Vous aimerez peut-être aussi
- Art No4 p-30-40 Indexation Et RechercheDocument12 pagesArt No4 p-30-40 Indexation Et RechercheRazafindradina Henri BrunoPas encore d'évaluation
- Memoire (AutoRecovered)Document14 pagesMemoire (AutoRecovered)Saber MezhoudaPas encore d'évaluation
- Chap1 Segmentation Par Contours ActifsDocument10 pagesChap1 Segmentation Par Contours ActifsChristina J. HaPas encore d'évaluation
- TPE DAS Groupe2Document21 pagesTPE DAS Groupe2DJELASSEM CYRILLEPas encore d'évaluation
- Canny Colin LevergerDocument12 pagesCanny Colin Levergerbouabidiyoussef1337Pas encore d'évaluation
- Article - Fidy - 1Document7 pagesArticle - Fidy - 1Razafindradina Henri BrunoPas encore d'évaluation
- Prepa tp2 VaDocument12 pagesPrepa tp2 VaSabrina regguemPas encore d'évaluation
- 02-Chapiter 02.v4.0Document14 pages02-Chapiter 02.v4.0abdelhalim.boudra05Pas encore d'évaluation
- Chap 6 Segmentation Par Détection de ContourDocument23 pagesChap 6 Segmentation Par Détection de ContourRomalio Dappe SopPas encore d'évaluation
- Extraction de Connaissances Pour La Description D'images Satellitaires À Très Haute Résolution SpatialeDocument6 pagesExtraction de Connaissances Pour La Description D'images Satellitaires À Très Haute Résolution SpatialeAbdelkader RabahPas encore d'évaluation
- Université Hassan 1erDocument50 pagesUniversité Hassan 1erarat100% (1)
- Chaptre 4 Vision Artificielle M2 ESE 2022Document59 pagesChaptre 4 Vision Artificielle M2 ESE 2022mustapha skanderPas encore d'évaluation
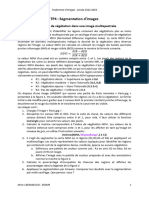
- TP4: Segmentation D'images: Exercice 1: Recherche de Végétation Dans Une Image MultispectraleDocument3 pagesTP4: Segmentation D'images: Exercice 1: Recherche de Végétation Dans Une Image Multispectraleamal ranounePas encore d'évaluation
- Acp 2DDocument13 pagesAcp 2DGata HipogataPas encore d'évaluation
- Cours - Data Science Intro+ACPDocument63 pagesCours - Data Science Intro+ACPsalma tn100% (1)
- Recherche Et Indexation Des ImagesDocument49 pagesRecherche Et Indexation Des Imageshalim allabPas encore d'évaluation
- Cours Image Processing 1Document34 pagesCours Image Processing 1Abderrahim AmchtahrirPas encore d'évaluation
- Cours Add MMBDSDocument25 pagesCours Add MMBDSAbdallahi SidiPas encore d'évaluation
- Chapitre 6 Segmentation D'imageDocument5 pagesChapitre 6 Segmentation D'imageKingsley BarosPas encore d'évaluation
- 06 SegmentationDocument62 pages06 SegmentationMohamed BakoukPas encore d'évaluation
- La Première PartieDocument22 pagesLa Première PartieAthmane BenfattoumPas encore d'évaluation
- BIOMEIC 2012 - PapierDocument6 pagesBIOMEIC 2012 - PapierBenomar AminePas encore d'évaluation
- Rapport TP Traitement D'imagesDocument15 pagesRapport TP Traitement D'imagesHamzaPas encore d'évaluation
- Cours SegmentationDocument111 pagesCours SegmentationMohssin OuafrasyPas encore d'évaluation
- Support de Cours Module ADD Univ Annaba (Tchi Drive)Document104 pagesSupport de Cours Module ADD Univ Annaba (Tchi Drive)br18Pas encore d'évaluation
- ArcGIS EF1Document36 pagesArcGIS EF1Said SaadaniPas encore d'évaluation
- Coursimage09 PDFDocument110 pagesCoursimage09 PDFWidad KarachiPas encore d'évaluation
- TreasureDocument4 pagesTreasurekhadija KARIMPas encore d'évaluation
- Exposi Detection de Contour D'une Image Niveaux de GrisDocument10 pagesExposi Detection de Contour D'une Image Niveaux de Griskeltoumtebbani2001Pas encore d'évaluation
- ts24 6 405-422Document18 pagests24 6 405-422safae afPas encore d'évaluation
- HamitatouDocument12 pagesHamitatouAli MezianePas encore d'évaluation
- Cours D'algèbre LinéaireDocument30 pagesCours D'algèbre LinéaireArbnorPas encore d'évaluation
- Poly Segmentation ENSTA BaillieDocument42 pagesPoly Segmentation ENSTA BaillieMariem CheikhrouhouPas encore d'évaluation
- IntroductionggggggDocument9 pagesIntroductionggggggHAKOUPas encore d'évaluation
- Chapitre III: Filtrage Numérique en Utilisant MatlabDocument30 pagesChapitre III: Filtrage Numérique en Utilisant MatlabMariam SajidPas encore d'évaluation
- Vision 1Document55 pagesVision 1ramzi ayadiPas encore d'évaluation
- CHAP1 - ACP Mni3i PDFDocument26 pagesCHAP1 - ACP Mni3i PDFMouhcine Zianee100% (1)
- Chapitre 2Document12 pagesChapitre 2housniredouane83Pas encore d'évaluation
- Trait ImageDocument16 pagesTrait ImageBin ZhangPas encore d'évaluation
- Algorithme de Jhon DaugmanDocument19 pagesAlgorithme de Jhon DaugmanZeid Hao100% (5)
- Imagerie Diapo5Document20 pagesImagerie Diapo5Ayman OubghachiPas encore d'évaluation
- Tritmen D'imageDocument7 pagesTritmen D'imageER-RAHMAOUY BRAHIMPas encore d'évaluation
- 1 Active Contours and ImageDocument19 pages1 Active Contours and ImageBoudaieb AhmedPas encore d'évaluation
- Chapitre2 PCADocument36 pagesChapitre2 PCAyosraghanmi23Pas encore d'évaluation
- Chapitre - 4.pdf Filename - UTF-8''Chapitre 4Document6 pagesChapitre - 4.pdf Filename - UTF-8''Chapitre 4wael zfPas encore d'évaluation
- Segmentation Par La Méthode Des Ensembles de Niveaux (Level Set)Document4 pagesSegmentation Par La Méthode Des Ensembles de Niveaux (Level Set)Dora DouaaPas encore d'évaluation
- Analyse Spatiale 2Document18 pagesAnalyse Spatiale 2cadeau01Pas encore d'évaluation
- Recherche Et Indexation Des ImagesDocument30 pagesRecherche Et Indexation Des Imageshalim allabPas encore d'évaluation
- Algorithmique 03c-1Document212 pagesAlgorithmique 03c-1mediPas encore d'évaluation
- SujetDocument1 pageSujetadam.metnic1Pas encore d'évaluation
- Multispectral DinetDocument8 pagesMultispectral DinetJosué Asciel MienmoyéPas encore d'évaluation
- Support de Cours - Deep Learning-Chapitre3-CnnDocument8 pagesSupport de Cours - Deep Learning-Chapitre3-Cnnkika boubaPas encore d'évaluation
- Exercice 1Document2 pagesExercice 1rayenPas encore d'évaluation
- Chapitre2 MLDocument63 pagesChapitre2 MLAhmed AjebliPas encore d'évaluation
- Traitement de ImagesDocument9 pagesTraitement de ImagesMohamed MidoPas encore d'évaluation
- Cours SegmentationDocument43 pagesCours Segmentationhabitav2023Pas encore d'évaluation
- Resume Traitement Numértique Des ImagesDocument23 pagesResume Traitement Numértique Des ImagesBadre OuzougarPas encore d'évaluation
- Vision stéréo par ordinateur: Explorer la perception de la profondeur dans la vision par ordinateurD'EverandVision stéréo par ordinateur: Explorer la perception de la profondeur dans la vision par ordinateurPas encore d'évaluation
- Diffusion anisotrope: Améliorer l'analyse d'images grâce à la diffusion anisotropeD'EverandDiffusion anisotrope: Améliorer l'analyse d'images grâce à la diffusion anisotropePas encore d'évaluation
- Data Viz GTD - DotxDocument1 pageData Viz GTD - Dotxdata studioPas encore d'évaluation
- Or 630de65fe39ecDocument1 pageOr 630de65fe39ecDidiss AzharPas encore d'évaluation
- RDFSDocument31 pagesRDFSdata studioPas encore d'évaluation
- Resource Description FrameworkDocument53 pagesResource Description Frameworkdata studioPas encore d'évaluation
- Atelier 2 RDFDocument2 pagesAtelier 2 RDFdata studioPas encore d'évaluation
- Atelier 1 RDFDocument6 pagesAtelier 1 RDFdata studioPas encore d'évaluation
- TP1 Prise en Main de Tableau - Data VizDocument10 pagesTP1 Prise en Main de Tableau - Data Vizdata studioPas encore d'évaluation
- Chapitre III PartA Version CorrDocument82 pagesChapitre III PartA Version CorrSamantha FarahPas encore d'évaluation
- M05 - Les Statistiques À Deux VariablesDocument44 pagesM05 - Les Statistiques À Deux VariablesABDOU FIT100% (1)
- Apprentissage Supervisé - Introduction - vf23Document38 pagesApprentissage Supervisé - Introduction - vf23shi ftPas encore d'évaluation
- Document From Jaber KhlieDocument3 pagesDocument From Jaber Khlieoussama khatrouniPas encore d'évaluation
- L Analyse Des Donn Es-1Document93 pagesL Analyse Des Donn Es-1GAMING WORLDPas encore d'évaluation
- Data Science For Business and FinanceDocument51 pagesData Science For Business and Financetouimar hamzaPas encore d'évaluation
- Rapport de Modèle de Marché PDFDocument31 pagesRapport de Modèle de Marché PDFAbdelfatah Joudani33% (3)
- Commerce International PDFDocument24 pagesCommerce International PDFryadPas encore d'évaluation
- Chronologique Actualisee1Document33 pagesChronologique Actualisee1Christian EhouanouPas encore d'évaluation
- Éléments de Statistique DescriptiveDocument19 pagesÉléments de Statistique DescriptiveSidoïne Bitho GbeteyPas encore d'évaluation
- Rapport v1Document36 pagesRapport v1Saad NAJARPas encore d'évaluation
- Prediction Des Proprietes Des Materiaux Par Apprentissage.Document58 pagesPrediction Des Proprietes Des Materiaux Par Apprentissage.BOULAHLIB ALDJIAPas encore d'évaluation
- Expose D'intelligenceDocument18 pagesExpose D'intelligenceouafo mandela100% (1)
- Bellahmer H.Document72 pagesBellahmer H.Armel YMGPas encore d'évaluation
- Stata ManuelDocument22 pagesStata Manuel.cadeau01100% (1)
- BasicsDocument2 pagesBasicsMonPlus Beau JourPas encore d'évaluation
- Choix Des Tests Et Analyses Statistiques V2Document88 pagesChoix Des Tests Et Analyses Statistiques V2carmen84100% (1)
- Exercices StatistiquesDocument8 pagesExercices StatistiquesHoussamHadifiPas encore d'évaluation
- Econométrie Cours de Bruno CreponDocument279 pagesEconométrie Cours de Bruno CreponOusmane SokhnaPas encore d'évaluation
- Introduction 1Document40 pagesIntroduction 1Lotfi BoussetlaPas encore d'évaluation
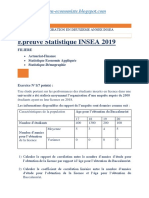
- Epreuve 2019 PDFDocument3 pagesEpreuve 2019 PDFAbdoulkarim100% (1)
- Projet Intelgence Artifficielle: Probleme de Calssification de Patients DiabetiqueDocument9 pagesProjet Intelgence Artifficielle: Probleme de Calssification de Patients DiabetiqueG . APas encore d'évaluation
- Eviews PDFDocument30 pagesEviews PDFAbdelilah LourhzalPas encore d'évaluation
- TD2 - Séries Statistiques A Deux Variables 2019-2020Document3 pagesTD2 - Séries Statistiques A Deux Variables 2019-2020Anes AnesPas encore d'évaluation
- TP4 Regression MultipleDocument4 pagesTP4 Regression MultipleLeila BensoudariaPas encore d'évaluation
- Modèle MarchéDocument7 pagesModèle MarchéAbdelouahed MettarPas encore d'évaluation
- Exercices Régression Simple PDFDocument23 pagesExercices Régression Simple PDFNoura DarifPas encore d'évaluation
- Chapitre II Machine LearningDocument161 pagesChapitre II Machine Learningoumayma bayarPas encore d'évaluation
- FISE2 Estimation IntroDocument19 pagesFISE2 Estimation Introthomas vwPas encore d'évaluation
- Cours Gestion BudgétaireDocument53 pagesCours Gestion BudgétaireNor Nor CH67% (6)