Académique Documents
Professionnel Documents
Culture Documents
Devoircorrigdecontrlen1 Gniemcaniquetourparallle Bactechnique2014 2015mrbenabdallahmarouan 150523231055 Lva1 App6892
Transféré par
younes0 évaluation0% ont trouvé ce document utile (0 vote)
85 vues14 pagesDevoir corrigee
Titre original
Devoircorrigdecontrlen1 Gniemcaniquetourparallle Bactechnique2014 2015mrbenabdallahmarouan 150523231055 Lva1 App6892 Copy
Copyright
© © All Rights Reserved
Formats disponibles
PDF ou lisez en ligne sur Scribd
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDevoir corrigee
Droits d'auteur :
© All Rights Reserved
Formats disponibles
Téléchargez comme PDF ou lisez en ligne sur Scribd
0 évaluation0% ont trouvé ce document utile (0 vote)
85 vues14 pagesDevoircorrigdecontrlen1 Gniemcaniquetourparallle Bactechnique2014 2015mrbenabdallahmarouan 150523231055 Lva1 App6892
Transféré par
younesDevoir corrigee
Droits d'auteur :
© All Rights Reserved
Formats disponibles
Téléchargez comme PDF ou lisez en ligne sur Scribd
Vous êtes sur la page 1sur 14
pevew(eegel
Proposé par I'enseignant
M’ BEN ABDALLAH MAROUAN
Classe : 4* Sciences Techniques 3
Pour la date de : jeudi 06 - Novembre - 2014
SYSTEME D’ETUDE
TOUR PARALLELE
(POSTE DE PERCAGE)
Année Scolaire : 2014-2015
Qww.devoirat.net 08
Dossier Technique
anc (eonmanipaateuy
I. PRESENTATION GENERALE DU SYSTEME.
Le systeme ci-contre met en évidence le dispositif d’avance ence
d'un tour paralléle (poste de pergage) pour communiquer a Lv
Poutil un mouvement de translation altematif en fonction de
la rotation continue d’une came disque.
Les pieces usinées sont classées en deux catégories suivant
metres. On dispose alors de deux capteurs de
proximité CA et CB qui servent a donner des impulsions
@horloge aux compteurs a chaque passage d’une piéce usinée.
+I
leurs
ut Fo co
cA { Compteur A 8 o AFFL
BB 2g
38 Re
az Bs
8 88
cB ‘Compteur B gx AFF2
‘SCHEMA SYNOPTIOUE
Le circuit intégré 74H1C257 engendre un systéme combinatoire qui consiste 4 envoyer vers les
sorties (IY, 2Y, 3Y et 4Y) soit le mot binaire (1A, 2A, 3A et 4A), ou bien le deuxigme mot
binaire (1B, 2B, 3B et 4B) selon |'état de entrée de sélection A/B (Broche 1). Le fonctionnement est
écrit par la table de vérité suivante
US,
< WEE ==
z : oe | ae | ay | zy | sy | ay
: oy}
3 ovEs 1 x 0 0 0 0
3 oe 0 0 1A 2A 3A 4a
4
Fe 0 1 18 | 23 | 38 | 4B
Gromer
X : indifférent 0 ou 1
AT pi ci p]afbfecfafte | t] ¢ | Nombre affiche
x[xix[x[ififatifitita 8
Xi xix[xtotol oot ooo] brane
ofotofevififififififa 0
ofotovifolrfifolofelo 1
ofotifefififofifi feta 2
ofotatisitifififoleta 3
ofr fotofotitifofotita 4
oie fifoftififonits 3
oti trfofofotitifi tata 6
ofitififrfrfirfofofeta 1
ifojefotitatafafatifa 8
ifotetitatafafofotifa 9
Devoir de Contrdle N°l (2014-2015) Page 1/3 ‘TOUR PARALLELE (POSTE DE PERCAGE)
Laboratoire de Technologie de KORBA 2ors. Proposé Par M'Ben Abdallah Marouan
‘hito:/‘mimifs.jimdo.com,
Qwww.devoirat.net
Dossier Technique
TIT- La FONCTION CovMUT TION PAR TRANSISTOR:
Si B= Ole transistor est bloqué
Si B= 1le transistor est saturé
c c ¢ ¢
Ic=0 Icz0
B = Bor =
E E é é
TV-CiRcurr DE COMPTAG HERA OSS CTRDIV?
CER) 5g cr-0
CTRDIVS
rerxp agg oT
Document constructeur : Fiche technique du CI 7469
reir an | eTRDIVIS
xO) oro
20K @)
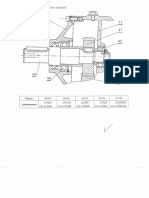
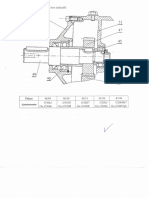
V- NOMENCLATURE : - 7469
3 [ 1 Pignon
T_| 1 | Suportnciear [1 [toss 33 [1 | Covete parle
10 _1_[ Vis 211 _| Hlesque 32 [1] Annean dlasique
9] 1 Fierou 201 | Rovlemeat 311 feowverle
«| 4 [iste 1 [2 _[Comercle 30_[ 1 | ointaleve
7] 1 [Poul motise 18] 1 | Poulie ecepiise » Foureay
| TAnneas lasiqne 17 | 2 Roulement BC 28 [1 [Biche
5 1_{Cisvene paalele 16 [1 | Chavet paalale 27 | 2 | Roulement BT
411 Titre moteur S| 1 J Arbre intrmediire 26 [1 | Rondlle fen
[1 [isthe 1 25_[ 1 Eorou a coches
2 [1 Bigue 13_|_1_[ Cops 24 [6_[ Vis CHe
11 Moura 1} 1 [oumie 2 [1 [Courome
Rp_| Nb Désignation Rp | Nb Désignation Rp | Nb Désignation
Clavette paraliée ordinaire Rondeles plates
VI- Les
Composants
NORMALISES
Longueurs des taraudages
Trouborgne noma
Devoir de Contrdle N°l (2014-2013)
Laboratoire de Technologie de KORBA
Qhw.deve
Page 2/3
‘TOUR PARALLELE (POSTE DE PERCAGE)
Proposé Par M'Ben Abdallah Marouan
irat.net 777
y
4 02 au" PEAIONSP MED
Be
GaIGO) AVIA Ad ALSOd
FOOUIDAL, ap Oey
Vue suivant F
deo at 13
3 Devo DE Conrrde N°I
SYSTEME D’ETUDE
"TOUR PARALLELE "
(POSTE DE PERCAGE)
N.B: Aucune documentation n'est autorisée
Nom & Prénom : - N°... Classe : 48m ScT3
Note : 120
Année Scolaire 2014-2015
Qow.devoirat.net “”
Nom & Prénom Ne Classe : 4 ScT 3
ETUDE DE POSTE DE PERCA’
|- Analvse Fonctionnell s x6 IS points]
v En se référant au dossier technique, compléter le diagramme F.A.S.T partiel ci-dessous relatif a la
fonction FP: « Assurer le percage des montants d'étagéres » en indiquant le repere et la
désignation des composants assurant les fonctions techniques. (Avant modification)
FTL | Fixer les montants @ percer Non étudiée
Assurer le pergage FT2 | Animer Moutil d'un mouvement A SUIVRE
des montants de rotation.
Animer 'outil é'un mouvement Non étudiée
FT3 | ce translation ——=—=aar
Fr2i_| Fixer le moteur. LJ
Transmettre la rotation de
FT2 Fr2z | l'arbre moteur 4 outil en 3, |___ A SUIVRE
vitesses.
Assurer le guidage en
F123 | rotation de la broche (28)
Encastrer la poulle (7) sur
77221 | Harbre moteur (4)
Encastrer le poulie (18) sur
77222 | varbre intermédiaire (15)
Guider en rotation l'arbre
77223 | intermédiaire (15)
Fr224 | Régler Ia tension de pose de
Ia courroie (12)
Transmettre le mouvement
mm po] ™ gees)
ignon (34) a "arbre
aire (15)
Lier le
Ly reas | ies inde
Devoir de Contréle N°I (14-15) Page 1/4 ‘TOUR PARALLELE (Poste de Percage)
Laboratoire Mécanique de KORBA 2005 Proposé par M'BEN ABDALLAH MAROUAN
w.devoirat.net
Nom & Prénom Ne Classe : 4 S
2- SCHEMA CINEMATIQUE : [55 points]
En se référant au dessin d’ensemble de poste de pergage : (voir dossier technique)
¥ Completer dans Mordre : le tableau des classes déquivalence cinématique par les repéres des pices suivantes
$23 -Beud032-25- 16.21.28. LL .6. le graphe des liaisons et le schéma cinématique
EC Composants
E
A [1,2,3,8,9, 10, 13,19, 35, Bull7,
B | 29,30, 31, Bad7
C [26 Bud,
D
E
F
22, 24, Bin20,
14, 15, 18, 33,34, Binl 7,
47,
Préciser l’emplacement des C.E.C ainsi
que les fonctions techniques
FT 21 FT 23, FT 221
FI 223 et FT
Y Justifier la présence des pieces suivantes
- La rondelle (26)
- Lavis Hz (35)
Devoir de Contrdle N° (14-15) Page 24 "TOUR PARALLELE (Poste de Percage)
Laboratoire Mécanique de KOREA uo jin com, Propsé pa MPBEN Aust AH MAgoUAN
4 20s
Qww.devoi rat.net
Nom & Prénom Ne Classe : 4 ScT 3
3- COTATION FONCTIONNELLE © [5 points]
a- Tracer sur le dessin ci-dessous la chaine de cotes relative 4 la condition JA.
b- Justfier la présence de JA?
c- Installer sur le dessin ci-dessous la condition JB permettant d'éviter les contacts surabondants entre (13) et (21).
d- A partir de la chaine de cotes tracée et les données suivantes
6 +41 +01 4
0,78 JAS 1,55 5 aye=arn= 10° 5 aged ,ay=21 "sp ay=34 ' ay=1™
~ Quelle sera la longueur de 'arbre intermédiaire " ays"
ay
e+ Compléter sur le dessin ci-dessous les ajustements sur les portées des roulements (17a, 17b) et la poulie
réceptrice (18)
Vecteur condition "JB" >|
SSS
=— Ss:
=
Devoir de Contrdle N°I (14-1 Page ‘TOUR PARALLELE (Poste de Percage)
Laboratoire Mécanique de KORBA 20 es Post par MBE AnpatAer Manoa
‘no-mimijimdo.com,
w.devoirat.net
Nom & Prénom Ne Classe : 4 ScT 3
4-
14,5 points]
Le constructeur se propose de modifier la solution constructive
relative a la liaison encastrement de la poulie motrice (7) par rapport a
larbre (4) figurant sur le dossier technique en utilisant les données
suivantes
Pitces 74.
Mise | Surfaces de contact
en | -cylindrique
position | - plane (Epaulement et clavette + rainure)
Maintien
en | Rondelle d’appui et vis H
position
D Utiliser, suivant le besoin, les composants normalisés sur le dossier technique.
\
Echelle 1:1 Labo Mécanique (Lycée KORBA) Devoir de Controle N°1 (2014-2015)
to POSTE DE PERCAGE 4 Sciences Techniques 3
Devoir de Contréle NPI (14-1 Page 4/4 ‘TOUR PARALLELE (Poste de Percage)
Laboratoire Mécanique de KORBA ‘igo fimo com Proposé par MB ABDALLA MAROUan
: 2015
w.devoirat.net
3 Devo DE Conrrde N°I
SYSTEME D’ETUDE
"TOUR PARALLELE "
(POSTE DE PERCAGE)
N.B: Aucune documentation n'est autorisée
e
G ° ... Classe : 48me ScT3
Nom & Prénom :
Année Scolaire 2014-2015
Qow.devoirat.net “”
CORRECTION
- Analyse Fonctionnell s reage © [5 points]
¥ En se référant au dossier tectnique, compléter le diagramme F.A.S.T partiel ci-dessous relatif a la
fonction FP: « Assurer le pergage des montants d'étagéres » en indiquant le repere et la
désignation des composants assurant les fonctions techniques. (Avant modification)
FTA | Fixer les montants 4 percer. Non étudiée
Assurer le percage Animer outil d'un mouvement A SUIVRE
[sero
FT3_ | Asimeroutl¢'un mouvement Non étudiée
F12i_| Fixer le moteur. 1 4 Vis CHe (8)
ier Voutild' Transmettre la rotation de
Animer Tout d’un mouvement rag | Pansmettre [2 rotation de A SUIVRE
de rotation, vitesses. —
Assurer le guidage en L|
FT3 | rotation de la brache (28) Deux Roulements (27)
erzay | Encastrer la poulie (7) sur |_| Clavette () - Circlips (6) -
arbre moteur (4) Epaulement sur (4)
prazg | Encastrer le poulie (18) sur |_| Clavette (16) - Epaulement
Marbre intermédiaire (15) sur (13)
Guider en rotation l'arbre
F128 | Oe salaive (iS) Deux Roulements (17)
Régler la tension de pose de |_| Frou (9) - Vis H (10) -
la courroie (12). Trou Oblong
Fr224
‘ransmettre la rotation
FT22] de l'arbre moteur a F125 | ge'(7) 4 (18) Courroie (12)
loutil en 3 vitesses.
Transmettre le mouvement
Frage | Ler Ne piano (3a) & arbre 11 Clavette (33) - Cirelips 32)
Devoir de Contréle N°I (14-15) Page 1/4 ‘TOUR PARALLELE (Poste de Percage)
Laboratoire Mécanique de KORBA 2005 Proposé par M'BEN ABDALLAH MAROUAN
w.devoirat.net
CORRECTION
2- SCHEMA CINEMATIQUE
En se référant au dessin d’ensemble de poste de pergage : (voir dossier technique)
points}
¥ Compléter dans Fordre: le tableau des classes déquivalence cinématique par les reperes des pigces suivantes
c ibaa ‘
CEC Composants
1,2, 3.8.9. 10, 13, 19. 35, Besl7.20, 21, 11...
22,24, Bin20, 23
Préciser emplacement des C.E.C ainsi
« que les fonctions techniques
4 FT 21: FT 23: FT 221:
FT222 FT 203 et FT 205,
NS
¥ Justfier la présence des pices suivantes
~ La rondelle (26) : Pour le freinage de I'écrou 4 encoche (25) / Broche (28) ;
- Lavis H
Pour I'arrét en rotation (Lier en rotation) de fourreau 28 / au corps (13)
Devoir de Contréle N°I (14-15) Page 2
Laboratoire Mécanique de KORBA
Tou
‘http mimfs jimdo.com,
Qow.devoirat.net “”
PARALLELE (Poste de Percage)
Proposé par M'BEN ABDALLAH MAROUAN
CORRECTION
IN FONCTIONNELLE : [5 points}
a- Tracer sur le dessin ci-dessous la chaine de cotes relative la condition JA.
b- Justfier a présence de JA?: Condition pour le montage de l'anneau élastique (32), :
c Installer sur le dessin ci-dessous la condition JB permettant d'éviter les contacts surabondants entre (13) et (21).
d- A partir de la chaine de cotes tracée et les données suivantes
a +n
0
y= 21" 5 ayy=34" jay= 1
‘
0,755 JAS 185 jan am=10°™ 5 ay=4*
= Quelle sera la longueur de arbre intermédiaire " ays"
> Jn“Ape(Art2. ArrtAtAntAy) © Ar
“Jat(Art2. ArrtAgstA got Aga)=1+(442x10+34+1+21)=81 mm
Jan + (Ardni*2. Arnot AtsaitAszn Asim)
© = Jay=Aravr(Arsnt2. Arto tArsartA son tA sim) > Ad:
=> Angu=1,55 + 3,95 + 2x9,85 + 344 0,94 + 21= 81,14 mm.
D> Tew Arsn-(Atget2. ArryrtAsartAsoart Asan) © Atsn= Jam + (Auasct2, ArrvrtAuartAsrtA sop)
+O
= Ansn= 0,75 + 4,05 + 2.x 10+ 341 +1 +2111 = 81 mm ays-81°
e+ Compléter sur le dessin ci-dessous les ajustements sur les portées des roulements (17a, 17b) et la poulie
réceptrice (18)
JB
Vecteur condition "JB"
18 17a 14 21 17b 3413 23 24 32
Devoir de Contrdle N°I (14-1 Page ‘TOUR PARALLELE (Poste de Percage)
Laboratoire Mécanique de KORBA ‘igo fimo com Proposé par MBs ABDALLA MARovan
: 2015
w.devoirat.net
CORRECTION
: [4,5 points]
Le constructeur se propose de modifier la solution constructive
relative a la liaison encastrement de la poulie motrice (7) par rapport a
Varbre (4) figurant sur le dossier technique en utilisant les données
suivantes
Pidces 74
Mise | Surfaces de contact :
en -ylindrique
position _| - plane (Epaulement et clavette + rainure)
Maintien
en | Rondelle d°appui et vis H
position
> Utiliser, suivant le besoin, les composants normalisés sur le dossier technique.
Echelle 1:1 Labo Mécanique (Lycée KORBA) Devoir de Controle N°1 (2014-2015)
<1@ POSTE DE PERCAGE 4 Soiences Techniques 3
Devoir de Contréle N°I (14-1 Page 4/4 ‘TOUR PARALLELE (Poste de Percage)
Laboratoire Mécanique de KORBA ‘igo fimo com Proposé par MBs ABDALLA MARovan
: 2015
w.devoirat.net
Vous aimerez peut-être aussi
- Ait AllalDocument14 pagesAit AllalyounesPas encore d'évaluation
- Poly Robotique 2007 PDFDocument99 pagesPoly Robotique 2007 PDFWafa BenzaouiPas encore d'évaluation
- Etau de PercageDocument5 pagesEtau de PercageyounesPas encore d'évaluation
- Devoircorrigdecontrlen1 Gniemcaniquetourparallle Bactechnique2014 2015mrbenabdallahmarouan 150523231055 Lva1 App6892Document14 pagesDevoircorrigdecontrlen1 Gniemcaniquetourparallle Bactechnique2014 2015mrbenabdallahmarouan 150523231055 Lva1 App6892younesPas encore d'évaluation
- Ex CPH FraisageDocument1 pageEx CPH FraisageyounesPas encore d'évaluation
- Badi eDocument30 pagesBadi eyounes100% (1)
- Altivar 08Document2 pagesAltivar 08younesPas encore d'évaluation
- Ex CPH FraisageDocument1 pageEx CPH FraisageyounesPas encore d'évaluation
- Catalogue KDIDocument130 pagesCatalogue KDIzenogredina80% (5)
- Etau de PercageDocument5 pagesEtau de PercageyounesPas encore d'évaluation
- DrginstrDocument69 pagesDrginstryounesPas encore d'évaluation
- Exercices MIP MAPDocument3 pagesExercices MIP MAPyounesPas encore d'évaluation
- Isoetatisme PDFDocument10 pagesIsoetatisme PDFfarhat ghanem100% (1)
- Max 3etapeDocument2 pagesMax 3etapeyounesPas encore d'évaluation
- De La Cotatijon A La FabricationDocument26 pagesDe La Cotatijon A La FabricationyounesPas encore d'évaluation
- Fabrication Avancee Et Methodes Industrielles Tome 1 PDFDocument32 pagesFabrication Avancee Et Methodes Industrielles Tome 1 PDFyounesPas encore d'évaluation
- Contrat de PhaseDocument4 pagesContrat de PhaseyounesPas encore d'évaluation
- Cours ConceptionDocument59 pagesCours Conceptionsbenlatifa100% (4)
- Numérisation0023 PDFDocument1 pageNumérisation0023 PDFyounesPas encore d'évaluation
- FT 12Document2 pagesFT 12younesPas encore d'évaluation
- Numérisation 0022Document1 pageNumérisation 0022younesPas encore d'évaluation
- Assemblage Sous CatiaDocument7 pagesAssemblage Sous CatiazakiwakiPas encore d'évaluation
- Numérisation 0023Document1 pageNumérisation 0023younesPas encore d'évaluation
- Numérisation 0020Document1 pageNumérisation 0020younesPas encore d'évaluation
- S200Document30 pagesS200younesPas encore d'évaluation
- Numérisation0021 PDFDocument1 pageNumérisation0021 PDFyounesPas encore d'évaluation
- Numérisation 0021Document1 pageNumérisation 0021younesPas encore d'évaluation