Vous aimerez peut-être aussi
- SSP 448 Contrôle de Géométrie Connaissances de BaseDocument48 pagesSSP 448 Contrôle de Géométrie Connaissances de BaseManuel Carballo Muñoz100% (1)
- CM1 L9 Ranger Des Fractions Simples 2020Document3 pagesCM1 L9 Ranger Des Fractions Simples 2020koss koss100% (1)
- Systèmes De Communication Véhiculaire: Les perspectives d'avenir du transport intelligentD'EverandSystèmes De Communication Véhiculaire: Les perspectives d'avenir du transport intelligentPas encore d'évaluation
- Lexique PhiloDocument698 pagesLexique PhiloJulien LaizéPas encore d'évaluation
- Atelier Web 2Document34 pagesAtelier Web 2Saf BesPas encore d'évaluation
- Exercice3 CapteurDocument8 pagesExercice3 CapteurTunENSTABPas encore d'évaluation
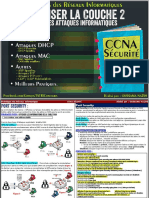
- Sécuriser La Couche 2 Contre Les Attaques Informatiques - OUSSAMA NAZIH PDFDocument9 pagesSécuriser La Couche 2 Contre Les Attaques Informatiques - OUSSAMA NAZIH PDFGhani Moundir100% (1)
- Qos: Comment La Qualité de Service Améliore Votre Vitesse de Connexion Internet ?Document15 pagesQos: Comment La Qualité de Service Améliore Votre Vitesse de Connexion Internet ?ines100% (1)
- Rapport VANET2Document31 pagesRapport VANET2Sadia BoulhianPas encore d'évaluation
- Lab SecurityDocument37 pagesLab SecurityMàrwàne LyazidiPas encore d'évaluation
- Métrologie Dans L'entrepriseDocument58 pagesMétrologie Dans L'entrepriseAchat LyesPas encore d'évaluation
- Cour Cine 2020-2021 Final-1Document79 pagesCour Cine 2020-2021 Final-1Salah InePas encore d'évaluation
- Máquinas de InducciónDocument52 pagesMáquinas de InducciónCésar AguilarPas encore d'évaluation
- TP SVMDocument2 pagesTP SVMChafik BerdjouhPas encore d'évaluation
- Securisation WifiDocument6 pagesSecurisation WifibombflexPas encore d'évaluation
- Sujets NetlogoDocument2 pagesSujets NetlogomanianisPas encore d'évaluation
- VPN Installation Et Configuration D Un VPN Route Avec OpenVPNDocument16 pagesVPN Installation Et Configuration D Un VPN Route Avec OpenVPNomafannPas encore d'évaluation
- Diagramme de ClasseDocument14 pagesDiagramme de ClassemohakyoPas encore d'évaluation
- TD Horloge1Document5 pagesTD Horloge1khouloud fathallah100% (1)
- TP1 Scilab Installation Et Prise en MainDocument9 pagesTP1 Scilab Installation Et Prise en MainRegragui WalidPas encore d'évaluation
- Virtualbox PDFDocument13 pagesVirtualbox PDFشكيب بن عليPas encore d'évaluation
- Bentahar Atef Boukhalfa Hanane Cheval de TroieDocument6 pagesBentahar Atef Boukhalfa Hanane Cheval de Troieatef bentaharPas encore d'évaluation
- Installation D'un Serveur DHCP Sous Gnu-LinuxDocument9 pagesInstallation D'un Serveur DHCP Sous Gnu-Linuxmstapha oulhajPas encore d'évaluation
- Système Embarqué Temps Réel 2020/2021: Université Mohamed El Bachir El IbrahimiDocument25 pagesSystème Embarqué Temps Réel 2020/2021: Université Mohamed El Bachir El IbrahimiAlouani KacemPas encore d'évaluation
- Support Initiation À La Programmation MATLAB Partie 01-PDocument18 pagesSupport Initiation À La Programmation MATLAB Partie 01-PSarra BÉCHIRIPas encore d'évaluation
- TP N°5cryptographie SymétriqueDocument2 pagesTP N°5cryptographie SymétriqueManal Ess100% (1)
- Cour 6 IoT 6LowPanDocument18 pagesCour 6 IoT 6LowPanFatti RaddiPas encore d'évaluation
- IPSECDocument19 pagesIPSECOumaima BagraouiPas encore d'évaluation
- Cours EigrpDocument21 pagesCours Eigrpsana BenBechaPas encore d'évaluation
- Cours: Logique Formelle Chapitre 3: Logique Des Prédicats Partie 1/3Document14 pagesCours: Logique Formelle Chapitre 3: Logique Des Prédicats Partie 1/3Ahmed ChebilPas encore d'évaluation
- AlgorithmeDocument37 pagesAlgorithmeAhmed BidArPas encore d'évaluation
- L'IP Spoofing Attaque Et SolDocument4 pagesL'IP Spoofing Attaque Et SolelfainiPas encore d'évaluation
- A) Récupérer Contiki-3.0: TP - Iot Programmation ContikiDocument10 pagesA) Récupérer Contiki-3.0: TP - Iot Programmation Contikimadani belacelPas encore d'évaluation
- Cacti From Packages VFRDocument43 pagesCacti From Packages VFRMoïse GuilavoguiPas encore d'évaluation
- IPSECDocument6 pagesIPSECRayen GhazouaniPas encore d'évaluation
- Concepts de Sécurité Wi-FiDocument94 pagesConcepts de Sécurité Wi-FiFrançois-Emmanuel GoffinetPas encore d'évaluation
- 288055563-05 GIU SAGEM LINK F - FRDocument0 page288055563-05 GIU SAGEM LINK F - FRMoise MoisePas encore d'évaluation
- IPv6 13 14Document52 pagesIPv6 13 14amirdgPas encore d'évaluation
- Systèmes de Détection D'Intrusion (Ids) : Par: Keita SiraDocument42 pagesSystèmes de Détection D'Intrusion (Ids) : Par: Keita SiraAmidou BagayogoPas encore d'évaluation
- Partie 1 CodageDocument8 pagesPartie 1 CodageSihem MansouriPas encore d'évaluation
- Comment Utiliser Wireshark PDFDocument2 pagesComment Utiliser Wireshark PDFJoshPas encore d'évaluation
- TDDocument2 pagesTDAnoh0% (2)
- CoursJava ExceptionDocument19 pagesCoursJava ExceptionOUMPas encore d'évaluation
- Projet ChatDocument2 pagesProjet ChatMarwen GuesmiPas encore d'évaluation
- ClassesDocument7 pagesClassesYOUPIPas encore d'évaluation
- Mini Projets UnixDocument5 pagesMini Projets UnixNoureddineRmilaPas encore d'évaluation
- M10136 Formation L Essentiel de L Administration de Serveurs Microsoft Windows Server 2008 PDFDocument3 pagesM10136 Formation L Essentiel de L Administration de Serveurs Microsoft Windows Server 2008 PDFCertyouFormationPas encore d'évaluation
- Chapitre: I Généralités Sur Les Robots Mobiles: 2.1 Definition D'Un Robot MobileDocument44 pagesChapitre: I Généralités Sur Les Robots Mobiles: 2.1 Definition D'Un Robot MobileKhalil Hsaine100% (1)
- TP3 2018-Inst-EseDocument4 pagesTP3 2018-Inst-EseDounia OuzagPas encore d'évaluation
- CoursDocument114 pagesCoursKoné Mikpan HervéPas encore d'évaluation
- Projet Résumé CCNA Security Chapter 1Document8 pagesProjet Résumé CCNA Security Chapter 1Kingrone1Pas encore d'évaluation
- TP4 Oracle VM VirtualBoxDocument13 pagesTP4 Oracle VM VirtualBoxDel HadPas encore d'évaluation
- TP0 PDFDocument6 pagesTP0 PDFhadjerPas encore d'évaluation
- Correction TD1 Réseaux Hauts DébitsDocument7 pagesCorrection TD1 Réseaux Hauts DébitsHAMINA jeubaghaPas encore d'évaluation
- 2009-07 Matlab SimulinkDocument16 pages2009-07 Matlab SimulinkMartin FloresPas encore d'évaluation
- TP RéseauDocument1 pageTP RéseauMask'àGazPas encore d'évaluation
- SSH + SFTPDocument13 pagesSSH + SFTPAlin TrancaPas encore d'évaluation
- Chapitre 5 - Configuration D'un Routeur CISCODocument9 pagesChapitre 5 - Configuration D'un Routeur CISCODrissa Michael CoulibalyPas encore d'évaluation
- Ciscomadesimple - be-GLBP Gateway Load-Balancing ProtocolDocument5 pagesCiscomadesimple - be-GLBP Gateway Load-Balancing ProtocolVerdier Amp KouaméPas encore d'évaluation
- Rapport Mir Securite LinuxDocument29 pagesRapport Mir Securite LinuxJérémy PapinPas encore d'évaluation
- Service Web (SOAP)Document28 pagesService Web (SOAP)ARSENEPas encore d'évaluation
- CN 1900023Document73 pagesCN 1900023aissaniPas encore d'évaluation
- td1 CorrigéDocument3 pagestd1 CorrigéNahrawess SlamaPas encore d'évaluation
- Modèle OSI SynthèseDocument6 pagesModèle OSI SynthèseWissam TizaPas encore d'évaluation
- 2a Reseau Informatique (2018-19) PDFDocument53 pages2a Reseau Informatique (2018-19) PDFJunior Souleymane Sore100% (2)
- 03 Poster ReductionDocument1 page03 Poster ReductionBalalaŇaŖîfPas encore d'évaluation
- TD3Document2 pagesTD3Dia Mouhamadou NabyPas encore d'évaluation
- Cycle3 Lien Entre Programme Et CompetencesDocument6 pagesCycle3 Lien Entre Programme Et CompetencesHiro gislenePas encore d'évaluation
- Serie TG 2022 Isil ADocument7 pagesSerie TG 2022 Isil AIndigo LandPas encore d'évaluation
- Suites Et Séries de Fonctions: Exercices CorrigésDocument43 pagesSuites Et Séries de Fonctions: Exercices Corrigésyouness hida100% (1)
- Modélisation Des Mécanismes Et Liaisons ÉquivalentesDocument24 pagesModélisation Des Mécanismes Et Liaisons Équivalentesmahmoud bensassiPas encore d'évaluation
- Poly Cop Electric It 2Document69 pagesPoly Cop Electric It 2aaaretPas encore d'évaluation
- Resume Cour MathDocument10 pagesResume Cour MathSaiyef CaesarPas encore d'évaluation
- Endomorphismes AntisymétriqueDocument1 pageEndomorphismes AntisymétriqueIl NBPas encore d'évaluation
- FrenchDocument26 pagesFrenchHamza OuterzaPas encore d'évaluation
- Etude Au Vent GradinDocument17 pagesEtude Au Vent GradinTitous SalimPas encore d'évaluation
- Syllabus de GB L2 LMD SOIRDocument73 pagesSyllabus de GB L2 LMD SOIRJulien ManokoPas encore d'évaluation
- CoursROPonts PDFDocument210 pagesCoursROPonts PDFJaime M QuesinberryPas encore d'évaluation
- Rappels MathDocument50 pagesRappels MathOdile StilePas encore d'évaluation
- Le Champ Magnetique Exercices Non Corriges 2Document1 pageLe Champ Magnetique Exercices Non Corriges 2marouanePas encore d'évaluation
- Activite Vecteur Vitesse D-Un Point CorrectionDocument5 pagesActivite Vecteur Vitesse D-Un Point CorrectionRadouan DjemayiPas encore d'évaluation
- Notions de Logique Exercices Non Corriges 1Document1 pageNotions de Logique Exercices Non Corriges 1chaymaezitouni7Pas encore d'évaluation
- 5 Équilibre D'un Solide Soumis À Deux Forces Prof - Bourassi (WWW - Pc1.ma)Document2 pages5 Équilibre D'un Solide Soumis À Deux Forces Prof - Bourassi (WWW - Pc1.ma)Prince AbdooPas encore d'évaluation
- EDT Niveau 1 13-11-2023Document5 pagesEDT Niveau 1 13-11-2023orlandvianneyPas encore d'évaluation
- Mémoire Master 2 ForageDocument65 pagesMémoire Master 2 ForagemtffechkeurPas encore d'évaluation
- 2012 2013 MP23 L1PC PDFDocument192 pages2012 2013 MP23 L1PC PDFColmain NassiriPas encore d'évaluation