Académique Documents
Professionnel Documents
Culture Documents
Sodapdf-Converted (1) Systemes Séquentielle
Sodapdf-Converted (1) Systemes Séquentielle
Transféré par
Mïna MaTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Sodapdf-Converted (1) Systemes Séquentielle
Sodapdf-Converted (1) Systemes Séquentielle
Transféré par
Mïna MaDroits d'auteur :
Formats disponibles
MINISTèRE DE L’ENSEIGNEMENT SUPÉ RIEUR
ET DE LA RECHERCHE
SCIENTIFIQUE
Institut Supérieur des Etudes
Technologiques de Nabeul
Département de Génie Electrique
Support de cours :
Systèmes Logiques (2)
Logique séquentielle
Pour les Classes de 1er année
GE
(Tronc Commun)
Elaboré par :
Ben Amara Mahmoud................................................................(Technologue)
& Gâaloul Kamel........................................................................(Technologue)
Année universitaire: 2015/2016
ISET de Nabeul Cours de Système logique (2)
TABLE DES MATIERES
Page
Chapitre1 : Logique séquentielle...........................................................................................................2
1- Objectifs.....................................................................................................................................2
2- Introduction................................................................................................................................2
3- Les Bascules asynchrones..........................................................................................................3
4- Les Bascules synchrones............................................................................................................8
Chapitre 2 : Les registres.....................................................................................................................14
1- Objectifs...................................................................................................................................14
2- Généralités................................................................................................................................14
3- Registre de mémorisation.........................................................................................................14
4- Registre à décalage...................................................................................................................15
5- Registre mixte..........................................................................................................................17
Chapitre 3 : Les Compteurs.................................................................................................................19
1- Objectifs...................................................................................................................................19
2- Introduction..............................................................................................................................19
3- Compteurs et décompteurs asynchrones..................................................................................19
4- Compteurs et décompteurs synchrones....................................................................................25
Chapitre 4 : Synthèse des compteurs..................................................................................................27
1- Objectifs...................................................................................................................................27
2- Introduction..............................................................................................................................27
3- Exemples..................................................................................................................................30
Bibliographie et Webographie.............................................................................................................39
BEN AMARA M. & GAALOUL K. Page 2 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Chapitre 1
LOGIQUE SEQUENTIELLE
1. OBJECTIFS
Traiter en détails les systèmes séquentiels.
Comprendre les bascules.
2. INTRODUCTION
2.1 Rappel sur les circuits combinatoires
Dans un système combinatoire, les sorties ne dépendent que de l’état des
entrées à un instant donné.
E1
E2 S0
Entrées E3 S1
Circuit
. S2 Sorties
combinatoire .
En . .
Sk
2.2 Les circuits séquentiels
La fonction de sortie des systèmes séquentiels dépend en plus des états des
entrées (appelées entrées primaires) des états antérieurs des sorties (appelées
entrées secondaires). On dit que le circuit séquentiel possède une fonction
mémoire.
Entrées S
E Sorties
primaires 1
Circuit
0
E .. . primaires
2 combinatoire
S
Entrées
secondaires Sorties
secondaires
Mémoire
BEN AMARA M. & GAALOUL K. Page 3 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Les systèmes séquentiels sont classes en 2 catégories :
Circuits séquentiels asynchrones
Dans les circuits séquentiels asynchrones, les sorties changent d’états dès qu’Il
y a changements des états des entrées.
Circuits séquentiels synchrones
Dans ce type de circuits les sorties changent d’états après avoir eu une
autorisation d’un signal de synchronisation appelé souvent signal « Horloge »
noté H ou CLK.
3. LES BASCULES ASYNCHRONES
La bascule est le circuit de mémorisation le plus répandu. Elle a aussi pour rôle
d’élaborer un diviseur de fréquence par deux. Elle est un système séquentiel
constitue par une ou deux entrées et deux sorties complémentaires.
E1 Q
Bascule
E2 Q
La bascule est le circuit de mémorisation le plus répandu. Elle a aussi pour rôle
d’élaborer un diviseur de fréquence par deux. Elle est un système séquentiel
constitué par une ou deux entrées et deux sorties complémentaires.
On l’appelle ainsi « bascule bistable » car elle possède deux états stables.
On distingue 4 types de bascules : RS, D, JK, et T.
3.1 Bascule RS
Symbole Explication
R Q
S Q Une impulsion sur S (set) Mise à 1 de Q
RS
(marche)
BEN AMARA M. & GAALOUL K. Page 4 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Table de vérité Equation des sorties
Entrées SortiesMode de fonctionnement Qn+1
RSQn Etat précèdent Etat
Qn+1 Qn+1 précèdent Enclenchement Maintien à 1
RS
000 0 Maintien
1 a 0 Déclenchement Interdit
Interdit Qn
001 1 0 00 01 11 10
0
010 1 0 0 1 0
1
011 1 0 1 1 0
100 0 1
101 0 1
110 - -
111 - - Qn+1=RQn+
Logigramme
A l’aide des portes NAND A l’aide des portes NOR
S
R Q
Q
R Q
S
NB : L’état R=S=1 est un état interdit puisqu’il nous donne le deux sorties
complémentaires Q et Q au même état ce qui n’est pas logique.
BEN AMARA M. & GAALOUL K. Page 5 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
3.2 Bascule D
Symbole Explication
D Q
D Un appui sur D Mise à 1 de Q
Q Un relâchement de D Mise à 0 de
Table de vérité Equation des sorties
Entrées Mode de fonctionnement Maintien à 0 : 0
Sorties
Qn+1
DQn Qn+1 Qn+1 Déclenchement :
Enclenchement : D
00 0 1
Qn
01 0 1 Maintien à 1 : 1 0 1
0
10 1 0 0 1
1
11 1 0 1 1
Qn+1=
Logigramme
A l’aide des portes NAND
A l’aide des portes NOR
D Q Q
Q
D
Remarque : En mettant S=D et R=D dans l’équation de la bascule RS Qon
aura Qn+1=DQn+D=D(1+Qn)=D.
BEN AMARA M. & GAALOUL K. Page 6 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Ainsi on obtient une bascule D en rajoutant un inverseur entre S et R.
D Q
RS
3.3 Bascule JK
Contrairement à la bascule RS, la condition J=K=1, ne donne pas lieu à une
condition indéterminée, mais par contre la bascule passe à l’état opposé.
Table de vérité Equation des sorties
Entrées Sorties Mode de fonctionnement
dent Etat précèdentJKQ
Maintien
nQn+1Q 0 : 0 Déclenchement : Enclenchement : Maintien à 0 : 1 Enclenchement
à n+1 Qn+1 : Déclenchemen
00001
00110 JK
01001 Qn
0 00 01 11 10
01101
1 0 0 1 1
10010
10110 1 0 0 1
11010
11101
Qn+1=JQn+KQ
J Q S Q
J
JK RS
K R
K Q Q
BEN AMARA M. & GAALOUL K. Page 7 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
3.4 Bascule T
La bascule T est obtenue en reliant les entrées J et K d’une bascule JK.
Table de vérité Equation des sorties
Entrées Mode de fonctionnement Maintien à 0 : 0
Sorties Qn+1
T Qn Qn+1 Qn+1 Maintien à 1 : 1 T
0 0 0 1 Enclenchement : Qn
0 1 1 0 Déclenchement : 0 0 1
1 0 1 0 1 0 1
1 1 0 1 1 0
Qn+1=TQn+TQn=TQ
Remarque : En remplaçant J et K par T dans l’équation de la bascule JK on
aura Qn+1=TQn+TQn=TQn.
T Q
Q
T
T JK
Q Q
3.5 Forçage des bascules
Certaines bascules sont équipées des entrées particulières
: Entrée de remise à 1 : PRESET (RA1),
Entrée de remise à 0 : RESET (RA0),
RA0
RA0
S
Q S Q
RS
R Q
R
Q
RA1 RA1
On applique le même résonnement pour les bascules D, T et JK.
BEN AMARA M. & GAALOUL K. Page 8 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
3.5.1 Table de vérité
Entrées Sorties Mode de fonctionnement
PRESETCLEAR Qn+1 Qn+1
00 Qn 0 Qn 1
01 1 0 Mémorisati
10 on Forçage
4. LES 11
BASCULES SYNCHRONES à1
Forçage à
Une bascule est synchrone quand ses sorties ne changent d’état que si un
signal supplémentaire est appliquée sur une entrée, dite entrée d’horloge
(notée H ou CLK).
H
t
4.1 Synchronisation sur niveau haut
RA0
RA0
S Q
Q S
H RSH
H
R Q
Q
R
RA1
RA1
Si H=0 : les sorties S et R sont bloquées à 1 quelques soient R et S, (les
entrées sont masquées par rapport aux sorties) la sortie garde l’état
précèdent.
Si H=1 : la bascule RS fonctionne normalement les sorties obéissent aux
entrées.
Donc la bascule RS ne fonctionne normalement que si H=1 (Niveau
Haut). Même chose pour les autres bascules.
BEN AMARA M. & GAALOUL K. Page 9 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
4.2 Synchronisation sur niveau haut
Dans le niveau bas, c’est l’inverse qui se manifeste :
Si H=1 : Q garde l’état précèdent.
Si H=0 : Fonctionnement normal de la bascule.
RA0
R
S Q
Q S
H RSH
H
R Q
Q
R
RA1
RA1
Si H=1 : les sorties S et R sont bloquées à 1 quelques soient R et S, (les
entrées sont masquées par rapport aux sorties) la sortie garde l’état
précèdent.
Si H=0 : la bascule fonctionne normalement les sorties obéissent aux
entrées.
Donc la bascule RS ne fonctionne normalement que si H=0 (Niveau
bas). La bascule synchrone est identique à celle asynchrone.
Même chose pour les autres bascules.
Remarque :
Ce type de synchronisation (sur niveau) a beaucoup d’inconvénients : la
bascule est sensible aux entrées pendant toute la durée de l’état de l’horloge
pour niveau haut (ou 0 pour le niveau bas). Si, pendant que H =1 (ou H=0), des
parasites apparaissent sur les entrées S et R, ils peuvent entrainer des
changements d’état imprévus sur la sortie Q.
Afin de minimiser au maximum la durée de cet état sensible, on s’arrange pour
que la bascule reste dans son état mémoire sauf pendant un bref instant, juste
au moment où l’entrée passe de 0 à 1 (ou de 1 à 0).
La bascule est dite synchronisée sur front.
BEN AMARA M. & GAALOUL K. Page 10 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
4.3 Synchronisation sur front
Une variable logique S peut avoir deux niveaux : le niveau haut (Vrai) ou le
niveau logique bas (Faux). Quand elle passe du niveau bas vers le niveau haut,
elle définit le front montant. Dans le cas contraire, elle définit le front
descendant.
1 1
S S
0 0
t t
Front montant Front descendant
Symbole :
Front montant Front descendant
H Q 1 H Q
1
H Q H Q
0 t 0 t
4.4 Principe de fonctionnement d’une bascule JK synchronisée sur front montant
Table de fonctionnement Symbole
Entrées Sorties Mode de fonctionnement
H J K Qn+1 Qn+1
0 x x xx0x xQn
0 Qn Qn Qn
Etat précèdent Etat précèdent Etat précèdent Etat précèdent Déclenchement : Enclenchement :
1 0 1 JHK Q
changement d’état
1 0 JK
1 1 Qn Qn Q
Qn 0 Qn 1
1 0
Qn Qn
BEN AMARA M. & GAALOUL K. Page 11 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Chronogramme :
H
1
0
t
J
1
0
t
K
1
0
t
Q
1
0
t
4.5 Bascule JK maitre esclave
4.5.1 Synchronisation sur Front montant
Preset
Qm Je Qe
Jm
H
Km JKm Qm Ke JKe Qe
Clear
Les deux bascules fonctionnent normalement si PRESET=CLEAR=1 et si H=1
la première bascule fonctionne normalement alors que la deuxième est bloquée
et quand H=0 la première bascule est bloquée alors que la deuxième fonctionne
normalement et le deux bascules ne fonctionnent ensemble qu’au moment de
passage de H de 1 à 0 c’est-à-dire au moment du front descendant ().
BEN AMARA M. & GAALOUL K. Page 12 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Donc toute bascule maitre esclave dont la maitre travaille sur le niveau haut et
l’esclave travaille sur le niveau bas est une bascule synchronisée sur front
descendant. P
J Q
H JK
K Q
C
4.5.2 Synchronisation sur Front montant
Preset
Qm Je Qe
Jm
H
Km JKm Qm Ke JKe Qe
Clear
Les deux bascules fonctionnent normalement si PRESET=CLEAR=1 et si H=0
la première bascule fonctionne normalement alors que la deuxième est bloquée
et quand H=1 la première bascule est bloquée alors que la deuxième
fonctionne normalement et le deux bascules ne fonctionnent ensemble qu’au
moment de passage de H de 0 à 1 c’est-à-dire au moment du front montant ().
Donc toute bascule maitre esclave dont la maitre travaille sur le niveau bas et
l’esclave travaille sur le niveau haut est une bascule synchronisée sur front
montant.
P
J Q
H JK
K Q
BEN AMARA M. & GAALOUL K. Page 13 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
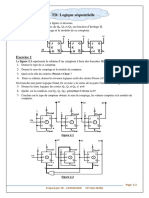
4.5.3 Exercice
Soit le montage suivant :
P
D Q
D
H
Q
C
Compléter le chronogramme de D et Q. en déduire la fonction ainsi réalisée.
H
1
0
t
D
1
0 t
Q
1 t
4.6 Résumé
0
Synchronisation sur niveau
Synchronisation
haut sur niveau
Synchronisation
Bas sur front montant
Synchronisation sur front descendan
P P P P
J Q J Q JHK Q JHK Q
HK JK HK JK JK JK
Q Q Q Q
C C C C
BEN AMARA M. & GAALOUL K. Page 14 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Chapitre 2
LES REGISTRES
1. OBJECTIFS
Etudier les différents types de registre
Connaitre le principe de fonctionnement de chaque type.
2. GENERALITES
Un registre est un ensemble de cellules mémoire de base.
Les données peuvent être écrites/lues en même temps (parallèle) ou une
après l’autre (série).
Le nombre de bits du registre correspond au nombre de cellules mémoire
(nombre de bascule D ou JK) du registre.
On note que toutes les entrées d’horloge (H) des cellules sont reliées (ligne
d’écriture).
Les registres sont classées par :
Le nombre de bits.
Le mode de fonctionnement (unique ou multiple).
La classification des modes de fonctionnement est la suivante :
Des registres à entrées parallèles et sorties parallèles : PIPO (Parallel IN-
Parallel OUT).
Des registres à entrées parallèles et sorties séries : PISO (Parallel IN-Serial
OUT).
Des registres à entrées séries et sorties parallèles : SIPO (Serial IN- Parallel
OUT).
Des registres à entrées séries et sorties séries : SISO (Serial IN- Serial
OUT).
3. REGISTRE DE MEMORISATION (Registre parallèle)
Un registre de mémorisation (ou registre de données) est un registre dans
lequel les différents étages sont indépendants les uns des autres, cependant
certains signaux agissent sur l’ensemble des étages ; tel que remise à 0 et
remise à 1.
BEN AMARA M. & GAALOUL K. Page 15 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
3.1 Registre de mémorisation 4 bits
D D D D
P
D D D D
Q Q Q Q
Q Q Q Q
H C
Q0 Q1 Q2 Q3
Dans l’exemple ci-dessous, les 4 bascules sont chargées en parallèle et lues en
parallèle en synchrone avec le signal d’écriture H. Ce type de registre est
appelé aussi registre PIPO.
3.2 Schéma fonctionnel d’un registre PIPO.
E0 E1 E2 En-1
…
H
PIPO
Clear
…
S0 S1 S2 Sn
4. REGISTRE A DECALAGE (Registre série)
Ce type de registre est principalement utilisé comme mémoire d’information
dynamique ; la fonction de décalage consiste de faire glisser l’information de
chaque cellule élémentaire dans une autre cellule élémentaire adjacente.
Ce type de registre est appelé aussi registre SISO.
BEN AMARA M. & GAALOUL K. Page 16 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
4.1 Schéma fonctionnel
E
H SISO
Clear
S
4.2 Décalage a droite
La bascule du rang i doit recopier la sortie de la bascule du rang (i-1) ainsi son
D0Q0 D1Q1 D2Q2 D3Q3
entrée doit être connectée à la sortie (i-1).
D D D D
E Q
Q Q Q Q
H C
4.3 Décalage à gauche S
L’entrée de la bascule du rang i doit recopier la sortie de la bascule du rang
(i+1).
E
S
D0Q0 D1Q1 D2Q2 D3Q3
D D D D
Q0Q1Q2Q3
4.4 Décalage réversible
Il existe des registres à décalage réversibles, c’est à dire des registres ou le
décalage s’effectue vers la droite et vers la gauche en fonction du niveau
logique applique à l’entrée S : « sens de décalage ».
BEN AMARA M. & GAALOUL K. Page 17 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Q0 I0
Mux D0Q0 Mux D1Q1 Mux D2Q2 Mux D3Q3
D D D DQ3
Q Q Q Q
C
H
S
En fonction de la valeur de l’entrée S, on a l’opération suivante :
S Opération
0
1 Décalage à gauche
Décalage à droite
5. REGISTRE MIXTE
On peut trouver des registres mixtes, donc on peut écrire en parallèle et
lire en série (PISO), ou vice versa (PISO), ou qui offrent les deux
possibilités « au choix ».
5.1 Registre PISO E0 E1 E2 En-1
…
H
PISO
Clear
S
5.1.1 Logigramme en utilisant des bascules D
BEN AMARA M. & GAALOUL K. Page 18 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
I0 I1 I2 I3
Q3
D0Q0D1Q1D2Q2 D3Q3
DDD D
Q0 Q1 Q2 Q3
C
H S
BEN AMARA M. & GAALOUL K. Page 19 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
5.2 Registre SIPO
E
H SIPO
Clear
…
S0 S1 S2 Sn-1
Logigramme en utilisant des bascules D
E=D0
D0Q0 D1Q1 D2Q2 D3Q3
D D D D
Q0 Q1 Q2 Q3
C
H
Q Q Q Q3
5.3 Exemple d’application
Deux types de registres (PISO et SIPO) sont utilisés dans les liaisons séries ;
ils forment la base des modems. Par exemple, si on veut transmettre une
information entre deux ordinateurs distants de quelques dizaines de mètres.
Transmettre l’information en parallèle nécessite beaucoup de fils et très
couteux. La solution est alors d’utiliser un registre PISO pour envoyer les bits
sur une seule ligne. Au bout de laquelle, un registre SIPO reçoit ces bits et
reconstitue des octets qui sont transmis à l’ordinateur de destination.
BEN AMARA M. & GAALOUL K. Page 20 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Chapitre 3
LES COMPTEURS
1. OBJECTIFS
Etudier les différents types de compteurs.
Comprendre le principe de fonctionnement de chaque type.
Maitriser les étapes de synthèse d’un compteur.
2. INTRODUCTION
Dans des nombreuses applications on est amené à faire de comptage :
comptage d’impulsions dans un temps donné pour la mesure de fréquence par
exemple. Dans un cas il est nécessaire de compter dans d’autre il faut
décompter à partir de zéro ou d’un autre nombre donné. Un compteur, au sens
large de terme, sera susceptible de fonctionner en compteur proprement dit
(up counter) ou encore en décompteur (down counter) et dans lequel on
pourra introduire un nombre de départ quelconque c’est-à-dire que l’on peut
initialiser ou charger (load).
On peut classer les compteurs selon leur principe comme suit :
Compteurs-décompteurs asynchrones.
Compteurs-décompteurs synchrones.
L’élément de base des compteurs est une bascule à entrée d’horloge (bascule
synchrone), soit de type D, T ou JK.
3. COMPTEURS ET DECOMPTEURS ASYNCHRONES :
Le terme asynchrone signifie que les évènements ne possèdent aucune relation
temporelle entre eux. Les bascules formant un compteur asynchrone ne changent
pas d’état en même temps, car elles ne sont pas reliées au même signal d’horloge,
le déclanchement périodique uniquement sur la première bascule du compteur. Le
déclanchement des bascules suivantes se fait de proche en proche de sorte que la
sortie Qn ou Qn sera appliquée à l’horloge Hn+1 selon que l’on travaille sur front
montant ou front descendant et selon que l’on veut obtenir un compteur ou
décompteur.
Ce type de compteur étant généralement d’une réalisation simple et présente
l’inconvénient de générer des aléas de fonctionnement (retard de propagation).
BEN AMARA M. & GAALOUL K. Page 21 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
3.1 Les compteurs asynchrones
20 21 22 23
1 J0Q0 1 J1 Q1 1 J2Q2 1 J3Q3
H0 H1 H2 H3
1 K0 Q0 1 K1 Q1 1 K2 Q2 1 K3 Q3
Q0
1
0 t
Q1
1
0 t
Q2
1
0 t
Q3
1
0 t
0000000100100011010001010110011110001001101010111100
0123456789101112
On obtient donc un Compteur asynchrone modulo 16.
On peut réaliser le même compteur en utilisant des bascules synchronisées
sur front montant dont l’horloge Hi sera reliée à la sortie Qi-1.
BEN AMARA M. & GAALOUL K. Page 22 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
3.2 Les décompteurs asynchrones
20 21 22 23
1 J0Q0 1 J1 Q1 1 J2Q2 1 J3Q3
H0 H1 H2 H3
1 K0 Q0 1 K1 Q1 1 K2 Q2 1 K3 Q3
Q0
1
0
t
Q1
1
0 t
Q2
1
0 t
Q3
1
0 t
0000111111101101110010111010100110000111011001010100
0151413121110987654
On obtient donc un Décompteur asynchrone modulo 16.
On peut réaliser le même compteur en utilisant des bascules synchronisées
sur front montant dont l’horloge Hi sera reliée à la sortie Qi-1.
BEN AMARA M. & GAALOUL K. Page 23 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
3.3 Séquence tronquée :
Le modulo est le nombre d’état distincts occupés par un compteur avant son
recyclage à l’état initial. Le nombre maximal d’états possibles, ou modulo
maximal, d’un compteur est égal à 2n, ou n représente le nombre des bascules
dans le compteur.
On peut construire des compteurs pour obtenir une séquence dont le nombre
d’états est inférieur au 2n. La séquence est alors appelée une séquence
tronquée.
Pour obtenir une séquence tronquée, il faut forcer le recyclage du compteur
avant que ce dernier n’ait occupe tous les états. On doit disposer des bascules
munies des entrées de prédisposition remise à 0 RA0 (connu aussi RESET).
Exemple d’un compteur modulo 10 (compteur à décade)
2 2 2 2
1 1 1 1
J0 Q0 J1 Q1 J2Q2 H2 J3Q3
1 1 1 1
H0 K0 H1 H3
Q0 K1 Q1 K2 Q2 K3 Q3
C C C C
3.4 Utilisation d’autres bascules :
On peut utiliser d’autres types de bascules pour réaliser les compteurs/décompteurs
asynchrones :
3.4.1 Bascule T : 1 T Q
H Q
BEN AMARA M. & GAALOUL K. Page 24 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Ce type des bascules changent d’états à chaque Qn+1
impulsion d’horloge, si l’entrée T=1 donc on peut T
construire des compteurs/décompteurs asynchrones Qn
0 0 1
à base des bascules T en utilisant le montage ci- 1 0 1
dessous. 1 0
2 2 2 23
T0 Q0 T1Q1 T2Q2 T3Q3
1 1 1 1
H0Q0 H1Q1 H2Q2 H3Q3
C C C C
3.4.2 Bascule D :
1 DQ
H Q
Ce type des bascules changent d’états à chaque Qn+1
impulsion d’horloge. L’enclenchement est réalisé si D
D=1 et le déclenchement est réalisé si l’entrée D=0 Qn
0 0 1
donc si on relie D à Q, on obtient un changement 1 0 1
d’état à chaque impulsion d’horloge. On peut 0 1
construire des compteurs/décompteurs asynchrones
à base des bascules D en utilisant le montage ci-
dessous :
BEN AMARA M. & GAALOUL K. Page 25 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
2 2 2 23
D0 Q0 D1 Q1 D2 Q2 D3 Q3
1 1 1 1
H0Q0 H1Q1 H2Q2 H3Q3
C C C C
3.5 Compteur intégré 7493 :
Le circuit intégré 74LS93 est un exemple de compteur asynchrone. Il est
constitué d’une bascule et d’un compteur asynchrone 3 bits. Il comporte des
entrées de remise à zéro branchées à une porte NAND, désignées R0(1) et
R0(2). Quand ces deux entrées sont au niveau HAUT, le compteur est initialisé à
0000.
3.5.1 Diagramme logique :
(12) Q0 (9) Q1 (8) Q2 (11) Q3
Clock A (1)
J0 Q0 J1 Q1 J2 Q2 J3 Q3
Clock B
(14) H0 H1 H2 H3
K0 Q0 K1 Q1 K2 Q2 K3 Q3
R0(1)
(2) RAZ RAZ RAZ RAZ
(3)
R0(2)
3.5.2 Exemples d’utilisation du compteur 74LS93 :
Clock A Clock B Clock A Clock B
) )
74LS93 74LS93
R0(1) R0(1)
Compteur modulo 16 Compteur à décade
R0(2 R0(2
Q0 Q1 Q2 Q3 Q0 Q1 Q2 Q3
BEN AMARA M. & GAALOUL K. Page 26 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
3.6 Retard de propagation :
Les compteurs asynchrones sont souvent appelés compteurs à propagation
parce que l’effet de l’impulsion d’horloge n’est d’abord ressenti que par la
première bascule. Cet effet ne peut atteindre la bascule suivante immédiatement
à cause du retard de propagation de la première bascule. Cet effet est cumulatif
de telle sorte qu’une impulsion du signal d’horloge se propage à travers le
compteur durant un certain temps avant d’atteindre la dernière bascule, à cause
de retard de propagation.
Le retard de propagation associé aux compteurs asynchrones s est un des
désavantages majeur pour ce type des compteurs car il limite la fréquence
d’utilisation. Le retard de propagation pour une bascule est de l’ordre de 5 ns
c’est pour cela qu’il faut utiliser des fréquences inferieures à 200 MHz.
4. COMPTEURS ET DECOMPTEURS SYNCHRONES :
Le terme synchrone fait référence à des évènements qui possèdent une relation
temporelle fixe l’un par rapport à l’autre. En termes de fonctionnement d’un
compteur, le mot synchrone désigne que toutes les bascules du compteur sont
synchronisées sur le même signal d’horloge. Le problème de retard de
propagation est ainsi résolu.
Les bascules sont associées entre elles, de telle manière pour la bascule du
rang i on applique toutes les sorties des bascules qui la précède aux entrées J
et K.
4.1 Les compteurs synchrones
2 2 2 23
J0Q0 J1Q1 J2Q2 J3Q3
1
H0 H1 H2 K2 Q2 H3
1 K0 Q0 K1 Q1 K3 Q3
BEN AMARA M. & GAALOUL K. Page 27 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Q0
1
0 t
Q1
1
0 t
Q2
1
0 t
Q3
1
0 t
0000000100100011010001010110011110001001101010111100
0123456789101112
On obtient donc un Compteur synchrone modulo 16.
On peut réaliser le même compteur en utilisant des bascules synchronisées
sur front montant et les sorties Qi à la place de Qi.
4.2 Les décompteurs synchrones
20 21 22 23
1 J0Q0 J1Q1 J2Q2 J3Q3
H0 H1 H2 K2 Q2 H3
1 K0 Q0 K1 Q1 K3 Q3
BEN AMARA M. & GAALOUL K. Page 28 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Q0
1
0
t
Q1
1
0 t
Q2
1
0 t
Q3
1
0 t
0000111111101101110010111010100110000111011001010100
0151413121110987654
On obtient donc un Décompteur synchrone modulo 16.
On peut réaliser le même décompteur en utilisant des bascules
synchronisées sur front montant et les sorties Qi à la place de Qi.
BEN AMARA M. & GAALOUL K. Page 29 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Chapitre 4
SYNTHESE DES COMPTEURS SYNCHRONES
1. OBJECTIFS.
Comprendre la synthèse des compteurs synchrones.
Comprendre la synthèse des décompteurs synchrones.
2. INTRODUCTION
A chaque impulsion d’horloge, cette dernière subit une transition. Il existe quatre
transitions possibles qui peuvent être respectées par une table de transitions ou
par un graphe des états.
Sorties
Transition Description Notation
Qn Qn+1 0
0 0 0
Maintien à 0 Enclenchement Déclenchement Maintien à 1
1 0 1
1 0
2 1
3 1 1
Table des transitions
1
0 0 1
Graphe des états
Le tableau ci-dessous donne une récapitulation des transitions pour les
différentes bascules :
Bascule JKBascule RS Bascule DBascule T DT
Transition Notation 00
J K S R
0 0 11
0
0 1 1 01
0
D’après le 1tableau ci-dessus
on peut
1 conclure
0 que si on
10 veut utiliser :
1
2 0 0
1
3
BEN AMARA M. & GAALOUL K. Page 30 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Des bascules JK
On regroupe obligatoirement les enclenchements () et
facultativement les déclanchements () et les maintiens à 1 (1)
pour les équations des J.
On regroupe obligatoirement les déclenchements () et
facultativement les enclenchements () et les maintiens à 0 (0)
pour les équations des K.
Des bascules RS
On regroupe obligatoirement les
enclenchements () et
facultativement les maintiens à 1 (1) pour les équations des S.
On regroupe obligatoirement les
déclenchements () et
facultativement les maintiens à 0 (0) pour les équations des R.
Des bascules D
On regroupe obligatoirement les enclenchements () et les
maintiens à1 (1) pour les équations des D.
Des bascules T
On regroupe obligatoirement les enclenchements () et les
déclanchements () pour les équations des T.
3. EXEMPLES
3.1 Exemple 1 : compteur modulo 12
On veut réaliser un compteur modulo 12 en utilisant des bascules JK, RS et T
Solution
Pour concevoir ce compteur, il faut déterminer le nombre des bascules puis les
équations pour chaque entrée.
Avec 3 bascules on peut réaliser 23=8 combinaisons et avec 4 bascules on peut
réaliser 24=16 combinaisons et un compteur modulo 12 nécessite donc
4 bascules puisque le nombre 2n qui est le premier plus grand ou égal à 12 est
16.
BEN AMARA M. & GAALOUL K. Page 31 A.U. 2015/2016
0 0 0 1 0 0 1 0
0 0 1 0 0 0 1 1
0 0 1 1 0 1 0 0
ISET de Nabeul 0 1 0 0 0 1 0 Cours1 de Système logique (2)
0 1 0 1 0 1 1 0
0 1 1 0 0 1 1 1
0 1 1 1 1 0 0 0
Table de vérité 1 0 0 0 1 0 0 1
1 0 0 1 1 0 1 0
1 0 1 0 1 0 1 1
1 0 1 1 0 0 0 0
0 0 0 0 0 0 0 1
0
1
On peut la présenter aussi par le tableau de KARNAUGH ci-dessous :
2
3
4
5
6Séquences Bascule Q0
Q3 Q2 Q1 Q0 7 Q3 Q2 Q1 Q0
Q1Q000 Q1QQ 001 1Q0 11
Q3Q2 8 Q3Q201Q3Q211Q3Q210 3Q2Q
00 Q3Q201Q3Q211Q3Q210
Q1Q010
Q1Q0000001 9 01011001
Q1Q0010010 1 01101010
0 10000000
Q1Q0 110100 1 01111011
Q1Q0100011
Bascule JK J0=K0=1
Bascule RS R0=Q0; S0=Q0
Bascule T T0=1
BEN AMARA M. & GAALOUL K. Page 32 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Bascule Q1
Q3 Q2 Q1 Q0
Q1Q000 Q1QQ
001
3Q2Q
00 11
1Q 0 Q 3Q201Q3Q211Q3Q210
Q1Q010
0 00 Bascule JK : J1=K1=Q0
Bascule RS : R1=Q1Q0 ; S1=Q1Q0
1 11 Bascule T : T1=Q0
Bascule Q2
Q3 Q2 Q1 Q0
Q1Q000 Q1QQ
001
3Q2Q
001Q0 11
Q3Q201Q3Q211Q3Q210
Q1Q010
0 10 Bascule JK : J2= Q3Q1Q0 ; K2=Q1Q0
0 10
0 Bascule RS : R2=Q3Q2Q1Q0 ;
0 10 S2=Q1Q0
Bascule T : T2= Q3Q1Q0
Bascule Q3
Q3 Q2 Q1 Q0
Q1Q000 Q1QQ
001 00
3Q2Q 1Q0 11
Q3Q201Q3Q211Q3Q210 Bascule JK : J3= Q2Q1Q0
Q1Q010
0 01 K3=Q1Q0
0 01
0 Bascule RS : R3=Q2Q1Q0
0 01 S3=Q3Q1Q0
Bascule T : T3= Q1Q0(Q3+Q2)
BEN AMARA M. & GAALOUL K. Page 33 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Réalisation à l’aide des bascules T
2 2 2 23
T0 Q0 T1Q1 T2Q2 T3Q3
1
H0Q0 H1Q1 H2Q2 H3Q3
Remarque :
Après la synthèse du compteur synchrone, il faut vérifier si ce compteur est
autocorrectif ou non c’est-à-dire que si par accident quelconque on se trouve
dans une combinaison des sorties qui est hors cycle il faut vérifier que ce
compteur peut revenir au cycle après quelques impulsions.
Par exemple pour le compteur précèdent :
1011 0000 1100
1010 0001 1101
1001 0010 1110
1000 0011 1111
0111 0100
Séquence hors
0110 0101 cycle
Cycle normal du compteur
Du compteur modulo 12
BEN AMARA M. & GAALOUL K. Page 34 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
3.2 Exemple 2 : compteur décompteur modulo 16
On veut réaliser un compteur/décompteur modulo 16 en utilisant des bascules
JK. Le changement du mode de fonctionnement est assure à l’aide d’une
entrée de commande A (si A=0 : mode comptage ; si A=1 : mode décomptage)
Solution
Pour concevoir ce compteur, il faut 4 bascules on peut réaliser 24=16
combinaisons. On va utiliser le théorème d’expansion de CHANNON pour
n’utiliser que 4 variables
Table de vérité du comptage (A=0)
Etat précèdent Etat suivant
Transition
Q3 Q2 Q1 Q0 Q3 Q2 Q1 Q0
0 0 0 0 0 0 0 0 1
1 0 0 0 1 0 0 1 0
2 0 0 1 0 0 0 1 1
3 0 0 1 1 0 1 0 0
4 0 1 0 0 0 1 0 1
5 0 1 0 1 0 1 1 0
6 0 1 1 0 0 1 1 1
7 0 1 1 1 1 0 0 0
8 1 0 0 0 1 0 0 1
9 1 0 0 1 1 0 1 0
10 1 0 1 0 1 0 1 1
11 1 0 1 1 1 1 0 0
12 1 1 0 0 1 1 0 1
13 1 1 0 1 1 1 1 0
14 1 1 1 0 1 1 1 1
15 1 1 1 1 0 0 0 0
BEN AMARA M. & GAALOUL K. Page 35 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
On peut la présenter aussi par le tableau de KARNAUGH ci-dessous
Séquences Bascule Q0
Q3 Q2 Q1 Q0 Q3 Q2 Q1 Q0
Q1Q000 Q1QQ
001
3Q2Q
001Q0 11
Q3Q201Q3Q211Q3Q210 Q1Q000 Q1QQ
001
3Q2Q
001Q0 11
Q3Q201Q3Q211Q3Q210
Q1Q010 Q1Q010
0001 010111011001
0010 011011101010
0100 100000001100
0011 011111111011
Bascule 0 :J0=K0=1
Bascule Q1
Q3 Q2 Q1 Q0
Q1Q000 Q1QQ
001
3Q2Q
001Q0 11 Q3Q201Q3Q211Q3Q210
Q1Q010
0 000
Bascule 1 : J =K =Q
1 1 0
1 111
Bascule Q2
Q3 Q2 Q1 Q0
Q1Q000 Q1QQ
001
3Q2Q
001Q0 11
Q3Q201Q3Q211Q3Q210
Q1Q010
0 110
0 110 Bascule 2 : J2=Q1Q0 ;
0 110 K2=Q1Q0
BEN AMARA M. & GAALOUL K. Page 36 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Bascule Q3
Q3 Q2 Q1 Q0
Q1Q000 Q1QQ
001
3Q2Q
001Q0 11
Q3Q201Q3Q211Q3Q210
Q1Q010
0 011 Bascule 3 : J = Q Q Q
3 2 1 0
0 011
K=Q QQ
0 1 3 2 1 0
0 011
Table de vérité du décomptage (A=1)
Etat précèdent Etat suivant
Transition
Q3 Q2 Q1 Q0 Q3 Q2 Q1 Q0
0 0 0 0 0 1 1 1 1
1 0 0 0 1 1 1 1 0
2 0 0 1 0 1 1 0 1
3 0 0 1 1 1 1 0 0
4 0 1 0 0 1 0 1 1
5 0 1 0 1 1 0 1 0
6 0 1 1 0 1 0 0 1
7 0 1 1 1 1 0 0 0
8 1 0 0 0 0 1 1 1
9 1 0 0 1 0 1 1 0
10 1 0 1 0 0 1 0 1
11 1 0 1 1 0 1 0 0
12 1 1 0 0 0 0 1 1
13 1 1 0 1 0 0 1 0
14 1 1 1 0 0 0 0 1
15 1 1 1 1 0 0 0 0
BEN AMARA M. & GAALOUL K. Page 37 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
On peut la présenter aussi par le tableau de KARNAUGH ci-dessous
Séquences Bascule Q0
Q3 Q2 Q1 Q0 Q3 Q2 Q1 Q0
Q1Q000 Q1QQ
001 00
3Q2Q 1Q0 11
Q3Q201Q3Q211Q3Q210 Q1Q000 Q1QQ
001 00
3Q2Q 1Q0 11
Q3Q201Q3Q211Q3Q210
Q1Q010 Q1Q010
1111 001110110111
0000 010011001000
0010 011011101010
0001 010111011001
Bascule 0 :J0=K0=1
Bascule Q1
Q3 Q2 Q1 Q0
Q1Q000 Q1QQ
001
3Q2Q
001Q0 11 Q3Q201Q3Q211Q3Q210
Q1Q010
Bascule 1 : J1=K1=Q0
0 000
1 111
Bascule Q2
Q3 Q2 Q1 Q0
Q1Q000 Q1QQ
001
3Q2Q
001Q0 11 Q3Q201Q3Q211Q3Q210
Q1Q010
Bascule 2 : J2=Q1Q0 ;
0 110
K2=Q1Q0
0 110
0 110
BEN AMARA M. & GAALOUL K. Page 38 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Bascule Q3
Q3 Q2 Q1 Q0
Q1Q000 Q1QQ
001 00
3Q2Q 1Q0 11 Q3Q201Q3Q211Q3Q210
Q1Q010
01 Bascule 3 : J3= Q2Q1Q0
0 011
0 011 K3= Q2Q1Q0
0 011
Equations finales
Bascule 0 : J0=K0=A.1+A.1=1
Bascule 1 : J1=K1=AQ0+AQ0
Bascule 2 : J2=K2=AQ1Q0+AQ1Q0
Bascule 3 : J2=K2=AQ2Q1Q0+A Q2Q1Q0
2 2 2 23
J0 Q0 J1Q1 H1 J2Q2 H2 J3 Q3
1
H0 K1 K2 H3
K0 K3
1 Q1
Q0 Q2 Q3
BEN AMARA M. & GAALOUL K. Page 39 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
BIBLIOGRAPHIE et WEBOGRAPHIE
Bibliographie:
❶ Titre : Circuits Numériques Théorie et Applications.
Auteur : Ronald J.Tocci.
Editeur : Reynald Goulet inc.
Année : 1996.
ISBN : 2-89377-108-4.
❷ Titre : Cours et Problèmes d’Electronique Numérique.
Auteur : Jean-Claude Laffont, Jean-Paul Vabre.
Editeur : Edition Marketing.
Année : 1986.
ISBN : 2-7298-8650-8.
❸ Titre : Logique Combinatoire et Technologie.
Auteurs : Marcel Gindre, Denis Roux.
Editeur : BELIN.
Année : 1984.
ISBN : 2-7011-0857-8.
❹ Titre : Systèmes Numériques.
Auteurs : Jaccob Millman, Arvin Grabel .
Editeur : McGRAW-HILL.
Année : 1989.
ISBN : 2-7042-1182-5.
❺ Titre : Electronique Numérique.
Auteurs : Rached Tourki .
Editeur : Centre de publication Universitaire.
Année : 2005.
ISBN : 9973-37-019-8.
❻ Titre : Support de cours de Systèmes Logiques.
Auteurs : Mohamed Habib BOUJMIL.
Année : 2004/2005.
❼ Titre : Support Pédagogique de Systèmes Logiques.
Auteurs : Fedia DOUIRI.
Année : 2011/2012.
BEN AMARA M. & GAALOUL K. Page 40 A.U. 2015/2016
ISET de Nabeul Cours de Système logique (2)
Sites Web :
http://didier.villers.free.fr/STI-2D/tronc-commun-activites.htm
http://pageperso.lif.univ-mrs.fr/~severine.fratani/enseignement/lib/exe/fetch.php?media=archi:td4-
seq.pdf
http://users.polytech.unice.fr/~fmuller/doc/ens/Peip2-SujetTP.pdf
http://ensa-mecatronique.e-monsite.com/medias/files/compteurs-cor.pdf
http://sebastien.bernard.free.fr/cours-tp-td-exo/TD-E-Logique-sequentielle-Fonction-Comptage.pdf
http://ressource.electron.free.fr/cours/Exercice_de_logique_sequentielle.pdf
BEN AMARA M. & GAALOUL K. Page 41 A.U. 2015/2016
Vous aimerez peut-être aussi
- PLD Proteus PDFDocument19 pagesPLD Proteus PDFSalah DAHOUATHIPas encore d'évaluation
- TP1 MatLabDocument4 pagesTP1 MatLabSidahmed LarbaouiPas encore d'évaluation
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Devoir 2 Palier 1 Infor 1term 1ere College - 2Document2 pagesDevoir 2 Palier 1 Infor 1term 1ere College - 2Ismail MaghPas encore d'évaluation
- Chap 4 Les Circuits SequentielsDocument17 pagesChap 4 Les Circuits SequentielsKycelle Mbouzeko100% (1)
- Cours TransformationZDocument12 pagesCours TransformationZbetaga100% (1)
- INF3500NotesDeCoursv2 5 PDFDocument188 pagesINF3500NotesDeCoursv2 5 PDFREDA SAADALLAHPas encore d'évaluation
- Book 1Document15 pagesBook 1Hossam EddinPas encore d'évaluation
- Traitement Du Signal S5: Décomposition en Série de Fourier Des Signaux PériodiquesDocument51 pagesTraitement Du Signal S5: Décomposition en Série de Fourier Des Signaux PériodiquesMohamed Aly SowPas encore d'évaluation
- Reponse Des Systemes Numeriques Freddy MudryDocument35 pagesReponse Des Systemes Numeriques Freddy MudryHerve DerouleauxPas encore d'évaluation
- Tp4 Transformation Fourier Echantillonage Signaux AnalogiquesDocument7 pagesTp4 Transformation Fourier Echantillonage Signaux AnalogiquesHamza BadrPas encore d'évaluation
- Cours Electronique Numerique 1Document41 pagesCours Electronique Numerique 1Bertrand Tueno YangwaPas encore d'évaluation
- Chapitre 4 SLDocument12 pagesChapitre 4 SLHENSCHEL ShadracPas encore d'évaluation
- M19 - Logique CombinatoireDocument136 pagesM19 - Logique CombinatoireCoolmanPas encore d'évaluation
- TD Bascules CompteursDocument3 pagesTD Bascules Compteursسكينة مريم100% (1)
- Td1+solution PDFDocument10 pagesTd1+solution PDFIslam BenanibaPas encore d'évaluation
- Logique Combinatoire Unité ATC 1STE Bouchaib MAHBABDocument35 pagesLogique Combinatoire Unité ATC 1STE Bouchaib MAHBABAymen Hssaini100% (3)
- hcs12 PDFDocument65 pageshcs12 PDFachraf_djyPas encore d'évaluation
- Circuit IntegresDocument7 pagesCircuit IntegresAbd OUPas encore d'évaluation
- A2-2 UalDocument3 pagesA2-2 UalLabossef LabossefchedlyPas encore d'évaluation
- Algobox Initiation PDFDocument5 pagesAlgobox Initiation PDFChokriSadek100% (1)
- AlgebrebooleDocument79 pagesAlgebrebooleEl Amrani LailaPas encore d'évaluation
- Maths Ind 1Document2 pagesMaths Ind 1Stessy Loko100% (1)
- Exercice Corrigé Transformation de Fourier PDFDocument24 pagesExercice Corrigé Transformation de Fourier PDFArsène KekpenaPas encore d'évaluation
- Chapitre 3 Filtrage Signaux Deterministes Temps ContinuDocument7 pagesChapitre 3 Filtrage Signaux Deterministes Temps Continuarbaoui11Pas encore d'évaluation
- Poly Electronik EeaDocument90 pagesPoly Electronik Eeaelmehdy elwardyPas encore d'évaluation
- Correction TD Electronique NumériqueDocument65 pagesCorrection TD Electronique NumériqueOussama Eljaafari100% (1)
- Cours E Simulation D Un Pic Sous ProteusDocument4 pagesCours E Simulation D Un Pic Sous ProteusHerve DerouleauxPas encore d'évaluation
- TP 3Document5 pagesTP 3Hajar TouilPas encore d'évaluation
- Partie-2-Microprocesseur + MemoireDocument14 pagesPartie-2-Microprocesseur + MemoireyaoPas encore d'évaluation
- Simplification Des Fonctions Logique A L BisDocument8 pagesSimplification Des Fonctions Logique A L BishamzaPas encore d'évaluation
- EdeB TD4 1 2020Document2 pagesEdeB TD4 1 2020Arsene SohPas encore d'évaluation
- Tous Au Niveau3Document203 pagesTous Au Niveau3tonye joel100% (1)
- TD 4Document4 pagesTD 4Mohammed BabaPas encore d'évaluation
- Epreuve BTS SE 2007Document13 pagesEpreuve BTS SE 2007Riham abPas encore d'évaluation
- ElectroniqueNumerique PDFDocument90 pagesElectroniqueNumerique PDFfekielyesPas encore d'évaluation
- Cours FPGA Et VHDLDocument66 pagesCours FPGA Et VHDLamine menadPas encore d'évaluation
- TD4 Electronique Numérique DIC1Document3 pagesTD4 Electronique Numérique DIC1Jacques GregoirePas encore d'évaluation
- Codage Et Information-Prof (Version Finale)Document143 pagesCodage Et Information-Prof (Version Finale)scar lightPas encore d'évaluation
- 5BTC Hyper Part2 09Document60 pages5BTC Hyper Part2 09Yàs SîñéPas encore d'évaluation
- Architecture Des Systèmes À ProcesseursDocument63 pagesArchitecture Des Systèmes À Processeurstarik marrakech100% (1)
- Filtres Du Second OrdreDocument4 pagesFiltres Du Second OrdreEmmanuel AkedPas encore d'évaluation
- Cours Electronique Numerique-3Document76 pagesCours Electronique Numerique-3koukihamedPas encore d'évaluation
- Automatique Lineaire Asservissement Regulation PDFDocument55 pagesAutomatique Lineaire Asservissement Regulation PDFMohamed Benrahal100% (1)
- Chapitre 5 Etude Des Signaux Deterministe Temps DiscretDocument17 pagesChapitre 5 Etude Des Signaux Deterministe Temps Discretarbaoui11100% (1)
- TD-Exceptionnel (Corrigé)Document7 pagesTD-Exceptionnel (Corrigé)Dr. Chekir AmiraPas encore d'évaluation
- TD Corrigé ARCHI 1Document8 pagesTD Corrigé ARCHI 1Dhafer MezghaniPas encore d'évaluation
- TD EP Redresseurs MonophasãsDocument10 pagesTD EP Redresseurs MonophasãsAyman AlharabiPas encore d'évaluation
- Chapitre 4 Les Compteurs Et Décompteurs Asynchrones Partie 1Document12 pagesChapitre 4 Les Compteurs Et Décompteurs Asynchrones Partie 1mohamed ben slimanePas encore d'évaluation
- Methode de Compression Codage SourceDocument29 pagesMethode de Compression Codage SourceJuba HamichePas encore d'évaluation
- Ele119 Eprm Cours TP PDFDocument368 pagesEle119 Eprm Cours TP PDFIbrahim IbrahimPas encore d'évaluation
- Traitement Du SignalDocument120 pagesTraitement Du SignalMonji Zaidi0% (1)
- Transformée en Z PDFDocument9 pagesTransformée en Z PDFAchraf BoutalPas encore d'évaluation
- Introduction Circuits Logiques Programmables - Presentation 2010Document38 pagesIntroduction Circuits Logiques Programmables - Presentation 2010fieea100% (2)
- TD LogiqueDocument22 pagesTD LogiqueLabelle AmmounaPas encore d'évaluation
- Apprendre et enseigner sur le Web: quelle ingénierie pédagogique?D'EverandApprendre et enseigner sur le Web: quelle ingénierie pédagogique?Pas encore d'évaluation
- MAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsD'EverandMAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsPas encore d'évaluation
- Twistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesD'EverandTwistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesPas encore d'évaluation
- Notice TSMS4314873 AADocument2 pagesNotice TSMS4314873 AAxaloxaloPas encore d'évaluation
- TX-SR603 FrEs 0426Document184 pagesTX-SR603 FrEs 0426Jorge MartinPas encore d'évaluation
- Cours Résumé Sur Les Timers Du PIC (PIC18F252 Et Autres)Document9 pagesCours Résumé Sur Les Timers Du PIC (PIC18F252 Et Autres)barbarePas encore d'évaluation
- PDF LogicseqDocument25 pagesPDF LogicseqYassine FalahPas encore d'évaluation
- Semaines Du Commerce Local - Octobre 2018 - LiègeDocument40 pagesSemaines Du Commerce Local - Octobre 2018 - Liègesam_pirotonPas encore d'évaluation
- 100 French Words and Phrases For Making Phone Calls in FrenchDocument4 pages100 French Words and Phrases For Making Phone Calls in FrenchVravinski TeresaPas encore d'évaluation
- Type 4 Type 3Document4 pagesType 4 Type 3ABELWALIDPas encore d'évaluation
- A.I.L. - Corrige - Quelques Exercices Ampli OpérationnelsDocument4 pagesA.I.L. - Corrige - Quelques Exercices Ampli OpérationnelsFranco FrancoPas encore d'évaluation
- Aide Memoire CssDocument1 pageAide Memoire CssModeste AkaffouPas encore d'évaluation
- Insertion de Documents Déjà Finalisés Dans E-SidocDocument5 pagesInsertion de Documents Déjà Finalisés Dans E-SidocpmommessinPas encore d'évaluation
- TPAutomatiqueDocument15 pagesTPAutomatiqueIsmail ElouargaPas encore d'évaluation
- Đề thi thử DELF B2Document9 pagesĐề thi thử DELF B2diemthanhvuPas encore d'évaluation
- Dossier Devoir TelephoneDocument5 pagesDossier Devoir Telephonecaro34400Pas encore d'évaluation
- 7619 3elev Dossierressourcesshark 1 PDFDocument9 pages7619 3elev Dossierressourcesshark 1 PDFmabroukPas encore d'évaluation
- Efm M9 Techniques de Programmation StructureeDocument2 pagesEfm M9 Techniques de Programmation Structureeapi-26420184100% (4)
- TD1Document2 pagesTD1minzo9479Pas encore d'évaluation
- Hack Et Astuce Pour Top Eleven TAfA lAfA ChargeurDocument2 pagesHack Et Astuce Pour Top Eleven TAfA lAfA Chargeurglamorousicon2111Pas encore d'évaluation
- Wa0040Document4 pagesWa0040Master Sherif100% (1)
- OFDM RapportDocument23 pagesOFDM RapportAyoub Hammouga100% (1)
- Masquè Dè SaisièDocument1 pageMasquè Dè SaisièKael LasriPas encore d'évaluation
- Bo Et BFDocument4 pagesBo Et BFAbdallah BelabbesPas encore d'évaluation
- CompteurDocument2 pagesCompteurBrahamChaoucheFethallahYacinePas encore d'évaluation
- Grandjeu MissionagentsecretDocument22 pagesGrandjeu MissionagentsecretdupontPas encore d'évaluation
- Télécom Examen 2018 2Document1 pageTélécom Examen 2018 2zakiPas encore d'évaluation
- Exercices Sur La Modulation D'amplitudeDocument4 pagesExercices Sur La Modulation D'amplitudeZH Hamza100% (4)
- Cours 3A Modulation AMDocument54 pagesCours 3A Modulation AMDON DEVATTI67% (3)
- Notice Installation Recepteur Lumiere Io On-OffDocument20 pagesNotice Installation Recepteur Lumiere Io On-OffsudicePas encore d'évaluation
- DVB TDocument18 pagesDVB TCàmilià MounichPas encore d'évaluation