Vous aimerez peut-être aussi
- 2 ASDevoir de Controle N3 Sollicitation 2012Document2 pages2 ASDevoir de Controle N3 Sollicitation 2012mohsenPas encore d'évaluation
- Chapitre 2 Torseur de CohesionDocument8 pagesChapitre 2 Torseur de CohesionExode Christ GuiellePas encore d'évaluation
- 250 Doc Ewyqf 16Document8 pages250 Doc Ewyqf 16Ziyad AkchouchPas encore d'évaluation
- Dosimetre 035pDocument35 pagesDosimetre 035pAttifPas encore d'évaluation
- Cours Action Mécanique Force 2013 2014 (Sdiri Anis)Document4 pagesCours Action Mécanique Force 2013 2014 (Sdiri Anis)Nas MastourPas encore d'évaluation
- Auto NettoyantDocument30 pagesAuto NettoyantsalamPas encore d'évaluation
- Chapitre 1 - Les - Capteurs - Partie - 3Document23 pagesChapitre 1 - Les - Capteurs - Partie - 3Abdelhadi AZPas encore d'évaluation
- Cours RDM Ch1 2 3 4 EnvoiDocument55 pagesCours RDM Ch1 2 3 4 EnvoiNOUREDDINE NEMLIPas encore d'évaluation
- 04 I Oscillateur Harmonique Libre A Un Degre de LiberteDocument6 pages04 I Oscillateur Harmonique Libre A Un Degre de LiberteRaphaël SimoninPas encore d'évaluation
- 03a-Enfriador Por Aire R223-1151Document8 pages03a-Enfriador Por Aire R223-1151Carlos Rangel WiezelPas encore d'évaluation
- Examen National Maths Sciences Maths A Et B 2023 NormaleDocument6 pagesExamen National Maths Sciences Maths A Et B 2023 Normalehetlradof75% (4)
- Chapitre I - Partie 1Document35 pagesChapitre I - Partie 1Bor HanPas encore d'évaluation
- Cours PlaquesDocument37 pagesCours PlaquesNIAMPAPas encore d'évaluation
- DTU 22 Memento Murs - Extérieurs - PréfabriquésDocument109 pagesDTU 22 Memento Murs - Extérieurs - PréfabriquésAdvance GCPas encore d'évaluation
- 032 PERFO 430 Horizon Fra PDFDocument71 pages032 PERFO 430 Horizon Fra PDFDaniel MurhabaziPas encore d'évaluation
- FR Uniaxial PDFDocument1 pageFR Uniaxial PDFIshak GoudjilPas encore d'évaluation
- Dev Meca-AnalytiqueDocument2 pagesDev Meca-AnalytiqueAndré Le Doux NOKOUANGPas encore d'évaluation
- Composantes Du Sujet: RS2021: دادعإ El-Ouarzazi Mohamed N°: MAB3Document4 pagesComposantes Du Sujet: RS2021: دادعإ El-Ouarzazi Mohamed N°: MAB3Nouhaila ChairPas encore d'évaluation
- Traitement de ProcédésDocument58 pagesTraitement de ProcédésIlyes Benslimane100% (1)
- Consignes 1er Cycle 2020 PDFDocument4 pagesConsignes 1er Cycle 2020 PDFJokeR 4RPas encore d'évaluation
- Compte Rendu TP2 Pendule Simple-ConvertiDocument6 pagesCompte Rendu TP2 Pendule Simple-ConvertiHassen Azteca78% (9)
- Check List de ControleDocument46 pagesCheck List de ControleMoulay m'hammed LOUKILIPas encore d'évaluation
- Physique Chimie 2BAC: Tome 1Document84 pagesPhysique Chimie 2BAC: Tome 1lahcen ess100% (1)
- Bielle de Mini CompresseurDocument4 pagesBielle de Mini Compresseurali BourenanePas encore d'évaluation
- Fiche Le Courant Électrique Continu''Document5 pagesFiche Le Courant Électrique Continu''SoukainaPas encore d'évaluation
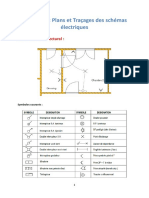
- Cour 3 Plans Et Traçages Des Schémas ElectriquesDocument15 pagesCour 3 Plans Et Traçages Des Schémas Electriquestoti100% (1)
- Applications Des Courant de Foucault À La Vie QuotidienneDocument3 pagesApplications Des Courant de Foucault À La Vie QuotidienneLyes TAGGUEB100% (1)
- CHAPITRE 1 - Définitions Et Théorie Générale Des TurbomachinesDocument22 pagesCHAPITRE 1 - Définitions Et Théorie Générale Des TurbomachinesJAMILA CIPas encore d'évaluation
- Formulaire-De-Physique-Thermodynamique by ExoSup PDFDocument3 pagesFormulaire-De-Physique-Thermodynamique by ExoSup PDFNarjiss Shimi67% (3)
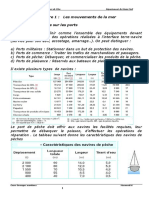
- Chap 1 Cours OM Les Mouvements de La MerDocument5 pagesChap 1 Cours OM Les Mouvements de La MerRAHMA ABDELLIPas encore d'évaluation
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Je me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?D'EverandJe me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?Évaluation : 4 sur 5 étoiles4/5 (1)
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- le Phoenix de nos âmes: Les lois énergétiques de la lumière divineD'Everandle Phoenix de nos âmes: Les lois énergétiques de la lumière divinePas encore d'évaluation
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)