Vous aimerez peut-être aussi
- Utilisation Catia Brep FRDocument4 pagesUtilisation Catia Brep FRBen FahPas encore d'évaluation
- RATIONALISMEDocument5 pagesRATIONALISMEreineesther941Pas encore d'évaluation
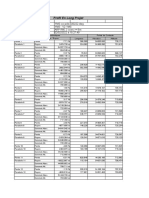
- 2-Profil en LongDocument30 pages2-Profil en LongfrancoPas encore d'évaluation
- 2015 td2 PDFDocument4 pages2015 td2 PDFأيمن أيمنPas encore d'évaluation
- Corail Catalogue Général 2021 PDFDocument325 pagesCorail Catalogue Général 2021 PDFBla BlePas encore d'évaluation
- TD Microcontroleur 2Document25 pagesTD Microcontroleur 2Ismael GhaziPas encore d'évaluation
- Amdec: AMDEC: Analyse Des Modes de Défaillances, deDocument13 pagesAmdec: AMDEC: Analyse Des Modes de Défaillances, deRim BdidaPas encore d'évaluation
- DG 9 FrenchDocument206 pagesDG 9 Frenchibnmessaoud10100% (1)
- Exercices Corriges Suites ReellesDocument28 pagesExercices Corriges Suites ReellesMCHICHI ALAMIPas encore d'évaluation
- Cours RC2 Séance N°2 (RIP)Document38 pagesCours RC2 Séance N°2 (RIP)Fatima MouroPas encore d'évaluation
- MLCCPLMXDocument17 pagesMLCCPLMXBra. DekPas encore d'évaluation
- Corrections Des Exercices Du TP N°1: Infos Système Uname - ADocument14 pagesCorrections Des Exercices Du TP N°1: Infos Système Uname - AradouanePas encore d'évaluation
- Formalisation Et Résolution Des Problèmes de Découpes LinéairesDocument19 pagesFormalisation Et Résolution Des Problèmes de Découpes LinéairesxavierPas encore d'évaluation
- 50 Exercices Corrigés Sur Les Ossatures (RDM) Par Yves DEBARDDocument87 pages50 Exercices Corrigés Sur Les Ossatures (RDM) Par Yves DEBARDMohamed Ait KaddourPas encore d'évaluation
- Théorème de Moivre-LaplaceDocument12 pagesThéorème de Moivre-LaplaceIMARPas encore d'évaluation
- Capture D'écran . 2021-07-01 À 16.00.17Document10 pagesCapture D'écran . 2021-07-01 À 16.00.17Souhail BenbrahimPas encore d'évaluation
- EG4 - Correction de L'analyse Financière 2018Document3 pagesEG4 - Correction de L'analyse Financière 2018mohamed mekaouiPas encore d'évaluation
- Pfe Meryem SlimaniDocument78 pagesPfe Meryem SlimaniMed MohamedPas encore d'évaluation
- Une Presentation de La MEFDocument562 pagesUne Presentation de La MEFyeuminh100% (1)
- Bases Linux S22Document12 pagesBases Linux S22Yan MEKUEKOPas encore d'évaluation
- Ingenierie FinanciereDocument130 pagesIngenierie FinanciereRakl LoPas encore d'évaluation
- La Programmation Linéaire EXERCICES CORRIGESDocument32 pagesLa Programmation Linéaire EXERCICES CORRIGESahlem100% (2)
- Vest 52137653Document29 pagesVest 52137653AINA ANDRIAMAHENIKAJATSIALONINAPas encore d'évaluation
- Axe-FX-II Manual FRDocument211 pagesAxe-FX-II Manual FRFouquetPas encore d'évaluation
- Structures Statistiques Et EstimationDocument107 pagesStructures Statistiques Et EstimationanasrachidPas encore d'évaluation
- Cours 7 - SuitDocument4 pagesCours 7 - SuitMadjidAvengersPas encore d'évaluation
- Rep SouduresDocument18 pagesRep Souduresمحمد امين شريفPas encore d'évaluation
- Algorithme Et Les Instructions de Base + ConditionelleDocument12 pagesAlgorithme Et Les Instructions de Base + ConditionelleAGUERJA DOUHA100% (1)
- EnergieDocument6 pagesEnergiedhmen100% (2)
- Chapitre 12Document4 pagesChapitre 12trikiPas encore d'évaluation
- Apprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationD'EverandApprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationPas encore d'évaluation
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- L'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.D'EverandL'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.Évaluation : 3.5 sur 5 étoiles3.5/5 (6)
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- Dark Python : Apprenez à créer vos outils de hacking.D'EverandDark Python : Apprenez à créer vos outils de hacking.Évaluation : 3 sur 5 étoiles3/5 (1)
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Le guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandLe guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 5 sur 5 étoiles5/5 (2)
- Conception & Modélisation CAO: Le guide ultime du débutantD'EverandConception & Modélisation CAO: Le guide ultime du débutantPas encore d'évaluation
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Le Bon Accord avec le Bon Fournisseur: Comment Mobiliser Toute la Puissance de vos Partenaires Commerciaux pour Réaliser vos ObjectifsD'EverandLe Bon Accord avec le Bon Fournisseur: Comment Mobiliser Toute la Puissance de vos Partenaires Commerciaux pour Réaliser vos ObjectifsÉvaluation : 4 sur 5 étoiles4/5 (2)
- Dans l'esprit des grand investisseurs: Un voyage à la découverte de la psychologie utilisée par les plus grands investisseurs de tous les temps à travers des analyses opérationnellD'EverandDans l'esprit des grand investisseurs: Un voyage à la découverte de la psychologie utilisée par les plus grands investisseurs de tous les temps à travers des analyses opérationnellÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)