Académique Documents
Professionnel Documents
Culture Documents
Cours Microprocesseur PDF
Transféré par
ferradibrTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Cours Microprocesseur PDF
Transféré par
ferradibrDroits d'auteur :
Formats disponibles
Architecture des systmes
microprocesseurs
Maryam Siadat & Camille Diou
I Introduction
Larchitecture dun ordinateur constitue lensemble des sous-systmes ralisant dif-
frentes fonctionnalits, la manire de les relier et de les faire communiquer.
Au premier sens du terme, une architecture informatique est dnie par des para-
mtres tels que les instructions du microprocesseur, les jeux de registres, la mthodologie
de gestion de la mmoire, et dautres fonctions ...
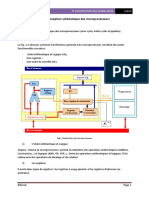
I.1 Larchitecture dun ordinateur simple
Un simple ordinateur est compos de :
mmoire (RAM/ROM) ;
un CPU;
quelques circuits dentre/sortie.
Les trois parties sont connectes par les trois bus (adresse, donnes, contrle) crs
par le CPU. Le CPU est le matre unique dans les ordinateurs simples, et cest lui qui
contrle tout le systme.
La squence des instructions (ou programme) est stocke en mmoire des empla-
cements successifs et en code binaire.
Le rle du CPU se dcompose en quatre tapes :
1. aller chercher linstruction suivante en mmoire cycle de chargement ;
2. la dcoder pour dterminer laction quil doit effectuer ;
3. lexcuter cycle dexcution ;
4. revenir ltape 1.
CPU RAM
ROM
Unit de commande
UAL, registres
Circuits dE/S
PIO, PIA, PPI
ACIA, UART, USART, SIO
timer, CNA, CAN
Mmoire
FIG. I.1: Schma synoptique dun ordinateur simple
1) Lunit centrale : (UC, CPU, MP)
Elle se compose essentiellement de lunit de commande, de lUAL et dun ensemble
de registres. LUC est organise le long dun bus (bus interne du microprocesseur, cf
gure I.2).
Remarque : les registres de lUC nont pas tous la mme taille.
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 3
I.1. Larchitecture dun ordinateur simple
Registres
gnraux programme
Pointeur de Registre
dinstruction
Registre
tampon
Registre
dadresse du temps
Controle
UAL
^
Bus interne de lUC
FIG. I.2: Schma synoptique dune unit centrale
1.a) LUAL
Elle permet deffectuer les additions et soustractions binaires, OR, AND, XOR...
Exemple de circuit : 74LS181, UAL 4 bits (cf gure I.3).
A0
A1
A2
A3
B0
B1
B2
B3
CN
M
F0
F1
F2
F3
P
CN
A=B
S3 S2 S1 S0
FIG. I.3: Schma dun 74LS181
Ce circuit ralise des fonctions arithmtiques et logiques sur A et B, avec le rsultat
dans F. Lopration est dtermine par M et par les entres de slection S0, S1, S2, et
S3 :
M=1 16 fonctions logiques ;
m=0 16 fonctions arithmtiques.
Lintrt dune UAL cest quelle peut tre programme avec des instructions bi-
naires : cest un circuit programmable. LUAL est la partie la plus importante dun pro-
cesseur, donc dun ordinateur.
Ralisation dune UAL :
elles sont souvent ralises laide des rseaux logiques programmables (PLA) ;
avec larrive des circuits LSI et VLSI, des ralisations trs structures ont t
possibles laide de MUX (slecteurs de donnes).
Exemple : additionneur complet de 1 bit laide de 2 MUX 3 entres de slection (cf
gure I.4).
Remarques :
1. pour raliser une UAL traitant des mots de n bits, il suft de brancher en cascade
n paires de slecteurs de donnes (exemple additionneur 4 bits) ;
2. pour raliser une autre opration, il suft de changer les entres des MUX.
4 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
D0
D1
D2
D3
D4
D5
D6
D7 a0 a1 a2
D0
D1
D2
D3
D4
D5
D6
D7 a2 a1 a0
0
1
1
0
1
0
0
1
0
0
0
1
0
1
1
1
S Rout
A B Rin
FIG. I.4: Additionneur complet
1.b) Lunit de commande
Son rle est :
denvoyer des signaux de contrle pour connecter les registres au bus ;
de superviser le fonctionnement de lUAL;
de donner des signaux dhorloge lensemble de lordinateur.
Toutes les actions de lunit de commande concernent les cycles de chargement et
dexcution des instructions. Par exemple, il y a besoin de signaux de contrle pour
relier les registres au bus, pour superviser le fonctionnement de lUAL, et pour donner
des signaux dhorloge lensemble de lordinateur. La plupart de ces signaux provient
de la section de contrle de lUC (voir la ralisation des squenceurs).
Cycle de chargement (cf gure I.5) :
Les instructions sont lues une par une, puis dcodes et excutes.
Pour aller chercher une instruction en mmoire, il faut excuter les oprations sui-
vantes :
1. charger le contenu du pointeur de programme dans le registre dadresse mmoire
qui est reli au bus ;
2. demander la mmoire de lire la donne, et de la placer sur le bus (signal read
memory) ;
3. ranger la valeur lue sur le bus de donnes, dans le buffer de lUC;
4. transfrer le buffer dans le registre dinstruction ;
5. incrmenter le pointeur de programme dune unit pour aller chercher linstruction
suivante.
Pour effectuer ces oprations, il faut envoyer un certain nombre de signaux de
contrle aux divers registres de lUC et la mmoire. Par exemple, pour la premire
opration, le systme de contrle doit fermer toutes les sorties de registres en direction
du bus interne, ouvrir la sortie du pointeur de programme en direction du bus, et charger
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 5
I.1. Larchitecture dun ordinateur simple
Pointeur de
programme
Registre
dinstruction
Registres
gnraux
dadresse
mmoire
Registre
UAL
Buffer MMOIRE
Bus dadresse
Bus de donnes
UC
FIG. I.5: Unit de commande
le contenu du bus dans le registre dadresse mmoire. Il faut videmment envoyer tous
ces signaux dans un ordre correct et avec un dcalage temporel correct entre eux.
Cycle dexcution :
Lensemble des oprations prcdentes se rpte chaque cycle de chargement.
Mais, selon larchitecture et la teneur de chaque instruction, la faon dont le cycle dex-
cution se droule est trs variable.
Prenons comme exemple laddition de laccumulateur et dun autre registre avec le
rsultat dans laccumulateur.
Puisque les registres sont dans lUC, la squence dexcution est :
1. transfert du contenu de laccumulateur dans lUAL;
2. transfert du contenu du registre adress vers lautre entre de lUAL;
3. dclenchement de laddition (en envoyant les signaux ncessaires dans lUAL) ;
4. retour du rsultat dans laccumulateur.
Remarque : si une instruction fait appel la mmoire le cycle est plus long.
6 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
1.c) La micro-programmation
On peut raliser le systme de commande laide des techniques classiques portant
sur la logique squentielle (squenceur cbl). Mais il est de plus en plus frquent dop-
rer laide de la micro-programmation (squenceur micro-programm), cest--dire que
lensemble des oprations dcrites prcdemment (cycles de chargement et dexcution)
peuvent tre considres comme un programme qui tourne sur un processeur trs simple.
En programmant ce niveau, on demande que les instructions soient excutes dans un
ordre correct et que chaque instruction donne la combinaison correcte des signaux de
contrle. En fait la section de commande est micro-microprocesseur .
I.2 Les processeurs spcialiss
1) Micro-contrleurs
Ils contiennent un CPU, de la RAM, de la ROM, quelques ports dE/S parallles, des
ports sries, des compteurs programmables (timers), des CAN/CNA, des interfaces pour
rseaux de terrain ...
Ils sont en gnral utiliss pour contrler des simples machines (appareils lectro-
mnagers, lecteurs de carte puce...)
Exemple de circuits :
80C186XX (80186, 16 bits, Intel)
68HC11, 68HC12 (6809, 8 bits, Motorola)
68HC16 (68000, 16 bits, Mototrola)
C167XX (Inneon, ex Siemens)
2) Digital Signal Processor (sorties)
Ce sont des processeurs ddis aux traitements des signaux numriques. Une archi-
tecture particulire leur permet un traitement efcace des fonctions complexes telles que
FFT, convolution, ltrage numrique ...
Exemples :
TMS320 (Texas Instrument)
2100 et 21000 (Analog Device)
56000 (Motorola)
3) Processeurs de traitement dimage
4) Processeurs spcialiss dentres/sorties
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 7
I.2. Les processeurs spcialiss
8 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
II Les diffrentes architectures
II.1 Architecture uniprocesseur
1) Architecture Von Neumann (1946)
Architecture conventionnelle, la plus utilise dans le domaine des ordinateurs. Elle
repose sur quatre entits principales (cf gure II.1) :
UAL Unit dE/S Mmoire Unit de commande
UC
FIG. II.1: Architecture de Von Neumann
Un seul processeur (unit centrale) travaille de manire squentielle sur des infor-
mations en mmoire qui constituent la fois les donnes et les programmes : une seule
unit de commande traitant une seule squence dinstruction (Single Instruction Stream)
et une seule unit dexcution (UAL) traitant une unique squence de donnes (Single
Data Stream). Cette architecture est donc appele SISD (Single Instruction Single Data).
Un bus unique relie les diffrents modules.
Cette architecture commande unique constitue un frein au traitement parallle.
2) Architecture de Harvard (1940, la premire employe pour les ordina-
teurs)
Mmoire de programme Mmoire de donnes
Unit dE/S Unit de commande UAL
UC
FIG. II.2: Architecture de Harvard
Elle est caractrise par la sparation des donnes et programmes en mmoire. Lac-
cs chacun seffectue par un bus spar, diffrent et indpendant. Donc un accs si-
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 9
II.2. Architectures parallles
multan aux instruction et aux donnes est possible, ce qui implique une excution plus
rapide.
Cette architecture est abandonne sur les ordinateurs universels en raison de sa com-
plexit matrielle, mais elle est avantageuse pour les systmes de traitement numrique
de s signaux. Le 4004 (premier processeur Intel) relve de cette architecture, de mme
que la plupart des processeurs DSP.
3) Temps partag ou multitche
Cest lexcution simultane de plusieurs programmes (par exemple compiler un
programme pendant quon travaille sur un manuscrit sous traitement de texte).
Cette possibilit repose sur une technique de commutation rapide entre les diffrents
programmes. Le temps du processeur est alors partag en petits incrments (par exemple
20 ms). Les tches sont excutes les unes aprs les autres, chacune pendant ce temps.
Ce fonctionnement peut tre ralis par un logiciel (par exemple Linux), mais cest plus
efcace lorsque cela est directement gr par lunit centrale.
Inconvnients :
si le processeur ne marche pas, toutes les tches sont en attente ;
il y a saturation si le nombre dutilisateurs ou de tches augmente.
II.2 Architectures parallles
1) Architectures avec cadencement des donnes
UAL UAL UAL
Unit de commande
Mmoire centrale
UC
FIG. II.3: Architecture avec cadencement de donnes
Cette architecture ot de donnes soppose une architecture traditionnelle dite
ot dinstructions. Cette conguration est appele SIMD (Single Instruction Multiple
Data) et ce type de processeur processeur vectoriel .
On peut classer dans cette catgorie les processeurs vectoriels disposant des
instructions vectorielles (exemple dapplication : addition de deux vecteurs en virgule
10 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
ottante). Lunit de commande envoie une instruction toutes les UAL qui excutent
linstruction pas pas sur des donnes locales. Le rseau dinterconnexions permet aux
rsultats dtre envoys vers une autre UAL qui pourra les utiliser comme oprande dans
une instruction suivante. Les processeurs DSP utilisent cette architecture.
2) Architecture multiprocesseurs (MIMD)
Processeur 2 Processeur 1 Processeur n
Mmoire centrale
FIG. II.4: Architecture MIMD
Plusieurs processeurs partagent la mme mmoire.
Chaque unit centrale (processeur) dispose de son propre programme indpendant.
Plusieurs distributions architecturales sont possibles :
architecture centralise (cf gure II.5) :
Microprocesseur
central
Micro 1
Micro 2
Mmoire
centrale
Micro 3
FIG. II.5: Architecture centralise
architecture horizontale (cf gure II.6) :
Micro 1 Micro 2 Micro n
Bus
FIG. II.6: Architecture horizontale
chaque microprocesseur est soit un processeur central, soit un processeur spcia-
lis (E/S par exemple).
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 11
II.2. Architectures parallles
Chaque processeur constitue une ressource pour le systme.
structure hybride (cf gure II.7) :
Micro 1 Micro 2
Mmoire
locale
Mmoire
locale
Mmoire
locale
Micro n
Bus
Mmoire
centrale
FIG. II.7: Architecture hybride
Dans les structures prcdentes la charge du bus (transfert de donnes, communi-
cation entre les processeurs) freine lefcacit de larchitecture multiprocesseurs.
Lintroduction de mmoire locale associe chaque processeur permet dliminer
les accs la mmoire centrale
hirarchie de bus (cf gure II.8) :
Micro 0 Micro 1 Mm. 1 Micro 2 Mm. 2
Bus dE/S
Bus intermodule
FIG. II.8: Hirarchie de bus
Une autre mthode de dcharger le bus consiste raliser une hirarchie de bus.
Celle-ci peut tre tendue aux E/S.
3) Processeur multi-units de traitement
Cette architecture na de sens que si le temps de chargement et de dcodage est faible
par rapport la dure de son excution.
4) Processeur pipeline
Lide est inspire de lorganisation du travail la chane : cette technique permet
deffectuer davantage de travail par unit de temps.
chaque tape de lexcution de linstruction (chargement, dcodage, recherche des
donnes) se fait dans une unit spare :
12 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
Unit de commande
additionneur multiplieur diviseur comparateur
Calcul
logique
Calcul
flottant
Registre
dcalage
Mmoire
centrale
Analyse des instructions
FIG. II.9: Processeur multi-units de traitement
Recherche de linstruction
Analyse de linstruction
Unit de calcul dadresse
Unit de recherche de donnes
Excution de linstruction
Mmoire
centrale
UC
FIG. II.10: Processeur pieline
la premire est charge dans la premire unit ;
la deuxime unit commence dcoder linstruction pendant que la premire tra-
vaille charger la deuxime instruction ;
un peu plus tard, la troisime unit travaille sur le calcul dadresse pendant que
la deuxime unit dcode la deuxime instruction, et que la premire unit charge
linstruction suivante (exemple : IBM 360/195, CDC STAR).
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 13
II.3. Architecture RISC (Reduced Instruction Set Computer
II.3 Architecture RISC (Reduced Instruction Set Computer
Architecture dans la quelle les instructions sont en nombre rduit (chargement, bran-
chement, appel sous-programme) et elle sont frquemment utilises. Le but est dli-
miner les instructions rarement employes et de consacrer les ressources matrielles
excuter les instructions relativement simples en un cycle dhorloge et muler les
autres instructions laide des squences bases sur les instructions lmentaires. On
trouve donc une meilleure performance une vitesse donne (le gain en performance
envisageable est important mais dpend de la qualit du compilateur).
Caractristiques des machines RISC :
1. un cycle dhorloge au maximum pour lexcution dune instruction ;
2. une dpendance pus forte par rapport aux compilateurs ;
3. toutes les instructions ont la mme longueur ;
4. une utilisation systmatique des registres (gnralement plus nombreux que sur
les processeurs CISC) ;
5. squenceur cbl plutt que programm ;
6. une limitation des accs mmoire aux deux oprations LOAD et STORE.
Stations de travail quipes de processeurs architecture RISC : SUN, HP, IBM.
Processeurs RISC : Alpha (DEC), PowerRISC (IBM), SPARC (SUN), PA-RISC (HP).
II.4 Architecture CISC (Complex Instruction Set Computer)
Cest une architecture avec un grand nombre dinstructions. Le processeur doit ex-
cuter des tches complexes par instruction unique. Donc, pour une tche donne, une ma-
chine CISC excute un petit nombre dinstructions mais chacun ncessite un pus grand
nombre de cycles dhorloge (Pentium et PowerPC). Actuellement les deux technologies
convergent : les processeurs CISC (Pentium par exemple) utilisent des instruction de
plus en plus simples et excutent parfois plusieurs instructions en un cycle dhorloge.
14 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
III Les mmoires semi-conducteur
La mmoire contient le progrmme (sous forme dinstructions codes en binaire) et
les donnes (informations utilisables au cours de lexcution).
On trouve la mmoire soit dans un CI soit dans une partie du microprocesseur.
La mmoire est un ensemble de cellules de mme taille (en gnral 8 bits). Chaque
cellule est atteignable par une adresse unique qui lui est propre. On dit alors que la
mmoire est accs alatoire.
lintrieur de chaque circuit mmoire un dcodeur active le mot slectionn, une
logique de contrle dnit le sens des changes. Cette adresse permet tous les sous-
systmes de lordinateur daccder linformation qui y et stocke.
La structure de base (cf gure III.1) :
Mmoire
CS W R
Bus de donnes
Bus dadresse
FIG. III.1: Structure de base dune mmoire
Deux oprations sont possibles : lecture ou criture.
Les caractristiques de choix :
Taille physique, vitesse (environ quelques dizaines de ns), consommation et niveaux
logiques (caractristiques idales : faible prix, vitesse leve).
III.1 Classication des mmoires
1) Mmoires vives : RAM
Elles sont souvent qualies de RAM (Random Access Memory), mais les mmoires
mortes sont galement accs alatoire, donc de type RAM.
Elle ncessite une nergie pour stocker et garder les donnes. Il existe deux types de
mmoires vives : statiques et dynamiques.
1.a) RAM Statique (SRAM)
La ralisation interne est essentiellement faite par une matrice de bascules :
m bascule sde large, o m est la taille du mot ;
2
n
bascules de long, o 2
n
est la capacit en mots de la mmoire.
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 15
III.1. Classication des mmoires
Entre Sortie Entre Sortie Entre Sortie Entre Sortie
Mot 0
Mot 1
Mot 2
Mot 2
n
bit 0 bit 1 bit 2 bit m
FIG. III.2: Matrice organise en mots avec slection linaire : 2
n
mots 2
n
lignes, m bits m
colonnes.
Cette ralisation est simple mais elle ncessite un dcodeur interne 2
n
sorties, donc
une surface de boitier importante. Elle a cependant un accs rapide.
Remarque : il existe aussi la mthode de dcodage deux niveaux (two level decoding).
1.b) RAM dynamique (DRAM)
Les 1 et les 0 sont stocks comme une charge lectrique dans un condensateur. Pour
maintenir linformation il faut la rcrire rgulirement (rafrachissement environ toutes
les 2 ms), car le condensateur se dcharge dans les rsistances de fuite.
Une opration de lecture rafrachit une ligne de la mmoire, pa consquent toute la
mmoire est rafrchie en 2
n
lectures.
On peut utiliser des composants tels que des dRAM refresh controller, mais depuis
lutilisation de technologie VLSI, la plupart des DRAM ont leur propre circuit de rafra-
chissement.
Les DRAM sont constitues selon une matrice (2
n
lignes et 2
n
colonnes) dont
ladressage des cellules se fait en deux temps : adressage des lignes puis adressage des
colonnes.
Lavantage des DRAM par rapport aux SRAM est que leur surface est environ quatre
fois plus petite capacit identique.
Exemple de boitier : Intel 2118, 163841 bits, 16 kbits (cf gure III.3).
Remarques :
les DRAM sont des boitiers de x1 bits.
SRAM : il existe des botiers de 64 Mbits congurables en 8, 16 ou 32 bits ;
DRAM : bientt des 16 Mbits.
16 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
A0
A1
A2
A3
A4
A5
A6
5V
0V
Dout
Din
CAS RAS WE
FIG. III.3: Boitier Intel 2118
Actuellement les SRAM sont surtout utilises pour lantmoire et les DRAM pour la
mmoire principale. Il existe :
DRAM FPM (fast page mode asynchrone jusqu 25 ou 33 MHz ;
une certaine priode, la mmoire FPMtait la forme la plus courante de DRAMdans les
ordinateurs. Elle tait si frquente que lon parlait simplement de DRAM , en oubliant
FPM . La technologie de mmoire FPM offrait un avantage sur les prcdentes car
elle permettait un accs plus rapide aux donnes situes sur une mme range.[RAM]
EDO DRAM (extended data out) jusqu 66 MHz ;
Apparue en 1995, la mmoire EDOreprsentait une nouvelle innovation dans ce domaine.
Similaire la FPM, elle comportait pourtant une lgre modication, autorisant des accs
mmoire conscutifs bien plus rapides. Le contrleur de mmoire gagnait du temps en
supprimant quelques tapes dans le processus dadressage. Avec une EDO, ladressage
de la mmoire par la CPU seffectue une vitesse suprieure de 10 15 % par rapport
une FPM.[RAM]
SDRAM : DRAM synchrone jusqu 200 MO/s
Fin 1996, les SDRAM ont commenc quiper les systmes. la diffrence des technolo-
gies antrieures, la SDRAM se synchronise elle-mme avec la CPU. Ainsi, le contrleur
de mmoire connat le cycle dhorloge exact o les donnes seront disponibles. Donc,
la CPU nattend plus entre les accs mmoire. Les puces SDRAM bncient des modes
entrelacement et rafale , qui acclrent galement la recherche en mmoire. Les
modules SDRAM sont disponibles en diffrentes frquences, assurant ainsi la synchroni-
sation avec la vitesse dhorloge du systme o elles sont implantes. Par exemple, une
SDRAM PC66 est cadence 66 MHz, une SDRAM PC100 100 MHz, une SDRAM
PC133 133 MHz, et ainsi de suite... Des valeurs suprieures tels que 200 MHz et 266
MHz sont actuellement en cours de dveloppement.[RAM]
DDR SDRAM : fonctionne sur les deux fronts de lhorloge
La DDR SDRAM reprsente la gnration suivante de la technologie SDRAM. Elle permet
la puce mmoire deffectuer des transactions la fois durant la phase montante et durant
la phase descendante du cycle dhorloge. Par exemple, avec une DDR SDRAM, un bus
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 17
III.1. Classication des mmoires
mmoire 100 ou 133 MHz gre un dbit de donnes rel de 200 MHz ou 266 MHz. Des
systmes dots de DDR SDRAM sont apparus n de lan 2000.[RAM]
RAMBUS
Direct Rambus est une nouvelle norme darchitecture et dinterface de DRAM qui repr-
sente un d par rapport la conguration classique de la mmoire principale. Compare
aux anciennes technologies, Direct Rambus est extraordinairement plus rapide. Elle est
capable de transfrer les donnes une vitesse atteignant 800 MHz via un bus troit (16
bits), appel Direct Rambus Channel. Cette vitesse dhorloge leve est rendue possible
grce un dispositif "double horloge," qui autorise les transactions la fois durant la
phase montante et durant la phase descendante du cycle dhorloge. Donc chaque disposi-
tif de mmoire dun module RDRAM gnre une bande passante atteignant 1,6 giga-octet
par seconde - le double de celle disponible sur les SDRAM 100 MHz courantes.[RAM]
Autres technologies de mmoires [RAM]
ESDRAM : Enhanced SDRAM
An daugmenter la vitesse et lefcacit des modules mmoire standard, certains fabri-
cants ont incorpor une petite quantit de SRAM directement sur la puce, crant ainsi un
cache intgr. Une ESDRAM est donc essentiellement une SDRAM plus une petite quan-
tit de cache SRAM qui autorise un fonctionnement en rafale jusqu 200 MHz. Comme
avec un cache externe, la DRAM place les donnes le plus frquemment utilises dans le
cache SRAM an de rduire les accs la DRAM, moins rapide. Lun des avantages de
la SRAM sur puce est quelle permet la mise en place dun bus plus large entre la SRAM
et la DRAM, augmentant ainsi la bande passante et la vitesse de la DRAM.
FCRAM : Fast Cycle RAM
La FCRAM, dveloppe conjointement par Toshiba et Fujitsu est destine des applica-
tions spciques comme les serveurs volus, les imprimantes ou les systmes de commu-
tation dans les tlcommunications. Elle inclut une segmentation et un pipelinage interne,
qui acclrent les accs alatoires et rduisent la consommation lectrique.
SLDRAM : Synclink DRAM
Bien quelle soit considre comme obsolte aujourdhui, la SLDRAM a t dveloppe
par un groupe de fabricants de DRAM comme variante de la technologie Rambus, en n
dannes 1990.
VCM : Virtual Channel Memory
Dveloppe par NEC, la VCM permet diffrents bancs de mmoire dtablir de ma-
nire autonome une interface avec le contrleur de mmoire, grce un tampon. Il est
ainsi possible dattribuer diffrentes tches systme leurs propres canaux virtuels ;
de plus, les informations concernant une fonction ne partagent pas lespace tampon avec
dautres tches simultanes, ce qui rend le fonctionnement plus efcace.
2) Mmoires mortes : ROM
Elles sont ralises en technologie MOS et bipolaire. Ces mmoire trouvent leur
application dans la conversion de code, a gnration de caractres pour lafchage sous
forme de matrice de points, le stockage de certains programmes systme.
18 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
Elle ne ncessite pas dnergie pour conserver leur information. En gnral, seule la
lecture est possible. Il en existe plusieurs tpes :
ROM : Read only memory
Elles sont programmes en usine et ne peuvent pas tre reprogrammes ;
PROM : Programmable read only memory
Programmables par lutilisateur, elle ne peuvent pas tre reprogrammes ;
EPROM : erasable programmable read only memory. Encore appeles UV-
PROM, elles sont programmables par lutilisateur et effaables par effet photo-
lectrique laide dUV par la fentre place au-dessus du botier.
Remarque : les EPROM sont programmable par octet, mais effaables dans len-
semble. Il existe une variable OTP (one time programmable). Leur capacit va
jusqu 16 Mbits.
Exemple de botier : 2716. Lors de la programmation, il faut des impulsions de 50
ms sur prog (cf gure III.4).
A0
A11
VPP(25V) CE/prog
OE
D0
D7
FIG. III.4: Boitier 2716
EEPROM : Electricaly erasable programmable read only memory.
Elle peut tre efface lectriquement et reprogramme dans lapplication par octet.
Remarque : les RAM sont accessibles bit par bit. Sa capacit atteint 4 Mbits.
Lendurance est limite contrairement celle des RAM qui est innie. Elle est
moins rapide en criture que les RAM.
Flash EPROM :
La mmoire ash est une mmoire semiconducteurs, non volatile et rinscriptible, qui
fonctionne comme la combinaison dune RAM et dun disque dur. La mmoire ash stocke
les bits de donnes dans des cellules de mmoire, comme une DRAM, mais elle fonctionne
comme un disque dur, dans la mesure o les donnes sont conserves en mmoire lorsque
lalimentation lectrique est coupe. En raison de sa vitesse leve, de sa durabilit et de
sa faible consommation, la mmoire ash est idale pour de nombreuses applications -
comme les appareils photos numriques, les tlphones cellulaires, les imprimantes, les
ordinateurs portables, les rcepteurs dondes radio de poche et les dispositifs denregis-
trement sonore.[RAM]
Elle est programmable et effaable lectriquement comme les EEPROM. La seule
diffrence provient de la structure interne et de la technologie utilise qui permet
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 19
III.2. Interface mmoire
un meileur compromis vitesse/capacit.
Les ash sont programmables par octet et effaables soit dans leur ensemble
(comme les EPROM) soit par secteur (secteur > 1 octet). Leur capacit va de 16
128 Mbits en 2002, des capacits de 256 512 Mbits doivent apparatre courant
2003. Il existe des mmoires ash monotension (pour lalimentation de la lecture
et de leffacement) : elles remplaceront peut-tre terme les DRAM.
Remarque gnrale : les ash EPROM prennent actuellement plus de 50% du
march europen des mmoires non volatiles.
FRAM : Ferroelectric RAM.
Elle combine les performances de L/Eillimite des DRAM et la non volatilit. Sa
capacit est de 256 Kbits (trs faible).
PLA : Programmable logic array
Les PLA sont similaires aux ROM mais diffrents par leur structure interne. Ils
permettent de produire des fonctions logiques spciales. Ils sont mask program-
mable (MPLA) ou eld programmable (FPLA). Le PLA de base possde deux
matrices ET et OU permettant de raliser directement des sommes de produit :
matrice ET en entre, matrice OU en sortie.
III.2 Interface mmoire
Les lignes de donnes sont bidet 3 tats (sinon conit sur le bus) : lors de la lecture
seulement un des CI mmoire doit tre valid un instant donn.
Les cirucits INS8202 ou 74LS244 sont des octuples buffer/drivers de lignes et per-
mettent dinterfacer les lignes de donnes.
Les dcodeurs, qui permettent de dcoder les lignes dadresse, sont un autre type de
circuits dinterface mmoire.
III.3 Les diffrents type de mmoires vives dun ordinateur
On distingue plusieurs types de mmoires vives en fonction de :
leur utilisation ;
leur vitesse ;
leur mode dadressage ;
leur mode daccs aux donnes.
1) Les registres
Un registre est un ensemble ordonn de bascules dans lequel on peut crire puis
mmoriser un mot binaire. Ce sont des mmoires particulires car linformation ny est
pas adresse.
Les registres se situent lintrieur de lunit centrale, alors que la mmoire centrale
forme un bloc fonctionnel part entire en dehors de lunit centrale. Ils offrent un temps
daccs en lecture/criture beaucoup plus faible (rapport 10) que la mmoire centrale.
20 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
Conceptuellement, les registres et mmoire centrale sont semblables : ce sont le lieu
dimplantation dans la machine, la capacit de stockage et le temps daccs aux infor-
mations quils contiennent qui les diffrencient.
les registres accessibles aux programmeurs constituent une mmoire trs petite
(en gnral 16 registres dun mot) compars aux mmoires centrales, mais ils sont
beaucoup plus rapide.
au sein de la couche microprogramme, les registres sont utiliss pour assurer le
stockage dinformations ncessaires lexcution en cours de traitement.
2) Les piles
piles FIFO : elles sont ralises partir dun ensemble de registres dont laccs
aux donnesseffectue de manire squentielle sans laide dune adresse.
La premire information mmorise sera la premire lue. Une lecture est possible
tant que toutes informations nont pas t lues. Une criture est possible tant que
la pile nest pas sature.
Application : utilisation dune FIFO asynchrone avec deux horloges pour adapter
lchange dinformation entre deux systmes de vitesse diffrente.
Exemple : transmission de lordinateur vers limprimante en adaptant la vitesse de
communication (cf gure III.5).
FIFO
FIG. III.5: Adaptation de la vitessede communication par une FIFO
Remarque : il y a une diffrence importante entre une pile FIFO et un registre
dcalage conventionnel.
piles FILO : ces piles sont en gnral implantes sous forme logicielle.
La mmoire utilise est une RAMdont ladresse est gnre par un pointeur qui est
incrment ou dcrment selon lcriture ou la lecture des informations. Ces piles
sont utilises par le CPU pour mmoriser rapidement un ensemble de donnes ou
dadresses (retour de sous-programmes par exemple).
III.4 Mmoire centrale
Cest la zone de stockage des donnes et des programmes. Elle peut tre consid-
re comme un ensemble de registres accessibles individuellement grce une adresse
spcique : mmoire accs alatoire.
La capacit de la mmoire centrale est plus ou moins importante selon le systme. Ele
est en gnral forme de plusieurs botiers de RAM : cest une association de circuits en
parallle pour crer la longueur du mot dsir (traitable par le processeur) et de circuits
en srie pour crer la capacit dsire.
Exemple : constitution de 6 kmots de 8 bits laide de botiers de 2k4 bits.
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 21
III.5. La mmoire cache, ou antmmoire
III.5 La mmoire cache, ou antmmoire
Les microprocesseurs 8 et 16 bits travaillent des vitesses environ gales aux temps
daccs mmoire : la performance dun systme tait donc due en gnral aux proces-
suers eux-mmes.
Le problme majeur avec lapparition des microprocesseurs rapides est de synchro-
niser laccs la mmoire avec la viesse du processeur (la vitesse des microprocesseur
augmente vite alors que celle des mmoires volue lentement). Autrement dit, il faut
pouvoir satisfaire assez vite les demandes en criture/lecture en mmoire pour ne pas
laisser le processeur tourner vide. La solution est la mmoire cache.
Principe : on place, entre le processeur et la mmoire centrale classique, quelques cir-
cuits de mmoire ultra-rapide (type SRAM) mais coteux ; ce bloc renfermera les l-
ments les plus utiliss lors dune tche (cf gure III.6).
Controleur de cache
^
cache Processeur rapide Mmoire centrale
FIG. III.6: Principe de la mmoire cache
Chaque fois que le processeur doit lire une donne, il commence par la cherche
dans la mmoire cache. Si elle sy trouve, il ny a alors aucune attente, sinon le systme
charge dans le cache non seulement la donne demande mais aussi toute la zone envi-
ronnante de la mmoire centrale. Grce cela la requte suivante du processeur a toutes
les chances dtre effectivemetn dans le cache (il y a duplication de linformation mais
ceci est transparent pour lutilisateur).
Remarque 1 : certains processeurs ont une mmoire cache interne (486 : 8 ko, Pentium :
16 ko, Celeron 32 ko L1 + 128 ko L2, Pentium III : 32 ko L1 + 256 ko L2, Athlon : 128
ko L1 + 256 ko L2, Pentium 4 : 32 ko L1 + 256 ko L2)
Remarque 1bis : le Pentium 4 possde en fait un chache L1 de 8 ko associ un cahce
de trace dexcution L1 de 12000 opration : on a donc un cache donnes et un cache
instructions distincts. Le cache L2 est de 256 ou 512 ko selon la version.
Remarque 2 : le 486 travaille en 32 bits (interne et externe) et le pentium en 64 bits
interne et 32 bits externe. Pour le Pentium certains constructeur ont conu un bus sur
64 bits pour relier le cache et le contrleur de cache ; dautres ont adapt des solutions
existantes et transfrent les 64 bits en 2 fois 32 bits.
Remarque 3 : le Pentium pose un autre problme : ce circuit est si rapide que le temps
de chargement du cache avec lensemble des donnes prsentes en mmoire vive devient
lui aussi critique. Quelques constructeurs proposent de relier cache et RAM par un bus
22 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
de 128 bits.
Structure gnrale dun cache :
La mmoire cache nest pas adresse comme toutes les mmoires, cest--dire en
faisant correspondre une adresse une cellule mmoire.
Dans un cache sont ranges en mme temps les donnes ainsi que leur adresse (la
cl) correspondante dans la mmoire centrale (ou seulement une partie).
Ce type de mmoire, appel mmoire associative , opre selon deux tapes :
test de prsence dadresse dans la mmoire adresse ;
si oui, mettre la donne sur le bus de donne.
Remarque : la recherche par cl (adresse) dans la mmoire associative ne seffectue pas
de manire squentielle, mais en parallle sur toutes les cases de la mmoire associative.
En un accs, on sait si linstruction cherche se trouve ou non dans lantmmoire.
Structure gnrale dun cache : recherche par clef (cf gure III.7).
Mmoire
adresse
Mmoire
donne
Bus donne
Bus adresse
Mmoire associative
FIG. III.7: Recherche par clef dans une mmoire cache
Structure gnrale dun cache : recherche par adresse (cf gure III.8).
Le contrleur de cache 80385 :
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 23
III.6. Mmoire virtuelle
adresse Information
contenue
cette
adresse
Mmoire normale
(recherche par adresse)
FIG. III.8: Recherche par adresse dans une mmoire centrale
La performance de mmoire cache se mesure laide du taux de succs (nombre dac-
cs fructueux lantmmoire divis par le nombre daccs total lantmmoire). Il
est obtenu exprimentalement et parfois dpasse 90%. Il dpend de la taille de lantm-
moire et de la localit du programme.
III.6 Mmoire virtuelle
Pour permettre lutilisation de programmes volumineux et multi-utilisateurs, on fait
appel un systme de gestion de la mmoire appel mmoire virtuelle .
Elle permet de disposer de plus de mmoire que nen offrent les circuits RAM de
lordinateur, lide tant de sparer les concepts de la mmoire adressable et de la m-
moire (RAM) disponible.
Fonctionnement : les parties de programmes ou de donnes qui excdent la mmoire de
lordinateur sont stockes sur une mmoire de masse (auxiliaire) et sont recharges dans
la RAM quand cela est ncessaire.
Rappel : hirarchie de la mmoire dans un ordi :
registres ;
cache ;
mmoire principale (RAM) ;
mmoire auxiliaire (disque dur).
1) Principe de la mmoire virtuelle
Cela consiste autoriser lexcution dun processus dont la capacit mmoire est
suprieur la RAM disponible.
Le dispositif pour la gestion de la mmoire virtuelle se compose de la RAM et dune
mmoire de masse (exemple : disque).
Exemple : soit un systme 16 lignes dadresse, donc de 64 ko despace adressable, mais
avec seulement 4 ko de mmoire centrale (RAM). Si le programme log dans les 4 ko
24 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
fait appel un processus dont ladresse est hors des 4 ko, alors un dfaut sera dtect. Le
processeur va alors cherche un bloc de programme dans la mmoire auxiliaire et le place
dans la zone disponible de la RAM. ce moment, ladresse dappel ne correspond
toujours aucun programme. Il faut donc par une mthode de table, raliser une translation
des adresses an que ladresse spcie rentre dans le cadre des adresses disponibles
cest--dire les adresses RAM (cf gure III.9).
de 4 k
auxiliaire
principale
Mmoire
Mmoire
FIG. III.9: Principe de la mmoire virtuelle
Remarque : le principe de la mmoire virtuelle peut tre compar au principe de la
mmoire cache.
2) Pagination
La pagination permet la gestion de la mmoire virtuelle. Elle consiste en une frag-
mentation de la mmoire auxiliaire en blocs de dimensions xes appeles pages .
Chaque page est charge en mmoire centrale ds quelle est appele par un processus.
Elle sera alors implante une adresse disponible qui sera rfrence dans une table de
processus (remarque : la mmoire centrale est aussi divise en pages, cf gures III.10 et
III.11).
La gestion de la mmoire virtuelle est ralise par le systme dexploitation qui ex-
cutera les instructions suivantes :
lappel de la page auxiliare ;
son implantation en mmoire principale ;
la mise jour de la table des pages.
Cette mthode de gestion est transparente pour lutilisateur (contrairement au prin-
cipe de la segmentation). Le programmeur peut travailler comme si lensemble de son
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 25
III.6. Mmoire virtuelle
page 0
page 1
page 2
page 15
page 0
page i
page j
page 2
16 pages de 4 k
8 pages de 4 k
Espace adressable
virtuel de 64 k
Mmoire principale
de 32 k
FIG. III.10: Exemple de pagination
programme tait constitu dune adresse linaire.
La mmoire virtuelle et la mmoire cache ont un aspect dynamique : cest sur de-
mande instantane (non planie) que le bloc dinformation est amen dans le niveau
infrieur. La mmoire centrale est comme une mmoire cache vis vis de la mmoire
virtuelle.
3) Segmentation
Dans ce cas la fragmentation de la mmoire est effectue en zones de tailles variables
contenant en gnral des entits homognes (tableaux, piles, programmes ...)
La segmentation est galement gr par une mmoire topologique qui prcise la
localisation des segments, mais aussi leur taille et leur prsence ou non en mmoire
principale.
26 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
1 100
page 0
page 1
page 2
page 15
adresse de la page en mmoire secondaire
1 : la page est en
mmoire physique
0 : elle ny est pas
N de la page relle
dans laquelle cette
page virtuelle est
placee (si elle est en
mmoire principale)
FIG. III.11: Fonctionnement dune mmoire topologique
Table
des
symboles
Seg 0
0
20 k
Texte
source
Seg 1
0
12 k
Arbre
syntaxique
Seg 2
0
16 k
Constante
Seg 3
0
8 k
Pile
Seg 4
0
12 k
FIG. III.12: Exemple de segmentation utilise par un compilateur
Remarque : chaque segment est gr indpendamment des autres.
4) Gestion de la mmoire virtuelle
Nous avons vu que la mmoire virtuelle est gre par lintermdiaire dune mmoire
topologique qui ralise le transcodage.
Il y a un va-et-vient des pages entre la mmoire principale et la mmoire secondaire
durant lexcution dun programme. Si le contenu dune page nest pas modi, il nest
pas ncessaire de la rcrire lorsquelle doit tre retire de la mmoire principale. Dans
le cas contraire, il y a rcriture (et donc ncessit de mmoriser si il y a eu ou pas eu de
modication).
En gnral, un systme utilisant la mmoire virtuelle travaille en multiprogramma-
tion, cest--dire avec plusieurs processus activables. Dans ce cas, chaque processus
correspond une table de transcodage.
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 27
III.7. DMA (Direct memory access)
III.7 DMA (Direct memory access)
Le transfert de donnes entre un priphrique et la mmoire se fait souvent par bloc
de caractres. Chaque transfert de caractre ncessite une intervention du processeur,
donc une perte de temps pour le processeur, mme en mode interruption .
La solution est donc de remplacer le traitement logiciel par un traitement matriel,
en utilisant un circuit spcialis : le contrleur DMA.
I/O CPU Mmoire
HALT HALTA
DMA
FIG. III.13: Principe du DMA
Les contrleurs DMA sont assez coteux. Il existe plusieurs philosophies de DMA;
par exemple, un DMAC
1
peut suspendre le processeur, larrter, voler des cycles m-
moire au processeur, ou encore rallonger les priodes dhorloge.
1) Matriel pour la gestion mmoire
La ralisation des outils de gestion mmoire requiert de nombreux lments mat-
riels. Ceci peut inclure les mmoires associatives, les circuits de transformation dadresse
et les mmoires rapides pour les tables de pages. De tels quipements sont disponibles
dans de nombreux systmes.
Pour les micro-ordinateurs, ce matriel est fourni gnralement sous forme dun cir-
cuit intgr compatible avec le processeur utilis (le chipset). De tels CI acceptent les
adresses logiques du processeur et gnrent les adresses physiques en utilisant leurs
tables internes. Des tables spares peuvent tre fournies pour les espaces utilisateurs
et les espaces systme. Le contenu de ces tables qui peuvent donner des informations
de protection et de droit daccs est charg par le processeur.
La plupart des processeurs 16 et 32 bits disposent de circuits de gestion mmoire.
Remarques gnrales :
1
Direct memory access controller : contrleur daccs direct la mmoire, ou contrleur DMA
28 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
AD0AD15
ALE
Controleur DMA
^
controle
Bus de
^
Bus de
donnes
Mmoire
Priphrique
Latch
Adresse
IOR IOW MEMW MEMR
HOLDA
HOLD
FIG. III.14: Fonctionnement du DMA
La mmoire principale est lun des composants principaux des ordinateurs : leur
taille et leur vitesse xent la capacit des ordinateurs.
La mmoire cache est ralise en technologie bipolaire, alors que la mmoire prin-
cipale en technologie CMOS (cot plus faible).
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 29
III.7. DMA (Direct memory access)
30 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
IV Le processeur
Rle dans lordinateur : interprte et excute les instructions dun programme mmoris
en mmoire centrale.
Il se dcompose en deux grandes entits :
le squenceur : automate excutant de faon rptitive les squences de :
1. recherche dinstruction ;
2. dcodage de linstruction ;
3. excution de linstruction.
le chemin de donnes : lensemble des composants et moyens emprunts par une
information au cours du traitement (registres, mmoire, ALU, bus ...). Le chemin
de donnes est aussi appel la partie oprative.
IV.1 Le squenceur
Le systme apte raliser une succession dvnements an de parvenir un traite-
ment dsir sur une ou plusieurs donnes ou dclencher des actions de commande dun
processus.
Deux problmes se posent lors de llaboration dun systme squentiel :
1. prsentation du systme (pour diter et simuler son fonctionnement) ;
2. ralisation pratique.
Pour la prsentation dun systme squentiel on dispose de plusieurs mthodes :
GRAFCET, labor en 1977 ;
rseaux de Petri, labors en 1970 ;
graphes cartsiens ou organigrammes, labors en 1970.
1) GRAFCET (graphe tape-transition)
Cest une reprsentation dun systme squentiel base sur lalternance tape-
transition : une tape suit une transition et inversement.
1.a) Reprsentation
Chaque tape est reprsente par un carr dans lequel est spci un symbole associ
ltape (en gnral un numro). chaque tape est associe un rectangle pour prciser
laction correspondante.
Remarque : une tape active peut tre repre par un .
La transition franchir est reprsente par un segment plac sur la liaison entre deux
tapes.
Remarque : ct de ce segment on dnit une expression (en gnral logique) qui
reprsente la validit de la transition.
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 31
IV.1. Le squenceur
1 Activer signal E
FIG. IV.1: Reprsentation dune tape
3
4
ab+d
FIG. IV.2: Reprsentation dune transition
Cette transition est appele rceptivit , elle peut tre fonction de :
ltat des variables dentre ;
lvolution de ces variables (front montant ou descendant) ;
lactivit dtapes ;
ltat des variables internes (compteur, horloge).
1.b) Les rgles dvolution rgissant le fonctionnement
Rgle 1 : une tape dinitialisation prcise le dbut du fonctionnement.
0 Conditions initiales
FIG. IV.3: Reprsentation dune condition initiale
Rgle 2 : une transition ne peut tre franchie que lorsque toutes les tapes imm-
diatement prcdentes sont actives et que la rceptivit (la transition) est vraie.
Rgle 3 : le franchissement dune transition entrane lactivation de toutes les
tapes immdiatement suivantes et la dsactivation des tapes immdiatement pr-
cdentes.
Rgle 4 : si au cours du fonctionnement une mme tape doit tre dsactive et
active simultanment, elle reste active.
32 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
4 est valide
si 3 est active
et si G est vrai
3
4
G=ab
FIG. IV.4: Condition de franchissement dune transition
1.c) Les diffrents cas de gures possibles
La gure ci-dessous prsente les diffrents cas de gure de la slection de squence
dun GRAFCET.
les divergences en OU les divergences en ET
ab ab
les convergences en OU les convergences en ET
d c
FIG. IV.5: Les diffrents types de divergences et convergences
1.d) Exemple : systme de transfert de matriaux par chariot
Le systme se compose dune trmie dont lactivation seffectue par un actionneur
T durant le temps ncessaire pour le remplissage dni par le capteur P. Le chariot
peut se dplacer gauche et droite laide des moteurs G et D. Les capteurs f et
d dnissent la localisation du chariot (f : n, d : dbut). Un actionneur V permet de
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 33
IV.1. Le squenceur
verser les matriaux dans le prcipice. Le bouton m ralise la mise en route du systme.
d f
m
FIG. IV.6: Exemple dutilisation du grafcet : tche automatiser
Prsenter cet exemple par un grafcet.
0
1
2
3
4
T.m
p
f.v
p
d
verser
moteur G
moteur D
remplir
v
FIG. IV.7: Exemple dutilisation du grafcet
2) Lorganigramme
Comme le GRAFCET, lorganigramme est une mthode de reprsentation dune
suite squentielle dactions par un graphique symbolique.
34 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
les actions sont dcrites dans un rectangle ;
les suites conditionnelles sont reprsentes par des gures plusieurs sorties (lo-
sange ou hexagone) ;
dautres symboles sont utiliss pour des descriptions de sous-programmes, des
tapes dinitialisation, etc.
Exemple : prsentation de lexemple prcdent par un organigramme.
3) Comparaison entre les deux mthodes
Le GRAFCET permet lactivation de plusieurs branches simultanment, ce que lor-
ganigramme exclus. Un tel mode de fonctionnement demande lcriture de plusieurs
organigrammes synchroniss par des variables secondaires.
IV.2 Ralisation pratique des circuits squentiels dnis par
un GRAFCET ou un organigramme
1) Les squenceurs asynchrones
Un systme volution squentielle se compose dun certian nombre dtapes au
cours desquelles les actions sont stabels, ce qui se traduit par un phnomne de mmoire
(circuits utilisables : bascules D, RS, JK, cf gure IV.8).
Pour respecter les rgles du GRAFCET, une tape (mmoire) est active si la m-
moire prcdente est active et si la rceptivit associe est vraie.
Q S
R
Etape en cours
Etape suivante
Rceptivit
Etape prcdente
FIG. IV.8: Ralisation dun GRAFCET laide de logique asynchrone
La dsactivation dune tape en cours est ralise par lactivation de ltape suivante,
par action sur lentre R.
Exemple :
Les gures IV.9 et IV.10 prsentent un GRAFCET implanter et le schma logique
de son implantation, respectivement.
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 35
IV.2. Ralisation pratique des circuits squentiels dnis par un GRAFCET ou un organigramme
0
1
2 3
4
5
A
C A
B
C
b.d
b.c
b
a
FIG. IV.9: GRAFCET implanter laide dun circuit logique asynchrone
0
bc
2
3
a
1
a b
bd
A A
C
C
B
5
4
FIG. IV.10: Schma lectrique associ au GRAFCET prcdent
36 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
2) Les squenceurs synchrones cbls
il sagit de squenceurs synchrones raliss par le cblage de circuits logiques
voluant de faon synchrone sous la commande dune horloge.
le squenceur tudi prcdemment a une volution asynchrone (une tape est
active ds que les rceptivits sont vraies) : les tapes surviennent de manire
alatoire et un tel circuit est trs sensible aux parasites.
solution : synchroniser chaque bascule sur un front dhorloge : squenceur syn-
chrone.
2.a) Expos de la mthode
Les activation et dsactivation associes devant tre simultanes, on prend la mme
fonction logique pour lactivation des modules o lon va et la dsactivation des modules
que lon quitte.
Exemple :
b
a
n1
n
n+1
K
n1
= X
n1
.a
J
n
= X
n1
.a
K
n
= J
n+1
= X
n
.b
K
n+1
= J
n+2
=
FIG. IV.11: GRAFCET implanter ...
J
K
Q
H
n1
n1
n1
a
n1
X
J
K
H
X
n
n
Q
n
n
b
J
K
Q
H
X
n+1
n+1
n+1
n+1
FIG. IV.12: ... et son implantation laide de logique synchrone
Exercice : crire les expressions des commandes des bascules JKT ralisant le GRAF-
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 37
IV.2. Ralisation pratique des circuits squentiels dnis par un GRAFCET ou un organigramme
CET suivant :
c
c b
3
4
7
ab
c
m
6
b
5 2
d
1
m
0
J
0
= X
6
.m K
0
= J
1
J
1
= X
0
.m K
1
= J
2
+J
5
J
2
= X
1
.a.b K
2
= J
3
= J
8
J
3
= X
2
.c K
3
= J
4
J
4
= X
3
.c K
4
= J
6
J
5
= X
1
.b K
5
= J
6
J
6
= X
4
.X
8
.c.b +X
5
.d K
6
= J
0
J
7
= X
2
.c = J
3
K
7
= J
6
FIG. IV.13: Exemple de GRAFCET
2.b) Ralisation partir des compteurs-dcodeurs
Lorsque le nombre dtapes est petit ( infrieur 4), on peut affecter une bascule
chaque tape (le cblage reste de dimension raisonnable). Si le nombre dtapes aug-
mente (suprieur 8), on limite laccroissement du cblage en utilisant un registre comp-
teur et un dcodeur.
Plusieurs cas de gure traiter :
enchanement dtapes : en faisant compter le compteur, on peut reprsenter 2
n
38 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
2 = 16 sorties (nombre dtages)
4
Compteur (n bascules)
0 1 2 12 13 14 15
entres de chargement
entre du
comptage
FIG. IV.14: Ralisation dun squenceur laide dun compteur
tapes successives, de numro K, K + 1, K + 2,
Par exemple, soit le compteur dans ltat K = 7, seule la sortie 7 du dcodeur
est active, et elle commande les actions raliser durant cette tape. Lorsque
lvolution du squenceur fait passer le compteur dans ltat K + 1 = 8, la sortie
7 est dsactive ainsi que laction de ltape 7, et laction de ltape 8 est active.
tests et sauts dtapes (transitions conditionnelles)
test : le compteur doit patiner tant que la condition nest pas vraie ;
saut : en forant le compteur une valeur comprise entre 0 et 2
n1
, on peut
passer de nimporte quelle tape de numro i une autre de numro j.
4
2
a vrai
N
4
2
a
LOAD
compteur
codage
dcodage
a
entres de
chargement
H
GS
sortie 4
entre 2
FIG. IV.15: GS indique si une entre du codeur est active ou non
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 39
IV.2. Ralisation pratique des circuits squentiels dnis par un GRAFCET ou un organigramme
activation de plusieurs branches : lactivation simultane de plusieurs tats du
compteur est impossible. Or, la traduction dun GRAFCET en organigramme n-
cessite autant dorganigrammes que de branches actives simultanment, synchro-
niss par des variables secondaires : introduction de variable ssecondaires (telle
que start ag, end ag).
N
O
Start Flag
Start Flag
RAZ
SET
End Flag
a
squenceur principal
secondaire
squenceur
End Flag
O
N
End Flag
RAZ
Start Flag
SET
O
N
a
squenceur principal squenceur secondaire
FIG. IV.16: Activation de plusieurs branches laide de deux squenceurs
avec :
R
S
Q
Flag
Start
RAZ
SET
R
S
Q
Flag
RAZ
SET
End
FIG. IV.17: Gnration des signaux Start Flag et End Flag
40 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
2.c) Schma global du squenceru synchrone cbl
2.d) Exemple dun squenceur cbl
Ralisation dun multiplieur 8 bits par 8 bits sign en complment deux. Le rsultat
est donn sous forme de module et signe.
La partie oprative contient des circuits tels que :
des registres universels aussurant le chargement, le dcalage droite et gauche,
commands par 2 bits S1 et S2 ;
S1 S2
0 0 rien
0 1 dcalage droite
1 0 dcalage gauche
1 1 chargement
un registre rsultat de 15 bits pour le module et 1 bit pour le signe, valid sur front ;
une UAL sur 16 bits dont la fonction excuter est code sur 4 bits S
3
, S
2
, S
1
, et
S
0
:
S3 S2 S1 S0
A 0 0 0 0
A+1 1 1 1 1
zro 0 0 1 1
A+B 1 0 0 1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
un compteur de type 74160
PT LOAD
0 1 comptage invalid
X 0 chargement synchrone
1 1 comptage valid
On dispose du circuit de la partie oprative. Il est reprsent sur le schma suivant :
la partie oprative est le circuit sur lequel va tre ralise lopration dsire ;
au dpart, nous supposons que :
OP1 Reg1 (multiplicande)
OP2 Reg3 (multiplicateur)
Deux oprations sont effectuer :
validation du signe du rsultat et transformer les oprandes ngatifs en valeurs
positives (par le complment deux) ;
ensuite, ralisation de la multiplication.
Algorithme 8 bits 8 bits
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 41
IV.2. Ralisation pratique des circuits squentiels dnis par un GRAFCET ou un organigramme
Le multiplicateur est analys bit par bit partir du LSB. Sil baut 1, le multiplicande
est additionn au rsultat puis dcal gauche, sinon, il est seulement dcal gauche.
Exemple :
1 1 0 0 0 1 0 1
0 0 1 1 0 1 0 1
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 rsultat intermdiaire initialis 0
0 0 0 0 0 0 0 0 1 1 0 0 0 1 0 1 bit 0 = 1
0 0 0 0 0 0 0 0 1 1 0 0 0 1 0 1 R0
0 0 0 0 0 0 1 1 0 0 0 1 0 1 bit 2 = 1
0 0 0 0 0 0 1 1 1 1 0 1 1 0 0 1 R2
0 0 0 0 1 1 0 0 0 1 0 1 bit 4 = 1
0 0 0 1 0 0 0 0 0 0 1 0 1 0 0 1 R4
0 0 0 1 1 0 0 0 1 0 1 bit 5 = 1
0 0 1 0 1 0 0 0 1 1 0 0 1 0 0 1 R5 = rsultat nal, n du traitement
Organigramme
Reg1 et Reg2 contiennent OP1 sur deux octets pour permettre laddition des rsultats
intermdiaires sur deux octets.
On remarque que certaines actions sont actives sur des niveaux et dautres sur des
fronts. Pour viter les problmes de synchronisme, une horloge plusieurs phases est uti-
lise (pour cet exemple, deux phases dhorloge sont utilises :
2
est associ LOADR
et
1
active le squenceur).
Aprs la numrotation des tapes, il faut raliser le calcul des actions, le calcul des
validations chargement et comptage, et le calcul des adresses de chargement.
(1) Calcul des actions
RAZ start ag = E17
SET end ag = E17
SIGN = E1
S11 = E16 + E4 + E6 VAL1 = E3 + E5 + E15
S12 = E16 VAL2 = E15
S21 = E16 VAL3 = E8 + E10
S22 = E16 VALR = E4 + E6 + E11 + E9
S31 = E9 + E11 LOADR = E3 + E5 + E8 + E10 + E12 + E15
S32 = E16
Les actions (fonctions) de lALU :
42 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
S3 S2 S1 S0
A 0 0 0 0 E3 + E8
A+1 1 1 1 1 E5 + E10
zro 0 0 1 1 E12
A+B 1 0 0 1 E15
S3 = E5 + E10 + E15
S2 = E5 + E10 +
S1 = E5 + E10 + E12
S0 = E5 + E10 + E12 + E15
(2) Calcul des validations chargement et comptage
Lorganigramme comporte 17 tapes, ce qui nous impose de prendre un compteur de
5 bits au minimum.
Le compteur dont nous disposons possde deux entres LOAD et PT.
Le chargement doit tre valid (soit LOAD=0) chaque fois quil y a un saut dtape.
Calcul du patinage (arrt du comptage) : patinage si PT = E0.start ag
(3) Calcul des adresses de chargement
Dnition des lignes de chargement du compteur A4, A3, A2, A1, A0.
A4 A3 A2 A1 A0
0 0 1 1 1 E2 saut en E7
0 1 1 0 0 E7 saut en E12
1 0 0 0 1 E13 saut en E17
1 0 0 0 0 E14 saut en E16
0 0 0 0 0 E17 saut en E0
A0 = E2 + E13
A1 = E2
A2 = E2 + E17
A3 = E17
A4 = E13 + E14
3) Le squenceur microprogramm (microprogrammation)
Tout circuit squentiel est constitu dun circuit combinatoire reboucl sur lui-mme
travers un autre circuit.
Pour un squenceur cbl, le circuit combinatoire se compose de fonctions logiques
(constitues de circuits cbls) de manire raliser une succession dactions bien d-
termines et inchanges.
On peut raliser le systme de contrle laide de ces techniques classiques, mais
il est de plus en plus frquent doprer lide de la microprogrammation (le logiciel
associ reoit le nom de rmware).
3.a) Constitution dun squenceur microprogramm
comme dans tout systme programm, une mmoire contient la suite squentielle
des oprations effectuer (mmoire de contrle).
si nous regardons les reprsentations dun enchanement squentiel (GRAFCET,
organigramme), nous voyons qu chaque tape stable sont associes des informa-
tions telles que :
numro ou code ou adresse de ltape en cours ;
numro ou code ou adresse de ltape suivante ;
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 43
IV.2. Ralisation pratique des circuits squentiels dnis par un GRAFCET ou un organigramme
typede transition avec ltape suivante : inconditionnelle ou conditionnelle avec
les conditions associes ;
actions associes ltape.
en fait, chaque tape est reprsente par une che dcrivant les informations pr-
cdentes. Lensemble du chier constitue le microprogramme et chaque che une
microinstruction.
Les microinstructions dnissent tous les signaux de contrle pour le chemin de
donnes et ont la possibilit de dcider conditionnellement de linstruction excuter
ltape suivante.
Linvention de la microprogrammation permet de modier le jeu dinstructions en
changeant le contenu de la mmoire de contrle sans modier limplantation matrielle.
Schma de lorganisation du squencement de microinstructions :
3.b) Les composants du squenceur
(1) Circuit de dcodage dadresse
Un dcodeur est utilis pour gnrer ladresse de dbut dune microroutine donne
sur la base du code-oprtion contenu dans le registre dinstruction (IR).
(2) C.A.R.
Le CAR est un circuit apte mmoriser le numro (ladresse, le code) de ltape en
cours.
Il peut tre constitu de deux types de circuits :
un simple registre (ncessite un chargement obligatoire chaque fois) ;
un compteur.
Dans les deux cas, les trois cas de gure suivants devront tre excutables :
suite squentielle
registre : chargement de ladresse suivante ;
compteur : validation du comptage.
patinage
registre : ne pas charger ;
compteur : invalider le compteur.
branchement
registre : chargement de la nouvelle adresse ;
compteur : chargement de la nouvelle adresse.
(3) Mmoire de microprogramme
La mmoire de microprogramme est le circuit qui contient un code qui correspond
une tape donne. En fait, cette mmoire est un circuit combiatoire qui fournit un
ensemble dtats binaires en sortie en fonction dun ensemble dtats en entre (adresse).
Cette logique pourrait tre ralise laide de circuits logiques cbls, mais ceci
serait contraire leffet attendu, cest--dire la souplesse de la programmation.
44 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
Le circuits programmables sont :
les mmoires ;
les PLA.
Lorganisation des champs des microinstructions repose sur deux types :
la microprogrammation horizontale ;
la microprogrammation verticale.
Exemple de taille de la mmoire de microprogrammation : 4K microinstructions
avec 50 80 bits par microinstruction.
La microprogrammation horizontale
Ce type de codage de la microinstruction consiste employer un bit par micro-
commande, cest--dire affecter un bit particulier une action particulire et toujours
la mme. Donc, autant de bits que de bits de commande, ce qui aboutit des instructions
longues. Lintrt est que les actions sont effectues simultanment.
La microprogrammation verticale
On utilise un codage maximal des microcommandes. Seuls deux champs sont pr-
sents simultanment :
un champ dnissant le type du champ complmentaire ;
un champ complmentaire dnissant les microcommandes (concernant les ac-
tions, les adresses et les conditions).
champ complmentaire Type de champ (code opration)
ACTIONS
ADRESSES TYPE
CONDITIONS
En sortie du squenceur, il faut que les microcommandes soient aiguilles vers dif-
frentes fonctions effectuer. Ceci est ralis liade dun multiplexeur command par
le type de champ.
Le squencement est alors dcoup en plusieurs squences de microcommandes et
ceci pose un problme notamment lors de sauts conditionnels.
Lors des sauts conditionnels, il faut simultanment tester les variables externes, selon
ltat recharger ou non une nouvelle adresse dans le CAR et gnrer lordre de charge-
ment. Dans ce cas, il faudra raliser ceci en deux tapes et mmoriser un tat interm-
diaire
Lorganigramme de test se traduit en pratique par le schma ci-dessus. Do le
schma du squenceur microprogramm suivant :
Cette structure ncessite deux phases dhorloge dcales
1
et
2
. La condition de
validation de chargement sera prsente dans la bascule D aprs le calcul de la condition.
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 45
IV.2. Ralisation pratique des circuits squentiels dnis par un GRAFCET ou un organigramme
3.c) Exemple de squenceur
Reprenons lexemple du multiplieur cbl prcdant pour une microprogrammation
verticale.
(1) Organigramme
Il doit tre modi an de crer deux tapes lors de chaque test.
Deux diffrences apparaissent par rapport lorganigramme dun squenceur cbl :
les tests se partagent en deux tapes ;
les sauts inconditionnels gnrent des tapes parts entires.
Donc, si nous dcrivons le squenceur dun point de vue matriel, il nous faudra
raliser un saut conditionnel lorsque la variable secondaire est active.
Dans certains organigrammes, nous voyons que des sauts conditionnels dtapes
sont effectus lorsque les tests sont faux (ex : sup) ou lorsque des tests sont vrais (ex :
start ag).
Comme nous navons quune variable secondaire, il nous faut homogniser les tests
et sauts : soit tous les sauts conditionnels sont valides pour un rsultat VRAI du test, soit
tous les sauts seffectuent lors dun test VRAI ralis entre un bit du sqeunceur et un
tat qui forcera la sortie VRAI de la variable de chargement.
Ce qui donne au niveau du test matriel
(2) Organisation des microinstructions
Pour limiter le nombre de bits, nous travaillons en microprogrammation verticale.
Nous allons donc crer plusieurs types de champs complmentaires :
nous avons 28 tapes (daprs lorganigramme), ce qui ncessite un minimum de
5 bits pour son dcodage ;
lorsque nous analysons lorganigramme, nous nous apercevons que ltape 25 n-
cessite 7 actions simultanes : 4 pour lALU, un chargement de registre (LOADR)
et 2 validations de portes (VAL1, VAL2) ;
nous disposons de deux manires dagir : soit on augmente la taille des bits des
champs complmentaires, soit on dcoupe les tapes en plusieurs tapes et cre
des champs complmentaires diffrents (mais cela nest pas toujours possible, par
exemple lorsque la simultanit est ncessaire comme dans notre problme). Par
contre il existe un moyen en utilisant une mmorisation momentane des actions.
Nous allons associer une microinstruction contenant des actions de validation des
portes, un registre (mmoire) actif sur front
2
, la mme que celle qui active LOADR.
Ainsi lcriture suivante sera valable.
On peut maintenant dnir les diffrents types de microinstructions.
Les modications proposes accroissent le nombre des tapes. Il est ncessaire de
crer un champ complmentaire de 6 bits au minimum.
46 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
Microinstruction de type 1
Dans une microinstruction de type 1, nous allons inclure les 4 bits de fonctions
dALU (S3, S2, S1, S0), le chargement du registre rsultat (LOADR) et lordre de vali-
dation (VALR).
VALR LOADR S3 S2 S1 S0 0 0 1
type
Microinstruction de type 2
On y intgre les autres actions : SIGNF, VAL1, VAL2, VAL3, RAZSF, SETEF,
CLEAR. Nous avons 7 actions pour 6 bits, donc codage simultan de SIGNF, CLEAR,
VAL3.
SEF REF VAL1 VAL2 0 1 0
type
Microinstruction de type 3
On y inclut le reste des actions relatives aux commandes des registres. Nous y avons
six actions (S11, S12, S21, S22, S31, S32) pour 6 bits : il nest donc pas ncessaire de
les coder.
S11 S12 S21 S22 S31 S32 0 1 1
type
Microinstruction de type 4
Dans cette microinstruction de type 4, on dcrit les conditions de test. On dnombre
5 conditions : StartFlag, msbop1, msbop2, zero, lsbop2. Il nest pas besoin de les coder.
SF msbop1 msbop2 zero lsbop2 1 0 0
type
Microinstruction de type 5
Les adresses conditionnelles.
1 0 1
type
Microinstruction de type 6
On y place les adresses incondionnelles.
1 1 0
type
(3) Organigramme modi
Lorganigramme propos plus haut va tre lgrement modi compte-tenu de nou-
veaux regroupements des actions.
(4) Le microprogramme
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 47
IV.2. Ralisation pratique des circuits squentiels dnis par un GRAFCET ou un organigramme
Maintenant que nous avons dcrit la tche effectuer laide dun organigramme,
nous pouvons procder lcriture du microprogramme.
Il nous faut crire une succession de microinstructions composes dun ensemble
de bits disposs selon le codage qui a t dni prcdemment, ce qui est fastidieux et
source derreurs.
Il existe des langages dcriture de microprogrammes quivalents aux langages das-
semblage ou ventuellement aux langages de haut niveau de type interprteur.
Nous allons rester ici, au niveau du langage binaire ardu mais intressant pour la
comprhension du fonctionnement du squenceur.
N tape Champs complmentaires type de champ
0 100000 100
1 000011 101
2 000001 110
3 000010 010
4 010000 100
5 000111 101
6 001111 110
7 001011 010
8 010000 001
9 100000 001
10 100000 011
11 001000 010
12 011111 001
13 100000 001
.
.
.
.
.
.
.
.
.
48 Architecture des systmes microprocesseurs c M. Siadat & C. Diou
BIBLIOGRAPHIE
Bibliographie
[RAM] RAM Shopping Guide, http://www.ramshopping.com/guide.php
c M. Siadat & C. Diou Architecture des systmes microprocesseurs 49
Vous aimerez peut-être aussi
- Corrige 1Document29 pagesCorrige 1Bila100% (1)
- Programmation Des MicrocontroleursDocument108 pagesProgrammation Des MicrocontroleursHors ManPas encore d'évaluation
- Cours Systemes Micro-Programmes Parti1Document43 pagesCours Systemes Micro-Programmes Parti1alkassoum100% (3)
- Microprocesseur 8086Document79 pagesMicroprocesseur 8086Hichem Hamdi100% (3)
- Assembleur 8086Document45 pagesAssembleur 8086jamesamine100% (10)
- Cours Microcontrôleurs-Tres ImportantDocument132 pagesCours Microcontrôleurs-Tres ImportantNabil Dakhli0% (1)
- 04 Microprocesseur 8086Document21 pages04 Microprocesseur 8086Rafik OuchenePas encore d'évaluation
- AssembleurDocument26 pagesAssembleurHedi Yatouji100% (1)
- VhdlexDocument10 pagesVhdlexSoukaina NJPas encore d'évaluation
- Ch4 Stm32 Interface Usart CanDocument31 pagesCh4 Stm32 Interface Usart CanmanelPas encore d'évaluation
- Modelsim QuartusDocument23 pagesModelsim QuartusAli AlFiguiguiPas encore d'évaluation
- Chapitre 5 VHDLDocument91 pagesChapitre 5 VHDLdhdhPas encore d'évaluation
- MicroprocesseurDocument7 pagesMicroprocesseurwalidjoePas encore d'évaluation
- Architecture Des Systèmes À Microprocesseur TP N°2: Timer / Génération de Signal PWMDocument20 pagesArchitecture Des Systèmes À Microprocesseur TP N°2: Timer / Génération de Signal PWMAwatef MessaoudiPas encore d'évaluation
- Microprocesseur 8088 8086Document86 pagesMicroprocesseur 8088 8086Afenspy Pipose100% (3)
- VHDL Travaux2TP20180701ABDEL1Document8 pagesVHDL Travaux2TP20180701ABDEL1Tarek BouazzaPas encore d'évaluation
- TP 4 AssembleurDocument1 pageTP 4 AssembleurMohamed El Mourabit100% (1)
- MicroProcesseur Hicham ELKASMIDocument12 pagesMicroProcesseur Hicham ELKASMIEl Oufir El MehdiPas encore d'évaluation
- Algébre de BooleDocument25 pagesAlgébre de Boolesakre100% (5)
- TD4Document1 pageTD4Mounira Tarhouni100% (1)
- Fascicule de TP FpgaDocument32 pagesFascicule de TP FpgaHichem HamdiPas encore d'évaluation
- Assembleur x86Document96 pagesAssembleur x86Ibtihel MechleouiPas encore d'évaluation
- Initiation Au Langage Assembleur x86Document14 pagesInitiation Au Langage Assembleur x86electroblida100% (3)
- Travaux Dirigés FPGA & VHDLDocument28 pagesTravaux Dirigés FPGA & VHDLR.s. Félix75% (4)
- Processeurs Embarques 1ppDocument66 pagesProcesseurs Embarques 1ppAhle Assenna0% (1)
- 1-TP Microprocesseur PDFDocument5 pages1-TP Microprocesseur PDFAmin DAHMANI100% (1)
- TP Sin 2018 2017 PDFDocument21 pagesTP Sin 2018 2017 PDFyapPas encore d'évaluation
- Les MemoiresDocument45 pagesLes MemoiresWalter FopaPas encore d'évaluation
- TD 2021Document4 pagesTD 2021elhaoudar.nassima100% (1)
- Fiche de Travaux Diriges PDFDocument6 pagesFiche de Travaux Diriges PDFGoran Person DongmoPas encore d'évaluation
- Formation Interface Communication 1Document19 pagesFormation Interface Communication 1اشر اقPas encore d'évaluation
- Corrigé TD 154Document3 pagesCorrigé TD 154MBADJOUN Daniel100% (1)
- Carte Numerique QuartusDocument26 pagesCarte Numerique QuartusAdiouma DiopPas encore d'évaluation
- VhdlexDocument10 pagesVhdlexRiyadh Ben AbdallahPas encore d'évaluation
- Examens Microprocesseur-Microcontrolleur PDFDocument48 pagesExamens Microprocesseur-Microcontrolleur PDFMeryem Berr100% (1)
- CoursmicroreduitDocument87 pagesCoursmicroreduitapi-3826166100% (2)
- TPDocument24 pagesTPAlassane Diouf100% (3)
- COURS ET TRAVAUX PRATIQUES de MICROPROCESSEURDocument151 pagesCOURS ET TRAVAUX PRATIQUES de MICROPROCESSEURهشام درياس100% (10)
- Série TD Guide D OndesDocument2 pagesSérie TD Guide D OndesAmine FaidPas encore d'évaluation
- Cours VHDLDocument62 pagesCours VHDLBrice Albin Fotso GhomdimPas encore d'évaluation
- E X Memoire2Document3 pagesE X Memoire2حميد خلفاوي100% (1)
- Microprocesseur 8086Document21 pagesMicroprocesseur 8086Terry Fian82% (11)
- MAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsD'EverandMAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsPas encore d'évaluation
- Systemexpolt 23decokDocument72 pagesSystemexpolt 23decokbenjamin giniPas encore d'évaluation
- Cours Microcontrôleur Microprocesseur 32Document37 pagesCours Microcontrôleur Microprocesseur 32Frank EffeuzePas encore d'évaluation
- Chapitre 3 PDFDocument7 pagesChapitre 3 PDFAhmed AndolsiPas encore d'évaluation
- Chapitre1 Microprocesseurs Et MicrocontroleursDocument14 pagesChapitre1 Microprocesseurs Et Microcontroleursmanale bouderbalaPas encore d'évaluation
- TDu CDocument49 pagesTDu CnawzatPas encore d'évaluation
- PIC LeçonN°0Document7 pagesPIC LeçonN°0Smart ClassePas encore d'évaluation
- Arduino 1Document18 pagesArduino 1ethancadinotPas encore d'évaluation
- Cours Emi Micro 2020 (Microp CHP 1,2,3)Document15 pagesCours Emi Micro 2020 (Microp CHP 1,2,3)Youssef El AjraouiPas encore d'évaluation
- Chap. III: Automate Programmable Industriel (API) : AutomatismeDocument27 pagesChap. III: Automate Programmable Industriel (API) : Automatismeimane elmamoune100% (1)
- DSP Fpga-1Document43 pagesDSP Fpga-1Chochoo BoumzdPas encore d'évaluation
- Chapitre 2 Programmation Des APIDocument26 pagesChapitre 2 Programmation Des APIelhattab hamzaPas encore d'évaluation
- Cours 8051 v0 Eai LP Covid 20 21Document38 pagesCours 8051 v0 Eai LP Covid 20 21abdelhadi elkhyatPas encore d'évaluation
- DSP FpgaDocument43 pagesDSP Fpgachiheb clubistePas encore d'évaluation
- TP3: Conception Schématique Des Microprocesseurs: ObjectifDocument6 pagesTP3: Conception Schématique Des Microprocesseurs: ObjectifDor SafPas encore d'évaluation
- API - Chapter 2Document10 pagesAPI - Chapter 2Meriem SaadPas encore d'évaluation
- 03 Architecture Des OrdinateursDocument11 pages03 Architecture Des OrdinateursRafik OuchenePas encore d'évaluation
- Manuel FRKeylogger USBDocument4 pagesManuel FRKeylogger USBjimmy59Pas encore d'évaluation
- AcomaxDocument1 pageAcomaxLaurentPas encore d'évaluation
- TI-83 Plus - FRDocument527 pagesTI-83 Plus - FRafiqjenobaPas encore d'évaluation
- Architecture Des OrdinateursDocument56 pagesArchitecture Des Ordinateursossama100% (13)
- Polycope SFSD Prof - HIDOUCIDocument79 pagesPolycope SFSD Prof - HIDOUCIZITOUNI RANIAPas encore d'évaluation
- TSX MicroDocument185 pagesTSX MicroSaad YounsiPas encore d'évaluation
- 3eme ScientifiqueDocument191 pages3eme ScientifiqueamnainfoPas encore d'évaluation
- Modicon TSX Micro Bases Automates 43050-FRDocument14 pagesModicon TSX Micro Bases Automates 43050-FRKassoum SawadogoPas encore d'évaluation
- L'Architecture D'u Routeur Et Les Commandes IOSDocument23 pagesL'Architecture D'u Routeur Et Les Commandes IOSomar ouhguaPas encore d'évaluation
- Route UrsDocument270 pagesRoute Urszao1020004497Pas encore d'évaluation
- Cours Sur Le BIOSDocument3 pagesCours Sur Le BIOSHabib FayePas encore d'évaluation
- Livre Architecture AutomobileDocument35 pagesLivre Architecture AutomobileTafa ThiamPas encore d'évaluation
- MagélisDocument89 pagesMagélisCamille AquilonPas encore d'évaluation
- TDC ExadataDocument195 pagesTDC ExadataARIZKIPas encore d'évaluation
- 888 Catalogue 2011 Modicom m340Document267 pages888 Catalogue 2011 Modicom m340ChihebJmaa100% (1)
- Circuits ProgrammablesDocument7 pagesCircuits ProgrammablesSaif GuesmiPas encore d'évaluation
- Cisco - 01 - Introduction Aux Swicth Et RouteursDocument12 pagesCisco - 01 - Introduction Aux Swicth Et RouteursAbderrahman ZianiPas encore d'évaluation