Vous aimerez peut-être aussi
- Niveau 11 - Alimente Ton Vocabulaire - Les Vêtements - Italien 2 - MemriseDocument3 pagesNiveau 11 - Alimente Ton Vocabulaire - Les Vêtements - Italien 2 - MemriseKeddrick ReynoldsPas encore d'évaluation
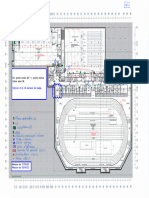
- ELE.01_2104_Plan de principe Contrôle d'Accès- Niveau R-1 - Zone SUDDocument1 pageELE.01_2104_Plan de principe Contrôle d'Accès- Niveau R-1 - Zone SUDKeddrick ReynoldsPas encore d'évaluation
- Plan annoté maj controle d'accès (FTM)Document5 pagesPlan annoté maj controle d'accès (FTM)Keddrick ReynoldsPas encore d'évaluation
- Most-Coulombe 1re AnneeDocument406 pagesMost-Coulombe 1re AnneeFlav MPas encore d'évaluation
- i23003 Pro 0.0 Cfa Ct 016 Cfa Cctp Courants Faibles 0Document64 pagesi23003 Pro 0.0 Cfa Ct 016 Cfa Cctp Courants Faibles 0Keddrick ReynoldsPas encore d'évaluation
- Gba PDFDocument367 pagesGba PDFKechaouPas encore d'évaluation
- Niveau 12 - Acheter Des Provisions - Italien 2 - MemriseDocument3 pagesNiveau 12 - Acheter Des Provisions - Italien 2 - MemriseKeddrick ReynoldsPas encore d'évaluation
- Fic 00007Document11 pagesFic 00007C SôHåĭb SøHåĭb100% (1)
- Fic 00001Document13 pagesFic 00001nephtaliealcineus111Pas encore d'évaluation
- 19-Pro Groupe ElectrogeneDocument25 pages19-Pro Groupe ElectrogeneKeddrick ReynoldsPas encore d'évaluation
- CATALOGUE SCHNEIDER ELECTRIC DISTRIBUTION ELECTRIQUE FRA Complements Techniques 2016 2017 Maj Fevrier 2018 24Mb PDFDocument650 pagesCATALOGUE SCHNEIDER ELECTRIC DISTRIBUTION ELECTRIQUE FRA Complements Techniques 2016 2017 Maj Fevrier 2018 24Mb PDFYacine Meziani67% (3)
- Gba PDFDocument367 pagesGba PDFKechaouPas encore d'évaluation
- Livraison Et Transformation HTA/BT: Page G2Document53 pagesLivraison Et Transformation HTA/BT: Page G2Keddrick ReynoldsPas encore d'évaluation
- ct148 PDFDocument25 pagesct148 PDFSara AdnanPas encore d'évaluation
- Guide Install Groupe ElectrDocument11 pagesGuide Install Groupe ElectrromeoPas encore d'évaluation
- Manuel Général Et de Sécurité PDFDocument114 pagesManuel Général Et de Sécurité PDFMehdi Walker100% (1)
- Securite Groupe ElectrogeneDocument6 pagesSecurite Groupe ElectrogeneABELWALIDPas encore d'évaluation
- Branchement Tarif JauneDocument1 pageBranchement Tarif JauneKeddrick ReynoldsPas encore d'évaluation
- TOP QUIZ Des Galeres AutoCAD Probleme Question SolutionDocument28 pagesTOP QUIZ Des Galeres AutoCAD Probleme Question SolutionKeddrick ReynoldsPas encore d'évaluation
- PolyMecanique PDFDocument197 pagesPolyMecanique PDFBordeauxMeknesAlamesPas encore d'évaluation
- A Dessin TechniqueDocument38 pagesA Dessin Techniqueyassine22Pas encore d'évaluation
- plafonnageNBi2FR07 Hdefforweb3 PDFDocument96 pagesplafonnageNBi2FR07 Hdefforweb3 PDFToto HamimidPas encore d'évaluation
- GIE A Regles Generales de Conception D Une Installation ElectriqueDocument24 pagesGIE A Regles Generales de Conception D Une Installation Electriquedexim1958100% (1)
- Mecanique GeneraleDocument203 pagesMecanique Generalemanel_drPas encore d'évaluation
- Disjoncteurs de Branchement Pour Installation Tarif Bleu - Elfa+ - GE Energy SolutionsDocument5 pagesDisjoncteurs de Branchement Pour Installation Tarif Bleu - Elfa+ - GE Energy SolutionsKeddrick ReynoldsPas encore d'évaluation
- Cours 1Â - Â Introduction Au Langage VHDLDocument1 pageCours 1Â - Â Introduction Au Langage VHDLKeddrick ReynoldsPas encore d'évaluation
- Asynchronous Motors FRDocument17 pagesAsynchronous Motors FRAzou ThtPas encore d'évaluation
- Formation - PDF - Microcontrà Leurs - Microprocesseurs PDFDocument11 pagesFormation - PDF - Microcontrà Leurs - Microprocesseurs PDFKeddrick ReynoldsPas encore d'évaluation
- Formation Programmation Arduino Cours 4 PDFDocument58 pagesFormation Programmation Arduino Cours 4 PDFKeddrick Reynolds100% (1)
- ArduinoDocument44 pagesArduinoAli Abdmouleh100% (1)
- Etude Du GPRSDocument99 pagesEtude Du GPRSWari Scottland100% (2)
- Routage InformationsDocument46 pagesRoutage InformationssaidaggounPas encore d'évaluation
- Plan D'équipement FINAL Assistant Multimédia Et DéveloppeurDocument12 pagesPlan D'équipement FINAL Assistant Multimédia Et Développeurلخضر أحمد ذواديPas encore d'évaluation
- Fra TELE-satellite 1007Document132 pagesFra TELE-satellite 1007telesatellitefrenchPas encore d'évaluation
- coursUML PDFDocument232 pagescoursUML PDFsigmaPas encore d'évaluation
- Guide Pratique D'internet Pour Nouveaux InternautesDocument33 pagesGuide Pratique D'internet Pour Nouveaux InternautesMustapha FagrouchPas encore d'évaluation
- QCM Eln Num 09Document6 pagesQCM Eln Num 09Hfgjj100% (1)
- Dim IE8-0063 Rev 1.0 PDFDocument306 pagesDim IE8-0063 Rev 1.0 PDFhaddagPas encore d'évaluation
- 1432037619Document23 pages1432037619Youssef GouaimaPas encore d'évaluation
- Ofs-200 v4.60 French Fev08 Pn7ofsman1106Document214 pagesOfs-200 v4.60 French Fev08 Pn7ofsman1106babisoPas encore d'évaluation
- QCMDocument7 pagesQCMpartiraretirapasPas encore d'évaluation
- x-s10 Manual FR S FDocument354 pagesx-s10 Manual FR S FjjbelgiumPas encore d'évaluation
- Tutoriel IP Cam Fostcam Tike Securite 2Document18 pagesTutoriel IP Cam Fostcam Tike Securite 2GERAUDPas encore d'évaluation
- Info2 PDFDocument3 pagesInfo2 PDFCFPas encore d'évaluation
- Configuration Sécurisée D'un Contrôleur de Domaine Pour Une Gestion Centralisée Des Utilisateurs Au Sein D'une Entreprise Cas Tchin-LaitDocument71 pagesConfiguration Sécurisée D'un Contrôleur de Domaine Pour Une Gestion Centralisée Des Utilisateurs Au Sein D'une Entreprise Cas Tchin-LaitValère IpséitéPas encore d'évaluation
- TP ProcessusDocument6 pagesTP ProcessusMGPas encore d'évaluation
- Cisco PACKET TRACER - Prise en Main Du Logiciel PDFDocument10 pagesCisco PACKET TRACER - Prise en Main Du Logiciel PDFMamadou lamine SADIOPas encore d'évaluation
- Kontakt 5 Player Getting Started FrenchDocument45 pagesKontakt 5 Player Getting Started Frenchdomenor7Pas encore d'évaluation
- Moodle 70Document6 pagesMoodle 70Hamid TebbanePas encore d'évaluation
- DHCP SupinfoDocument5 pagesDHCP SupinfoT SPas encore d'évaluation
- Document T IDocument293 pagesDocument T IMohamed TarsafiPas encore d'évaluation
- Les Reseaux CiscoDocument21 pagesLes Reseaux CiscoisimgPas encore d'évaluation
- 1tronconneuse AutomatiqueDocument40 pages1tronconneuse Automatique2ste3100% (1)
- Evolution Des Reseau GSM (Thèse)Document168 pagesEvolution Des Reseau GSM (Thèse)Mathieu Bollé100% (1)
- Cours GSM Bsic BCCHDocument45 pagesCours GSM Bsic BCCHvipodessaPas encore d'évaluation
- Chapter PDFDocument27 pagesChapter PDFFaten AbdPas encore d'évaluation
- (Dell Latitude 5480, BTX 210-AKCF 3 Yr Pro Support) - Dhimant - K...Document2 pages(Dell Latitude 5480, BTX 210-AKCF 3 Yr Pro Support) - Dhimant - K...gabbu_Pas encore d'évaluation
- Pdfsammerge 161005214942Document84 pagesPdfsammerge 161005214942Nourdine NASSERPas encore d'évaluation
- Comment Ouvrir Un Document PDF Avec Windows 7Document2 pagesComment Ouvrir Un Document PDF Avec Windows 7AlishaPas encore d'évaluation