Vous aimerez peut-être aussi
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Compte Rendu TP4Document24 pagesCompte Rendu TP4Méd El Yazid100% (1)
- Contrôle Par RessuageDocument36 pagesContrôle Par Ressuagefathi100% (1)
- Le Praticien Physiques PDFDocument370 pagesLe Praticien Physiques PDFSeydou Coulibaly100% (3)
- Histoire-Géographie CE1Document6 pagesHistoire-Géographie CE1Rocha Osman HO YhatPas encore d'évaluation
- Fiche4 FourierDocument5 pagesFiche4 FouriermuzzolonPas encore d'évaluation
- Bruit-Copy1Document52 pagesBruit-Copy1Hafssa AIT AMARPas encore d'évaluation
- Cours Electronique Numerique 2ieDocument13 pagesCours Electronique Numerique 2iesdpyzzpf97Pas encore d'évaluation
- Optique ENSA2022 Séance 10Document13 pagesOptique ENSA2022 Séance 10Houda OuisraniPas encore d'évaluation
- Ern KLDocument90 pagesErn KLYoussef Natij100% (1)
- AdaptatifDocument22 pagesAdaptatifAli Sfaïhi100% (1)
- Solution Des Exercices C/C++Document135 pagesSolution Des Exercices C/C++Wassim NostraPas encore d'évaluation
- TP1 AutomatiqueDocument14 pagesTP1 AutomatiqueM'tıraouı BadrPas encore d'évaluation
- TP Phys 4 Caractere AleatoireDocument6 pagesTP Phys 4 Caractere Aleatoireouledlaaouj771737Pas encore d'évaluation
- Solution D'exercices Du CDocument182 pagesSolution D'exercices Du CIhsan MokhlissePas encore d'évaluation
- SMP S6 EII TDS El Amraoui Chapitre 5Document16 pagesSMP S6 EII TDS El Amraoui Chapitre 5Laila RaouanePas encore d'évaluation
- Les Algorithmes D'approximation PDFDocument7 pagesLes Algorithmes D'approximation PDFbouazra moezPas encore d'évaluation
- Chapitre EchantillonnageDocument15 pagesChapitre EchantillonnageEya OuerghemmiPas encore d'évaluation
- TP IdentifDocument33 pagesTP IdentifRobert CooperPas encore d'évaluation
- DEVOIR (AKOUEHOU, BONOU Habib, DANSOU Giovanni, ZINSOU Karl)Document14 pagesDEVOIR (AKOUEHOU, BONOU Habib, DANSOU Giovanni, ZINSOU Karl)dfe100% (1)
- TSN Chapitre 1. La Transformation de Fourrier DiscrèteDocument21 pagesTSN Chapitre 1. La Transformation de Fourrier DiscrèteDěmøïšěllë RãnPas encore d'évaluation
- TP TSDocument3 pagesTP TSNassim KahouadjiPas encore d'évaluation
- Chapitre 4 - TSDocument7 pagesChapitre 4 - TSمنوعات dzPas encore d'évaluation
- Série TP Epa Phot AP v1Document14 pagesSérie TP Epa Phot AP v1Koupable UpPas encore d'évaluation
- Échantillonnage Et Reconstruction D'un Signal PériodiqueDocument13 pagesÉchantillonnage Et Reconstruction D'un Signal PériodiqueRomaysa jijiPas encore d'évaluation
- TP 04 DemodulationDocument10 pagesTP 04 DemodulationAyoub ZAHRAOUIPas encore d'évaluation
- Chapter2 Sampling Reconstruction TempDocument11 pagesChapter2 Sampling Reconstruction TempahmedPas encore d'évaluation
- Le Langage C Pour ArduinoDocument4 pagesLe Langage C Pour ArduinoAchref MmaPas encore d'évaluation
- Cours ET ProgrammationDocument11 pagesCours ET ProgrammationKevin TatsaaPas encore d'évaluation
- Polycopié TP Signal 22 23 PDFDocument10 pagesPolycopié TP Signal 22 23 PDFWissal SachaPas encore d'évaluation
- Chapitre 1 - Introduction À L'algorithmique PDFDocument8 pagesChapitre 1 - Introduction À L'algorithmique PDFPape Ballé Ndiaye100% (1)
- Exercices Revision 1-5Document4 pagesExercices Revision 1-5Martinien Andrey MehounPas encore d'évaluation
- TD5 CapteursxDocument5 pagesTD5 CapteursxIbrahim Herraz100% (1)
- Projet Bernoulli: Application Au Calcul de Perte de ChargeDocument5 pagesProjet Bernoulli: Application Au Calcul de Perte de ChargeEvan's ZiguiPas encore d'évaluation
- Asservissement Échantillonné PDFDocument79 pagesAsservissement Échantillonné PDFFabrice FotsoPas encore d'évaluation
- TP MN La Puce Partie InstationnaireDocument9 pagesTP MN La Puce Partie InstationnaireILHEMPas encore d'évaluation
- Chapitre 1Document55 pagesChapitre 1Hiba TANTAOUIPas encore d'évaluation
- Cours 1 Li 5Document43 pagesCours 1 Li 5Karam Nirmine El HatimiPas encore d'évaluation
- Support TS - CH4 - L2etL3 ESATIC 2019 PDFDocument44 pagesSupport TS - CH4 - L2etL3 ESATIC 2019 PDFFourier Cédric DanPas encore d'évaluation
- Travaux Dirige S TSDocument13 pagesTravaux Dirige S TSDhaouadi AymenPas encore d'évaluation
- ES101Document14 pagesES101acicPas encore d'évaluation
- Matlab - TP8 - Traitement de SignalDocument4 pagesMatlab - TP8 - Traitement de SignalOUMAIMA BAHAFIDPas encore d'évaluation
- Cours Télécom Signal Et Processus AléatoiresDocument20 pagesCours Télécom Signal Et Processus AléatoiresPaypal RezultPas encore d'évaluation
- For While If End: For K Val - Init: Pas: Val - Fin Liste Des Instructions End + MDocument6 pagesFor While If End: For K Val - Init: Pas: Val - Fin Liste Des Instructions End + MYoucef Abdellah Ayoub LaouidPas encore d'évaluation
- Rapport Soumia Abdellaoui Ci1Document29 pagesRapport Soumia Abdellaoui Ci1soumia abdellaouiPas encore d'évaluation
- TD Chapitre 2 (Etudiants)Document24 pagesTD Chapitre 2 (Etudiants)Laila BelPas encore d'évaluation
- Tp2 Signal Fatiha HanaeDocument17 pagesTp2 Signal Fatiha HanaeHanae MenounyPas encore d'évaluation
- L3 Instru Séance2 Impulsionnel RC - Finale - CorrectionDocument5 pagesL3 Instru Séance2 Impulsionnel RC - Finale - CorrectionarfPas encore d'évaluation
- Chapitre 2 - 2023Document19 pagesChapitre 2 - 2023MOUSSA Mamane RabiouPas encore d'évaluation
- Element FiniesDocument14 pagesElement Finiesoussama haj mansourPas encore d'évaluation
- TD 1Document1 pageTD 1Mohamed Khalil ElkrichiPas encore d'évaluation
- TD 1 TDSNDocument2 pagesTD 1 TDSNAbderrazak MAARADPas encore d'évaluation
- Td5 Lois Statistique Loi BinomialeDocument12 pagesTd5 Lois Statistique Loi BinomialeAyoub HwitéPas encore d'évaluation
- Cours Systeme Asservi NumeriqueDocument17 pagesCours Systeme Asservi Numeriquelange681100% (3)
- Chapitre 2Document5 pagesChapitre 2mehdi benounaPas encore d'évaluation
- I. But de La Manipulation: 1. Convolution AnalogiqueDocument4 pagesI. But de La Manipulation: 1. Convolution AnalogiquemouadPas encore d'évaluation
- Traitement Num Erique Du Signal Travaux Pratiques (7h) Synth'ese, Analyse Et Filtrage D'un Signal Audio Num EriqueDocument9 pagesTraitement Num Erique Du Signal Travaux Pratiques (7h) Synth'ese, Analyse Et Filtrage D'un Signal Audio Num Eriquekheira djelloulPas encore d'évaluation
- Capture D'écran . 2024-04-05 À 08.25.47Document5 pagesCapture D'écran . 2024-04-05 À 08.25.47sdpyzzpf97Pas encore d'évaluation
- Communications Num Riques Avanc Es. Cours 1Document19 pagesCommunications Num Riques Avanc Es. Cours 1Ikbel BakloutiPas encore d'évaluation
- Telemetre Arduino LabviewDocument10 pagesTelemetre Arduino LabviewJavier RodriguezPas encore d'évaluation
- Suppression des lignes cachées: Dévoiler l'invisible : les secrets de la vision par ordinateurD'EverandSuppression des lignes cachées: Dévoiler l'invisible : les secrets de la vision par ordinateurPas encore d'évaluation
- LagrangeDocument2 pagesLagrangeselmaaaab2703Pas encore d'évaluation
- PB RecDocument2 pagesPB Recselmaaaab2703Pas encore d'évaluation
- Exercice (Etude D'Un Asservissement Échantillonné) .: NT CNTMNTDocument2 pagesExercice (Etude D'Un Asservissement Échantillonné) .: NT CNTMNTselmaaaab2703Pas encore d'évaluation
- Seecs S2 Exam 1Document1 pageSeecs S2 Exam 1selmaaaab2703Pas encore d'évaluation
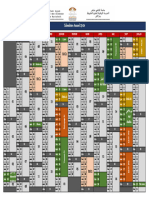
- Calendrier 23-24Document1 pageCalendrier 23-24selmaaaab2703Pas encore d'évaluation
- ObjetDocument1 pageObjetselmaaaab2703Pas encore d'évaluation
- Projet de La DrogueDocument5 pagesProjet de La Drogueselmaaaab2703Pas encore d'évaluation
- Maintenance 26Document48 pagesMaintenance 26Paméla HakmiPas encore d'évaluation
- Note D'expertise Technique - Dégâts Immobiliers Par Infiltration D'eau À Travers Une StructureDocument21 pagesNote D'expertise Technique - Dégâts Immobiliers Par Infiltration D'eau À Travers Une StructureZITه BBOYPas encore d'évaluation
- Université Privée de SousseDocument49 pagesUniversité Privée de SousseAnouar AleyaPas encore d'évaluation
- Chapitre5 PDFDocument26 pagesChapitre5 PDFlangagecccPas encore d'évaluation
- 06 FormationdelurineDocument1 page06 FormationdelurinePape SabalyPas encore d'évaluation
- Oral 2018Document23 pagesOral 2018anoiriPas encore d'évaluation
- Ana 36Document17 pagesAna 36Smail RCAPas encore d'évaluation
- Fiche D'evaluation Des Risques Et Impacts E&S SITE de Depot de Terre Vegetale ADJAMENE - 1Document5 pagesFiche D'evaluation Des Risques Et Impacts E&S SITE de Depot de Terre Vegetale ADJAMENE - 1phillos prince sekaPas encore d'évaluation
- Extrait - Collège Médecine CardiovasculaireDocument8 pagesExtrait - Collège Médecine CardiovasculaireTheodoraPas encore d'évaluation
- Naturaliste Canadien - Vol - 136-3 - Ete - 2012-MinDocument106 pagesNaturaliste Canadien - Vol - 136-3 - Ete - 2012-MinwfkmplptbmfjtpxdtgPas encore d'évaluation
- Rapport de StageDocument58 pagesRapport de Stagenagnouma kamaraPas encore d'évaluation
- TB 22 Phylogenie FicheDocument18 pagesTB 22 Phylogenie Fichefadoulzerbo95Pas encore d'évaluation
- Partie VI Organisation Du Travail Dans L'entreprise PDFDocument6 pagesPartie VI Organisation Du Travail Dans L'entreprise PDFSaad Hakawi100% (3)
- Thème 5.3Document2 pagesThème 5.3MohammedPas encore d'évaluation
- Visiter Paris Par ArrondissementDocument2 pagesVisiter Paris Par ArrondissementRobert DesmaraisPas encore d'évaluation
- 05 Introduction A La Fonction ExponentielleDocument1 page05 Introduction A La Fonction ExponentielleKhawla WeseletiPas encore d'évaluation
- Controle D'alternateur TP 2Document3 pagesControle D'alternateur TP 2youssef alaoui sossiPas encore d'évaluation
- Fiche Peda D Devoir 1bac 1Document2 pagesFiche Peda D Devoir 1bac 1harira50% (2)
- Guide Pratique Audit Fiche de LectureDocument6 pagesGuide Pratique Audit Fiche de LectureMounir ZakiPas encore d'évaluation
- Catalogue AFK ProDocument15 pagesCatalogue AFK Proramsi_softPas encore d'évaluation
- Esprit Bonsaï 2022-08-09Document84 pagesEsprit Bonsaï 2022-08-09onerPas encore d'évaluation
- 2 CinématiqueDocument35 pages2 Cinématiquebig bossPas encore d'évaluation
- Présentation EAMDocument30 pagesPrésentation EAMNoureddine OUSMAILPas encore d'évaluation
- Mon Tfe Chapitre 3Document11 pagesMon Tfe Chapitre 3Magloire TshihilukaPas encore d'évaluation
- Algèbre1 230307Document26 pagesAlgèbre1 230307samandoulgoubenPas encore d'évaluation
- Aventure Mystérieuse Robert Charroux Propos Sur L'avenir SpatialDocument41 pagesAventure Mystérieuse Robert Charroux Propos Sur L'avenir Spatialanneavrillaut100% (1)
- Bureautique MTP TSBDocument173 pagesBureautique MTP TSBZakaria Encg100% (1)
- Les Trois Groupes de Verbes: Chanter, Manger, Tomber, LaverDocument5 pagesLes Trois Groupes de Verbes: Chanter, Manger, Tomber, LaverJacky JophePas encore d'évaluation