Vous aimerez peut-être aussi
- Cours 2 SocketsDocument77 pagesCours 2 SocketsMOHAMED SOLTANIPas encore d'évaluation
- Tic Et SantéDocument9 pagesTic Et SantéMOHAMED SOLTANIPas encore d'évaluation
- Vérification Et ValidationDocument4 pagesVérification Et ValidationMOHAMED SOLTANIPas encore d'évaluation
- Les Systemes ExpertsDocument8 pagesLes Systemes ExpertsMOHAMED SOLTANIPas encore d'évaluation
- Rapport de Stage DarelleDocument31 pagesRapport de Stage Darellejordan goumtsa78% (9)
- Leadership Et Éthique: Définition Les Big Fives : Les 5 Traits Importants de La PersonnalitéDocument2 pagesLeadership Et Éthique: Définition Les Big Fives : Les 5 Traits Importants de La PersonnalitéNOURDINE EZZALMADIPas encore d'évaluation
- Fairefacealasouffrance Preface IntroDocument9 pagesFairefacealasouffrance Preface Introfrgenas12508Pas encore d'évaluation
- Oumou BAH MotivationDocument3 pagesOumou BAH MotivationKaba MohamedPas encore d'évaluation
- Chapitre 4 Le Diplome, Un Passeport Pour L'emploi - Copie PDFDocument34 pagesChapitre 4 Le Diplome, Un Passeport Pour L'emploi - Copie PDFjayseseckPas encore d'évaluation
- p139 st1Document12 pagesp139 st1Asmaa KassiPas encore d'évaluation
- Declic Maths PDFDocument2 pagesDeclic Maths PDFBéatrice David0% (1)
- 1 - OK Introduction Aux Routeur Module 1 2 Et 3 V2 Fabrice ManconDocument13 pages1 - OK Introduction Aux Routeur Module 1 2 Et 3 V2 Fabrice ManconImane SamiPas encore d'évaluation
- 1bex 04 Barycentre Sr2Fr AmmariDocument1 page1bex 04 Barycentre Sr2Fr AmmariYoussef MouyanePas encore d'évaluation
- Chapitre 15 - Nature Et CultureDocument5 pagesChapitre 15 - Nature Et CultureLoukman Mahiza CompaoréPas encore d'évaluation
- Projet Pedagogique JARDIN D ENFANTSDocument9 pagesProjet Pedagogique JARDIN D ENFANTSedyPas encore d'évaluation
- Medecine Humaine PDFDocument2 pagesMedecine Humaine PDFDiah BarbéPas encore d'évaluation
- Correction Cas Clinique 1 HtaDocument3 pagesCorrection Cas Clinique 1 HtaJihene OuesletyPas encore d'évaluation
- AIDIAG (Instr Service) CD VFDocument29 pagesAIDIAG (Instr Service) CD VFalainPas encore d'évaluation
- 74 264 PB PDFDocument143 pages74 264 PB PDFАнна ШаповаловаPas encore d'évaluation
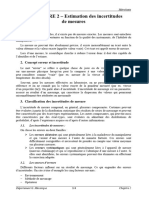
- CHAPITRE 2 Incertitudes de Mesure ProfDocument4 pagesCHAPITRE 2 Incertitudes de Mesure ProfKha LedPas encore d'évaluation
- Découpage A1 K23 HOANG Dieu Tu Ver 31.7Document17 pagesDécoupage A1 K23 HOANG Dieu Tu Ver 31.7Đào Thị Kim PhượngPas encore d'évaluation
- Classe 4ème Module 3 Et 4Document3 pagesClasse 4ème Module 3 Et 4Nadia Bn ALi100% (1)
- Formulaire InscriptionDocument1 pageFormulaire InscriptionEmmanuel MbembaPas encore d'évaluation
- 2 - Fonctionnement de La Personnalite Blida FinalDocument34 pages2 - Fonctionnement de La Personnalite Blida FinalAlven SmithPas encore d'évaluation
- Invitation Doctorants Workshop Day-1Document4 pagesInvitation Doctorants Workshop Day-1Hamza Hamza HamzaPas encore d'évaluation
- Chauvin Entretien 1975Document9 pagesChauvin Entretien 1975sofidavilaPas encore d'évaluation
- Rapport de Stage en Milieu ScolaireDocument24 pagesRapport de Stage en Milieu Scolairefatondjiguenole03Pas encore d'évaluation
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Neuropsychologie: Les bases théoriques et pratiques du domaine d'étude (psychologie pour tous)D'EverandNeuropsychologie: Les bases théoriques et pratiques du domaine d'étude (psychologie pour tous)Pas encore d'évaluation
- Nutrition Sportive Fondamentaux et guide pratique du succèsD'EverandNutrition Sportive Fondamentaux et guide pratique du succèsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Les 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonD'EverandLes 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonPas encore d'évaluation
- Diagnostics différentiels des psychoses endogènes, des troubles de la personnalité et des névrosesD'EverandDiagnostics différentiels des psychoses endogènes, des troubles de la personnalité et des névrosesÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Le TDAH chez l’adulte : Comment reconnaître & faire face au TDAH chez l’adulte en 30 étapes faciles.D'EverandLe TDAH chez l’adulte : Comment reconnaître & faire face au TDAH chez l’adulte en 30 étapes faciles.Pas encore d'évaluation
- Cahier de jeux de stimulation cognitive: Sujets Alzheimer, désorientés, démences, amnésiesD'EverandCahier de jeux de stimulation cognitive: Sujets Alzheimer, désorientés, démences, amnésiesPas encore d'évaluation
- Guide De Démarrage De L'Apiculture: Le Guide Complet Pour Élever Des AbeillesD'EverandGuide De Démarrage De L'Apiculture: Le Guide Complet Pour Élever Des AbeillesPas encore d'évaluation