0% ont trouvé ce document utile (0 vote)
62 vues18 pagesRésolution graphique d'un PL optimal
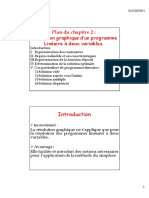
Le document décrit la construction de la région admissible pour un problème de programmation linéaire à deux variables, ainsi que la recherche de la solution optimale. Il présente également des situations spéciales comme les solutions optimales multiples, les contraintes redondantes et les problèmes non contraints ou infaisables.
Transféré par
Chiraz Ben BoubakerCopyright
© © All Rights Reserved
Nous prenons très au sérieux les droits relatifs au contenu. Si vous pensez qu’il s’agit de votre contenu, signalez une atteinte au droit d’auteur ici.
Formats disponibles
Téléchargez aux formats PDF, TXT ou lisez en ligne sur Scribd
0% ont trouvé ce document utile (0 vote)
62 vues18 pagesRésolution graphique d'un PL optimal
Le document décrit la construction de la région admissible pour un problème de programmation linéaire à deux variables, ainsi que la recherche de la solution optimale. Il présente également des situations spéciales comme les solutions optimales multiples, les contraintes redondantes et les problèmes non contraints ou infaisables.
Transféré par
Chiraz Ben BoubakerCopyright
© © All Rights Reserved
Nous prenons très au sérieux les droits relatifs au contenu. Si vous pensez qu’il s’agit de votre contenu, signalez une atteinte au droit d’auteur ici.
Formats disponibles
Téléchargez aux formats PDF, TXT ou lisez en ligne sur Scribd