Vous aimerez peut-être aussi
- Cours Des Moteurs AsynchronesDocument40 pagesCours Des Moteurs AsynchronesBALLOUK Soufiane100% (5)
- PP - Endurance Vitesse ForceDocument13 pagesPP - Endurance Vitesse ForcewiggaPas encore d'évaluation
- Máquinas de InducciónDocument52 pagesMáquinas de InducciónCésar AguilarPas encore d'évaluation
- 13 Le Phénomène D'induction ÉlectromagnétiqueDocument25 pages13 Le Phénomène D'induction ÉlectromagnétiquemouadPas encore d'évaluation
- Examen de p3Document26 pagesExamen de p3zakaria ziko ZPas encore d'évaluation
- Calfeut Des Joints Dans Le Batiment PDFDocument18 pagesCalfeut Des Joints Dans Le Batiment PDFDjihad IrdanPas encore d'évaluation
- Cours D'electricite de A-ZDocument23 pagesCours D'electricite de A-ZifrassenPas encore d'évaluation
- Copie de Chap 2 C Corps Humain Et ÉlectrisationDocument2 pagesCopie de Chap 2 C Corps Humain Et Électrisationhe1960Pas encore d'évaluation
- Chapitre 5 - EtudiantDocument40 pagesChapitre 5 - EtudiantTamani AdelPas encore d'évaluation
- Tests de Diagnostic Et Surveillance Des Transformateurs de PuissanceDocument40 pagesTests de Diagnostic Et Surveillance Des Transformateurs de PuissanceadamPas encore d'évaluation
- C TD S01Document9 pagesC TD S01Omar KhayyamPas encore d'évaluation
- VF 20mac 20puarsa 20ASK16T - F ZETADYN 202DF 2SYDocument107 pagesVF 20mac 20puarsa 20ASK16T - F ZETADYN 202DF 2SYWillian SandovalPas encore d'évaluation
- M08 - Réparation de Moteurs Monophasés GE-REEDocument94 pagesM08 - Réparation de Moteurs Monophasés GE-REEKesraoui HichemPas encore d'évaluation
- Mon Rapport1Document36 pagesMon Rapport1rocceli nzoulouPas encore d'évaluation
- Circuits Analogiques - Cours PDFDocument158 pagesCircuits Analogiques - Cours PDFBilaPas encore d'évaluation
- TP EttDocument5 pagesTP EttAbderrahmane DhamenePas encore d'évaluation
- Cours II, 1Document5 pagesCours II, 1Nab IlPas encore d'évaluation
- TP 3Document11 pagesTP 3Mohammed HadbiPas encore d'évaluation
- Cours HacheursDocument90 pagesCours HacheursBouchakour SalimPas encore d'évaluation
- Introduction GénéraleDocument5 pagesIntroduction GénéraleabdouPas encore d'évaluation
- ELT12 Systèmes Mono - 20-21 - TD CorrectionDocument7 pagesELT12 Systèmes Mono - 20-21 - TD CorrectionSALAH RABHI100% (2)
- BM CourseDocument9 pagesBM CourseMarina GincuPas encore d'évaluation
- Dynamique Et CinématiqueDocument40 pagesDynamique Et CinématiqueBen FahPas encore d'évaluation
- TD PHYSIQUE Congé TleDDocument3 pagesTD PHYSIQUE Congé TleDJosselin TuetouomPas encore d'évaluation
- Travail Et Puissance MecaniqueDocument5 pagesTravail Et Puissance MecaniqueAnge JudiPas encore d'évaluation
- Étude Et Simulation Des OPFETs À Base de GaAsDocument77 pagesÉtude Et Simulation Des OPFETs À Base de GaAsWasal NefesPas encore d'évaluation
- Présentation 1Document15 pagesPrésentation 1Moundir Bachir ElezaarPas encore d'évaluation
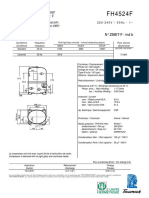
- FH 4524F PDFDocument2 pagesFH 4524F PDFTareqPas encore d'évaluation
- Harec 03 1Document91 pagesHarec 03 1Theo WanPas encore d'évaluation