Académique Documents
Professionnel Documents
Culture Documents
Fourier, Fonction de Transfert Et Filtres Électriques
Transféré par
ziyadouali3Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Fourier, Fonction de Transfert Et Filtres Électriques
Transféré par
ziyadouali3Droits d'auteur :
Formats disponibles
P Agrég/Capes ▼ Licence 1 ▼ Collège/Lycée ▼ Outils ▼
Cours de physique chimie
Documents de référence
Sommaire Fonction de transfert - filtrages
Nouv prog physique PC
Vidéos Ce cours est disponible intégralement en vidéos dans une playlist Youtube que voici : Nouv prog physique PCSI
Prog de Term
Prog de 1ère
Bonus
Prog de 2nde
Prog de collège (5/4/3)
Autres chapitres
Derniers ajouts
Une vidéo sur des bases
de mécanique:
projection de forces et
principe fondamental
de la dynamique, PFD
et forces de frottements
Nouvelle série de
vidéos de physique
pour préparer l'entrée
en prépa scientifique :
Destination prépa
Liens
Il a été découpé en 8 séquences: Liens divers
Femto par Jimmy Roussel
1. Sommaire
2. Système linéaire et séries de Fourier
3. Transformée de Fourier et applications Physique à l'ENSCR
4. Notion de fonction de transfert, exemples
5. Généralités sur les filtres électriques
6. Etude complète d'un filtre passe-bas
7. Filtre passe-haut, application des filtres passes-bas et passe-haut : le filtre ADSL
8. Filtre passe-bande et application
Retrouver, entre autres, des
contenus de travaux pratiques,
1. Introduction produits par l'équipe de
physique de l'ENSCR
Dans ce cours nous allons définir la fonction de transfert d'un système physique linéaire et l'appliquer à la notion
de filtrage électronique. Mais avant d'atteindre l'objectif, nous passerons en revue quelques notions théoriques
fondamentales en physique telles que :
Importance du régime sinusoïdal : décomposition en série de Fourier, spectre en fréquences, notion de
fondamental et d'harmoniques ;
Transformée de Fourier ;
Passage d'une équation différentielle à une équation linéaire en utilisant le passage en complexe.
C'est alors que nous verrons la notion de fonction de transfert, qui en caractérisant un système donné, nous permet
de calculer le signal de sortie si l'on connaît le signal d'entrée.
Nous utiliserons alors la fonction de transfert en l'appliquant aux filtres électriques.
2. Définition d'un système linéaire - exemples
2.1 Système linéaire
On considère un système physique quelconque, que l'on représente de la façon suivante :
Figure 1 - Système physique, entrée et sortie
Ce système fournit un signal de sortie s(t) dépendant du signal d'entrée e(t).
Généralement, celui-ci est décrit mathématiquement par une équation différentielle temporelle qui relie l'entrée et
la sortie :
n n
de(t) d e(t) ds(t) d s(t)
a 0 e(t) + a 1 + … + an = b0 s(t) + b1 + … + bn (1)
n n
dt dt dt dt
Cette équation étant linéaire, les systèmes étudiés sont qualifiés de linéaires: un tel système implique la
vérification du principe de superposition :
si on connaît les signaux de sortie s 1 (t) et s 2 (t) correspondant aux entrées e 1 (t) et e 2 (t) , alors la sortie
correspondant au signal d'entrée λ e 1 1 (t) + λ2 e2 (t) est λ s (t) + λ s (t) . 1 1 2 2
Résoudre cette équation différentielle (1) revient à connaître la sortie en fonction de l'entrée connue.
Malheureusement, cette équation peut être difficile à résoudre.
2.2 Exemples
De nombreux systèmes physiques classiques sont linéaires:
Les circuits électriques composés de conducteur ohmique, de condensateur et de bobine ;
Un système masse-ressort, que l'on peut exciter sinusoïdalement ;
Une pièce chauffée par un radiateur, on étudie l'évolution de la température de la pièce avec "comme
excitateur" la puissance d'alimentation fournie.
3. Importance du régime sinusoïdal
3.1 Généralités
En physique, on a souvent à faire à des signaux périodiques, voir sinusoïdaux: variation de la température dans
une journée, ondes (acoustiques, électromagnétiques, électriques, mécaniques).
D'après la théorie des séries de Fourier, tout signal périodique peut se décomposer en une somme de fonctions
sinusoïdales (sinus et cosinus): c'est la décomposition en série de Fourier.
On peut même aller plus loin, en généralisant la décomposition de Fourier à un signal non périodique : en effet,
on peut considérer celui-ci comme un signal de période infinie. Dans ce cas on utilise un outil, la transformée de
Fourier.
Le but de ce travail mathématique, série de Fourier ou transformée de Fourier, est de pouvoir étudier la sortie du
système linéaire s(t) en fonction de n'importe quelle entrée e(t) : on décomposera l'entrée en somme de signaux
simples e (t), on étudie les sorties s (t) pour chaque entrée e (t), on recompose la sortie s(t) = ∑ s (t). C'est
i i i i i
l'application du principe de superposition qui nous permet cela.
3.2 Décomposition en série de Fourier
3.2.1 Pourquoi une somme de sinus et cosinus?
2π
Soit une fonction f (t) périodique de période T0 = que l'on cherche à approcher à l'aide d'une somme de
ω0
fonctions sinusoïdales, par exemple du type K sin (n ω0 t + φ) avec n un entier positif ou nul.
On cherche donc la décomposition en fonctions de même période ou de période égale à une fraction (un multiple
si l'on parle en pulsation) de la période de la fonction que l'on veut approximer.
Imaginons alors la fonction f (t) suivante :
Figure 2 - Fonction à approximer par une somme de sinus et cosinus
Superposons lui la première fonction sinusoïdale de la décomposition, soit K sin (ω0 t + φ) (le cas n = 0 est
particulier, cela représenterait la composante continue s'il y en avait une) :
Figure 3 - Fonction à approximer et sinus de même fréquence
Pour que cette fonction sinus colle au mieux à la fonction f (t), on peut jouer sur son amplitude :
Figure 4 - Jouer sur l'amplitude : l'augmenter Figure 5 - Jouer sur l'amplitude : la diminuer
Ou sur sa phase :
Figure 6 - Jouer sur la phase : l'augmenter Figure 7 - Jouer sur la phase : la diminuer
Mais il n'est pas très intéressant de faire jouer deux paramètres sur une même fonction. Il est donc plus facile de
décomposer chaque fonction K sin (n ω t + φ) : 0
sin (a + b) = sin a cos b + cos a sin b (2)
⟹ K sin (ω0 t + φ) = K cos φ sin (n ω0 t) + K sin φ cos (n ω0 t) (3)
= K1 sin (n ω0 t) + K2 cos (n ω0 t) (4)
Ainsi, au lieu de jouer sur deux paramètres dépendants car propriétés d'une même fonction, on va plutôt
décomposer la fonction f (t) en une somme de sinus et de cosinus et ajuster les deux paramètres indépendants qui
sont les amplitudes K et K . 1 2
3.2.2 Calcul de l'erreur faite entre f (t) et une des fonctions sinusoïdales
Comparons à présent la fonction f (t) et la première fonction sinus :
Figure 8 - Comparaison de la fonction à approximer f (t) et de la fonction sinus
L'erreur que l'on fait en approximant f (t) par K 1 sin ω0 t est représentée par l'aire entre les deux courbes :
Figure 9 - Aire entre les deux courbes
Mathématiquement, une aire est une intégrale, l'aire entre les deux courbes s'écrit donc :
T
A = ∫ (f (t) − K1 sin ω0 t) dt (5)
0
Nous avons un petit problème, car la courbe rouge est tantôt au dessus de la bleue tantôt en dessous, ainsi l'aire
(5) est parfois positive (partie hachurées) parfois négative (parties pointés).
Nous pourrions travailler en valeur absolue, mais il faudrait alors distinguer les cas ce qui n'est pas pratique.
Sachant que nous cherchons à minimiser cette aire, et que mathématiquement, le minimum de la fonction
T T
A = ∫ (f (t) − K1 sin ω0 t) dt et celui de la fonction A
∗
= ∫ (f (t) − K1 sin ω0 t)
2
dt sont identiques,
0 0
nous utiliserons cette dernière intégrale qui évite le problème des intégrales signées.
Il nous faut à présent déterminer le minimum de la fonction en question, ceci se fait grâce à la dérivée, et
rappelons nous que l'on cherche à ajuster le paramètre K pour que l'aire entre les deux courbes soient minimales. 1
Ainsi on veut :
∗
dA
= 0 (6)
dK 1
T
d
2
⟺ ∫ (f (t) − K 1 sin ω0 t) dt = 0 (7)
dK 1 0
T T T
d
2 2 2
⟺ (∫ f (t) dt + ∫ K sin (ω0 t) dt − ∫ 2 K 1 f (t) sin (ω0 t) dt) = 0 (8)
1
dK 1 0 0 0
T T
2
⟺ 0 + 2 K1 ∫ sin (ω0 t) dt − 2 ∫ f (t) sin (ω0 t) dt = 0 (9)
0 0
T
T
⟺ 2 K1 − 2 ∫ f (t) sin (ω0 t) dt = 0 (10)
2 0
T
2
⟺ K1 = ∫ f (t) sin (ω0 t) dt (11)
T 0
On a donc trouver l'expression du paramètre K permettant de minimiser l'erreur fait quand on approxime f (t) à 1
l'aide de K sin ω t . On peut généraliser avec toutes les fonctions sinus et les fonctions cosinus. On note
1 0
généralement les paramètres a pour les cos et b pour les sin. n n
La décomposition en série de Fourier de la fonction f (t), c'est à dire son
approximation par une somme de fonctions sinusoïdales s'écrit :
∞
a0
f (t) = + ∑(a n cos(nω0 t) + bn sin(nω0 t)) (12)
2
n=1
avec :
T
2
an = ∫ f (t) cos(nω0 t) dt (13)
T 0
T
2
bn = ∫ f (t) sin(nω0 t) dt (14)
T 0
qui sont les coefficients réels de la série de Fourier.
Cette décomposition peut être écrite en somme de fonctions sinusoïdales
possédant une amplitude et une phase :
∞
a0
f (t) = + ∑ cn cos(nω0 t + φ n ) (15)
2
n=1
−−−− −− bn
avec c n
2 2
= √a n + bn et tan φ n = − .
an
La notation complexe peut également être utilisée :
∞
i nω0 t
f (t) = ∑ Cn e (16)
n=−∞
T
1
avec C n = ∫ f (t) e
−i n ω0 t
dt
T 0
3.2.3 Valeur moyenne, fondamental et harmoniques
T
a0 1
Le terme = ∫ f (t) dt qui est distingué dans ces décompositions représente la valeur moyenne du
2 T 0
signal (la composante continue).
Lorsque n = 1 , on parle de la composante fondamentale du signal caractérisée par a et b . 1 1
Pour tout autre valeur de n , on parle d'harmonique de rang n caractérisée par les valeurs de a et b . n n
3.2.4 Remarques
Nous avons expliqué l'obtention des coefficients de Fourier en partant d'une fonction en
K sin (n ω t + φ) alors qu'on a une fonction en c
n 0 cos (n ω t + φ) dans les formules précédentes : cela n 0
π
n'a pas d'importance, sin θ = cos ( − θ) .
2
En cas de fonction f (t) paire ou impaire, les coefficients de la décomposition de Fourier sont simplifiés,
notamment :
si f (t) est paire, b = 0 ; n
si f (t) est impaire, a = 0. n
3.2.5 Cas des fonctions paires et impaires
Fonction paire
T
4 2
Si s(t) est une fonction paire alors s(t) cos(nωt) est paire. On a : an = ∫ s(t) cos(nωt) dt pour n ≠ 0
T 0
T
2 2
et a 0 = ∫ s(t)dt .
T 0
La fonction s(t) sin (nωt) est impaire et b n = 0 .
Fonction impaire
Si s(t) est une fonction impaire alors s(t) cos(nωt) est impaire et a n = 0, ∀n .
La fonction s(t) sin(nωt) est paire.
T
4 2
On a donc : b n = ∫ s(t) sin (nωt) dt .
T 0
3.2.6 Spectres
A l'issue de la décomposition d'un signal "complexe" périodique en série de Fourier, on peut tracer deux spectres :
Le spectre d'amplitude : on représente sur un graphique l'amplitude de chacun des termes de la
décomposition en série de Fourier en fonction de la fréquence (ou pulsation) soit c = f (ω ) ; n n
Le spectre de phase : on peut représenter la phase de chaque terme en fonction de la fréquence soit
φ = f (ω ) .
n n
Illustrons cela en comparant la représentation temporelle et spectrale de notre signal de départ :
S
F
S " "
Figure 11 - Représentation temporelle du signal
décomposée
Figure 10 - Signal périodique quelconque
Figure 12 - Spectre en amplitude représentant les
premiers harmoniques du signal
3.3 Application à l'acoustique musicale
Le son des instruments est un signal souvent "complexe" mais périodique, une décomposition en série de Fourier
permet de connaître les composantes fréquentielles principales qui interviennent dans un son.
Prenons un La 440, qui sert souvent de référence aux musiciens pour accorder leur instrument. Comparons les
signaux et spectres pour différents instruments simulés par un synthétiseur :
Pour un piano
Figure 13 - Signal temporel du piano
Figure 14 - Signal spectral du piano
Le signal est quasiment sinusoïdal, nous ne sommes pas surpris d'obtenir un spectre avec quasiment que le
fondamental qui apparaît, à 440 Hz.
Pour une trompette
Figure 16 - Signal spectral du trompette
Figure 15 - Signal temporel du trompette
On a un signal temporelle bien plus complexe, et donc un spectre en fréquence riche en harmoniques. On voit
même que l’intensité des harmoniques compris entre 1 et 2 kHz est importante.
C’est cette signature fréquentielle qui donne le timbre de l’instrument.
Pour une violon
Figure 18 - Signal spectral du violon
Figure 17 - Signal temporel du violon
Le signal est différent de celui de la trompette, pourtant il est composé des mêmes harmoniques. Le timbre du
violon est différent de celui de la trompette car l'intensité de chaque harmonique est différente.
4. Notion de transformée de Fourier
4.1 Théorie
Comme nous l'avons évoqué précédemment, la théorie de la décomposition en série de Fourier, qui ne fonctionne
que pour des signaux périodiques, peut-être généralisée avec des fonctions non périodiques. On passe de l'un à
l'autre en considérant qu'un signal non périodique est un signal périodique de période qui tend vers l'infini.
Nous n'allons pas démontrer mathématiquement le passage de série de Fourier à transformée de Fourier car cela
s'avère complexe, nous retiendrons juste le résultat :
∞
1 −i ω t
F (ω) = ∫ f (t) e dt (17)
−
−−
√2 π −∞
est la transformée de Fourier de la fonction f (t). Cela permet de passer du domaine temporel au domaine
spectral (fréquence ou pulsation). A noter que comme on considère la période du signal infinie, la pulsation ω tend
2π
vers 0 ( on rappelle que ω = ) : autrement dit, le spectre n'est pas discret (pas de fondamental f et
T
d'harmoniques f n = nf ), mais un spectre continu.
∞
1 i ω t
f (t) = ∫ F (ω) e dω (18)
−
−−
√2 π −∞
est la transformée de Fourier inverse de la fonction F (ω) . Elle permet de passer du domaine spectral au
domaine temporel.
Une fonction f (t) quelconque peut être considérée comme une superposition
continue de fonctions sinusoïdales. \newline Le terme F (ω) est l'équivalent du
terme c de la décomposition en série de Fourier, il représente "le poids" de la
n
composante spectrale de pulsation ω.
4.2 Applications
4.2.1 Train d'onde et largeur de raie spectrale
En optique, le spectre d'une source lumineuse dépend de la longueur des trains d'ondes émis par ses atomes. On
peut comparer les spectres de deux sources plus ou moins monochromatiques. Le spectre F (ν ) est obtenu par le
calcul de la transformée de Fourier de la fonction f (t) qui représente le train d'onde.
Le spectre d'un laser He-Ne est quasiment monochromatique, il présente une unique raie à la fréquence ν 0
correspondant à la longueur d'onde du laser. Ainsi, on peut considérer que les trains d'onde émis par cette source
sont des sinusoïdes infinies :
Figure 19 - Train d'ondes laser et spectre correspondant
Si on considère une lampe à vapeur de mercure, on peut observer une raie verte qui n'est pas monochromatique, le
spectre associé montre une certaine largeur de raie qui signifie que les trains d'onde émis pour former cette raie
verte sont beaucoup plus court que dans le cas du laser:
Figure 20 - Train d'ondes lampe He-Ne et spectre correspondant
4.2.2 Diffraction des rayons X par un cristal
L'étude de cristaux se fait également grâce à la transformée de Fourier : les atomes d'un cristal sont disposés
régulièrement dans l'espace de façon triplement périodique (réseau).
On envoie un pinceau de rayon X monochromatique sur un cristal que l'on met en rotation. Les électrons des
atomes diffractent les rayons, on récupère alors le résultat de cette diffraction sur un capteur CCD: on obtient une
répartition de taches de diffraction (réseau réciproque) qui est la transformée de Fourier du cristal.
Si l'amplitude diffractée est définie par une fonction F (X, Y , Z ) on remonte à la densité électronique du cristal
définie par une fonction f (x, y, z). On peut alors en déduire la répartition tridimensionnelle des atomes du cristal
et les liaisons entre ces atomes.
5. Notion de fonction de transfert
Revenons à présent au cœur de notre chapitre. Rappelons qu'une fois la fonction de transfert d'un système est
établie, on peut connaître le signal de sortie pour n'importe quel signal d'entrée.
5.1 Rappels sur le régime sinusoïdal
Lorsque l'on passe en régime sinusoïdal, on considère que l'entrée est une fonction complexe
e (t) = E e = E e
−−
et la sortie une fonction complexe s(t) = S e
j(ω t+φ e)
= S e .
j ω t j(ω t+φ s) j ω t
– – −
−
Les nombres complexes − E = Ee
−
et j φe
S = S e
j φs
sont appelés amplitudes complexes, ils contiennent les
−
−
informations d'amplitude et de phase.
Le grand intérêt du passage en complexe est de transformer une équation différentielle en équation linéaire car, en
régime sinusoïdal:
d 1
≡ ×j ω ∫ dt ≡ × (19)
dt jω
5.2 Définition de la fonction de transfert
La fonction de transfert complexe d'un système traité en régime sinusoïdal s'écrit :
S
H (j ω) = −
− (20)
−
− E
−
−
L'intérêt de cette fonction est qu'une fois déterminée, il suffit de multiplier l'entrée par la fonction de transfert
pour connaître la sortie.
Cette fonction donne accès :
Au rapport des amplitudes, en prenant le module de la fonction de transfert complexe:
S
| H (j ω)| = H (j ω) = (21)
−− E
\item Au déphasage, en prenant son argument :
φ s − φ e = Arg( H (j ω)) (22)
−−
5.3 Exemple de fonction de transfert en mécanique
On étudie le comportement d'un chariot qui se déplace sans frottement le long d'un axe Ox, celui-ci est soumis à
deux forces, la force de rappel d'un ressort et une force de frottement fluide exercé par un amortisseur:
Figure 21 - Système mécanique excité sinusoïdalement
On prend la position d'origine de l'axe coïncidant à la longueur à vide du ressort.
Appliquons le principe fondamental de la dynamique au chariot dans le référentiel terrestre galiléen.
→ →
m a = ∑ F ext (23)
m ẍ = −k x − λ ẋ + f (t) (24)
α k
ẍ + ẋ + x = f (t) (25)
m m
Considérons à présent le régime sinusoïdal : si l'entrée f (t) est sinusoïdal, alors la sortie x(t) l'est également.
On pose donc f (t) = E e
j ω t+φ e
pour l'entrée et x (t) = S e
j ω t+φ s
. L'équation différentielle devient:
− −
−
2
α k j φ j φ
(−ω + jω + ) S e s
= Ee e
(26)
m m
La fonction de transfert vaut donc :
S 1
H (j ω) = −
− = (27)
−
− E k α
−
− 2
( − ω ) + j ω
m m
k α
Si on pose, comme classiquement, ω
2
0
= la pulsation propre d'oscillation du système et λ = le
m 2m
coefficient d'amortissement, la fonction de transfert s'écrit :
1
H (j ω) = (28)
−
− 2 2
(ω − ω ) + j2λω
0
jC ω 1 1
S = E = E = E (29)
−
− 1 −
− 2 −
− 1 R −
−
jRC ω − LC ω + 1
2
R + jLω + − ω + j ω
jC ω LC L
1 R
On pose ω
2
0
= la pulsation propre d'oscillation du système et λ = le coefficient d'amortissement, la
LC 2L
fonction de transfert s'écrit:
S 1
H (j ω) = −
− = (30)
−
− E 2 2
−
− (ω − ω ) + j2λω
0
On retrouve la même fonction de transfert qu'en mécanique par analogie électromécanique.
5.4 Exemple de fonction de transfert en électrocinétique
On étudie le comportement d'un circuit RLC série soumis à une tension sinusoïdale d'entrée e(t) , le signal de
sortie s(t) est pris aux bornes du condensateur:
Figure 22 - Circuit RLC série
Le diviseur de tension (ou la loi des mailles) en régime sinusoïdal permet d'écrire :
jC ω 1 1
S = E = E = E (31)
−
− 1 −
− 2 −
− 1 R −
−
jRC ω − LC ω + 1
2
R + jLω + − ω + j ω
jC ω LC L
1 R
On pose ω
2
0
= la pulsation propre d'oscillation du système et λ = le coefficient d'amortissement, la
LC 2L
fonction de transfert s'écrit:
S 1
H (j ω) = −
− = (32)
−
− E 2 2
(ω − ω ) + j2λω
−
− 0
On retrouve la même fonction de transfert qu'en mécanique par analogie électromécanique.
6. Etude approfondie des filtres en électrocinétique
6.1 Notion de quadripôle
Les filtres que nous allons étudier pourront être considérer comme des quadripôles linéaires:
\item on leur applique une tension d'entrée, souvent par leur connexion avec un générateur~;
ils délivrent une tension de sortie entre deux points, qui pourra être reliée à une charge.
Figure 23 - Notion de quadripôle
On notera que ce quadripôle sera considéré comme linéaire si tous ses composants sont linéaires (leur
caractéristique U = f (I ) est une droite).
6.2 Gain, diagramme de Bode, bande passante
6.2.1 Gain en décibels
Cette nouvelle grandeur va permettre de quantifier l'amplification du montage. Comme celle-ci peut être
importante, on préfère utiliser une grandeur logarithmique appelé gain en tension et exprimée en décibels (dB).
Ce gain est défini par:
S
GdB = 20 log(|H (jω)|) = 20 log( ) (33)
E
où |H (jω)| est l'amplification de tension, E et S sont les amplitudes réelles des signaux e(t) et s(t).
– –
6.2.2 Diagramme de Bode
Comme nous l'avons dit précédemment, l'intérêt d'un filtre est de pouvoir sélectionner, parmi la multitude de
fréquences que comporte un signal d'entrée, une bande de fréquence choisie.
Ainsi, il paraît naturel d'étudier le comportement de ces filtres en fonction de la fréquence, donc de tracer l'allure
de leur fonction de transfert en fonction de celle-ci.
Ce travail donne naissance au diagramme de Bode qui est constitué de deux graphiques:
Un graphique représentant le gain en décibels en fonction de la pulsation avec une échelle
logarithmique;
Un graphique représentant la phase en fonction de la pulsation avec une échelle logarithmique.
6.2.3 Bande passante et fréquences de coupure
Définition
La bande passante est la bande de fréquence qu'un filtre va laisser passer, pour laquelle l'amplification est bonne.
En dehors de celle-ci, les signaux sont très atténués.
Obtention
La bande passante est l'intervalle de fréquence compris entre deux fréquences appelées fréquences de coupure.
Ces fréquences de coupure sont définies par les fréquences qui vérifient :
H max
GdB = GdBmax − 3dB ou H = (34)
–
√2
Figure 24 - Exemple de bande passante sur un diagramme de Bode en gain
Remarques
Dans le cas où il n'y a qu'une fréquence de coupure, deux cas se distinguent :
Si la seule fréquence de coupure qui existe est basse f , alors la bande passante n'est pas définie; c1
Si la seule fréquence de coupure est haute f , la bande passante est définie par l'intervalle [0 , f ]. c2 c2
6.3 Généralité sur l'étude de différents filtres
Suivant l'allure de du diagramme de Bode en gain, c'est à dire la courbe G en fonction de la fréquence f , on
donne un nom au quadripôle. On distingue 4 circuits classiques :
Figure 25 - Les différents types de filtre
Lorsque le signal d'entrée est périodique mais non sinusoïdal, on étudie la façon dont chaque harmonique est
atténué et déphasé. On obtient à la sortie, un signal de même fréquence mais de forme différente. L'analyse
harmonique des signaux en entrée et en sortie permet d'obtenir une information sur la réponse fréquentielle du
filtre. En effet, si la tension d'entrée s'écrit
∞
e(t) = a 0 + ∑ cn e cos(2πnf t + φ n ) (35)
n=1
où les c sont les amplitudes des harmonique issus de la décomposition de Fourier du signal d'entrée, on obtient
n e
en sortie :
∞
s(t) = G(0) × a 0 + ∑ G(fn ) × cn e cos(2πnf t + φ n + ϕ(fn )) (36)
n=1
G(fn ) représente l'atténuation, ϕ(f n) le déphasage.
Il est donc possible de remonter à la réponse fréquentielle du filtre à partir des coefficients de Fourier des signaux
en entrée et en sortie puisque
cn s = G(fn ) cn e (37)
6.4 Étude d'un filtre passe-bas du premier ordre
6.4.1 Présentation
Le filtre est composé d'un conducteur ohmique et d'un condensateur comme le montre le montage ci-contre.
Ce filtre est appelé filtre du premier ordre car l'équation différentielle qui régit ce système est du premier ordre
(voir cours d'électrocinétique de première année).
Figure 26 - Filtre passe-bas du premier ordre
Aussi, on appellera ce filtre un filtre passif car ses composants n'apportent pas d'énergie au système. A contrario,
les filtres basés sur des amplificateurs opérationnels (A.L.I pour amplificateur linéaire intégré), alimentés par une
source extérieure, permettent un gain énergétique.
Remarque
On ne va s'intéresser ici qu'aux fonctions de transfert intrinsèque des filtres, c'est à dire que l'on considère que
même s'il y a une charge reliée au filtre (branchée en dérivation sur le condensateur), celle-ci est d'impédance
infinie si bien que la résistance et le condensateur du filtre peuvent être considérés comme branchés en série.}
6.4.2 Étude rapide
Nous connaissons le comportement en fréquence d'un condensateur. Cela nous permet de faire une étude rapide de
ce filtre et de le catégoriser dans les filtres passe-bas. En effet :
Lorsque la fréquence (ou la pulsation) est basse, l'impédance du condensateur qui a pour expression
1
ZC =
−
−
tend vers l'infini, le condensateur se comporte alors comme un interrupteur ouvert :
jC ω
La tension s(t) est égale à la tension e(t) : les basses fréquences sont transmises.
– –
Lorsque la fréquence (ou la pulsation) est haute, l'impédance du condensateur tend vers 0, le condensateur
se comporte comme un interrupteur fermé :
La tension –
s (t) est nulle (tension aux bornes d'un fil) : les hautes fréquences sont atténuées.
6.4.3 Fonction de transfert
En utilisant le diviseur de tension, on établit que :
ZC 1
−
−−
H (jω) = = (38)
−
− ZC + ZR 1 + jRC ω
−
−− −
−−
L'ordre du filtre est aussi déterminé par l'ordre en jω du polynôme du dénominateur de la fonction de transfert :
ici, il s'agit d'un premier ordre.
6.4.4 Forme canonique de la fonction de transfert
Pour pouvoir l'écrire, il faut définir quelques grandeurs :
Amplification en tension
On peut obtenir la fonction amplification de tension en prenant le module de la fonction de transfert :
1
|H (jω)| = (39)
−−−−−−−−−−2
√1 + (RC ω)
Fonction de transfert statique
La fonction de transfert statique, notée H et appelée amplification statique, correspond à lim 0 x→0 H (j ω) :
H0 = 1 (40)
Pulsation de coupure et bande passante
1 1
La pulsation de coupure correspond à la pulsation pour laquelle |H (jωC )| =
–
. On obtient ωC = . La
√2 RC
bande passante est donc [0,ω ]. C
Équation canonique de la fonction de transfert
ω
On fait intervenir la fonction statique et la variable réduite x = ce qui nous permet d'obtenir :
ωC
H0 ω
H (jx) = avec x = (41)
−
− 1 + jx ωC
Cette expression est générale pour les filtres passe-bas du premier ordre.
6.4.5 Diagramme de Bode
L'expression canonique de la fonction de transfert va nous permettre une étude plus aisée afin d'établir le
diagramme de Bode.
Cherchons le comportement asymptotique de la fonction de transfert complexe, pour avoir directement accès à
celui de G et ϕ : dB
On travaille sur la fonction :
H0
H (j x) =
−
− 1 + jx
GdB → 20 log H 0 = G0 = 0
Lorsque x → 0 ,−
H (j x)
−
→ H0 ⟹ {
ϕ → Arg(H 0 ) = 0
la première asymptote a pour équation G dB = 0 pour le gain et 0 pour la phase ;
GdB → G0 − 20 log x
j H0
Lorsque x → ∞ ou x ≫ 1 ,−
H (j x)
−
→ − ⟹ { j H0 π
x ϕ → Arg(− ) = −
x 2
π
on dit que la deuxième asymptote est une droite de pente -20 dB/décade pour le gain et − pour la phase
2
;
Enfin, on remarque que les deux asymptotes du gain se croisent en x = 1 .
Étude du gain
On a :
H0
GdB = 20 log | H (jω)| = 20 log( ) (42)
−− −−−−−
√1 + x2
2
= 20 log H 0 − 10 log(1 + x ) (43)
2
= G0 − 10 log(1 + x ) (44)
On peut déjà noter que G dB est une fonction décroissante pour x ∈ [0, +∞[ , et qu'elle est maximum pour x = 0 .
Il faut regarder une dernière chose avant de tracer le diagramme de Bode en gain : la courbe est-elle en dessous ou
au dessus des asymptotes ?
Pour cela, trouvons le signe de :
1
GdB − G0 = GdB = 20 log( −−−−− ) < 0
√1 + x2
x
GdB − (G0 − 20 log x) = 20 log( ) < 0
−−−−−
√1 + x2
La courbe réelle sera donc toujours en dessous des asymptotes.
Figure 27 - Diagramme de Bode du gain d'un filtre passe-bas
>Compléments : expliquons la provenance de ce -20 dB/décade
Calculons la valeur de l'asymptote d'équation GdB = G0 − 20 log x , pour deux valeurs de pulsation : ω1 et
ω = 10 ω .
2 1
GdB (x1 ) = G0 − 20 log x1 (45)
GdB (x2 ) = G0 − 20 log x2 = G0 − 20 log x1 − 20 log 10 (46)
GdB (x2 ) − GdB (x1 ) = −20 dB (47)
Ainsi, lorsque la pulsation est multipliée par 10 (une décade), le gain diminue de 20 dB.
Étude de la phase
La phase est égale à l'argument de la fonction de transfert complexe :
ϕ(x) = Arg( H (jx)) = Arg(H 0 ) − Arg(1 + jx) (48)
−−
ϕ(x) = − arctan(x) (cos ϕ > 0 car Re(1 + jx) = 1 > 0) (49)
En effet, on rappelle que la tangente d'un angle correspond à deux valeurs d'angle θ et π − θ. Si le cos de l'angle
est positif, on prend la première valeur.
On a trouvé précédemment le comportement asymptotique du déphasage :
Lorsque x → 0 , ϕ(x) → 0 ;
Lorsque x → ∞, ϕ(x) → −π/2 ;
Lorsque x = 1 , ϕ = −π/4.
On peut alors le diagramme de Bode en phase :
Figure 28 - Diagramme de Bode en phase d'un filtre passe-bas
6.5 Étude d'un filtre passe-haut du premier ordre
En déroulant la même étude que précédemment sur le circuit suivant :
Figure 29 - Filtre passe-haut du premier ordre
C'est à dire en intervertissant résistance et condensateur, on montre que celui-ci est un filtre passe haut du
premier ordre.
En effet :
Si ω → 0 , −
Z
− C
→ ∞ , condensateur ⇔ interrupteur ouvert : s(t) = 0.
–
Si ω → ∞, − Z
− C
→ 0 , condensateur ⇔ interrupteur fermé : s (t) = e (t) . Les hautes fréquences sont
– –
conservées.
On obtient facilement la fonction de transfert suivante :
jx
H (jx) = H 0 (50)
−
− 1 + jx
ω 1
avec H 0 = 1, x = et ωC = (51)
ωC RC
Le gain est :
x
GdB = 20 log( (52)
−−−−− )
√1 + x2
La phase est :
π
ϕ(x) = − arctan x (53)
2
Figure 31 - Bode de la phase du filtre passe-
Figure 30 - Bode du gain du filtre passe-haut
haut
6.6 Remarque sur l'ordre des filtres
Si on souhaite davantage atténuer les hautes ou les basses fréquences avec des filtres passe-bas ou passe-haut, on
peut utiliser des filtres du deuxième ordre : les pentes du gain seront en -40 dB/décade.
6.7 Filtres passe-bas et passe-haut : application, le filtre ADSL
A l'époque où les maisons conservaient leur ligne téléphonique classique, il fallait faire passer dans les fils
téléphoniques les données du téléphone et les données d'internet. Pour cela, des bandes de fréquences distinctes
étaient choisies :
Le signal analogique du téléphone est affecté aux fréquences [0, 4kHz] ;
Le signal numérique d'internet aux fréquences [20 kHz, 1,1 MHz]
Figure 32 - Bandes de fréquences téléphone et internet
Il fallait donc placer un filtre ADSL sur la prise téléphonique murale, de ce filtre partait le câble permettant de
relier la box internet, puis on plaçait sa prise téléphonique classique sur le filtre :
Figure 33 - Principe du filtre ADSL
Le filtre ADSL est donc composé de deux filtres en parallèle, un filtre passe-bas permettant aux données
téléphoniques de transiter, un filtre passe-haut qui sélectionne les fréquences dédiées à internet :
6.8 Etude d'un filtre passe-bande
6.8.1 Fonction de transfert
Un filtre passe-bande peut être construit à partir d'un circuit RLC série en prenant la tension aux bornes de la
résistance :
Figure 34 - Filtre passe-bande
Le diviseur de tension permet d'obtenir la fonction de transfert : le diviseur de tension (ou la loi des mailles) en
régime sinusoïdal permet d'écrire :
R 1
s (t) = e (t) = e (t) (54)
– 1 – L 1 –
R + jLω + 1 + j ω +
jC ω R jRC ω
1
d'o ù H (jω) =
−
−
(55)
Lω 1
1 + j( − )
R RC ω
ω
La forme canonique s'obtient en faisant apparaître la fonction statique H 0 = 1 , la pulsation réduite x = et on
ω0
−−
1 L
introduit une nouvelle grandeur appelé facteur de qualité Q = √ .
R C
L Q 1
On a alors = et = Q ω0 . On obtient la fonction canonique suivante :
R ω0 RC
H0
H (jx) = (56)
−
−
1
1 + jQ (x − )
x
6.8.2 Etude du gain
H0
GdB = 20 log (57)
−−−−−−−−−−−−−−
2
1
√1 + Q2 (x − )
x
Etudions ces limites :
2
1
Le gain est alors maximum pour (x − ) = 0 soit x = 1 ⟺ ω = ω0 et G dB max = 0 ;
x
Si x → 0 alors G dB → −∞ ;
Si x → ∞ alors G dB → −∞ ;
Etudions ces asymptotes :
H0
Si x ≪ 1 alors G dB → 20 log x + 20 log ( ) : asymptote à +20 dB/décade;
Q
H0
Si x ≫ 1 alors G dB → −20 log x + 20 log ( ) : asymptote à -20 dB/décade;
Q
H0
Les deux asymptotes se coupent en ω = ω0 (x = 1 ) pour une valeur de G dB = 20 log ( ) .
Q
Alors :
Si Q < 1 , la courbe sera au dessus des asymptotes (G dB = G0 − 20 log Q );
Si Q > 1 , la courbe sera au dessous des asymptotes.
Figure 35 - Diagramme de Bode en gain du passe-bande
Pulsation de coupure et bande passante
H max
On cherche les pulsations ω et ω qui vérifient H (j ω 1 2 1) = H (j ω2 ) =
–
:
√2
2
H max H0 2
1
= ⟺ 1 + Q (x − ) = 2 (58)
– −−−−−−−−−−−−−−
√2 2 x
1
√1 + Q2 (x − )
x
Soit :
2
1 1 1 1 1 1
(x − ) = ⟺ [(x − ) + ] [(x − ) − ] = 0 (59)
2
x Q x Q x Q
On a donc deux équations du second degré à résoudre. Voici la résolution de la première :
1 1 2
x
(x − ) + = 0 ⟺ x + − 1 = 0 (60)
x Q Q
1 1
Δ = − 4 × 1 × (−1) = 4 (1 + ) > 0 (61)
2 2
Q 4Q
−−−−−−−−−−
1 1
x = − ± √(1 + ) on ne peut garder que la solution positive (62)
2
2Q 4Q
La résolution de la deuxième donne :
−−−−−−−−−−
1 1
x = + √(1 + ) (63)
2
2Q 4Q
Les pulsations de coupure et donc la bande passante dépendent du facteur de qualité :
−−−−−−−−−− −−−−−−−−−−
1 1 1 1
ω1 = ω0 (− + √(1 + )) ω2 = ω0 ( + √(1 + )) (64)
2 2
2Q 4Q 2Q 4Q
ω0
Δω = ω2 − ω1 = (65)
Q
Figure 36 - Passe-bande et bande passante
On voit que plus le facteur de qualité du filtre passe-bande est grand, plus le filtre est sélectif, la bande passante
est plus petite.
6.8.3 Etude de la phase
⎛ ⎞
⎜ H0 ⎟ 1
ϕ = Arg( H (jx)) = Arg ⎜ ⎟ = −Arg (1 + jQ (x − )) si H 0 > 0 (66)
−− ⎜ ⎟ x
1
⎝ 1 + jQ (x − )⎠
x
On peut étudier les limites de la phase à partir de la fonction de transfert. En effet :
⎧ 1 j π
⎪
⎪ Si x → 0, H (jx) ≃ = x ; H imaginaire pur >0 ⟹ ϕ =
⎪
⎪ −
− −
−
⎪ 1 Q 2
⎪
⎪
⎪ j Q (− )
⎪
⎪ x
⎨ 1 −j π (67)
⎪ Si x → ∞, H (jx) ≃ = ; H imaginaire pur < 0 ⟹ ϕ = −
⎪ −− jQx Qx −
− 2
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩
⎪
Si x = 1, H (jx) = 1 ⟹ ϕ = 0
−
−
Etudions la tangente et le cosinus :
⎧ 1
⎪
⎪
⎪ tan (−ϕ) = Q (x − )
⎪
⎪ x
⎪
⎪
1
⎨ cos (−ϕ) = cos ϕ = > 0 (68)
−−−−−−−−−−−−−−−−−
⎪
⎪ 2
⎪
⎪ 1
⎪
⎪ √1 + (Q (x − ))
⎩
⎪
x
Finalement :
1
ϕ(x) = −arctan (Q (x − )) (69)
x
Figure 37 - Diagramme de Bode en phase d'un filtre passe-bande
6.8.4 Application : traitement de fichiers sonores
Dans le traitement du son, un filtre passe-bande permet de sélectionner une certaine bande de fréquences utiles,
les autres étant atténuées.
Un logiciel, comme AVS audio editor, propose de traitement un son avec différents filtres, comme un filtre passe-
bande : Filtre passe bande sous AVS Audio Editor.
On retrouve bien sûr ce type de filtres dans des logiciel libre type Audacity : l'effet wahwah de guitare est créé en
utilisant un filtre passe-bande réglable ...
7. Références
Fonction de transfert, filtrage :
http://physiquepcsimoreggia.hautetfort.com/media/00/01/1901656848.pdf
http://www.seigne.free.fr/Cours/AnaFourier.pdf>
Transformée de Fourier et train d'onde : https://www.silicium628.fr/cours/tr_fourier/page3.php
Fourier :
http://ressource.electron.free.fr/bts/cours/Signal.pdf
http://perso.univ-lemans.fr/~berger/Signal_MP2/TFourier/co/TFUsuelle.ht
https://www.youtube.com/watch?v=4XCSoFLFLNE
Filtre ADSL : http://olivier.granier.free.fr/MOOC/co/filtrage-elec-ordre-1_1.html
Wikipédia, diagramme de Bode et filtre passe-bande :
https://fr.wikipedia.org/wiki/Diagramme_de_Bode#Passe-haut
https://fr.wikipedia.org/wiki/Filtre_passe-bande
Filtre passe-bande : http://mawy33.free.fr/cours%20sup/32-
100%20%C3%A9l%C3%A9ctrocin%C3%A9tique%20RLC%20sinusoidal.pdf
Filtres passifs : http://lyceehugobesancon.org/btssn/IMG/pdf/Filtres_passifs.pdf
Lecture d'une courbe fréquentielle: https://www.lesnumeriques.com/audio/tuto-audio-comment-lire-courbe-
reponse-frequentielle-a3561.html
Accueil Plan du site Contact A propos Politique de confidentialité
Physagreg 2003-2023 : créé et administré par Julien Geandrot, professeur agrégé (PRAG) de physique à l'ENSCR
Dernière mise à jour : 22 avril 2023
Vous aimerez peut-être aussi
- Deur2015 16Document1 pageDeur2015 16fatelargoPas encore d'évaluation
- Feuilles de Travail MsaDocument20 pagesFeuilles de Travail Msaapi-394569972Pas encore d'évaluation
- Ems Kda Dce Det 020 Goe S N 001 ADocument1 pageEms Kda Dce Det 020 Goe S N 001 Aatif.fatimazahra17Pas encore d'évaluation
- Mon Classeur de PPDocument16 pagesMon Classeur de PPOuattaraPas encore d'évaluation
- Ventil Ho DemoDocument25 pagesVentil Ho Demonicolas.guilbert3341Pas encore d'évaluation
- Statistik-Aa-Af-Am - 2019 2Document12 pagesStatistik-Aa-Af-Am - 2019 2Filipe CorreiaPas encore d'évaluation
- (Superpartituras - Com.br) - Autumn-Leaves Piano e MelodiaDocument2 pages(Superpartituras - Com.br) - Autumn-Leaves Piano e MelodiaLucianno de BarrosPas encore d'évaluation
- Friday On My Mind TromboneDocument2 pagesFriday On My Mind TromboneMPas encore d'évaluation
- Pratique Conjugaison B1 - B2Document24 pagesPratique Conjugaison B1 - B2Tony25% (4)
- ASS1Document1 pageASS1Souha Toumi VbPas encore d'évaluation
- Mercado Capullanas - PiuraDocument1 pageMercado Capullanas - Piurarg071295Pas encore d'évaluation
- Série de Révision Au2ème Contrôle, Semestre 2 3AC SVTDocument3 pagesSérie de Révision Au2ème Contrôle, Semestre 2 3AC SVThajar AkharrazPas encore d'évaluation
- LV845000 DATASHEET MA FR-FRDocument1 pageLV845000 DATASHEET MA FR-FRMohamed MOUCHRIFPas encore d'évaluation
- 23 - Nesta Hora de Clamor (Coro)Document3 pages23 - Nesta Hora de Clamor (Coro)Milane TavaresPas encore d'évaluation
- Projet de Progression 3e As LP Et LEDocument7 pagesProjet de Progression 3e As LP Et LEMehdi AlpesPas encore d'évaluation
- Plan Mobilier - Exe-Ocp 2 EtageDocument1 pagePlan Mobilier - Exe-Ocp 2 Etagekhalid.chinoisPas encore d'évaluation
- John Williams-Return of The Jedi-SheetsDaily PDFDocument68 pagesJohn Williams-Return of The Jedi-SheetsDaily PDFwill mortimer75% (4)
- Suite KieuDocument15 pagesSuite KieuChad HernandezPas encore d'évaluation
- Sungha Jung - SevenDocument5 pagesSungha Jung - Sevensiwoo100114Pas encore d'évaluation
- Sujet Premiere Francais Concours General 2019Document2 pagesSujet Premiere Francais Concours General 2019Seydou sanéPas encore d'évaluation
- Prelude C Sharp Minor - RachmaninoffDocument4 pagesPrelude C Sharp Minor - RachmaninoffH_vard100% (10)
- M-304 - Distribution - Sous-Sol 1 Section 1Document1 pageM-304 - Distribution - Sous-Sol 1 Section 1buisson-21Pas encore d'évaluation
- Enyo NamDocument1 pageEnyo NamHOLY SPIRIT REVELATIONPas encore d'évaluation
- Duo de Fleurs DelibesDocument3 pagesDuo de Fleurs DelibesAulde de BrionPas encore d'évaluation
- PlansDocument5 pagesPlansAHAHHAPas encore d'évaluation
- Aide Evaluation Risque Chimique CLPDocument7 pagesAide Evaluation Risque Chimique CLPstagfire17Pas encore d'évaluation
- Pilares 01Document1 pagePilares 01MatheusVinniciusPas encore d'évaluation
- Prelude No. 4 in E Minor Op. 28 - Frederic Chopin PDFDocument1 pagePrelude No. 4 in E Minor Op. 28 - Frederic Chopin PDFMirko PaoloPas encore d'évaluation
- R Accord EmentDocument1 pageR Accord Ementkhlifa mohamedPas encore d'évaluation
- Arq 03 - Planta Trazado Mob. e Ilu-Arq 03Document1 pageArq 03 - Planta Trazado Mob. e Ilu-Arq 03Fabrizio MartinicPas encore d'évaluation
- Sta 304Document1 pageSta 304Salvador FayssalPas encore d'évaluation
- Calipso (Català)Document4 pagesCalipso (Català)Oliver Carrasco Sellao100% (1)
- Quartet TDocument3 pagesQuartet Tnadim_tabassum9760Pas encore d'évaluation
- GEA Page: 1/1: (Hors Scope ENGTP)Document1 pageGEA Page: 1/1: (Hors Scope ENGTP)hamzaPas encore d'évaluation
- M-314 - DISTRIBUTION - 4e ëTAGE SECTION 1Document1 pageM-314 - DISTRIBUTION - 4e ëTAGE SECTION 1buisson-21Pas encore d'évaluation
- R57 - 8A Plan Armare Inferioara Placa Cota +17.30, +20.20, +23.10Document1 pageR57 - 8A Plan Armare Inferioara Placa Cota +17.30, +20.20, +23.10sephoraengPas encore d'évaluation
- Bergerac - SDIS - 2023-02-28-ST05 - Ind.0 Coupes Et Détails 2s2Document1 pageBergerac - SDIS - 2023-02-28-ST05 - Ind.0 Coupes Et Détails 2s2louis.jailletPas encore d'évaluation
- DCL FLE 0513 03 Dossier Travail Candidat 318656Document12 pagesDCL FLE 0513 03 Dossier Travail Candidat 318656Joseph StPas encore d'évaluation
- Hark! The Herald Angels SingDocument1 pageHark! The Herald Angels SingNathanië groot NibbelinkPas encore d'évaluation
- نموذج عقد تقديم خدمات v0.3 - PDFDocument1 pageنموذج عقد تقديم خدمات v0.3 - PDFMustaPas encore d'évaluation
- 11 Scholem Sol SajnDocument2 pages11 Scholem Sol SajnJutta Von KospothPas encore d'évaluation
- M-316 - DISTRIBUTION - 5e ëTAGE at 8e ëTAGE SECTION 1Document1 pageM-316 - DISTRIBUTION - 5e ëTAGE at 8e ëTAGE SECTION 1buisson-21Pas encore d'évaluation
- Observacion: CircuitosDocument1 pageObservacion: CircuitosKEIDTLYN JOVANEPas encore d'évaluation
- Motore Pro2003Document34 pagesMotore Pro2003brunonenolisciPas encore d'évaluation
- FERIA DE JULIO, Guión COMPLETODocument20 pagesFERIA DE JULIO, Guión COMPLETOMaria De Fátima DiasPas encore d'évaluation
- Partitura - Chega de Saudade (Sax Alto (Eb)Document2 pagesPartitura - Chega de Saudade (Sax Alto (Eb)kadjaterrezaPas encore d'évaluation
- Jongen Flute SonataDocument69 pagesJongen Flute SonataPhilippe PeetermansPas encore d'évaluation
- Ronde No 1 Pour QuoyDocument14 pagesRonde No 1 Pour QuoyAngelica ArrutiPas encore d'évaluation
- Vitorias DOM - V1e2Document1 pageVitorias DOM - V1e2Enzo FontesPas encore d'évaluation
- Cahier Des Normes - ADALIADocument12 pagesCahier Des Normes - ADALIAMendie RamarosonPas encore d'évaluation
- Ensemble - Goldman - SATB Et PianoDocument7 pagesEnsemble - Goldman - SATB Et PianoSyssie15Pas encore d'évaluation
- تقرير تربص تخصص عامل في الميكرو معلوماتيةDocument49 pagesتقرير تربص تخصص عامل في الميكرو معلوماتيةDjedoui YoucefPas encore d'évaluation
- Psa To Basecamp 2Document1 pagePsa To Basecamp 2Hen Drix LevaPas encore d'évaluation
- Estructural 1PDocument1 pageEstructural 1PRoger MedranoPas encore d'évaluation
- Tanz Der Vampire Vienna 2011Document263 pagesTanz Der Vampire Vienna 2011NiskaPas encore d'évaluation
- 10-Plan de Revêtement Et Drainage Du Terre PleinDocument1 page10-Plan de Revêtement Et Drainage Du Terre PleinKina BouhafsPas encore d'évaluation
- MEncoder MAN FRDocument85 pagesMEncoder MAN FREminoMeneko100% (2)
- Yx 10 SPDocument12 pagesYx 10 SPTenny SupPas encore d'évaluation
- Exo Suppl TDS 2018Document3 pagesExo Suppl TDS 2018Miss AmericanaPas encore d'évaluation
- TD I303a L3 E3A Révisions. Corrigã©sDocument52 pagesTD I303a L3 E3A Révisions. Corrigã©sZineddine TeraiPas encore d'évaluation
- Mon RapportDocument8 pagesMon RapportSkaists AssiaPas encore d'évaluation
- 04 Conception Filtres ElectroniqueDocument11 pages04 Conception Filtres ElectroniqueJerson AngelPas encore d'évaluation
- Mesures ImpedancesDocument83 pagesMesures ImpedancesdudulemarcPas encore d'évaluation
- Mode D Emploi Garrett GTI 2500Document9 pagesMode D Emploi Garrett GTI 2500ppjpPas encore d'évaluation
- Cours SpiceDocument75 pagesCours SpicePipipriso NsankonPas encore d'évaluation
- Rapport TPDocument12 pagesRapport TPoumaimaPas encore d'évaluation
- Agreg Int Sii 2 2022Document51 pagesAgreg Int Sii 2 2022claretPas encore d'évaluation
- Filtrage Numerique 0Document28 pagesFiltrage Numerique 0Mohamed ElankoudPas encore d'évaluation
- Cours Tous Les FiltresDocument11 pagesCours Tous Les FiltresnawarajarrayaPas encore d'évaluation
- Specialite de FiltrageDocument53 pagesSpecialite de FiltrageStaint PATRICKPas encore d'évaluation
- Cours Filtres 1Document33 pagesCours Filtres 1medlkPas encore d'évaluation
- SpectresDocument43 pagesSpectresayman lamzouriPas encore d'évaluation
- A.1.1 Polycopié Exercices Corrigés Traitement Numérique Du SignalDocument41 pagesA.1.1 Polycopié Exercices Corrigés Traitement Numérique Du SignalFatima zahra YaacobiPas encore d'évaluation
- DSPDocument130 pagesDSPAYOUB AIEDPas encore d'évaluation
- Présentation Traitement D'image MatlabDocument35 pagesPrésentation Traitement D'image MatlabHamza Maître100% (2)
- Généralités Sur Les Signaux Et Supports TXDocument26 pagesGénéralités Sur Les Signaux Et Supports TXthmindjos_918783995Pas encore d'évaluation
- TP5 Filtrage Analogique2007Document5 pagesTP5 Filtrage Analogique2007محمد علي حجاجيPas encore d'évaluation
- TP Capteur Acceleration & DeplacementDocument9 pagesTP Capteur Acceleration & Deplacementcopch2020Pas encore d'évaluation
- Manual Kaiweets 206DDocument18 pagesManual Kaiweets 206Dedi susantoPas encore d'évaluation
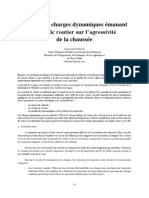
- Charges Dynamiques ChausseeDocument13 pagesCharges Dynamiques ChausseeNick Jordan KEMBOU WOUNTSAPas encore d'évaluation
- Travaux Pratiques 2 Programmation DSPDocument3 pagesTravaux Pratiques 2 Programmation DSPEmna SaadiPas encore d'évaluation
- Power PointDocument16 pagesPower Pointtbfati100% (1)
- Techniques de MultiplexageDocument8 pagesTechniques de MultiplexageNadia AitPas encore d'évaluation
- CoursfiltresDocument21 pagesCoursfiltresRacem LoukilPas encore d'évaluation