Vous aimerez peut-être aussi
- Didacticiel de 1134Document55 pagesDidacticiel de 1134mauricetappaPas encore d'évaluation
- Devoir de Contrôle N°2 - Sciences Physiques - Bac Sciences Exp (2020-2021) MR Handoura NaceurDocument5 pagesDevoir de Contrôle N°2 - Sciences Physiques - Bac Sciences Exp (2020-2021) MR Handoura NaceurchihebPas encore d'évaluation
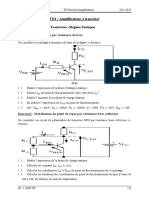
- TD1: Amplifications À Transistor I. Polarisation de Transistors (Régime Statique)Document3 pagesTD1: Amplifications À Transistor I. Polarisation de Transistors (Régime Statique)Seydina Ndiaye100% (1)
- MicrocontrôleursDocument16 pagesMicrocontrôleursMouhcine Ben MoussaPas encore d'évaluation
- Equipement, Liste Materiel Et Reglette A Bornes CCN 001408.10.de - dp.02585Document5 pagesEquipement, Liste Materiel Et Reglette A Bornes CCN 001408.10.de - dp.02585kamilawehbePas encore d'évaluation
- Preparation Cours Du Soir 2bac PC Biof Exo RLC RL RC 25-06-2020Document5 pagesPreparation Cours Du Soir 2bac PC Biof Exo RLC RL RC 25-06-2020thailand.blanePas encore d'évaluation
- Exercice D'application 2 Modulation D'amplitudeDocument1 pageExercice D'application 2 Modulation D'amplitudeHk HjPas encore d'évaluation
- Formulaire D ElectrotechniqueDocument4 pagesFormulaire D ElectrotechniquechoukriPas encore d'évaluation
- 09 - S - Régional - PC - Souss - Massa - 2022 (WWW - Pc1.ma)Document4 pages09 - S - Régional - PC - Souss - Massa - 2022 (WWW - Pc1.ma)jaoudsPas encore d'évaluation
- TP3 ElectroDocument5 pagesTP3 ElectroSimo Kbiri AlaouiPas encore d'évaluation
- Les Pertes Des TransfoDocument5 pagesLes Pertes Des TransfoOussama Mohammad MessadiPas encore d'évaluation
- TD 9 Chaîne de Séchage Peinture - UF3-M3Document7 pagesTD 9 Chaîne de Séchage Peinture - UF3-M3hamzaPas encore d'évaluation
- 970 Bts Crsa E52 2013 PDFDocument31 pages970 Bts Crsa E52 2013 PDFtagne simo rodriguePas encore d'évaluation
- M - 04 - Analyse de Circuits À Courant ContinuDocument51 pagesM - 04 - Analyse de Circuits À Courant Continualmis100% (2)
- TP #1: Synthèse Des Circuits Intégrés: Présentation D'un Système EmbarquéDocument2 pagesTP #1: Synthèse Des Circuits Intégrés: Présentation D'un Système EmbarquéAziz SaijiPas encore d'évaluation
- Devoir de Synthese 3-GEDocument4 pagesDevoir de Synthese 3-GEBouabdellaoui saif ennasrPas encore d'évaluation
- Manuel Caneco BT Nouveautés V5.4-FraDocument48 pagesManuel Caneco BT Nouveautés V5.4-FraYDDFPPas encore d'évaluation
- CHAPITRE I Electronique Fondamentale 1 PDFDocument15 pagesCHAPITRE I Electronique Fondamentale 1 PDFBoudjema SoudedPas encore d'évaluation
- Circuits SequentielsDocument61 pagesCircuits SequentielsDjouweinannodji YvesPas encore d'évaluation
- Un ModemDocument2 pagesUn ModemNadia KefifPas encore d'évaluation
- S8140DDocument4 pagesS8140DmanessePas encore d'évaluation
- 03 Force PlaceDocument8 pages03 Force PlaceZzen NaxcPas encore d'évaluation
- STR-1.1.IntroSTR 2Document25 pagesSTR-1.1.IntroSTR 2TiMo ĦãMźàPas encore d'évaluation
- Classeur 1Document8 pagesClasseur 1Brahim BouifouloussenPas encore d'évaluation
- MOTORTECH Indicateur Tension EN-FRDocument4 pagesMOTORTECH Indicateur Tension EN-FRdrevetph6233Pas encore d'évaluation
- Initiation 1 TIA Portal MS1 PDFDocument46 pagesInitiation 1 TIA Portal MS1 PDFAnonymous KI2Dwk21dn100% (1)
- Induction Magnétique 2Document8 pagesInduction Magnétique 2Ben ZeilanPas encore d'évaluation
- Exposé FinalDocument38 pagesExposé Finalchiabsassiyahoofr100% (2)
- TD - Capteurs - MMSS 2017 2018 Série1Document2 pagesTD - Capteurs - MMSS 2017 2018 Série1Abdelkarim RamPas encore d'évaluation
- 2663 - 83 - 01 - Manual UCM - FRDocument23 pages2663 - 83 - 01 - Manual UCM - FRAurélien DRICOTPas encore d'évaluation