Vous aimerez peut-être aussi
- Le syndrome périodique associé à la cryopyrine (CAPS)D'EverandLe syndrome périodique associé à la cryopyrine (CAPS)Pas encore d'évaluation
- Exam TP UcDocument1 pageExam TP UcImad BenabdouallahPas encore d'évaluation
- Doui TP MicroDocument8 pagesDoui TP Microtitah mawloudPas encore d'évaluation
- Thiet Ke: Pham Quang TriDocument1 pageThiet Ke: Pham Quang Triacvip2010Pas encore d'évaluation
- Exercice 1:: @elmostarhfir Yassine@Document3 pagesExercice 1:: @elmostarhfir Yassine@adam ayatePas encore d'évaluation
- Proj Pic18f4550Document1 pageProj Pic18f4550Carlos JuniorPas encore d'évaluation
- Cours MicrocontroleurDocument10 pagesCours MicrocontroleurYahya AIDARAPas encore d'évaluation
- TP No 03 Les Afficheurs 7 SegmentsDocument2 pagesTP No 03 Les Afficheurs 7 Segmentsmustapha skanderPas encore d'évaluation
- Part 3Document1 pagePart 3Amirul HazzmiPas encore d'évaluation
- Chapitre 4 Les InterruptionsDocument6 pagesChapitre 4 Les InterruptionskaoutarPas encore d'évaluation
- TP1 Les - Ports - Parallèles - Afficheurs À LEDS: B. BouchibaDocument3 pagesTP1 Les - Ports - Parallèles - Afficheurs À LEDS: B. BouchibaFerouliPas encore d'évaluation
- Diagrama de Conexión HornoDocument1 pageDiagrama de Conexión HornomarcoPas encore d'évaluation
- PICKit2 Schematic PDFDocument1 pagePICKit2 Schematic PDFChornosDjajalPas encore d'évaluation
- Projet MPaPDocument2 pagesProjet MPaPDavid duranPas encore d'évaluation
- USB Bootloader PIC18F2550 PDFDocument1 pageUSB Bootloader PIC18F2550 PDFjocelynPas encore d'évaluation
- Control Mega2Document1 pageControl Mega2Sami MazouzPas encore d'évaluation
- ExerciceDocument1 pageExerciceInes DhamerPas encore d'évaluation
- Compte Rendu TP3Document5 pagesCompte Rendu TP3Triphel MapakaPas encore d'évaluation
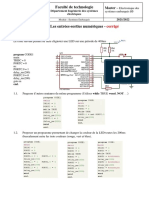
- TD TP 01 Les Entrées-Sorties Numériques - CorrigéDocument2 pagesTD TP 01 Les Entrées-Sorties Numériques - CorrigéWiam KhettabPas encore d'évaluation
- Rapport Du Projet 2 (Microcontroller)Document9 pagesRapport Du Projet 2 (Microcontroller)sowPas encore d'évaluation
- Program at Ion de PIC en BASICDocument19 pagesProgram at Ion de PIC en BASICIlham El MourabitPas encore d'évaluation
- COMMENTSIMULERSURISISpic 18Document3 pagesCOMMENTSIMULERSURISISpic 18Jawaher GhannouchiPas encore d'évaluation
- Exercices Corrigés Microcontrôleur Du Bac Technique en TunisieDocument28 pagesExercices Corrigés Microcontrôleur Du Bac Technique en TunisieLacina Bakayoko50% (2)
- TP2 Asp GBM3-LMDDocument4 pagesTP2 Asp GBM3-LMDDONIA JBELIPas encore d'évaluation
- TP 1 TP 2Document4 pagesTP 1 TP 2Kamologne UlrichPas encore d'évaluation
- Upload - Série D'exercices N°10-Pic-2014-2015-CorrectionDocument28 pagesUpload - Série D'exercices N°10-Pic-2014-2015-CorrectionHabib Ben Ammar100% (2)
- DS3 4ST - Système Climatisation Automobile - DTDocument4 pagesDS3 4ST - Système Climatisation Automobile - DTNejib JallouliPas encore d'évaluation
- TP - Micro - A29 - FR - New 6Document2 pagesTP - Micro - A29 - FR - New 6Antonio AL-TabishPas encore d'évaluation
- Projet Affichage A Persistance RetinienneDocument10 pagesProjet Affichage A Persistance RetinienneCaleb Junior OulotePas encore d'évaluation
- Circuitos 18F4550Document4 pagesCircuitos 18F4550Carlos GomezPas encore d'évaluation
- Lab MPLSDocument2 pagesLab MPLSUsername SOCIALPas encore d'évaluation
- 232 3VSDocument1 page232 3VSpdf4youPas encore d'évaluation
- Exercice 1:: Mot ADocument2 pagesExercice 1:: Mot Azenazel miloudPas encore d'évaluation
- TD 2Document5 pagesTD 2adda chariPas encore d'évaluation
- TP MicrocontroleurDocument26 pagesTP MicrocontroleurRonel valere FeussiPas encore d'évaluation
- Afficheur LCD PPTDocument24 pagesAfficheur LCD PPTSeddik MhamdiPas encore d'évaluation
- Usb 232bDocument1 pageUsb 232bpdf4youPas encore d'évaluation
- Contrele Sonopulse III PCI0405C Vs2.0aDocument1 pageContrele Sonopulse III PCI0405C Vs2.0amartinstex23Pas encore d'évaluation
- PIC16F877A Pin DiagramDocument1 pagePIC16F877A Pin DiagramAnh TuanPas encore d'évaluation
- Diagramas para PDC de ProteusDocument5 pagesDiagramas para PDC de ProteustenoriojantonioPas encore d'évaluation
- TP Freertos Pic18Document3 pagesTP Freertos Pic18Iyadallah MoussaPas encore d'évaluation
- Tl866ii PDFDocument4 pagesTl866ii PDFGeorge PapadoPas encore d'évaluation
- Cours ArduinoDocument100 pagesCours ArduinoAmil DhafPas encore d'évaluation
- Mini Pro Jet 7 Ion Testeur Circuits Integres Et AOPDocument3 pagesMini Pro Jet 7 Ion Testeur Circuits Integres Et AOPMohamed Ben FredjPas encore d'évaluation
- 1.555 SirenDocument1 page1.555 SirenSanket HulagePas encore d'évaluation
- TD CiDocument17 pagesTD CikoyabePas encore d'évaluation
- Ex 90 SiDocument8 pagesEx 90 SiDavid NicolasPas encore d'évaluation
- Cours Up Beguenane 5Document16 pagesCours Up Beguenane 5zied houanebPas encore d'évaluation
- En - Aek Mot tk200g1 - SchematicDocument10 pagesEn - Aek Mot tk200g1 - Schematicmiaryfanomezantsoa14Pas encore d'évaluation
- Informatique Industrielle - Part2Document33 pagesInformatique Industrielle - Part2Wassim GarredPas encore d'évaluation
- Manuale 8TSE-8MSE-MSE-TSE - F Rev1Document42 pagesManuale 8TSE-8MSE-MSE-TSE - F Rev1Daniel Aguirre100% (2)
- Série Dexercices Corrigés Microcontrôleur Du Bac Technique en TunisieDocument41 pagesSérie Dexercices Corrigés Microcontrôleur Du Bac Technique en Tunisiemaiz67% (3)
- Avr Jtag DebuggerDocument1 pageAvr Jtag DebuggerthietdaucongPas encore d'évaluation
- Le Clignotant: 6 RB1 7 RB2 8 RB3 9 RB4 10 RB5 11 RB6 12 RB7 13 VDD 14 RA0 17 RA1 18Document1 pageLe Clignotant: 6 RB1 7 RB2 8 RB3 9 RB4 10 RB5 11 RB6 12 RB7 13 VDD 14 RA0 17 RA1 18AYOUB ESSAIBPas encore d'évaluation
- HacheursDocument6 pagesHacheursdjellidelnPas encore d'évaluation
- SIN - 1 - 6 - ETAPE1 - Principe de La Communication en SerieDocument19 pagesSIN - 1 - 6 - ETAPE1 - Principe de La Communication en SerieKéba GUEYEPas encore d'évaluation
- Zelio Logic - Modules Logiques SR2-SR3Document2 pagesZelio Logic - Modules Logiques SR2-SR3Barchan Yâ SînPas encore d'évaluation
- Manuel Du CoursDocument122 pagesManuel Du CoursResultats RecherchePas encore d'évaluation
- Bac BlancDocument4 pagesBac BlancLabossef LabossefchedlyPas encore d'évaluation
- Generateur UltrasonsDocument7 pagesGenerateur UltrasonsHoussine FerjaouiPas encore d'évaluation
- CLASSE 6 Eme CC2Document2 pagesCLASSE 6 Eme CC2fopsPas encore d'évaluation
- Virtuialisation 1Document8 pagesVirtuialisation 1Jbali HelaPas encore d'évaluation
- Cours Architecture Des Systemes InformatiquesDocument37 pagesCours Architecture Des Systemes InformatiquesArmosPas encore d'évaluation
- Prévision Réel 2500 Ecart/obj. Ecart/obj. en %Document6 pagesPrévision Réel 2500 Ecart/obj. Ecart/obj. en %Fati FlourPas encore d'évaluation
- Microcontroleur PIC - Part 04 - PIC16F84Document4 pagesMicrocontroleur PIC - Part 04 - PIC16F84ngontingtopyarnaurPas encore d'évaluation
- Exercice SE Et HyperviseurDocument4 pagesExercice SE Et HyperviseurAbdel GansonrePas encore d'évaluation
- Support de Cour PIC16F877A Partie 0Document7 pagesSupport de Cour PIC16F877A Partie 0Zakaria hanaiPas encore d'évaluation
- Examen Final: Architecture Des Ordinateurs #ADODocument3 pagesExamen Final: Architecture Des Ordinateurs #ADOjafar henniPas encore d'évaluation
- Initiation InformatiqueDocument8 pagesInitiation InformatiqueFreddy NdjoliPas encore d'évaluation
- VirtualisationDocument3 pagesVirtualisationTekayaPas encore d'évaluation
- Tric ELN 15-20 Ce 01 It-UkDocument19 pagesTric ELN 15-20 Ce 01 It-UkMasparts MaspartsPas encore d'évaluation
- COURS ImsetDocument17 pagesCOURS ImsetSkander Ben OthmenPas encore d'évaluation
- Compte Rendu TP MicroDocument17 pagesCompte Rendu TP MicroJunior Yoann NzangPas encore d'évaluation
- Examens 5 Et 6 Systèmes Et Périphériques NumériquesDocument8 pagesExamens 5 Et 6 Systèmes Et Périphériques NumériquesScribdTranslationsPas encore d'évaluation
- Correction TD3Document3 pagesCorrection TD3Mouna Ben MohamedPas encore d'évaluation
- Res EauxDocument20 pagesRes EauxHouss terPas encore d'évaluation
- Tic Et TiceDocument6 pagesTic Et TiceOmar BelaoudiaPas encore d'évaluation
- Intro LabVIEW 3 V2Document37 pagesIntro LabVIEW 3 V2Mourad AziriPas encore d'évaluation
- Cours ArduinoDocument17 pagesCours ArduinoSaleh ElmnasriPas encore d'évaluation
- Sel TD PDFDocument19 pagesSel TD PDFmike likePas encore d'évaluation
- Rapport de PFADocument6 pagesRapport de PFAChayma LahdhiriPas encore d'évaluation
- Partie 2Document126 pagesPartie 2AHMED AYADIPas encore d'évaluation
- CyberLink Director Suite 365 v9.0 Final Pré-Activé Multi-FR Format ISO (Winx64)Document4 pagesCyberLink Director Suite 365 v9.0 Final Pré-Activé Multi-FR Format ISO (Winx64)zevotco jemmyPas encore d'évaluation
- Performances Des ProcesseursDocument29 pagesPerformances Des ProcesseursSalas Salvador DiosdadoPas encore d'évaluation
- Windows 11Document7 pagesWindows 11Ismaël YANOGOPas encore d'évaluation
- 9-Les MémoiresDocument55 pages9-Les Mémoireslmons saroutPas encore d'évaluation
- Cours Microprocesseurs ENSADocument156 pagesCours Microprocesseurs ENSAAbdelkbir HadiouiPas encore d'évaluation
- Chapitre 1 Et Chapitre 2 AODocument42 pagesChapitre 1 Et Chapitre 2 AOÑį HăđPas encore d'évaluation
- Chapitre 02 Architecture Microprocesseur - LFSJG11Document19 pagesChapitre 02 Architecture Microprocesseur - LFSJG11Faïza TabbanaPas encore d'évaluation
- SR - Chapitre 1 - Les Systèmes EmbarquésDocument19 pagesSR - Chapitre 1 - Les Systèmes EmbarquésRadhwane CharradaPas encore d'évaluation