Vous aimerez peut-être aussi
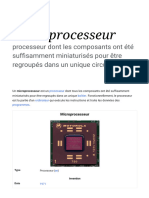
- Microprocesseur - WikipédiaDocument23 pagesMicroprocesseur - WikipédiaJuniorPas encore d'évaluation
- TP MicroprocesseurDocument17 pagesTP MicroprocesseurYakoub KoppPas encore d'évaluation
- Microprocesseur - WikipédiaDocument24 pagesMicroprocesseur - WikipédiaHénock HOUNGUEVOUPas encore d'évaluation
- MicroprocesseurDocument11 pagesMicroprocesseurlolizepazePas encore d'évaluation
- MICRODocument4 pagesMICROWalter FopaPas encore d'évaluation
- 01 Les Processeurs 64 Bits Et Multicoeurs BRUYERE DRACHEDocument8 pages01 Les Processeurs 64 Bits Et Multicoeurs BRUYERE DRACHESandra BouPas encore d'évaluation
- Cours Sur Le MicroprocesseurDocument2 pagesCours Sur Le MicroprocesseurEliseePas encore d'évaluation
- Processeur - WikipédiaDocument32 pagesProcesseur - Wikipédiauus633645Pas encore d'évaluation
- Exposé D'informatiqueDocument12 pagesExposé D'informatiqueKarim AzzouzPas encore d'évaluation
- Le Micro ProcesseurDocument9 pagesLe Micro ProcesseurZaazadPas encore d'évaluation
- Architecture Des OrdinateursDocument33 pagesArchitecture Des OrdinateursMarshall Christ-Trésor N'GuessanPas encore d'évaluation
- Projet Informatiue 2Document29 pagesProjet Informatiue 2zemozobel51Pas encore d'évaluation
- HidtoireDocument6 pagesHidtoireJules BeugrePas encore d'évaluation
- COURS ARPA Chap1 3Document6 pagesCOURS ARPA Chap1 3moudouPas encore d'évaluation
- Notes de Cours Calculateurs - Interfacage - Chap 1 - 2Document27 pagesNotes de Cours Calculateurs - Interfacage - Chap 1 - 2Амр ХашмиPas encore d'évaluation
- Informatique IndustrielleDocument16 pagesInformatique IndustrielleNo RayaPas encore d'évaluation
- Histoire de MicroprocesseurDocument18 pagesHistoire de Microprocesseurbenhamzaikram2318Pas encore d'évaluation
- Process EurDocument15 pagesProcess EurGanesh PaulPas encore d'évaluation
- IntroductionDocument9 pagesIntroductionAE07Pas encore d'évaluation
- Cours 02Document6 pagesCours 02Wiam KhettabPas encore d'évaluation
- Sys Up Chap IDocument14 pagesSys Up Chap IAbderrahmane WrPas encore d'évaluation
- Diapositives Cours Intro Info IndusDocument107 pagesDiapositives Cours Intro Info IndusElnBEKKARYPas encore d'évaluation
- Le ProcesseurDocument13 pagesLe ProcesseurSefah MedPas encore d'évaluation
- Le ProcesseurDocument13 pagesLe ProcesseurCompte PiratéPas encore d'évaluation
- Introduction Au ProcesseursDocument24 pagesIntroduction Au ProcesseursOliver TwistePas encore d'évaluation
- Architecture Du ProcesseurDocument5 pagesArchitecture Du ProcesseurLinda GachaPas encore d'évaluation
- Leçon N°1: Presentation de L'Informatique Industrielle Et Des Systemes Micro-Programmes I - L'Informatique IndustrielleDocument120 pagesLeçon N°1: Presentation de L'Informatique Industrielle Et Des Systemes Micro-Programmes I - L'Informatique IndustrielleFulbert FissouPas encore d'évaluation
- Chapitre 2 Systemes A Base de Microprocesseurs - C2I2S - S1Document29 pagesChapitre 2 Systemes A Base de Microprocesseurs - C2I2S - S1Karym ElhoussinePas encore d'évaluation
- StageDocument5 pagesStageFred Briston Feutio FomekongPas encore d'évaluation
- Chap 1Document4 pagesChap 1christimimbangPas encore d'évaluation
- ProcesseurDocument12 pagesProcesseurlolizepazePas encore d'évaluation
- M-Electronique Numerique Avancee VHDl-FPGA-Chapitre1Document12 pagesM-Electronique Numerique Avancee VHDl-FPGA-Chapitre1wafa wafaPas encore d'évaluation
- Microprocesseurs ATMEL Part1Document10 pagesMicroprocesseurs ATMEL Part1Mustapha ramziPas encore d'évaluation
- Cours Microcontrôleur Microprocesseur 23Document51 pagesCours Microcontrôleur Microprocesseur 23karima seghaierPas encore d'évaluation
- QCM Généralités InformatiquesDocument11 pagesQCM Généralités InformatiquesGhislaine REMONDO100% (1)
- Microprocesseurs DSP Chapitre1Document8 pagesMicroprocesseurs DSP Chapitre1MENANI ZineddinePas encore d'évaluation
- Cours Microcontrôleurs-Tres ImportantDocument132 pagesCours Microcontrôleurs-Tres ImportantNabil Dakhli0% (1)
- Le ProcesseurDocument12 pagesLe ProcesseurSalah SalahPas encore d'évaluation
- Chapitre V MicroprocesseurDocument10 pagesChapitre V MicroprocesseurMouhamed MoustaphaPas encore d'évaluation
- Chapitre II (Microcontrolleurs)Document28 pagesChapitre II (Microcontrolleurs)Rayene RinaPas encore d'évaluation
- Cours Microprocesseurs ENSADocument156 pagesCours Microprocesseurs ENSAAbdelkbir HadiouiPas encore d'évaluation
- Systèmes Embarqués - Chapitre 1Document24 pagesSystèmes Embarqués - Chapitre 1flav legrand mongouoPas encore d'évaluation
- Compte RENDU InformatiqueindutrielDocument21 pagesCompte RENDU InformatiqueindutrielOUTMANE FERNOUCHPas encore d'évaluation
- Chap 2Document30 pagesChap 2Toon ManPas encore d'évaluation
- Chapitre 1Document58 pagesChapitre 1Ahmed JguirimPas encore d'évaluation
- Chapitr 001Document5 pagesChapitr 001oussama bouguerraPas encore d'évaluation
- Chapitre4 PDFDocument44 pagesChapitre4 PDFAmina NouriPas encore d'évaluation
- Chapitre II Architecture Générale D Un MicrocontroleurDocument22 pagesChapitre II Architecture Générale D Un Microcontroleurfou100% (1)
- Nouveau Présentation Microsoft PowerPointDocument22 pagesNouveau Présentation Microsoft PowerPointmaiz100% (1)
- Chapitre 2 - Microprocesseur - Ok - CopieDocument36 pagesChapitre 2 - Microprocesseur - Ok - CopieHama Mossi Abdoul RazakPas encore d'évaluation
- Cours - HardwareDocument19 pagesCours - HardwareFélix GueretPas encore d'évaluation
- Micro ControleurDocument56 pagesMicro ControleurYounes Akakba100% (1)
- Cours Microprocesseur Microcontra - Leur API PLCDocument23 pagesCours Microprocesseur Microcontra - Leur API PLCnadjibPas encore d'évaluation
- Chap 1Document18 pagesChap 1Maella AdjPas encore d'évaluation
- Cours-Microproc 2018Document192 pagesCours-Microproc 2018Badr Eddine EL HAGAOUIPas encore d'évaluation
- Cours Codesign Chapitre2 20232024Document67 pagesCours Codesign Chapitre2 20232024nassimarafa009Pas encore d'évaluation
- ProcesseurDocument9 pagesProcesseuryanis si hadj mohand100% (1)
- Chaiptre 1 Systeme A MicroprocesseurDocument13 pagesChaiptre 1 Systeme A MicroprocesseurStive TagnePas encore d'évaluation
- Informatique physique: Explorer la vision par ordinateur dans l'informatique physiqueD'EverandInformatique physique: Explorer la vision par ordinateur dans l'informatique physiquePas encore d'évaluation
- Les macros avec OpenOffice CALC: La programmation BASIC pour tousD'EverandLes macros avec OpenOffice CALC: La programmation BASIC pour tousPas encore d'évaluation
- Python1-1 Et 1-2 DERIVEES PARTIELLESDocument9 pagesPython1-1 Et 1-2 DERIVEES PARTIELLESAmeth baPas encore d'évaluation
- Visualisation D'une Fonction de 2 Variables - Cours PythonDocument7 pagesVisualisation D'une Fonction de 2 Variables - Cours PythonAmeth baPas encore d'évaluation
- Norme (Mathématiques) - WikipédiaDocument9 pagesNorme (Mathématiques) - WikipédiaAmeth baPas encore d'évaluation
- Airbus Vs Boeing AirplaneDocument3 pagesAirbus Vs Boeing AirplaneAmeth baPas encore d'évaluation
- Cours 1 EstdDocument63 pagesCours 1 EstdridaelfajjajPas encore d'évaluation
- 70 902 FR Preparation Des Faisceaux PDFDocument42 pages70 902 FR Preparation Des Faisceaux PDFPierre ConsimboPas encore d'évaluation
- Formation Maintenance InformatiqueDocument3 pagesFormation Maintenance InformatiqueTambo Youbissi Gérald100% (1)
- La Virtualisation Avec Etude de CasDocument46 pagesLa Virtualisation Avec Etude de CasTaher JelleliPas encore d'évaluation
- TD Informatique Niveau 2Document4 pagesTD Informatique Niveau 2Rouy ArnaudPas encore d'évaluation
- MS DosDocument22 pagesMS Dosmouhzebbiche98Pas encore d'évaluation
- Genesis 32X (VA0, VA1) - Mega Drive 32X Service Manual, June, 1995Document34 pagesGenesis 32X (VA0, VA1) - Mega Drive 32X Service Manual, June, 1995Antonio VelkovPas encore d'évaluation
- Ordinateur 05Document16 pagesOrdinateur 05Mehieddine Asloun100% (1)
- Partie Électrique: Bornes Du Arduino UnoDocument18 pagesPartie Électrique: Bornes Du Arduino Unoسلمي سلميPas encore d'évaluation
- Ce 8080 QG 01 EndefrnlitesruDocument2 pagesCe 8080 QG 01 EndefrnlitesruSemper FilePas encore d'évaluation
- Configuration MonoposteDocument4 pagesConfiguration MonoposteMustapha ZianiPas encore d'évaluation
- Support Step 3 - Cours 2 - La Gestion Budgétaire Commerciale 2Document16 pagesSupport Step 3 - Cours 2 - La Gestion Budgétaire Commerciale 2Adama DjaloPas encore d'évaluation
- Examen Architecture 2008Document2 pagesExamen Architecture 2008dhaouadi hazemPas encore d'évaluation
- ITE7 Chp10Document20 pagesITE7 Chp10Mamadou yahya BarryPas encore d'évaluation
- Primor 3570 Spare Parts ListDocument136 pagesPrimor 3570 Spare Parts ListImbunatatire VederePas encore d'évaluation
- Cours D - Economie Tseco Lassi-1 PDFDocument81 pagesCours D - Economie Tseco Lassi-1 PDFLassine Fofana100% (2)
- Fc8000 ManuelDocument186 pagesFc8000 ManuelRenaudLacorPas encore d'évaluation
- A - Introduction ElectroniqueDesSysEmbarqués PDFDocument59 pagesA - Introduction ElectroniqueDesSysEmbarqués PDFAnas AsranPas encore d'évaluation
- 240-Pin Sdram Udimm PinoutDocument3 pages240-Pin Sdram Udimm Pinoutsubroto bosuPas encore d'évaluation
- Hello WorldDocument23 pagesHello WorldTARIQ BICHARPas encore d'évaluation
- Cpu 2Document29 pagesCpu 2Aymen AbassiPas encore d'évaluation
- PS4 Guide de Mise en Route CUH-2016A, CUH-2016BDocument18 pagesPS4 Guide de Mise en Route CUH-2016A, CUH-2016BDavid DelplacePas encore d'évaluation
- Leçon 2Document4 pagesLeçon 2el karamPas encore d'évaluation
- Cybelec DNC 60 Ps Operation User S Manual 113Document113 pagesCybelec DNC 60 Ps Operation User S Manual 113Burhan YasarPas encore d'évaluation
- Mon OrdinateurDocument14 pagesMon OrdinateurImelda ITALIPas encore d'évaluation
- 9.Tp Word ArchitectureDocument1 page9.Tp Word ArchitectureKhardaniMaamerPas encore d'évaluation
- Cours Informatique Temps-RéelDocument45 pagesCours Informatique Temps-Réelraghda amamiPas encore d'évaluation
- Chapitre1 2pagesDocument15 pagesChapitre1 2pagesOmri OmarPas encore d'évaluation
- 15ret3825b PCR Ncr-Pos-Terminal FR Ds VFDocument2 pages15ret3825b PCR Ncr-Pos-Terminal FR Ds VFBenni Mohamed AminePas encore d'évaluation
- Structure Systeme MicropDocument6 pagesStructure Systeme MicropLahoussine ElmahniPas encore d'évaluation