme (OP).
G91 : Programmation relative par rapport au point de départ du bloc, La valeur programmée sur
un axe est repérée par rapport a la dernidre position programmeée.
Pour assurer Tusinage d’une piéce sur machine-outil commandée numériquement, le
programmeur peut recevoir le dessin de produit fini coté suivant deux modes,
GIO/IGIL Xo. Vou Zor Mee Bur Cov
X.. Yu Zu Au Be Cu Point datteindre.
= Propriétés des fonctions : Les fonctions G90 et G91 sont modales. La fonction G90 est
initialisée & la mise sous tension.
= Révocat
on : Les fonctions G90 et G91 se révoquent mutuellement.
-® Exemples de tournage :
+ Exemple 1
Veuillez indiquer Vitinéraire de mouvement de loutil ci-dessous par des méthodes de
positionnement absolu et positionnement relatif.
DAHMANIL. & HADJ BRAHIM B. 33
LIANA / Département GM.
Production par CN
Programme de positionnement absolu
G54 X200 2250
G00 X30 Z0
GOI X45 Z-20 F0.2
2-40
X60
Réglage du systéme de coordonnées.
Déplacez ’outil du point A au point B.
Coupe d’outil du point B au point C.
Coupe d’outil du point C au point D.
Coupe d’outil du point D au point E.
© Programme de positionnement incrémentiel ou relatif
G54 X200 2250
G00 U-170 W-250
GOL U1S W-20 F0.2
W-20 U1S
UIs
Réglage du systéme de coordonnées.
Coupe d’outil du point A au point B.
Coupe d’outil du point B au point C.
Coupe d’outil du point C au point D.
Coupe d’outil du point D au point E.
«= Exemple 2:
Soit la pidce définie par le dessin ci-dessous
Remplir le tableau suivant :
Point Programmation absolue G90
Programmation relative G91
Coordonnées en X | Coordonnées en Z | Coordonnées en X | Coordonnées en Z
a] of al a] >
DAHMANIL. & HADJ BRAHIM B.
34
ISE
SILIANA / Département GM.
Production par CN
+ Exemple 1 : Usinages en programmation absolue (G90)
00020
N30 $600 M03
N40 GOO X20 Y20 Z2 Point a, approche
NSO GOI Z-1.5 F50 Plongée sur Z
N60 X50 Y40 F120 Point b
N.
+ Exemple 2 : Usinages en programmation relative (G91)
00025
N30 $600 M40 M03
N40 GOO X20 Y20Z2 Point a, approche
NSO G91 GOI Z-3.5 F50_ Plongée sur Z
N60 X30 Y20 F120 Point b
N70
Go
4
OP
DAHMANIL. & HADJ BRAHIM B.
35
ISET SILIANA / Département GM Production par CN
3+ Programmation des déplacements
Programmation des
déplacements
Avitesse— Sens anti-
programmée: trigonométrique
Go Gor
a- Interpolation linéaire a vitesse rapide G00
G00 : Interpolation linéaire a vitesse rapide. Le point programmé est atteint en effectuant une
trajectoite linéaire a vitesse rapide. La trajectoire est la résultante de tous les déplacements
d’axes programmés dans le bloc.
N..G00 X..
X.Y. Z. Point datteindre
= Propriété de la fonction : La fonction G00 est modale.
+ La fonction G00 est révoquée par l'une des fonctions G01, G02 ou G03
p
00
i
"= Révocatior
b- Interpolation linéaire a vitesse d’avance programmée GOI
Le point programmé est atteint en effectuant une trajectoire linéaire & vitesse d’avance
programmée.
La trajectoire est la résultante de tous les déplacements des axes programmés dans le bloc.
DAHMANIL. & HADJ BRAHIM B. 36
ISET SILIANA / Département GM Production par CN
x
G01
N.
301 X.. Y.
(F.]
GOL : Interpolation linéaire a vitesse d’avance programmée.
X.Y.
F
Point & atteindre :
Vitesse d’avance,
" Propriétés de la fonction : La fonction GOI est modale et initialisée 4 la mise sous
tension,
+ Révocation : La fonction GOI est révoquée par l'une des fonctions G00, G02 ou G03.
c- Fonction pour le chanfrein et pour l’angle de Pare
Cette fonction est utilisée pour simplifier le codage du programme pour une section & angle
droit de la pigce de travail ayant un chanfrein de 45” ou des angles dares tangentiels dans le plan
X-Y. La commande pour le chanfrein et pour angle de are nécessite Ia commande de
déplacement G01 avec une valeur de déplacement supérieure 4 V'angle du chanfrein ou & la
valeur du rayon en amont.
Syntax
Y... C... Fis. 3 (chanfrein de 45°)
on de are)
* Application :
Y
5 95 100
DAHMANIL. & HADJ BRAHIM B. 37
ISET SILIANA / Département GM. Production par CN
N20 GOO X-22 Y30Z1
N25 GOI Z-2 (Point 1)
N30 G41
N35 GOL XS (Point 2)
N40 GOL Y55 R8 (Point 3)
N45 GOL X95 C10 (Point 4)
N50GOL Y5 C10 (Point 5)
NSS GOL X58 (Point 6)
N60 GOL Y32 (Point 7)
N65 GOI X-22 G40 (Point 8)
N70 GOO Z50
d- Interpolation circulaire
G02 : Interpolation circulaire sens anti-trigonométrique a vitesse d’avance programmée.
ox.
G03 : Interpolation circulaire sens trigonométrique a vitesse d’avance programmée,
dex
G03
= al
Nae
er] (G03}
DAHMANIL. & HADJ BRAHIM B. 38
ISET SILIANA / Département GM. Production par CN
La position du point programmé est atteinte en décrivant une trajectoire circulaire.
p
+ Application :
24.385) 50
N20 T0303
G96 $200 M03
G00 XO Z3 MO8
G42 GOI Z0 FO.2
G03 X20 Z-10 R10
GOI Z-50
G02 X100 Z-74.385 140 K20.615 : ou (G02 X100.0 Z-74.385
R45)
GOI Z-125
G40 U2 WI
G00 X200 2200 M09
M30
€- Choix du plan d'interpolation :
Deux axes lingaires pilotés dépendant du choix du plan d’interpolation (Fraisage uniquement) :
~ axes X (ou U) et Y (ou V) en G17,
= axes Z (ou W) et X (ou U) en G18,
~ axes Y (ou V) et Z (ou W) en G19.
DAHMANIL. & HADJ BRAHIM B. 39
ISET SILIANA / Département GM. Production par CN
Syntaxe (Plan XY) N... [G17] GO:
GI7 Choix du plan XY.
2/G03
Point a atteindre :
Position du centre de
interpolation dans le plan XY{(I suivant X, J suivant Y).
Rayon du cerck
interpoler.
r.. Vitesse d’avance.
XY GIT. G02/G03 X.Yodod. ou R,
IX GI8 —_G0O2/G03 X.Yobd. oR.
YZ G19. GO2/G03 XiYeukedn. OU Ri
+ Propriétés des fonctions : Les fonctions G02 et G03 sont modales.
= Révocation : _- La fonction G02 est révoquée par les fonctions G00, GOI ou G03.
- La fonction G03 est révoquée par les fonctions G00, GOI ou G02.
f Positionnement de outil par rapport 4 la pigce
Comme Voutil 4 un rayon, le centre de la trajectoire de cet outil est décalé de la valeur de son
rayon par rapport au profil de la pice. Si les rayons des outils sont mémorisés dans la CNC,
Youtil utilisé peut étre décalé par rapport la pigce de la valeur de son rayon. Cette fonction est
appelée fonction compensation de rayon de ’outil.
| Correction de rayon a gauche du profil :
G41
Correction de rayon. droite du profil:
Gaz
* Correction de rayon a gauche du profil a usiner G41
Les trajectoires outil programmées sont corrigées (décalées 4 gauche) d’une valeur égale au
rayon d’outil (R) déclaré par le correcteur D.
DAHMANIL. & HADJ BRAHIM B. 40
ISET SILIANA / Département GM. Production par CN
GAUCHE
(sens de la
‘correction }
GM
* Correction de rayon & droite du profil A usiner G42.
Les trajectoires outil programmées sont corrigées (décalées & droite) d’une valeur égale au rayon
doutil (R).
DAHMANIL. & HADJ BRAHIM B. 41
LIANA / Département GM. Production par CN
+ Annulation de correction de rayon G40.
Pilotage du centre de V’outil: les trajectoires programmées sont appliquées au centre de l’outil.
= Propriétés des fonctions : Les fonctions G40, G41 et G42 sont modales. La fonction G40 est
initialisée & la mise sous tension,
= Révocation : Les fonctions G41 et G42 se révoquent mutuellement. La fonction G40 révoque
les fonctions G41 et G42.
© Exemple en tournage : Correction de rayon suivant la position de la tourelle :
=i
x az
— cc
ot ea
Tourelle
avant
© Exemples en fraisage : correction de rayon en fraisage
G41.
4 | f
Ga1 Gaz Ga2
Y G
4 P g
» om L
Wh
Sans.correction G41 Gaz GA2 GAL
DAHMANIL. & HADJ BRAHIM B. 42
ISET SILIANA / Département GM. Production par CN
* Application :
00010
N10 GOO X-15 Y-15,
N20 G41 GOI XO YO F100
N30 Y40
N40 X30 Y80
N50 X60
N60 G02 X100 Y40 R40
N70 GOI Y30
N80 G03 X70 YO R30
N90 GOI XO
N100 X-15 Y-15
N110 G40
n
tesse de
rotation (tr/min)
G97.
Avance (mni/tr):
G95,
= [03/04]
)6 [X.] S... [M03/M04]
itesse de broche exprimée en tr/mn.
itesse de coupe constante exprimée en m/mn.
DAHMANIL. & HADJ BRAHIM B. 43
ISET SILIANA / Département GM. Production par CN
= Propriétés :
La fonction G97 est une fonction modale initialisée & la mise sous tension.
La fonction G96 est une fonction modale.
= Révocation :
La fonction G97 est révoquée par G96 S.
La fonction G96 est révoquée par G97 S...
+ Exemple :
N,
N100 G97 S900 M04 (Rotation de broche 4 900 tr/mn),
NiI0.... X50Z70 (Positionnement du nez de Voutil sur diamétre 50).
N120 G96 $200 (Initialisation de la V.C.C sur X=50).
N... G97 $900 (Annulation de V.C.C).
+ Remarque :
Concernant 'usinage en toumage avec vitesse de coupe constante et pendant une opération de
dressage, le diamétre tend vers
zér0. Alors il faut penser a limiter la vitesse de rotation maximale
avec la fonction G92.
"= Propriétés :
La fonction G92 est modale.
= Révocation :
La limite de la vitesse est annulée par
- La fonction d’annulation G92 $0.
- La fonction G92 S.... affectée d’une vitesse limite différente.
- La fonction de fin de programme M02.
~ Une remise a 'état initial (RAZ).
“+ Mouvement d’avance
Le mouvement de loutil & une vitesse spécifiée pour l'usinage d'une pice est appelé avance. Les
vitesses d'avance peuvent étre spécifiées & l'aide de chiffres réels. Par exemple pour déplacer
Youtil A une avance de 150 mm/mn il faut programmer ce qui suit: F150.0.
La fonction qui permet de définir ’avance est appelée fonction avance
= Syntaxe
N.. G95 F.. GOU/G02/G03 X..Z.. '
N. '
G94 F., GOI/G02/G03 X..Y.IX..Z.
DAHMANIL. & HADJ BRAHIM B. 44
ISET SILIANA / Département GM. Production par CN
+ Propriétés :
La fonction G94 est une fonction modale initialisée 4 1a mise sous tension.
La fonction G95 est une fonction modale.
* Révocation :
Les fonctions G94 et G95 se révoquent mutuellement.
+ Exemple 1 : (fraisage)
Nu.
NSO G00 X..Y.
N60 G94 F200 (Vitesse d'avance en mm/min).
N70 GOI X..Y..
N.
+ Exemple 2 : (tournage)
N.
N50 G00 X..Z..
N60 G95 FO.3 (Vitesse d'avance en mm/tr)
N70 GOI X..Z..
La commande G28 retoume rapidement l’outil de sa position actuelle vers le point dorigine
machine, en pass
int par un point intermédiaire. X, Y et Z sont les valeurs des coordonnées du
point intermédiaire qui servent de mécanisme de sécurité pour empécher les outils de percuter
n’importe quelle piéce, accessoire et appareillage sur son retour a sa position d'origine.
+ Syntaxe
690 G28 X...
G91 G28 X.
Z... 5 (mode de coordonnées relat
Za... 3 (mode de coordonnées absolues) |
es)
+ Exemple 1:
La position actuelle de ’outil est a (50, 25). Retour au point d’origine de la machine par un point
intermédiaire (250, 25) pour éviter tout impact sur la pice.
DAHMANIL. & HADJ BRAHIM B. 45
ISE
SILIANA / Département GM. Production par CN
Point de référence des axes X
et Y dela machine
—— Ae 4 (250,25)
+ Exemple 2:
G91 G28 ZO;
G91 G28 XO YO
-Retour sur l'axe Z au point d'origine de la machine
Retour sur l’axe X et sur I’axe Y au point d'origine de la machine.
Les principales fonctions préparatoires et auxiliaires (FANUC 21i tournage) sont classées dans le
tableau suivant
DAHMANIL. & HADJ BRAHIM B. 46
ISET SILIANA / Département GM. Production par CN
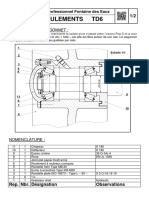
FANUC 21i tournage : Tableau des fonctions préparatoires G usuelles en tournage
Type | Groupe | Signification
Goo Déplacement rapide
Gor 1 Interpolation linéaire
G02 Interpolation circulaire (sens horaire)
Go3 Interpolation circulaire (sens anti-horaire)
Go4 ‘Temporisation et ouverture carter (pour nettoyer) (temporisation - suivi
de I'argument F ou X en secondes)
00
G10 Entrée de données programmable
Gu ‘Annulation du mode entrée de données programmable
Gi7 Sélection du plan X-Y
G18 16 Sélection du plan X-Z (par défaut)
Gy ‘Sélection du plan Y-Z
G20 06 Programmation en pouces
Gar Programmation en mm
G28 yg _| Retour la position dorigine
G30 Retour au 2, 3°, 4° point de référence
G50 Limitation de la vitesse maximum de broche
G52 00 | Décalage de Yorigine piece programmable
G53 Programmation par rapport & Vorigine machine
G65 00 | Appel de macro client
G66 Appel modal de macro client
G67 12 |"Annulation de Fappel modal de macro client
G70 Cycle de finition d'un profil
G7 Cycle d’ébauche axial
G72 00 Cycle d'ébauche radial
G73 Cycle d'ébauche par copiage
G76 Cycle de filetage
G80 ‘Annulation de eycle de pergage
G83 Cycle de pergage débourrage frontal
G84 00 | Cycle de taraudage frontal
G87 Cycle de percage latéral
G88 Cycle de taraudage latéral
G92 ol Cycle de filetage simple
Goa Vitesse d’avance (mm/min)
Gos qp__| Vitesse mm par tour (mmr)
G96 Vitesse de coupe constante (vitesse de surface constante)
G97 Vitesse de rotation en tours par minute
DAHMANIL. & HADJ BRAHIM B. a7
ISET SI
LIANA / Département GM. Production par CN
III- Les fonctions auxiliaires M
1- Commandes de broche
Gamme des vitesses Sens de rotation
Sens anti-
trigonométrique:
‘M03
‘Sens
trigonométrique:
Mos
- Commande du sens de rotation M03- M04
M40a
M45 M05
M03: Rotation de broche dans le sens anti-trigonométrique. La commande permet la mise en
rotation de la broche a la vitesse programmée,
M04: Rotation de broche dans le sens trigono
rotation de la broche a la vitesse programmée.
MOS : Arrét de broche. La commande arréte 1a rotation de la broche.
= Syntaxe : N..M03/M04/M05,
DAHMANIL. & HADJ BRAHIM B. 48
ISET SILIANA / Département GM. Production par CN
* Propriétés des fonctions : Les fonctions M03 et M04 sont des fonctions modales
«ayant» décodées. La fonction MOS est une fonction modale «aprés» décodée initialisée &
a mise sous tension.
+ Révocation : Les fonctions M03, M04 et MOS se révoquent mutuellement. Les fonctions
MO0, M19 et MOI (validé) révoquent les états MO3 ou M04.
2- Appel de Poutil
Lorsque des percages, des taraudages, des alésages, des fraisages et autres opérations
dusinage doivent étre effectuées, il est nécessaire de sélectionner un outil adéquat. Lorsqu'un
numéro est attribué 4 chaque outil et que le numéro est spécifié dans le programme, Voutil
correspondant est sélectionné.
M06 : Appel ou changement d’outil. La fonetion permet l'appel d’un outil et le positionnement
de celui-ci a son poste d’
nage.
La fonction «T» affectée d’un numéro sélectionne Voutil,
"Propriété de la fonction : La fonction M06 est une fonction non modale «aprés».
DAHMANIL. & HADJ BRAHIM B. 4g
LIANA / Départ
yent GM.
Production par CN
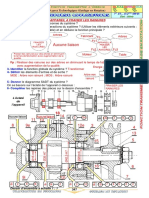
"Tableau des codes M usuels
Fanuc 21i Tournage. Tableau des codes M usuels
Type fication Fonction
M00 | Arrét programmé Apres
M01 | Arrét optionnel Apres
M02 | Fin de programme (identique 2 M30) Apres
M03__| Rotation broche sens horaire Avant
M04 | Rotation broche sens trigonométrique (ou anti-horaire) Avant
M05 | Anrét rotation broche Apres
M06 | Changement outil ‘Apres
M07 | Marche second arrosage ‘Avant
M08 | Marche arrosage principal ‘Avant
M09 | Arrét arrosage Apres
M19 | Orientation broche Aprts
M30 __ | Fin de programme (identique 4 M02) ‘Apres
M98__| Appel de sous-programme -
M99 | Retour de sous-programme Aprés
"Application
Ecrivez.le programme CN (FANUC) pour l'usinage en finition de la pice suivante.
L‘outil utilisé : Outil a charioter dresser finition : TO101 ;
Les conditions de coupe : Ve = 150 m/min ;
C1
8) 8 eg 8) 8
8) 8} 8 a8
15, 30 15
|» 78 ___|
DAHMANIL. & HADJ BRAHIM B. 50
ISET SILIANA / Département GM. Production par CN
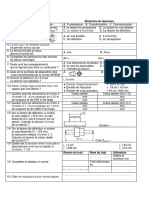
+ Tableau des fonctions préparatoires G usuelles en fraisage:
Fanuc 21i FRAISAGE. Tableau des fonctions préparatoires G usuelles
Type | Groupe ification
Goo 01 | Déplacement rapide
Go Interpolation lingaire
G02 Interpolation circulaire (sens horaire)
Go3 Interpolation circulaire (sens anti-horaire)
G04 00 | Temporisation et ouverture carter (pour nettoyer) (temporisation - suivi de
Vargument F ou X en secondes)
Go ‘Arrét précis,
G10 Entrée de données programmable
Git ‘Annulation du mode entrée de données programmable
Gis 17 | Annulation de la programmation en coordonnées polaires
G16 Programmation en coordonnées polaires (optionnel)
GI7 02 | Sélection du plan X-Y (par défaut)
Gis Sélection du plan X-Z.
G19 Sélection du plan Y-Z
G20 06 | Programmation en pouces
G21 Programmation en mm
G28 00 [Retour la position d'origine
G30 Retour au 2°", 3°”, 4°" point de référence
G50 11 | Annulation de la mise 4 échelle
G51 Mise & échelle
G50.1 22 | Annulation de Fimage miroir programmable
GSL1 Image miroir programmable
G52 00 | Décalage de lorigine pitce programmable
G53 Programmation par rapport aux zéro machines
GOs Appel de macro client
G66 12 | Appel modal de macro client
G67 ‘Annulation de Fappel modal de macro client
G68 16 |_ Rotation du systéme de coordonnées
G69 ‘Annulation de rotation du systéme de coordonnées
GB 09 | Cycle de pergage brise-copeaux
G74 Cycle de taraudage & gauche
G76 Cycle dalésage au grain
G80 Annulation de cycle
G81 Cycle de pergage simple
G82 Cycle de pergage lamage (avec temporisation)
G83 Cycle de pergage débourrage
G84 Cycle de taraudage & droite
G90 03 | Déplacements en coordonnées absolues
Gor Déplacements en coordonnées relatives
Goa 05. | Avances en millimétres/minute
G95 ‘Avances en millimétres/iour
G96 13 |_ Vitesse de coupe constante en métres/minute
G97 ‘Vitesse de rotation constante en tours/minute
Gos 10 |_ Retour au plan Z (lors de cycle)
G99 Retour au plan R (lors de cycle)
DAHMANIL. & HADJ BRAHIM B. st
ISET SILIANA / Département GM. Production par CN
+ Commande de coordonnées polaires (G15, G16)
Les coordonnées du centre de machine CNC peuvent étre définies par des coordonnées
cartésiennes ou par un sysime de coordonnées polaires (G16). Ce dernier donne les valeurs de
coordonnées en unité de rayon et en angle. Vous pouvez. utiliser la commande G15 pour annuler
effet de G16.Le sens plus de langle est le sens antihoraire du sens plus (+) du premier axe du
plan sélectionné, et le sens moins (-) est le sens horaire. L’angle et le rayon peuvent étre
solu et relatif (G90, G91).
programmés dans les deux modes,
G19 G16 Y..Z.
GIS;
G16: activation du mode de coordonnées polaires
G15: Annulation du mode de coordonnées polaires.
+ Exemple :
N75 G16
N80 G17G01 X50 Y30 (Point B)
N85 G15
4 Mise & I'échelle (G50, G51)
La commande G51 est congue pour augmenter ou pour réduire la trajectoire du programme
usinage, en référence au point P donné par le programme. Cela permet au méme programme de
gérer des produits de taille différente.
DAHMANIL. & HADJ BRAHIM B. 52
ISET SILIANA / Département GM. Production par CN
+ Syntaxe :
GSI X...
G50 ;
{51 ; Fonction de mise ’échell
G50 ; Annuler la fonction de mise I’échelle.
X... : Coordonnées de l’axe X du centre de la mise 4 échelle.
: Coordonnées de I’axe Y du centre de la mise a I’échelle.
Coordonnées de I’axe Z du centre de la mise a l’échelle.
Proportion de mise a ’échelle avec une fourchette de 0,111 ~ 999,999
avec saisie minimale d’unité de 0,001.
P1200 indique qu’il faut augmenter de 120%. P800 qu'il faut réduire de 80%.
Dans le cas ott les coordonnées (X... Y... Z...) sont contournées, le centre de la mise a I’échelle
est au point de commande du G51
= Exemple :
Codifier un programme avec la commande de mise 4 I’échelle pour augmenter l’échelle dune
pidce d’usinage avec les axes X, Y a 200%, comme le montre Ia figure ci-dessous.
Trajectoire du centre de y
Toutil aprés compensation
Zoom 4 150% des axes X et Y
06124
G40 G49 G80 G17 G21
NI TOI M06 (Fraise a queue 610).
G91 G30 Z0
G90 G54 GOO XO Y-40
G43 Z-3 HOI
$900 M03
G00 Z-8 MO8
DAHMANIL. & HADJ BRAHIM B. 53
ISET SILIANA / Département GM
Production par CN
G51X0 YO P2000
G90 G01 G42 XO Y-10 F150
G91 X20
G03 Y20 R10
GOI X-30
G03 Y-20 R10
GOI X10
G50
G40 X0 YO
G91 G28 Z0 MOS
Ga9
M30
mise 4 échelle simultané de Paxe X et Paxe ¥ & 200%
exécuter le programme d’augmentation de fraisage, insérez
Ja compensation du rayon vers la droite pour l’outil G42.
fin du programme d’usinage de mise 4 échelle
révoquer la fonction de mise a ’échelle.
révoquer la compensation de rayon, et remettre & zéro
Voutil au point d'origine,
+ Image miroir programmable (G50.1, G51.1)
La commande de coupe en miroir est congue pour usiner les pidces & g6ométrie symétrique.
Il permet d’éditer un programme
ial et le refléter avec la commande de coupe en miroir, pour
usiner une pice & lenvers, ou avec la gauche et la droite inversées, afin d’ économiser les efforts
de programmation.
Y ‘Axe de symétrie (X=50)
@
o
() Image Corigine des commandes programmées,
(2) Image symétrique par rapport une ligne paralléle a axe Y et coupant I’axe X 4 50,
(3) Image symétrique par rapport au point (50,50),
(4) Image symétrique par rapport & une ligne paralléle a I’axe X et coupant I’axe Y 4 50.
DAHMANIL. & HADJ BRAHIM B.
54
ISET SILIANA / Département GM.
Production par CN
utilisation d’une image miroir avec un des axes dans un plan déterminé change les commandes
ci-dessous comme suit :
eens
‘Commandes Les commandes G02 et G03 sont
ae devient G02,
Commandes de Les commandes G41 et G42 sont inversées. G41 devient G42 et G42
compensation devient G41.
Rotation des_Le sens de rotation est inversé. SH devient SAH et SAH devient SH.
coordonnées
= Exemple :
20.
2
8
x Zz
00006 NI10 GOI X42
NS TO1 M06 NIIS GOL Y8
N15 M03 $1800 N120GO1 X18
N20 GOO X50 Y-22 22 N125 G03 X8 Y18 RIO
N25 G00 Z-2 130 GO1 Y32
N30 GOI Y6 G41 F200 NI135 GOI X-6 G40
N35 GOL X6 C10 F400 G51.1 X50 YO Z0 1-1000
N40 GOI Y54. C10 G00 X-6 YO ZO
N45 GOI X94 C10 G00 Z-2
N50 GOI Y6 C10 GO1 X8 G41 H12 F200
N55 GOL X48 G01 ¥42 F400
N60 GOI Y-22 G40 G03 X18 Y52 R10
N65 GOO Z50 GOI x42
N70 T02 M06 G01 Y8
N80 M03 $2500 GOI X18
N85 G00 X-6 YO ZO G03 X8 Y18 R10
N90 GOO Z-2 GOI Y32
N95 GOI X8 G41 H12 F200 G01 X-6 G40
N100 GOI Y42 F400 G50.1
N105 G03 X18 Y52 R10 M30
DAHMANIL. & HADJ BRAHIM B. 55
ISET SILIANA / Département GM. Production par CN
= Corrections d'outil
Fanuc 21i - Tableau des corrections d’outil
Type | Signification
G40 Annulation de la compensation de rayon d’outil
G41 Compensation de rayon doutil & gauche
Gaz Compensation de rayon d'outil & droite
GB ‘Compensation de la longueur doutil dans le sens + (fraisage uniquement)
Gas Compensation de la longueur d'outil dans le sens - (fraisage uniquement)
Gao Annulation de la longueur util (fraisage uniquement)
+ Correction de la longueur de l’outil
La fonction correction de longueur d’outil traite la différence de longueur d’outil, en
compensant la longueur, aprés changement de V’outil au point origine de la machine. C’est
pratiquement une correction automatique d’outil sur l'axe Z pour un usinage en profondeur
rapide et facile de I’axe Z, cela en résolvant le probléme de la différence de longueur d’outil et
en simplifiant le programme d’usinage comme la montre la figure ci-dessous.
= Syntax
G43 GO0/GO1 Z... H..; (corriger la longucur d’outil dans un sens positif)
G44 G00/G01 Z... H... ; (corriger la longueur d’outil
G49 ; (Annuler la correction de longueur d’outil)
dans un sens négatif) '
Z... est la valeur des coordonnées de Voutil sur Vaxe Z ;
H... est le numéro de registre (00 ~ 99) oii est sauvegardée la valeur de correction. En |
e pour le |
mouvement sur I’axe Z de l’outil. G00 (positionnement rapide) est le meilleur choix dans Ia !
exécutant la correction de longueur d’outil, une commande G00 ou GOL est néce:
's cas.
plupart
eS
DAHMANIL. & HADJ BRAHIM B. 56
ISET SILIANA / Département GM. Production par CN
* Exemple :
Le programme, décrit ci-dessous, donne une illustration de l'utilisation de la commande de
correction de longueur G43. Voir le déplacement de outil sur ’axe Z, comme montré a la figure
suivante, avec une valeur de correction donnée HO1 = 35,0.
Position de l’axe Z
NOI X0 YO ZO; 35,00
N02 G90 GOO X50. Y40. ; 35,00,
N03 G43 ZS. HO1 ; (HO1=—35.) 5,00
N04 GOI Z-25. FLOO ; 25,00
N05 G00 G49 ZO ; 35,00
| b
'
(Hote-35)| “|
b Z25,0
YU Ws
* Les systémes de coordonnées
Fanuc 21i - Tableau des Origines pitces
Type Signification
G52 Décalage du systéme de coordonnées programmable
G53 Sélection temporaire du systéme de coordonnées machine (fonction non modale)
EXT Systéme de coordonnées servant a décaler TOUTES les origines ci-dessous
G54 Sélection du systéme de coordonnées numéro |
G55 Sélection du syst¢me de coordonnées numéro 2
G56 Sélection du systéme de coordonnées numéro 3
G57 Sélection du systéme de coordonnées numéro 4
G58 Sélection du systéme de coordonnées numéro 5
G59 Sélection du systéme de coordonnées numéro 6
+ Les systémes de coordonnées
I existe six syst#mes de coordonnées pices prédéfinis. Les systtmes de coordonnées sont
prédéfinis par utilisateur, et peuvent étre appelés dans le programme a tout moment, Chaque
origine piéce représente un décalage de ’origine machine
ce G54 est actif.
A la mise sous tension de la machine, le systéme de coordonnés pi
DAHMANIL. & HADJ BRAHIM B. 57
ISE
ANA / Département GM Production par CN
Un systéme de coordonnées (relatif), propre & chaque pice et décalé du systéme de coordonnées
machine (absolu). Le systéme de coordonnés permet dans le cas de pitces multiples mais
semblables, de créer en décalant ses origines, le systtme de coordonnées de chaque pice, le
programme restant le méme. Un eas typique d'utilisation de cette fonctionnalité, pour usiner trois
ilots identiques sur la méme pice, est illustré sur la figure ci-dessous.
G56 X
+ G55 X —J
/}— G54 x
1] a
fala
Les4 Y4
m-G56 Y
+—— G55 Y——_
Exereice 1 :
Eerire le programme d’usinage de la pice ci-dessous afin que outil effectue la découpe le long du
contour fini.
© Outil TO101
© Ve= 180m/min ;
0,15 mm/tr. La vitesse limite de rotation de la broche est 2500 tr/min.
DAHMANIL. & HADJ BRAHIM B. 58
ISET SILIANA/ Département GM Production par CN
00450 Numéro de programme
N10 G90 G92 $2500 Programmation absolue, limitation de la vitesse de rotation 4 2 500t/min.
N20G96S180G95 FO.15 M03] Régler la vitesse de découpe & 180m/
mise de la broche en rotation dans le sens horaire.
N30 TO101 Sélection de outil 01.
et de l'avance a 0,1Smmitr,
N40 G00 X29 22 Interpolation rapide, déplacer loutil vers le point de départ du
tournage (point d’approche).
N50 GOI Z-14,5 Interpolation linéaire vitesse d’avance programmée jusqu’au point
de coordonnées (X29, Z-14,5).
N60 G02 X40 Z-20 5,5 _| Interpolation circulaire dans le sens horaire jusqu’au point de
coordonnées (X40, Z-20).
N70 GOI Z-32 Interpolation linéaire & vitesse d’avance programmée jusqu’au point
de coordonnées (X40, Z-32).
N80 X44
N90 G03 X60 Z-40 RS Interpolation circulaire dans le sens horaire jusqu’au point de
Coordonnées (X60, Z-40).
N100 GOI Z-52
NILO X67
N120 G28 UO Wo MOS Retour automatique au point de référence et arrét broche
N130 M30 Fin programme.
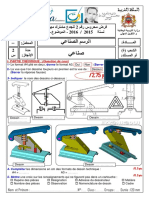
Exercice 2 :
On désire réaliser le contournage en
tion de la pice dont le dess
ion est donné par la
figure suivante.
© Contournage en finitio
© Ve= 120m/min
: Outil TOOL
0,15 mnvitr, La vitesse limite de la broche est 3000 tr/min,
1- Relever les coordonnées de tous les points 4 piloter dans le programme pour Pusinage de
cette pice.
Point | a b c a e f g h i
DAHMANIL. & HADJ BRAHIM B. 59
ISET SILIANA/ Département GM Production par CN
2- Proposer un programme en code FANUC permettant lusinage cette piéce sur un tour a
commande numérique.
Exereice 3:
Proposer un programme en code FANUC permettant usinage cette pice sur un tour a
commande numérique.
DAHMANIL. & HADJ BRAHIM B. 60
Vous aimerez peut-être aussi
- Initiation À La Fonderie 1ère AnnéeDocument23 pagesInitiation À La Fonderie 1ère Annéeyouness100% (1)
- TCP 03 Perspectives PDFDocument22 pagesTCP 03 Perspectives PDFBen Fah100% (1)
- CatalogDocument1 pageCatalogBen FahPas encore d'évaluation
- Nomen PhaseDocument2 pagesNomen PhaseBen FahPas encore d'évaluation
- TD6 RoulementsDocument2 pagesTD6 RoulementsBen Fah100% (1)
- TD Clavettes Et Les Paliers LissesDocument2 pagesTD Clavettes Et Les Paliers LissesBen FahPas encore d'évaluation
- TD2 RoulementsDocument1 pageTD2 RoulementsBen FahPas encore d'évaluation
- Cours Mécanique Du Solide PDFDocument78 pagesCours Mécanique Du Solide PDFAnonymous GuTrdmh07100% (6)
- 2100544632 (1)Document292 pages2100544632 (1)Saad Al HelyPas encore d'évaluation
- Analyser Temporelle Des PhasesDocument3 pagesAnalyser Temporelle Des PhasesBen FahPas encore d'évaluation
- FONCTION TRANSMETTRE L ÉNERGIE Aspect Technologique (Guidage en Rotation) Reponse Applications PDFDocument18 pagesFONCTION TRANSMETTRE L ÉNERGIE Aspect Technologique (Guidage en Rotation) Reponse Applications PDFBen Fah100% (3)
- Sciences Industrielles Pour L'ingennieur, Tout-En-UnDocument272 pagesSciences Industrielles Pour L'ingennieur, Tout-En-UnAyoub Marraha50% (2)
- GP Génie Des Procédés Des MateriauxDocument54 pagesGP Génie Des Procédés Des MateriauxBen Fah0% (1)
- Intro Chain e Numer I QueDocument57 pagesIntro Chain e Numer I QueBen FahPas encore d'évaluation
- TD Méca ForceCentraleDocument2 pagesTD Méca ForceCentraleBen FahPas encore d'évaluation
- Lave Linge SystemeDocument9 pagesLave Linge SystemeBen Fah100% (2)
- TD 1Document1 pageTD 1Ben FahPas encore d'évaluation
- Actions MécaniquesDocument19 pagesActions MécaniquesBen Fah100% (1)
- EvolutionDocument41 pagesEvolutionBen FahPas encore d'évaluation
- ( (Huflfh: /hvfdofxodwulfhvvrqwlqwhuglwhvDocument4 pages( (Huflfh: /hvfdofxodwulfhvvrqwlqwhuglwhvBen FahPas encore d'évaluation
- F0rmes UsuellesDocument3 pagesF0rmes UsuellesBen FahPas encore d'évaluation
- TP-Pièces en BoisDocument6 pagesTP-Pièces en BoisBen FahPas encore d'évaluation
- PerspectiveDocument17 pagesPerspectiveBen FahPas encore d'évaluation
- F0rmes UsuellesDocument3 pagesF0rmes UsuellesBen FahPas encore d'évaluation
- TCP Controle N2 2015 2016 ProjectionDocument4 pagesTCP Controle N2 2015 2016 ProjectionBen FahPas encore d'évaluation
- MECPT - 07 Anneau Sur Cercle en RotationDocument8 pagesMECPT - 07 Anneau Sur Cercle en RotationBen FahPas encore d'évaluation
- Guide-Invest Oleicole PDFDocument18 pagesGuide-Invest Oleicole PDFBen FahPas encore d'évaluation
- Plan D'action 2017Document96 pagesPlan D'action 2017Ben FahPas encore d'évaluation
- SADT Cours Etude Des Systemes 062016Document17 pagesSADT Cours Etude Des Systemes 062016Ben FahPas encore d'évaluation