Académique Documents
Professionnel Documents
Culture Documents
Chap 1
Transféré par
blancheminensceTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Chap 1
Transféré par
blancheminensceDroits d'auteur :
Formats disponibles
Pg.
1
== PARTIE UN ===============================================================
MTHODES D'APPROXIMATION EN
PHYSIQUE
1 GNRALITS
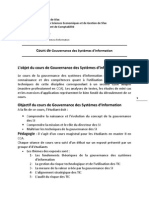
1.1 Processus d'analyse
De faon gnrale, les diffrentes tapes d'analyse dun problme physique s'organisent suivant le
processus schmatis par la figure suivante.
Modle mathmatique
Problme physique
Hypothses de
modlisation
Discrtisation
du problme
Estimation de la prcision du
modle numrique
- Vrification des hyp. de modlisation
(analyse du modle mathmatique)
- Interprtation des rsultats
Rponse obtenue
(Nouveau modle physique)
modle numrique
volution du
modle
mathmatique
volution du
modle numrique
Procdure
numrique
figure I.1 : Processus d'analyse utilisant un modle numrique
Nous partons d'un problme physique, le cadre prcis de l'tude est dfini par les hypothses
simplificatrices qui permettent de dfinir un modle mathmatique. La difficult pour l'ingnieur est de
savoir choisir parmi les lois de la physique celles dont les quations traduiront avec la prcision voulue la
ralit du problme physique. Un bon choix doit donner une rponse acceptable pour des efforts de mise
en oeuvre non prohibitifs.
Pg. 2 Mthode des lments finis
En rsum, les questions essentielles auxquelles l'ingnieur devra rpondre s'il veut effectuer une
analyse par un modle numrique dans de bonnes conditions, sont :
Quel modle mathmatique utiliser ?
Quel modle numrique faut-il lui associer ?
Quelle est l'erreur d'approximation commise ?
Quelle est l'erreur numrique commise ?
Peut-on amliorer le modle numrique ?
Faut-il changer le modle mathmatique ? etc ....
Illustration I-1: Quest ce quun modle
La figure suivante illustre sur un exemple mcanique simple trois modlisations
envisageables. Chacune d'elles correspond modle mathmatique diffrent, quelle est la
bonne?
Modle 2 : Elasticit plane
Solution numrique
F
Modle 1 : Poutre
Solution analytique
ou numrique
F
Modle 3 : Elasticit 3D
Solution numrique
F
Problme pos : dimensionnement statique
d'un support d'tagre
figure I.2 : Choix d'un modle mathmatique
Le choix du modle mathmatique est un compromis entre le problme pos l'ingnieur
"quelles grandeurs veut-on calculer et avec quelle prcision?" et les moyens disponibles pour y
rpondre. Les quations du modle retenu sont soumises un certain nombre d'hypothses bases
sur les sciences de l'ingnieur. Il faut connatre le domaine de validit de ces hypothses pour
pouvoir vrifier que la solution obtenue est satisfaisante.
Si le modle mathmatique n'admet pas de solution analytique, il faut chercher une solution
approche de ce modle. La discrtisation du problme correspond au choix d'un modle numrique
permettant de traiter les quations mathmatiques.
Il est important de savoir distinguer et hirarchiser les diffrents niveaux d'hypothses utiliss
pour modliser un phnomne physique. La solution exacte d'un modle mathmatique qui ne
correspond pas la ralit physique ne vaut rien.
Partie I : Mthodes dapproximation en physique pg .3
1.2 Mthodes dapproximation
Pour discrtiser les modles complexes de phnomnes physiques, l'ingnieur dispose l'heure
actuelle de mthodes d'approximation permettant de rsoudre la plupart des problmes pour lesquels il
n'existe pas de solution formelle.
Toutes les mthodes d'approximation ont un mme objectif, remplacer un problme
mathmatique dfini sur un milieu continu (quations diffrentielles ou intgrales) par un problme
mathmatique discret (quation matricielle). Problme de dimension finie que l'on sait rsoudre
numriquement.
La classification que nous proposons sur la figure suivante (figure I.3) n'est pas unique Elle permet
simplement de distinguer la mthode, en fonction de la dmarche utilise pour obtenir une forme
intgrale. La transformation puis la discrtisation de cette forme intgrale conduit une quation
matricielle que lon saura rsoudre analytiquement ou numriquement.
Il est important de noter qu'un problme physique peut tre formul de faon quivalente en un
systme d'quation diffrentielles ou sous une formulation variationnelle. Nous montrons un peu plus loin
comment passer de lune lautre.
Mthode des rsidus pondrs (ou annulation d'erreur) : Elle utilise comme point de dpart les
quations locales et les conditions aux limites du problme. Ces quations sont des quations
diffrentielles dfinies, d'une part sur l'intrieur du domaine ce sont les quations locales, et d'autre
part sur la frontire du domaine ce sont les conditions aux limites.
Mthodes variationnelles : Le point de dpart de ces mthodes est un principe variationnel qui
est une formulation mathmatique du problme base sur des considrations nergtiques. La
formulation obtenue dpend bien entendu des hypothses de modlisation du problme physique.
Mise en quations
"Formulation mathmatique
du problme (PFD)"
Systme physique
continu
Formes diffrentielles
Formes intgrales
Formes matricielles
Mthodes des
rsidus pondrs
Mthodes
d'approximation
Discrtisation
Mthodes
variationelles
"Formulation mathmatique
du problme (PTV)"
Figure I.3 : Vue synthtique des mthodes d'approximation
Pg. 4 Mthode des lments finis
2 MTHODE DES RSIDUS PONDRS
2.1 Principe de la mthode
Soit un problme physique d'inconnue le champ scalaire u(M) dfini sur un domaine D. Nous
cherchons une solution du modle mathmatique dfini par : les quations locales sur l'intrieur du
domaine D, et les conditions aux limites sur la frontire du domaine . Ces quations forment le systme
dquations diffrentielles suivant :
D M L( ) ( , ) u f M t quation locale
M C( ) ( , ) u e M t conditions aux limites
Le rsidu est l'erreur commise lorsque l'on utilise une approximation u* du champ u
pour crire les quations du problme.
Pour simplifier la prsentation, considrons dans un premier temps
- que les conditions aux limites du problme sont homognes : C( ) u 0
- que lapproximation choisie les satisfait toutes, 0 *) ( u C .
Le rsidu est alors dfini par l'erreur sur lquation locale, soit :
M D R L ( *) ( *) ( , ) u u f M t
Soit P
i
M ( ) des fonctions dites de pondration, quelconques, dfinies sur le domaine D
(fonctions tests, poids) . La mthode des rsidus pondrs consiste annuler lerreur commise sur le
rsidu, en la pondrant sur le domaine par un nombre fini de fonctions P
i
M ( ) .
Ce qui correspond des quations sous forme intgrale reprsentes par :
P
i
M ( ) P u dV
i
(M) R
D
( *)
0
Remarque : Du point de vue mathmatique, au lieu de rsoudre lquation R( ) u 0
on considre le problme quivalent R
D
( ) u dV
0
ne sachant pas rsoudre ce problme analytiquement, on en cherche une approximation en
restreignant les . n fonctions de pondration.
Pour une approximation u* n paramtres, nous choisirons n fonctions de pondration de
faon obtenir autant d'quations intgrales que de paramtres, cest--dire un systme matriciel
dordre n :
Soit une approximation de la forme : [ ]{ } u W q W q
i
M
i
n
i
t M t * ( ) ( ) ( ) ( )
1
- les W
i
M ( ) sont les fonctions de forme (base de fonctions utilise pour dfinir lapproximation)
- les q
i
t ( ) sont les paramtres de lapproximation.
Les n quations sont de la forme : [ ] i n 1, [ ]{ } P W q dV
i
(M) M t R
D
( ) ( ) ( )
0
Pour illustrer notre propos admettons que le problme soit un problme stationnaire linaire,
lquation matricielle est alors de la forme :
Partie I : Mthodes dapproximation en physique pg .5
[ ]{ } { } K q F avec
[ ] { } [ ]
{ } { }
K P W dv
F P f dv
M M
M M
'
( ) ( )
( ) ( )
( )
L
D
D
Si les n fonctions P
i
conduisent des quations indpendantes, la solution {q} du systme matriciel
prcdent fournit les paramtres de lapproximation.
Remarques
La recherche de fonctions dapproximation (fonctions de forme) satisfaisant toutes les conditions
aux limites supposes homognes nest pas simple (en pratique impossible pour des problmes
rels autres que les problmes acadmiques pouvant tre traits en TD). Il faut donc gnraliser
la formulation de cette mthode pour pouvoir utiliser des fonctions de forme moins riches,
cest--dire sans imposer lapproximation de satisfaire toutes les conditions aux limites.
Le choix des fonctions de pondration est a priori totalement libre (cela donne videmment de
plus ou moins bons rsultats), il faut cependant sassurer que les quations obtenues sont
indpendantes (rgularit du systme matriciel).
En pratique lutilisation de la mthode des rsidus pondrs se limite deux sous mthodes :
- mthode de collocation par point, cette mthode consiste utiliser comme fonctions de
pondration des diracs. Ce qui revient annuler lerreur dapproximation en un nombre fini de
points du domaine. Lintrt est vident: cest la simplicit de mise en uvre (le calcul de
lintgrale sur le domaine est vit). Par contre, les rsultats sont trs sensibles au choix des
points de collocation, et les matrices obtenues sont quelconques.
- mthode de Galerkin, cette mthode consiste utiliser comme fonctions de pondration
les fonctions de forme. Linconvnient rside dans le calcul de lintgrale sur le domaine. Par
contre, si les oprateurs sont symtriques, les matrices le sont galement, de plus, si le problme
est bien pos, nous sommes assurs de la rgularit du systme. Cette rgularit du modle
mathmatique assure des proprits de convergence de la solution cherche (l'approximation est
d'autant plus prcise que l'on augmente le nombre de paramtres).
Illustration I-2: Application de la mthode des rsidus pondrs
Considrons l'coulement stationnaire d'un fluide visqueux incompressible dans une
conduite cylindrique de section droite carre, de cot 2a. On pose :
" " coefficient de viscosit cinmatique du fluide.
" " la chute linique de pression dfinie par :
p p
2 1
!
avec ! : longueur effective du tube
Pression Pression
p
1
"
u
Section
"
z
"
x
"
y
a
a
p
2
Le champ des vitesses
" "
u u z est solution de:
quation locale M ( ) u
conditions aux limites
M
u 0
Soit une approximation 1 paramtre de la forme: u x a y a q x y * ( )( ) ( , )
2 2 2 2
, cette
Pg. 6 Mthode des lments finis
approximation satisfait les conditions aux limites sur la frontire. Le rsidu est donc dfini
par:
M R( *) u ( *) u
2
2
2
2
u
x
u
y
* *
+ 2 2
2 2 2
q x y a ( )
La mthode des rsidus pondrs nous donne une quation intgrale pour un paramtre
P x y ( , ) P(x y) q x y a dx dy , ( ) 2 2 0
2 2 2
+
1
]
1
Il suffit donc de choisir une fonction P pour obtenir une valeur du paramtre q. La solution
"q" dpendra du choix de la fonction de pondration.
Appliquons la mthode de collocation
au point (0,0) nous obtenons: q
a a
1
4
025
2 2
,
au point (a
/2
,a
/2
) nous obtenons: q
a a
1
3
0333
2 2
,
Appliquons la mthode de Galerkin
tous calculs faits ... nous obtenons: q
a
03125
2
,
Nous pouvons comparer ces rsultats avec la valeur de rfrence: -0,2947 obtenue par un
dveloppement en srie de Fourier 14 termes.
Afin d'amliorer la prcision on souhaite utiliser une approximation deux paramtres de la
forme : u W q W q x y (x,y) (x,y) * ( , )
1 2
+
1 2
avec W x a y a x y
1
2 2 2 2
( , ) ( )( ) et W W x y x y x y
2 1
2 2
( , ) ( , ) ( ) +
justifiez que cette approximation peut tre utilise avec la formulation intgrale prcdente
Donner la forme matricielle de l'quation correspondant la mthode de Galerkin.
! Le fichier Maple "pause I-2" vous permettra d'effectuer des simulations numriques sur cet
exemple. Vous pourrez comparer les mthodes et les rsultats obtenus en modifiant la
position des points de collocation ou les fonctions de forme. Essayez diffrentes possibilits
et analysez vos rsultats.
Nous venons de prsenter la mthode des rsidus pondrs lorsque les fonctions de formes satisfont
toutes les conditions aux limites homognes du problme (on parle alors de fonctions de comparaison du problme
homogne). Cette prsentation correspond une premire formulation intgrale. Elle ne permet de traiter
que des problmes simples (C.L. homognes) tel que celui de lexemple prcdent. Abordons maintenant des
problmes plus complexes.
Partie I : Mthodes dapproximation en physique pg .7
3 FORMULATION VARIATIONNELLE
Dans le paragraphe prcdent, nous avons construit une approximation de la solution du problme
mathmatique, en introduisant une notion d'erreur sur les quations locales du problme. Nous allons
maintenant prsenter une autre mthode d'approximation de la solution de ce mme problme
mathmatique, en partant de sa formulation variationnelle.
Nous rappelons tout d'abord les tapes de la construction de la formulation variationnelle! Reprenons
la dmarche gnrale qui vous a t prsente en premire anne dans le cours d'analyse applique c'est la
formule de Green gnralise
1
. Pour fixer les ides, considrons un problme de mcanique linaire :
analyse dynamique d'un systme mcanique continu non amorti en petits dplacements et petites
dformations
Lquation locale dfinie l'intrieur du domaine et les conditions aux limites dfinies sur la
frontire font apparatre des oprateurs diffrentiels. La forme gnrale du problme mathmatique
rsoudre est la suivante
2
:
quation locale D M
" "
"
##
u div f
conditions aux limites M
u
d
u u
" "
"
"
n T
d
Remarques :
Ici
"
u est un champ vectoriel dfini sur le domaine D
Pour pouvoir rsoudre ces quations il faudra leur associer les deux relations suivantes:
- Lois de comportement: fct( ) traduisent le comportement physique du matriau
- Relations gomtriques entre dplacements et dformations: grad u
s
"
Si bien que les quations locales peuvent tre mises sous la forme : f u u
"
"
# #
"
+ ) ( L
3.1 Transformation de la forme intgrale
Partons de lquation locale EL. : D M
" "
"
##
u div f
EL.
"
P 0 ) .(
dV f - ) ( v di u P
D
"
"
# #
"
"
L'ide est de faire apparatre dans cette premire forme intgrale les termes correspondant aux
conditions aux limites sur la frontire en effectuant une intgration par parties. Nous supposons que les
fonctions de pondration utilises sont suffisamment drivables.
Sachant que
3
: : ( ) ( ) . ( ) grad P div P P div
s
" " "
"
1
Voir la partie B du cours d'analyse applique de M. POGU
2
Voir le cours de Mcanique des milieux continus (MMC).
3
Cette formule utilise la symtrie du tenseur des contraintes et les relations suivantes:
: ( ) ( ) . ( ) grad u div u u div
T
" " " "
: ( ) ( ) . ( ) grad u div u u div
T
" " " "
La dmonstration de ces relations se fait simplement partir d'une relation indicielle de la forme suivante:
ij i j i ij j i ij j
u u u
, , ,
( )
Pg. 8 Mthode des lments finis
EL.
"
P 0 ) . ) ( ) : . ( +
dV f P - P div P ( grad u P
s
D
" " " "
# #
"
"
Appliquons le TH d'Ostrogradsky
4
:
EL.
"
P 0 ) . ( ) . ) : . ( +
dS n P dV f P - P ( grad u P
s
D D
"
" " " "
# #
"
"
Utilisons les conditions aux limites sur la frontire
: M
"
"
n T
d
'
sur C.Limites
EL." "
"
P suffisamment drivable
0 . . . ) . ) : . ( +
dS T P dS n P dV f P - P ( grad u P
d s
u
" "
"
" " " "
# #
"
"
D
En pratique, pour simplifier le calcul de l'quation intgrale prcdente, nous utiliserons des
fonctions de pondration valeur nulle sur la frontire
u
.
M
u
" "
P M ( ) 0 " 0 .
dS n P
u
"
"
Compte tenu de ces choix, nous obtenons uneformulation variationnelle du problme aux limites
initial.
conditions aux limites en dplacement M
u
d
u u
" "
P
"
fonctions de pondrations telles que
"
"
P o sur
u
dS T P dV f P - P ( grad u P
d s
. . ) . ) : . (
" " " " "
# #
"
"
D
Remarques:
Cette formulation variationnelle est quivalente au systme d'quations aux drives partielles.
Si nous pouvons rsoudre lquation intgrale prcdente, nous obtenons la solution exacte du
problme.
L'intrt de cette forme intgrale est de tenir compte de lquation locale et des conditions aux
limites en force, les conditions en dplacement devant tre satisfaites par ailleurs. Ce n'est en
aucun cas une ncessit, et nous aurions pu conserver les conditions aux limites en dplacement
dans la forme intgrale.
Dans la mthode des rsidus pondrs nous utilisons la premire forme intgrale (avant
transformation par intgration par parties) qui ne tient compte que de lquation locale. Ce qui limite son
utilisation des fonctions satisfaisant toutes les conditions aux limites du problme. Elles sont
donc plus difficiles obtenir, et gnralement impossible obtenir pour un problme non
homogne.
Notons enfin que la transformation de la forme intgrale diminue les conditions de drivabilit
du champ cherch, alors qu'elles sont plus strictes sur les fonctions de pondration.
4
TH d'Ostrogradsky: div(A) dV A.n dS
" "
"
D D
Partie I : Mthodes dapproximation en physique pg .9
3.2 Discrtisation de la forme intgrale
La solution approche du problme est recherche sous la forme d'une combinaison linaire de n
fonctions dites fonctions de forme. La mthode consiste alors affaiblir une des formes intgrales
prcdentes en ne la satisfaisant que pour n fonctions de pondration. Cette solution sera dautant
meilleure que la base de fonctions utilises sera riche, cest--dire permettant de bien reprsenter la
solution cherche.
Le choix de la forme intgrale point de dpart de la discrtisation avant ou aprs intgration par
parties dpend de la facilit construire une approximation qui satisfait les conditions aux limites du
problme Sil est possible de construire une approximation qui satisfait toutes les conditions aux limites
(fonctions de comparaison du problme) la premire forme intgrale est suffisante. Vous retrouvez la mthode des
rsidus pondrs prsente en dbut de ce chapitre.
En pratique nous construisons le plus souvent une approximation "
"
u *" satisfaisant les conditions
aux limites cinmatiques, une telle approximation est dite cinmatiquement admissible.
u* C.A. " M
u
d
u u
" "
* .
Remarque : Utiliser une approximation quelconque reviendrait chercher une solution approche
ncessairement loigne de la solution exacte. Or la construction d'une approximation satisfaisant
les conditions aux limites gomtriques est gnralement relativement simple.
Pour une approximation cinmatiquement admissible, lerreur porte la fois sur lquation locale et sur
les conditions aux limites en force. La forme intgrale de dpart est alors la formulation variationnelle du
problme tablie prcdemment.
Avantages d'utiliser la formulation variationnelle:
La construction de l'approximation est plus simple, les conditions aux limites sur
nont pas lieu
d'tre satisfaites par les fonctions de forme car elles sont prises en compte dans la formulation
intgrale.
Le nombre de drivations des fonctions de forme diminue.
Inconvnients:
Le nombre de drivations des fonctions de pondration augmente, et leur choix est restreint car nous
avons choisi des fonctions de pondration valeur nulle sur la frontire
u
pour simplifier la forme
intgrale (ce qui n'est en aucun cas une ncessit).
Lerreur dapproximation sera plus importante si les fonctions de forme ne satisfont pas les conditions
aux limites sur
.
criture matricielle des quations
Pour simplifier la prsentation, considrons que les conditions aux limites gomtriques sur
u
sont
de la forme
" "
u o * .
Nous utilisons les mmes fonctions de forme pour dfinir lapproximation et les fonctions de
pondration (mthode dite de Galerkin). Ce qui nous conduira des formes matricielles symtriques.
Soit:
Pour l'approximation : { } [ ] { } u W q M t M t * ( , ) ( ) ( )
avec: [ ] W M ( ) la matrice construite partir des fonctions de forme
{ } q t ( ) le vecteur des paramtres de lapproximation.
La forme matricielle des fonctions de pondration est alors :
{ } [ ] { } P W q M M ( ) ( )
Pg. 10 Mthode des lments finis
Pour > < ,.... 0 , 0 , 1 q nous obtenons
1 1
W P
Pour > < ,.... 0 , 1 , 0 q nous obtenons
2 2
W P
Etc
Pour > < 1 ,., 0 , 0 , 0 q nous obtenons
n n
W P
Pour exprimer le produit *: ) grad (P
s
"
, nous utilisons les formes matricielles associes aux lois
de comportement du matriau et aux relations entre dformations et dplacements.
Posons :
{ } [ ]{ } ( ) ( ) ( ) M M M D forme matricielle des lois de comportement
avec: { }
T
xx yy zz xy xz yz
< > , , , , , 2 2 2
{ }
T
xx yy zz xy xz yz
< > , , , , ,
{ }
{ }
[ ] { } ( ) ( ) ( ) M
s
M M grad u L u
"
[ ] L est la matrice d'oprateurs diffrentiels correspondant l'expression du
gradient symtrique du champ des dplacements.
Compte tenu de ces notations le produit
*: ) grad (P
s
"
={ } [ ] [ ] [ ] { } P L D L u M
T T
M M ( ) ( ) ( ) *
Soit compte tenu de l'approximation:
*: ) grad (P
s
"
={ } [ ] [ ] [ ] { } q B D B q
T
M
T
M M t ( ) ( ) ( ) ( )
avec
[ ] [ ] [ ]
B L W M M ( ) ( )
Reportons ces expressions dans la formulation variationnelle nous obtenons:
{ } [ ] [ ]{ } [ ] [ ] [ ]{ } [ ] { } { } [ ] { }
q W W q B D B q W f dV q W T dS
T T T T T T
d
( ## ) +
D
cette quation pouvant tre crite quelque soit { } q nous obtenons l'quation matricielle suivante :
[ ] { } [ ] { } { } M q K q F ## +
avec: [ ] [ ] [ ]dV W W M
T
[ ] [ ] [ ] [ ] K B D B dV
T
D
{ } [ ] { } [ ] { } F W f dV W T dS
T T
d
+
D
Ce qui vient dtre appliqu un problme de mcanique classique peut tre fait dans d'autres
domaines de la physique. Dans la pause d'illustration suivante, nous prsentons la formulation
variationnelle de l'quation de Poisson, comme vous le verrez la dmarche est rigoureusement la mme.
Illustration I-3: Formulation variationnelle de lquation de poisson.
Reprenons l'exemple de l'coulement stationnaire prsent dans la pause N2
Partons de l'intgrale
Partie I : Mthodes dapproximation en physique pg .11
I P(x y) u dS
, * ) (
Compte tenu que: div P grad u P u grad P grad u ( ( *) ) * ( ). ( *)
" " "
+
I div P grad u P grad P grad u dS
( ( ( *)) ( ). ( *) )
" " "
Le TH d'Ostrogradsky nous conduit :
I P grad u n d grad P grad u P dS
)
"
"
!
" "
( *). ( ). ( *)
soit: I P
u
n
d grad P grad u P dS
*
( ). ( *) ) !
" "
Utilisons l'approximation un paramtre de la forme : u W q x y (x,y) * ( , )
1
1
avec W x a y a x y
1
2 2 2 2
( , ) ( )( )
la fonction de pondration P W x y x y ( , ) ( , )
1
vrifie : M P M ( ) 0
La formulation variationnelle conduit la l'quation intgrale suivante:
grad P grad u dS P dS
" "
( ). ( *)
Posons[B] la matrice correspondant au gradient des fonctions de forme:
[ ]
[ ]
B grad W
W
x
W
y
x y a
y x a
M
'
'
"
( )
( )
( )
( )
1
1
2 2
2 2
2
2
L'quation matricielle se rduit ici une quation scalaire de la forme : k q = f
avec [ ] [ ] k B B dS
T
et f P dS
-
tous calculs faits ... nous retrouvons les rsultats obtenus dans la pose d'illustration N2
Pour vous tester; donner la forme matricielle de l'quation correspondant une
approximation deux paramtres en explicitant la matrice [B].
! Le fichier Maple "pause I-3" vous permettra d'effectuer des simulations numriques sur cet
exemple et vous pourrez comparer les rsultats avec vos calculs.
remarque: Nous avons utilis au cours des illustrations 2 et 3 les mmes fonctions de forme pour
dfinir l'approximation. Il en rsulte que les deux formes intgrales avant l'intgration par
parties, et aprs Ipp conduisent des rsultats identiques.
Pg. 12 Mthode des lments finis
4 PRINCIPE DES TRAVAUX VIRTUELS
Dans certains domaine de la physique, des considrations nergtiques permettent la formulation du
problme en tant que principe variationnel, aboutissant ainsi une formulation intgrale. L'intrt de ces
principes est de fournir directement la forme intgrale sans avoir passer par les quations aux drives
partielles comme nous l'avons fait dans le cadre des mthodes variationnelles.
La formulation mathmatique du principe est base sur les mmes hypothses de modlisation du
problme physique. En mcanique des structures le principe le plus couramment utilis est le principe des
travaux virtuels en dplacement dont nous rappelons ci dessous la formulation.
4.1 criture du principe des travaux virtuels
Partons du principe tel qu'il a t nonc en mcanique classique.
Pour tout systme matriel D en mouvement par rapport un repre Galilen.
Pour tout dplacement virtuel
"
u
5
tout instant A T
avec:
A travail virtuel des quantits d'acclration
=
" " " "
( ) ( ) . ( .
##
P P u dm u u dV
D D
T travail virtuel des efforts intrieurs et extrieurs
= + +
: . . .
D D
dV u f dV u T dS
"
"
"
"
D
Compte tenu des relations dplacements - dformations grad ( u
s
"
) , nous obtenons la forme
1 du PTV.
"
u
" " " "
"
"
"
u u dV grad u dV u f dV u T dS
s
.
##
: ( ) . . .
D D D D
+ +
On peut ds prsent constater que cette quation intgrale concide avec la formulation
variationnelle du problme tablie au paragraphe 3.1, ce n'est videmment pas un hasard. Nous allons
transformer cette forme intgrale par intgrations par parties, ce qui nous permettra de retrouver l'quation
locale et les conditions aux limites du problme. Vous notez que la dmarche est rigoureusement l'inverse
de celle utilise dans le paragraphe prcdent.
Rappelons que
6
: : ( ) ( ) . ( ) grad P div P P div
s
" " "
"
Utilisons cette relation pour crire le PTV:
5
Nous utilisons ici les notations des cours de Mcanique et MMC pour le dplacement virtuel
"
u , mais il est courant
de rencontrer dans la littrature la notation
"
u * qu'il ne faut pas confondre avec l'approximation du champ u.
6
Voir paragraphe 2.2
Partie I : Mthodes dapproximation en physique pg .13
div( +
" " "
"
" "
"
u u div f dV u dV u T dS .(
##
( ) ) ) . .
D D D
Appliquons le TH d'Ostrogradsky, nous obtenons:
"
u
" " "
"
"
"
"
u u div f dV u T n dS .(
##
( ) ) .( )
D D
Pour un champ de dplacements cinmatiquement admissible nous avons :
M
u
" "
u o
La forme intgrale prcdente nous permet de retrouver :
L'quation locale : D M
" "
"
##
u div f
Les conditions sur les efforts donns : M
"
"
n T
d
La boucle est ferme, nous sommes au point de dpart des mthodes variationnelles. Il y a
quivalence entre le PTV et le systme dquations diffrentielles : quations locales et conditions aux
limites du problme.
4.2 Discrtisation du principe des travaux virtuels
La "discrtisation" du PTV consiste utiliser une approximation pour exprimer le champ des
dplacements et le champ des dplacements virtuels. En pratique, nous utilisons la mme approximation
ce qui permet d'obtenir une expression matricielle symtrique.
Avant d'utiliser l'approximation prcisons la nature des conditions aux limites, pour exprimer
l'intgrale sur la frontire du domaine :
"
"
"
"
"
"
u T dS u T dS u T dS
I d
u
. . . .
D
+
Cette criture fait apparatre explicitement le champ des efforts inconnus (TI : actions de liaison)
correspondant aux conditions aux limites cinmatiques. M
u
" "
u u
d
Si nous utilisons une approximation quelconque du champ des dplacements, nous obtenons une
quation intgrale pour deux champs inconnus, et nous ne pourrons pas rsoudre le problme. Cette
mthode sapparente la mthode des multiplicateurs de Lagrange. Pour rsoudre, il faut tenir compte a
posteriori des conditions aux limites cinmatiques dans les quations du modle.
Si nous utilisons une approximation dite cinmatiquement admissible, nous obtenons la mme
quation intgrale que celle dduite de la mthode variationnelle crite dans les mmes conditions :
"
u * cinmatiquement admissible (
" "
u u
d
* et
" "
u o * sur
u
)
" " " "
"
"
"
u u dV grad u dV u f dV u T dS
s d
*.
##
* : ( *) *. *.
D D D
+ +
Nous utilisons les mmes notations matricielles que celles introduites dans le paragraphe 3.2
Pour l'approximation: { } [ ] { } u W q M t M t * ( , ) ( ) ( )
# { } [ ] { } u W q M M *( ) ( )
Pour les lois de comportement: { } [ ]{ } ( ) ( ) ( ) M M M D
Pour les relations dformations - dplacements: { } [ ] { } ( ) ( ) M M L u
Pg. 14 Mthode des lments finis
Reportons ces expressions dans la forme intgrale du PTV. Cette quation pouvant tre crite quel
que soit { } q , nous obtenons l'quation matricielle suivante :
[ ] { } [ ] { } { } M q K q F ## +
avec: [ ] [ ] [ ] M W W dV
T
[ ] [ ] [ ] [ ] K B D B dV
T
D
avec
[ ] [ ] [ ]
B L W M M ( ) ( )
{ } [ ] { } [ ] { } F W f dV W T dS
T T
d
+
D
Dans la pause d'illustration suivante nous appliquons ce qui prcde au modle mcanique le plus
simple, la barre en traction - compression.
Illustration I-4: criture du PTV pour un problme de traction - compression.
!
k
( , ) ES S
"
x
o
o A
Rappels des hypothses de modlisation:
petits dplacements
" "
u u x M t x t
o
( , ) ( , )
petites dformations
xx x
u
,
milieu homogne isotrope lastique
xx xx
E
criture du PTV
Compte tenu de ces relations le PTV s'crit :
"
u
## ( )( ) ( ) ( , ) ( ) ( ) u u Sdx u u ESdx k u u u u F u F u
o o
A t A
o o A A
+ +
,x ,x
! !
! !
Utilisons un champ de dplacement virtuel cinmatiquement admissible -> u o
o
et u o
A
Le PTV se rduit :
"
u cinmatiquement admissible
## ( ) ( ) ( , ) ( ) u u Sdx u u ESdx k u u u
o o
A t
,x ,x
! !
! !
+ (1)
Approximation un paramtre
soit l'approximation un paramtre u x q x t t * ( , ) ( ) " u x q x ( )
cette approximation est cinmatiquement admissible, nous pouvons utiliser le forme (1) qui
nous conduit l'quation suivante:
q q S x dx q ES dx k q
o o
2 2
0
! !
!
+ +
_
,
## ( )
Partie I : Mthodes dapproximation en physique pg .15
soit : mq kq ## + 0 avec
m
S
k ES k
'
!
! !
3
2
3
posons
ES
k!
L'approximation de la premire pulsation propre est
1 2
31
+ ( )
E
!
Pour pouvoir comparer avec la solution analytique prenons 10.
La solution analytique est alors:
1 2
1632 ,
E
!
et l'approximation
1 2
1817 ,
E
!
soit une erreur de 11%.
Cette erreur est importante car l'approximation n'est pas assez riche.
Approximation deux paramtres
soit l'approximation cinmatiquement admissible : [ ]{ } u x q x q W q x t x t * ( , ) ( ) ( ) +
1
2
2
nous obtenons : [ ] K
ES
k
1
]
1
+
1
]
1
!
!
! !
!
!
! ! 3
3 3
3 4
1
2
2
2
[ ] M
S
1
]
1
!
!
! !
3
2
60
20 15
15 12
d'o l'approximation des deux premires pulsations propres
1 2
2 2
1638
5725
'
,
,
E
E
!
!
l'erreur sur l'approximation de la premire pulsation est de 0,4% ce n'est pas si mal pour un
modle deux degrs de libert.
! Le fichier Maple "pause I-4" vous permettra de suivre les tapes de calcul des matrices
masse et raideur et d'effectuer des simulations numriques plus compltes sur cet exemple.
Vous pourrez augmenter le nombre de paramtres ou modifier les fonctions de forme pour
analyser la convergence des rsultats.
Remarque : quivalence PTV quation local + Conditions aux limites
Reprenons lcriture du PTV :
## ( ) ( ) ( , ) ( ) u u Sdx u u ESdx k u u u
o o
A t
,x ,x
! !
! !
+ (1)
Effectuons une intgration par parties du travail virtuel des efforts intrieurs :
u u ESdx
o
,x ,x
!
=
[ ]
+
,x ,x ,x
ESu u ESu u dx
o
o
!
!
( )
Pour un champ de dplacement C.A. u o
o
et u o
A
. Nous en dduisons la forme 2 du
PTV:
Pg. 16 Mthode des lments finis
u Su ESu dx - u ku ESu
o
t t
,xx ,x
( ## ) ( ) ( ) ( , ) ( , )
!
! ! ! (2)
Cette forme nous permet de retrouver :
l'quation locale ] [ x o,! " Su ESu ##
,xx
0
et les conditions aux limites en x ! " ku ESu t t ( , ) ( , ) ! !
,x
0
En pratique c'est la forme (1) du PTV qui sera utilise pour faire les calculs car elle est
symtrique en u et u et l'ordre de drivation des fonctions est moins important.
Vous aimerez peut-être aussi
- Ashley Sivil CVDocument2 pagesAshley Sivil CVapi-200670817Pas encore d'évaluation
- Faits Documents PDFDocument2 pagesFaits Documents PDFBrandonPas encore d'évaluation
- CV Kevin Guei 2019Document2 pagesCV Kevin Guei 2019KévinYoanGueïPas encore d'évaluation
- 41 Siemens Step7 Manager Tutorial Rev04Document27 pages41 Siemens Step7 Manager Tutorial Rev04Мхамед Аит Абдерахман100% (1)
- SWEP01 SoaBS FR PRINT PDFDocument40 pagesSWEP01 SoaBS FR PRINT PDFRom PrettydwarfPas encore d'évaluation
- Module SysasserviDocument71 pagesModule SysasserviBelkacem NadirPas encore d'évaluation
- Activ 2Document1 pageActiv 2mister633Pas encore d'évaluation
- Planification Radio D'un Reseau 3GDocument60 pagesPlanification Radio D'un Reseau 3GSif Eddine Sellami83% (12)
- Plan Du CoursDocument3 pagesPlan Du CoursJamel ChouaibiPas encore d'évaluation
- TP Csi 2010 2011Document31 pagesTP Csi 2010 2011alainPas encore d'évaluation
- Sim201 7 C++11Document25 pagesSim201 7 C++11BlooD LOVERPas encore d'évaluation
- Chap 7Document21 pagesChap 7Elaasry AbdellahPas encore d'évaluation
- Livret 4A Cahier Cours-FINALDocument160 pagesLivret 4A Cahier Cours-FINALHmidi Fredj100% (7)
- Modulation GSM UMTSDocument20 pagesModulation GSM UMTSMathieu BolléPas encore d'évaluation
- Cours de MétrologieDocument67 pagesCours de Métrologiedomgue lorraine ildaPas encore d'évaluation
- CV Ismail LyakoubiDocument2 pagesCV Ismail LyakoubiasmaePas encore d'évaluation
- Adie Catalogue de Services 2016Document64 pagesAdie Catalogue de Services 2016serignemodouPas encore d'évaluation
- Instructivo para Calculo de Volumnes de TanquesDocument16 pagesInstructivo para Calculo de Volumnes de TanquesLuz MainoPas encore d'évaluation
- Cours IA Chapitre2Document64 pagesCours IA Chapitre2Zeindine AhmednahPas encore d'évaluation
- Cours ScriptDocument7 pagesCours ScriptDjo MounirPas encore d'évaluation
- Veille ConcurrentielleDocument4 pagesVeille ConcurrentielleLalita_31Pas encore d'évaluation
- ST Tutor3 Python Scikit PDFDocument11 pagesST Tutor3 Python Scikit PDFAlioune GayePas encore d'évaluation
- Exercices Subjonctif Complétives - IsabelDocument3 pagesExercices Subjonctif Complétives - IsabelPaula Gomez GarciaPas encore d'évaluation
- SpringBatch PDFDocument12 pagesSpringBatch PDFSalma SekkatPas encore d'évaluation
- 2eme Partie Chapitre 4 Gestion Du Temps - Cours EOE 1ere BAC SEGDocument6 pages2eme Partie Chapitre 4 Gestion Du Temps - Cours EOE 1ere BAC SEGSy-Mohammed Azzouzi100% (3)
- SysExp Cours1Document15 pagesSysExp Cours1Mira AllaliPas encore d'évaluation
- Pf3 Circuits Anal Et NumDocument4 pagesPf3 Circuits Anal Et Numdupont lavoisier100% (5)
- Entreprises Et Réseaux SociauxDocument14 pagesEntreprises Et Réseaux Sociauxle blog crossmedias.fr100% (2)
- Réseaux Dentreprise LEONIDocument18 pagesRéseaux Dentreprise LEONImarhforPas encore d'évaluation