Vous aimerez peut-être aussi
- Bien débuter avec SQL: Exercices dans l'interface PhpMyAdmin et MySQLD'EverandBien débuter avec SQL: Exercices dans l'interface PhpMyAdmin et MySQLPas encore d'évaluation
- Chapitre 1 Systemes Micro Programmes A Base de Microprocesseur PDFDocument8 pagesChapitre 1 Systemes Micro Programmes A Base de Microprocesseur PDFloïc wankoPas encore d'évaluation
- Les macros avec OpenOffice CALC: La programmation BASIC pour tousD'EverandLes macros avec OpenOffice CALC: La programmation BASIC pour tousPas encore d'évaluation
- Nouveau Présentation Microsoft PowerPointDocument22 pagesNouveau Présentation Microsoft PowerPointmaiz100% (1)
- Systeme MicroDocument25 pagesSysteme MicroHafsa NouichPas encore d'évaluation
- Chapitre 2Document13 pagesChapitre 2Mehdi SellamiPas encore d'évaluation
- Chapitre1 Architecture - Ordinateurs - 2019 - 2020Document13 pagesChapitre1 Architecture - Ordinateurs - 2019 - 2020Bessem BessemPas encore d'évaluation
- Chapitre 1: Introduction Aux MicroprocesseursDocument26 pagesChapitre 1: Introduction Aux MicroprocesseursAbir HammamiPas encore d'évaluation
- Chap 2 Architecture Et Fonctionnement D'un MicroprocesseurDocument12 pagesChap 2 Architecture Et Fonctionnement D'un MicroprocesseurSamen Lempire100% (1)
- Cours-No-03 Calculateur Et InterfaçageDocument11 pagesCours-No-03 Calculateur Et Interfaçagestone freePas encore d'évaluation
- Cours DR ALI - ESATIC-GénéralitésDocument8 pagesCours DR ALI - ESATIC-GénéralitésMohamed CoulibalyPas encore d'évaluation
- Chapitre 2-1 - 115339Document6 pagesChapitre 2-1 - 115339Will Smith TaherPas encore d'évaluation
- Chapitre 1Document17 pagesChapitre 1louizini abderahmanePas encore d'évaluation
- Partie3 Generalites Sur MicroprocesseursDocument13 pagesPartie3 Generalites Sur MicroprocesseursKhadija HtPas encore d'évaluation
- Chapitre1 Microprocesseurs Et MicrocontroleursDocument14 pagesChapitre1 Microprocesseurs Et Microcontroleursmanale bouderbalaPas encore d'évaluation
- Chapitre 1Document13 pagesChapitre 1Ţhę JåşPas encore d'évaluation
- Cours 04Document2 pagesCours 04jaouad_kerPas encore d'évaluation
- Chapitre 3 - Le MicroprocesseurDocument26 pagesChapitre 3 - Le Microprocesseurarbaoui1167% (3)
- Cours Ci Chap1Document8 pagesCours Ci Chap1Amir DridiPas encore d'évaluation
- Du Microprocesseur À La Carte de Prototypage Partie 1: Microprocesseur Et MicrocontrôleurDocument4 pagesDu Microprocesseur À La Carte de Prototypage Partie 1: Microprocesseur Et MicrocontrôleurBsusnksPas encore d'évaluation
- CM Dui Ue3 ArchiDocument133 pagesCM Dui Ue3 ArchiMouhamed GueyePas encore d'évaluation
- Structure Systeme MicropDocument6 pagesStructure Systeme MicropLahoussine ElmahniPas encore d'évaluation
- Cours Microprocesseurs ENSADocument156 pagesCours Microprocesseurs ENSAAbdelkbir HadiouiPas encore d'évaluation
- Chapitre 2-1Document11 pagesChapitre 2-1bouchenebPas encore d'évaluation
- Support Cours MicrocontroleursDocument80 pagesSupport Cours MicrocontroleursJrk MukalayPas encore d'évaluation
- Chapitre 1Document45 pagesChapitre 1moumnimeryem2002Pas encore d'évaluation
- Cours Projet Electronique 1Document17 pagesCours Projet Electronique 1ryadhPas encore d'évaluation
- Partie-2-Microprocesseur + MemoireDocument14 pagesPartie-2-Microprocesseur + MemoireyaoPas encore d'évaluation
- Chap I Le Microprocesseur - 2020 PDFDocument11 pagesChap I Le Microprocesseur - 2020 PDFabnouPas encore d'évaluation
- Le MicroprocesseureDocument14 pagesLe Microprocesseuremayssemzinoubi610Pas encore d'évaluation
- Chapitre 02 Architecture Microprocesseur - LFSJG11Document19 pagesChapitre 02 Architecture Microprocesseur - LFSJG11Faïza TabbanaPas encore d'évaluation
- Programmation Des MicrocontroleursDocument108 pagesProgrammation Des MicrocontroleursHors ManPas encore d'évaluation
- CII3 ADocument8 pagesCII3 Abenamirasihem745Pas encore d'évaluation
- CHAPITRE 3 - RevisionQCMDocument23 pagesCHAPITRE 3 - RevisionQCMahmed fathallahPas encore d'évaluation
- Chapitre 2 Systemes A Base de Microprocesseurs - C2I2S - S1Document29 pagesChapitre 2 Systemes A Base de Microprocesseurs - C2I2S - S1Karym ElhoussinePas encore d'évaluation
- Chapitre 3 - 090738Document11 pagesChapitre 3 - 090738Rãmï RøÿãlPas encore d'évaluation
- Exposé Le MicroprocesseurDocument8 pagesExposé Le MicroprocesseurMamadou Seydou Diallo67% (6)
- Leçon N°1: Presentation de L'Informatique Industrielle Et Des Systemes Micro-Programmes I - L'Informatique IndustrielleDocument120 pagesLeçon N°1: Presentation de L'Informatique Industrielle Et Des Systemes Micro-Programmes I - L'Informatique IndustrielleFulbert FissouPas encore d'évaluation
- Cours Upge s11Document7 pagesCours Upge s11ufkfkf17Pas encore d'évaluation
- Informatique IndustrielleDocument16 pagesInformatique IndustrielleNo RayaPas encore d'évaluation
- Cours Microprocesseur ENSADocument138 pagesCours Microprocesseur ENSASheeya FilaliPas encore d'évaluation
- Systèmes Chap 12 Et 3Document10 pagesSystèmes Chap 12 Et 3Antoine LemlinPas encore d'évaluation
- Cours 2022Document88 pagesCours 2022Iheb BelhsanPas encore d'évaluation
- MicroprocesseurDocument34 pagesMicroprocesseurramzi ayadiPas encore d'évaluation
- Micro Control EurDocument59 pagesMicro Control EurSolo Netland100% (1)
- Chapitre V MicroprocesseurDocument10 pagesChapitre V MicroprocesseurMouhamed MoustaphaPas encore d'évaluation
- Cours Microcontrôleur Microprocesseur 32Document37 pagesCours Microcontrôleur Microprocesseur 32Frank EffeuzePas encore d'évaluation
- PIC LeçonN°1Document16 pagesPIC LeçonN°1Smart ClassePas encore d'évaluation
- Chapitre 3 - MicroDocument21 pagesChapitre 3 - MicroTayssir zayetPas encore d'évaluation
- Fonction Traitement de L'Information: Le MicroprocesseurDocument10 pagesFonction Traitement de L'Information: Le MicroprocesseurToniPas encore d'évaluation
- Chapitre2-Up 091701Document3 pagesChapitre2-Up 091701m875732Pas encore d'évaluation
- TP Info IndusDocument26 pagesTP Info IndusAmine MassawiPas encore d'évaluation
- Notes Cours 1 ELTDocument20 pagesNotes Cours 1 ELTwe 10Pas encore d'évaluation
- Chapitre 1 Lat 54Document6 pagesChapitre 1 Lat 54radiaPas encore d'évaluation
- Chap 1-Présentation de La MachineDocument41 pagesChap 1-Présentation de La MachineFlashPas encore d'évaluation
- Chapitre 2Document13 pagesChapitre 2baha.jamel32Pas encore d'évaluation
- CHAPITRE 1 - GéneralitésDocument9 pagesCHAPITRE 1 - GéneralitésZERARKA Mohamed FawziPas encore d'évaluation
- Cours PDocument27 pagesCours Pabderrahmane miliPas encore d'évaluation
- Cours-Architectures Des Processeurs-Mr Nizar TOUJANIDocument115 pagesCours-Architectures Des Processeurs-Mr Nizar TOUJANIIbtihel MechleouiPas encore d'évaluation
- Architectures RISC Et ExemplesDocument6 pagesArchitectures RISC Et ExemplesjuniorPas encore d'évaluation
- Chapitre 2 - Familles Des Circuits Intégrés Numériques (Logiques)Document26 pagesChapitre 2 - Familles Des Circuits Intégrés Numériques (Logiques)Ttech hackPas encore d'évaluation
- Chapitre 3 - Convertisseurs CAN-CNADocument12 pagesChapitre 3 - Convertisseurs CAN-CNATtech hackPas encore d'évaluation
- Ahmadou Hampaté Bah - Oui Mon Commandant - 1 PDFDocument423 pagesAhmadou Hampaté Bah - Oui Mon Commandant - 1 PDFtize brown100% (8)
- Fonctionnement Sécuritaire Des GénérateursDocument4 pagesFonctionnement Sécuritaire Des GénérateursTtech hackPas encore d'évaluation
- XML 3Document205 pagesXML 3youssef oulaPas encore d'évaluation
- Zehaf Aboubeker: ObjectifDocument2 pagesZehaf Aboubeker: Objectifzehaf aboubakerPas encore d'évaluation
- Java 4Document31 pagesJava 4Alassane BAPas encore d'évaluation
- Conception Surfacique (Avance) : GSD 3 JoursDocument1 pageConception Surfacique (Avance) : GSD 3 JoursMoustapha HELALIPas encore d'évaluation
- Sujet 1 Modelisation UML AVance CorrectionDocument2 pagesSujet 1 Modelisation UML AVance CorrectionJULIO STEPHANEPas encore d'évaluation
- Chapitre 1 & 2 Contrôle Interne & AuditDocument96 pagesChapitre 1 & 2 Contrôle Interne & Auditmonouche020% (1)
- DiplômeDocument2 pagesDiplômeIbrahim SumaïliPas encore d'évaluation
- Bizhub 362 282 222 - Ug - Print Operations - FR - 1 1 1Document412 pagesBizhub 362 282 222 - Ug - Print Operations - FR - 1 1 1Ali OuchnPas encore d'évaluation
- Notion SIGDocument4 pagesNotion SIGMou MenPas encore d'évaluation
- GL 3Document28 pagesGL 3Azza JradPas encore d'évaluation
- Classes 1Document41 pagesClasses 1Yaya TOUREPas encore d'évaluation
- Architecture de Lordi Net-311 Chap 1Document14 pagesArchitecture de Lordi Net-311 Chap 1stanislas nabelewaPas encore d'évaluation
- Celia Cruz Quimbara Piano Amp Bass - Compress PDFDocument7 pagesCelia Cruz Quimbara Piano Amp Bass - Compress PDFAlejo DuquePas encore d'évaluation
- Mise en Place D Une Application Securise PDFDocument85 pagesMise en Place D Une Application Securise PDFABBASSI RABAHPas encore d'évaluation
- COURS4 Fonction D ExecutionDocument51 pagesCOURS4 Fonction D ExecutionIkram ZiriPas encore d'évaluation
- Unified Modeling LanguageDocument30 pagesUnified Modeling LanguageCyrille LamasséPas encore d'évaluation
- Manuel de Nettoyage Des Donnes Lexmark - CX410Document11 pagesManuel de Nettoyage Des Donnes Lexmark - CX410NOVATEK MedninePas encore d'évaluation
- CV Rouass MohammedDocument1 pageCV Rouass MohammedMohamed RouassPas encore d'évaluation
- Excel 2000 Livret D Exercices 1Document102 pagesExcel 2000 Livret D Exercices 1Paulain LONFOPas encore d'évaluation
- Rediger Un Rapport TechniqueDocument9 pagesRediger Un Rapport Techniquefarid10100% (1)
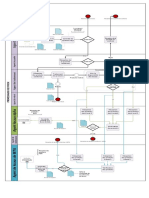
- BPMN Processus Gestion de StockDocument1 pageBPMN Processus Gestion de StockdaoPas encore d'évaluation
- GMD 01C V2021 12 13 Covadis - VRD BIM - Perfectionnement - V17 - 3JDocument1 pageGMD 01C V2021 12 13 Covadis - VRD BIM - Perfectionnement - V17 - 3Jvue d'anglesPas encore d'évaluation
- Syllabus Labo Web G2 ISPDocument117 pagesSyllabus Labo Web G2 ISPfrancis katunyasaPas encore d'évaluation
- Logical Volume Management (LVM) : Serveur Linux CentosDocument26 pagesLogical Volume Management (LVM) : Serveur Linux CentosChristopheProustPas encore d'évaluation
- Systeme de FichiersDocument9 pagesSysteme de FichiersJV JVPas encore d'évaluation
- ListesDocument5 pagesListesaimeblumen007Pas encore d'évaluation
- Art 01 DesignDocument10 pagesArt 01 DesignSenadheera PiyanwadaPas encore d'évaluation
- Peripheriques 221114 213148Document4 pagesPeripheriques 221114 213148Aaron Stifler ASPas encore d'évaluation
- Les Reseaux Sans FilsDocument71 pagesLes Reseaux Sans Filsniko94% (17)
- USEO Etude Réseaux Sociaux Tome2 v1 100126Document159 pagesUSEO Etude Réseaux Sociaux Tome2 v1 100126Michaël KaëlPas encore d'évaluation
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- Comment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.D'EverandComment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.Pas encore d'évaluation
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- La communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseD'EverandLa communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseÉvaluation : 5 sur 5 étoiles5/5 (1)
- Gestion de projet : outils pour la vie quotidienneD'EverandGestion de projet : outils pour la vie quotidienneÉvaluation : 5 sur 5 étoiles5/5 (2)
- Piraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéD'EverandPiraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéPas encore d'évaluation
- Explication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumD'EverandExplication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumPas encore d'évaluation
- La psychologie du travail facile à apprendre: Le guide d'introduction à l'utilisation des connaissances psychologiques dans le domaine du travail et des organisationsD'EverandLa psychologie du travail facile à apprendre: Le guide d'introduction à l'utilisation des connaissances psychologiques dans le domaine du travail et des organisationsPas encore d'évaluation
- NFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueD'EverandNFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueÉvaluation : 5 sur 5 étoiles5/5 (5)
- Kali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.D'EverandKali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.Évaluation : 5 sur 5 étoiles5/5 (1)
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- Créer Son Propre Site Internet Et Son Blog GratuitementD'EverandCréer Son Propre Site Internet Et Son Blog GratuitementÉvaluation : 5 sur 5 étoiles5/5 (1)
- Création d'une start-up à succès de A à Z: Réussir votre Start-up 2.0 Web et MobileD'EverandCréation d'une start-up à succès de A à Z: Réussir votre Start-up 2.0 Web et MobileÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Blockchain: Applications et compréhension du monde réel: Comment appliquer la Blockchain dans votre mondeD'EverandBlockchain: Applications et compréhension du monde réel: Comment appliquer la Blockchain dans votre mondePas encore d'évaluation
- Marketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxD'EverandMarketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxPas encore d'évaluation
- 101 idées pour travailler à domicile: Plus tous les conseils pour bien démarrerD'Everand101 idées pour travailler à domicile: Plus tous les conseils pour bien démarrerÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Dark Python : Apprenez à créer vos outils de hacking.D'EverandDark Python : Apprenez à créer vos outils de hacking.Évaluation : 3 sur 5 étoiles3/5 (1)