Vous aimerez peut-être aussi
- Correction Maths GLDocument2 pagesCorrection Maths GLmamadouibrahimanPas encore d'évaluation
- TD1 Ex1-2Document2 pagesTD1 Ex1-2Mansour KazanPas encore d'évaluation
- TER Just Canale-8Document1 pageTER Just Canale-8hajar hajarePas encore d'évaluation
- Taller Conjuntos y Tablas de Verdad Luisa y AngelicaDocument3 pagesTaller Conjuntos y Tablas de Verdad Luisa y AngelicaTecnoservic J YLPas encore d'évaluation
- TER Just Canale-13Document1 pageTER Just Canale-13hajar hajarePas encore d'évaluation
- TALLER DE LOGICA-ingeniera 2021Document7 pagesTALLER DE LOGICA-ingeniera 2021SAMUEL ELIAS ARRIETA MARTINEZPas encore d'évaluation
- 1 - Hoja de RespuestasDocument1 page1 - Hoja de RespuestasIvonne MTPas encore d'évaluation
- Logique Exercice3Document2 pagesLogique Exercice3Anthony MattaPas encore d'évaluation
- Implication Et Équivalence Exercices Logique Et RaisonnementsDocument6 pagesImplication Et Équivalence Exercices Logique Et RaisonnementsAlicia AboutitePas encore d'évaluation
- Richard Clayderman Ballade Pour Adelineic3zz86 PDFDocument4 pagesRichard Clayderman Ballade Pour Adelineic3zz86 PDFFranklinPas encore d'évaluation
- Logique Et Raisonnement (Enregistré Automatiquement)Document11 pagesLogique Et Raisonnement (Enregistré Automatiquement)Mohamed KonatePas encore d'évaluation
- Correction de Lexercice 10 TD1Document2 pagesCorrection de Lexercice 10 TD1djidel2023Pas encore d'évaluation
- Ejercicio 1 - Validez e Invalidez SemánticasDocument4 pagesEjercicio 1 - Validez e Invalidez SemánticasIsaac NewtonPas encore d'évaluation
- Elegie Violoncello - Re Min - Full ScoreDocument2 pagesElegie Violoncello - Re Min - Full Scorebezzez montassarPas encore d'évaluation
- TD 1201617 SDocument7 pagesTD 1201617 SChadiChahidPas encore d'évaluation
- Correction Du Controle Continu de Logique Et Structure Discretes 2022.2023Document1 pageCorrection Du Controle Continu de Logique Et Structure Discretes 2022.2023Louis LissouckPas encore d'évaluation
- Cours Electromagnetisme DjelouahDocument71 pagesCours Electromagnetisme Djelouahstabilo1990Pas encore d'évaluation
- TD5 - LOGIQ COrrDocument4 pagesTD5 - LOGIQ COrrAmeni BoughanmiPas encore d'évaluation
- Admanehocine Devoir Maison td1Document4 pagesAdmanehocine Devoir Maison td1adfaefhPas encore d'évaluation
- Joe Satriani - Day at The Beach PDFDocument7 pagesJoe Satriani - Day at The Beach PDFGustavo Adolfo LermaPas encore d'évaluation
- Consonne - V - 01 - CDocument1 pageConsonne - V - 01 - CMayna ZaidiPas encore d'évaluation
- MMPI II Hoja de RespuestasDocument1 pageMMPI II Hoja de RespuestasLuis CervantesPas encore d'évaluation
- PDF Powell Samba Do AviaoDocument7 pagesPDF Powell Samba Do AviaoNeil MuirPas encore d'évaluation
- Desc 4Document6 pagesDesc 4Soto MiltonPas encore d'évaluation
- Desc 4Document9 pagesDesc 4Soto MiltonPas encore d'évaluation
- TD2 IA CorrectionDocument6 pagesTD2 IA CorrectionSamir AouniPas encore d'évaluation
- TER Just Canale-7Document1 pageTER Just Canale-7hajar hajarePas encore d'évaluation
- Modes DiatoniquesDocument4 pagesModes DiatoniquesBenoit David BroussePas encore d'évaluation
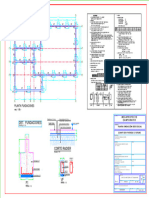
- Planta Fundacion Sede SocialDocument1 pagePlanta Fundacion Sede SocialJuanPas encore d'évaluation
- The Ramones - Psycho TherapyDocument5 pagesThe Ramones - Psycho Therapywsimionato7541Pas encore d'évaluation
- TD LogiqueDocument4 pagesTD Logiquewissal bouadjilaPas encore d'évaluation
- Fe en Fuego-ViolínDocument1 pageFe en Fuego-ViolínMauro Alexander Vásquez OrrilloPas encore d'évaluation
- 6a APQ 16 PF Cuadernillo y Hoja RespDocument19 pages6a APQ 16 PF Cuadernillo y Hoja RespAndres Felipe Palacio AliPas encore d'évaluation
- R LDocument2 pagesR LMarcelo JuarezPas encore d'évaluation
- Chapitre 5Document5 pagesChapitre 5CryZiiiX (CryZiiiX)Pas encore d'évaluation
- Hoja de RespuestasDocument2 pagesHoja de RespuestasLEYDI FERNANDA YAMUNAQUE CASTILLOPas encore d'évaluation
- Blues Brothers - Who's Making Love (Standard Notation Only)Document4 pagesBlues Brothers - Who's Making Love (Standard Notation Only)54321anibalgarciaPas encore d'évaluation
- IMSLP518102 PMLP839634 Le - Mariage - de - Salomon Cherubini PartiturDocument43 pagesIMSLP518102 PMLP839634 Le - Mariage - de - Salomon Cherubini PartiturPierre-Emmanuel HurpeauPas encore d'évaluation
- Casi Cintia Millon LLLDocument1 pageCasi Cintia Millon LLLCintia QuispePas encore d'évaluation
- 00 Livin' On A Prayer - PartituraDocument9 pages00 Livin' On A Prayer - Partituraantonio ernestoPas encore d'évaluation
- 6 动态规划Document105 pages6 动态规划Johanna YePas encore d'évaluation
- Jeff Beck - Sleep WalkDocument7 pagesJeff Beck - Sleep WalkFrancesco MagistroPas encore d'évaluation
- Jeff Beck - Sleep WalkDocument7 pagesJeff Beck - Sleep WalkLeoPas encore d'évaluation
- 1-2-Cours N°2 Logique Prop Semantique Consistance Et Completude Ver2023Document69 pages1-2-Cours N°2 Logique Prop Semantique Consistance Et Completude Ver2023nawelxbellilPas encore d'évaluation
- Carlos Santana - The Game of Love Featuring MichDocument17 pagesCarlos Santana - The Game of Love Featuring Michzaraki9Pas encore d'évaluation
- Detalles EstructuraDocument1 pageDetalles Estructuradaniel leonardo tramontana cubasPas encore d'évaluation
- Comptine D'un Autre Été Apres Midi - Partitura CompletaDocument4 pagesComptine D'un Autre Été Apres Midi - Partitura CompletaAlejandro NietoPas encore d'évaluation
- Calendário SERVIÇOS E FOGAS DE 2023 1 Cia PChoque PDFDocument1 pageCalendário SERVIÇOS E FOGAS DE 2023 1 Cia PChoque PDFFabiano RodriguesPas encore d'évaluation
- Dictionnaire D'accordDocument1 pageDictionnaire D'accordPauloPas encore d'évaluation
- Alge BreDocument3 pagesAlge BreRACHID ALAOUI SELSOLIPas encore d'évaluation
- Wuerfel PPTDocument1 pageWuerfel PPTborisPas encore d'évaluation
- Desc 4Document10 pagesDesc 4Soto MiltonPas encore d'évaluation
- 2019 ACCES CorrigéDocument1 page2019 ACCES CorrigéabaabtourPas encore d'évaluation
- Rock Metal en La Avec TiresDocument1 pageRock Metal en La Avec Tiresangel beteluPas encore d'évaluation
- Posiciones 2012Document1 pagePosiciones 2012mario.calderon.syPas encore d'évaluation
- WIND SONG - 03 - Violin IIDocument2 pagesWIND SONG - 03 - Violin IIEthan WindlePas encore d'évaluation
- Correction Devoirs Surveille 240218 200605Document18 pagesCorrection Devoirs Surveille 240218 200605Kora LivePas encore d'évaluation
- Systèmes Distribués Et Virtualisation de Ressources: Tanguy R (Transparents: Antoine Fraboulet)Document98 pagesSystèmes Distribués Et Virtualisation de Ressources: Tanguy R (Transparents: Antoine Fraboulet)beyaPas encore d'évaluation
- Livres de Chants EnfantinsDocument119 pagesLivres de Chants EnfantinsMahamadou CoulibalyPas encore d'évaluation
- SolutionExamenFinal (2003)Document7 pagesSolutionExamenFinal (2003)beyaPas encore d'évaluation
- Architectures de ComposantsDocument23 pagesArchitectures de ComposantsbeyaPas encore d'évaluation
- Imm5788 1-Od0bsb9Document1 pageImm5788 1-Od0bsb9beyaPas encore d'évaluation
- SEEE Exercice Pagination v2017.2.1 AnswersDocument2 pagesSEEE Exercice Pagination v2017.2.1 AnswersbeyaPas encore d'évaluation
- TP2 - Module Méthodes D'analyse : Exercice 1: GDF Et MCDDocument2 pagesTP2 - Module Méthodes D'analyse : Exercice 1: GDF Et MCDHamza AlaouiPas encore d'évaluation
- Conception Et Realisation D Un Prototype PDFDocument126 pagesConception Et Realisation D Un Prototype PDFChouichi Ghada100% (1)
- CV ProfDocument1 pageCV Profforever273Pas encore d'évaluation
- 4 - Gestion Des DisquesDocument34 pages4 - Gestion Des DisquesMohamed AnnaniPas encore d'évaluation
- GuideTechnique LCPC SUIVIDIMDocument64 pagesGuideTechnique LCPC SUIVIDIMIroukoura AlexPas encore d'évaluation
- SNT Devoir Maison Calcul ItineraireDocument5 pagesSNT Devoir Maison Calcul Itineraireninostampa1Pas encore d'évaluation
- SIGMA SD900 - French - Manuel de L'utilisateur PDFDocument90 pagesSIGMA SD900 - French - Manuel de L'utilisateur PDFfakhourimia souPas encore d'évaluation
- Architécture Dun SmartphoneDocument15 pagesArchitécture Dun SmartphoneKirk Ben Hammet100% (1)
- Compte RenduDocument6 pagesCompte Renduassia guzelPas encore d'évaluation
- OuiiiDocument1 pageOuiiiOussama MonirPas encore d'évaluation
- La Process ComDocument27 pagesLa Process ComTREVOR100% (2)
- DEC - Note Du Jury Du 23 Juin 2016Document16 pagesDEC - Note Du Jury Du 23 Juin 2016Anthony CiliaPas encore d'évaluation
- Dba SRDocument5 pagesDba SRGhofrane FerchichiPas encore d'évaluation
- Ô Nuit (Jean-Philippe Rameau)Document3 pagesÔ Nuit (Jean-Philippe Rameau)Isaac TercerosPas encore d'évaluation
- Ait Boulahcen Hamza RademDocument1 pageAit Boulahcen Hamza RademAIT BOULAHCENPas encore d'évaluation
- Article Technologie Et EnseignementDocument2 pagesArticle Technologie Et EnseignementJulia ClaptonPas encore d'évaluation
- Mestiri Mining Fall2015Document48 pagesMestiri Mining Fall2015Bassma KhilaPas encore d'évaluation
- 10-Notice Concours - G2E - Notice-Dinscription-2022Document16 pages10-Notice Concours - G2E - Notice-Dinscription-2022BAÏ NGUIRA-APas encore d'évaluation
- Langage SQL LCDDocument121 pagesLangage SQL LCDOmar Berraho100% (1)
- Les Outils de La RechercheDocument96 pagesLes Outils de La RechercheSahanePas encore d'évaluation
- FR Acs800-01 HW K A4 ScreenDocument176 pagesFR Acs800-01 HW K A4 ScreenBounaji LotfallahPas encore d'évaluation
- TD1 Complexité CorrectionDocument3 pagesTD1 Complexité CorrectionMohamed Aziz MarzoukiPas encore d'évaluation
- Amn 20220915161851.pdfamnDocument2 pagesAmn 20220915161851.pdfamnflorian delebecquePas encore d'évaluation
- Export DeclarationDocument3 pagesExport DeclarationKhadija AbbasPas encore d'évaluation
- Toyota Corolla VersoDocument38 pagesToyota Corolla Versokains5467% (3)
- Regulation l634cDocument56 pagesRegulation l634cCheval AlainPas encore d'évaluation
- Att 1436900235833 Att 1436897005248 Information Rotary Club InternationalDocument7 pagesAtt 1436900235833 Att 1436897005248 Information Rotary Club InternationalAkimBiPas encore d'évaluation
- Les Fonctions de L'entreprise Rappel. Les Systemes D'information Et Les PGIDocument10 pagesLes Fonctions de L'entreprise Rappel. Les Systemes D'information Et Les PGIKidrissi Karim,idrissiPas encore d'évaluation
- ACTIONS Sage X3Document2 pagesACTIONS Sage X3simon971130Pas encore d'évaluation
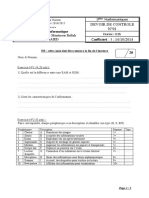
- Devoir de Contrôle N°1 Exemple 16 2014 2015Document3 pagesDevoir de Contrôle N°1 Exemple 16 2014 2015Anouer MachfarPas encore d'évaluation