Académique Documents
Professionnel Documents
Culture Documents
Hibon
Transféré par
driss85Titre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Hibon
Transféré par
driss85Droits d'auteur :
Formats disponibles
Analyse dimage : caractrisation de textures
dimages de gels lacts
Olivier Hibon
encadrants : David Legland et Xavier Gandibleux
Institut National de Recherche Agronomique
UMR Gnie et Microbiologie des Procds Alimentaires
Avenue Lucien Brtignires
CBAI - LGMPA BP 1
78850 THIVERVAL-GRIGNON France
olivier.hibon@etu.univ-nantes.fr
Rsum Ce document prsente des mthodes danalyse dimages adap-
tes la caractrisation de textures de gels lacts dans le but dalimenter
des modles daliments. Les plages de pixels et les matrices de cooccur-
rence dcrivent indiremment les structures sombres ou claires travers
des attributs synthtiques. La covariance permet dtudier lorganisation
relative de deux structures identies dun gel. La granulomtrie par mor-
phologie mathmatique permet de mesurer une taille caractristique de
particule. Nous proposons des innovations en terme de mthode puis une
critique des outils travers des applications sur deux types de gel.
Remerciements
Je tiens remercier David davoir bien voulu mencadrer durant ce stage et pour
ses prcieux conseils. Merci Nathalie, Sbastien, Julie, Alain et Steven pour leur forte
contribution en connaissance des gels lacts, en ides, questions et critiques construc-
tives. Merci tous les autres collgues pour lambiance de travail conviviale.
1 Introduction
Linstitut national de la recherche agronomique (INRA) est un organisme
de recherche franais. Il mne des recherches pour une alimentation saine et de
qualit, pour une agriculture durable et comptitive, et pour un environnement
prserv et valoris
1
. LInra est, dans son domaine, le premier au niveau eu-
ropen et le second au niveau mondial en terme du nombre de publications en
sciences agricoles et en sciences de la plante et de lanimal. LUMR Gnie et mi-
crobiologie des procds alimentaires (GMPA), base Grignon, mne un travail
de recherche multidisciplinaire centr sur la connaissance, la caractrisation et
lamlioration de la qualit des produits alimentaires obtenus par fermentation.
Cette unit travaille avec dautres laboratoires sur des projets communs comme
DREAM.
1
http://www.inra.fr
Contexte du stage DREAM est un projet de recherche europen trans-disciplinaire
dont le but est de dvelopper des modles standards daliments. Ceux-ci ont pour
vocation de faciliter ltude de la qualit nutritive et des risques/bnces dans
la recherche et lindustrie agro-alimentaire. Ces modles physiques et math-
matiques doivent tre ralistes et gnriques. Cest dire quils doivent raliser
une description dynamique complte du processus de fabrication en utilisant les
dernires innovations en science cognitive et systmes complexes.
Les dirents volets de DREAM sont rpartis en huit work packages (WP)
qui sont traits avec le concours de dix-huit laboratoires europens, publics et
privs, et de deux multi-nationales (Bongrain SA et United Biscuits Limited).
LUMR GMPA intervient sur deux WP. Le WP4 concerne le dveloppement
proprement dit des modles de gels lacts et le WP1 traite lintgration et la
reconstruction de connaissances partir de modles de direntes disciplines
scientiques et dexpertises techniques.
Dans le cadre du WP4, nous nous proposons danalyser des images de gels
lacts en extrayant des caractristiques an dalimenter les modles mathma-
tiques. Ainsi, en relation avec les modlisateurs et les experts en gels lacts, nous
allons dterminer quels sont les paramtres extraire des images puis concevoir,
dvelopper et valider les outils adquats. Dans lidal, ces paramtres doivent
tre relis des caractristiques physiques, en particulier rhologiques, pour fa-
ciliter leur interprtation et leur intgration dans les modles.
Les gels lacts Un gel lact est produit partir de lait naturel ou recompos
contenant :
permat de lait (eau et chlorure de sodium)
protines sriques (solubles) et casines (en suspension dans leau)
lipides (matire grasse)
auxquels on peut rajouter de lamidon (empois damidon de mas cireux rticul),
mais aussi des carraghnanes ou dautres agents gliants..
Ces gels sont dit particulaires, cest dire quils sont forms par une agrga-
tion de particules qui les composent (qui peuvent tres elles-mmes des agrgats
de particules individuelles).
Les procds de fabrication des laboratoires participants au projet sont tous
dirents mais ils comprennent le dclenchement et le contrle dune suite de
quatre phnomnes importants pour la formation du gel. Ce sont ces phnomnes
qui seront modliss :
1. Traitement thermique (TT) : dnaturation des protines sriques et forma-
tion dagrgats
2. Acidication : formation de rseaux de casines
3. Homognisation : formation de microstructures
4. Refroidissement : formation du gel nal
Durant le processus de fabrication, des chantillons sont prlevs et des
images sont enregistres travers un microscope confocal (CLSM pour Confocal
Laser Scanning Microscopy) ou un microscope lectronique transmission (TEM
pour Transmission Electron Microscopy). On peut donc obtenir des images de
gels trs direntes selon le traitement quils ont subi et leurs compositions.
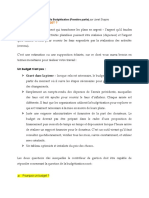
Des images de textures de gel Lorganisation microscopique dun gel volue trs
fortement durant sa fabrication puisque lon part dune solution pour arriver
des structures microscopiques et macroscopiques. Les textures que nous analyse-
rons seront donc trs varies comme on peut le voir sur la gure 1 page suivante.
Les images 1(a) et 1(b) montrent une solution de srum dalbumine bovin 2
(SAB 2) ayant subit un traitement thermique. La seconde contient de la pectine,
un agent gliant. On voit bien une nette dirence par rapport la premire :
il y a une agrgation des protines et le dbut de la formation dun rseau. Au
contraire, la premire ne prsente aucune structure apparente.
Limage 1(c) est celle dune solution contenant des protines issues du lacto-
srum (WPI pour Whey Protein Isolate) et des grain damidon de mas cireux
rticul (CWMS pour Cross-linked Waxy Maize Starch). Les grains damidon
apparaissent en sombre et les agrgats de protines en blanc, rpartis majoritai-
rement dans la phase inter-granuleuse tandis quune partie parat adsorbe par
lamidon. Le fond de limage, en gris, est la suspension de protines dans leau.
Enn limage 1(d) permet dobserver linterface des globules gras contenus
dans un gel lact. Les espaces libres taient occups par les lipides qui ont t
vacus pendant la phase de prparation lobservation. Cette phase a aussi
introduit des artefacts (les points les plus sombres). Les agrgats sombres sont
les micelles de casines.
Comme on peut le voir sur les images 1(a), 1(b) et 1(d), on a du mal
distinguer les particules les unes des autres. Cest dire quelles prsentent des
variations une chelle infrieure notre chelle dinvestigation [26].
Cest pourquoi on se propose de dcrire ces images en utilisant des outils
danalyse de texture.
Nous allons dabord prsenter un tat de lart de la caractrisation de texture.
Celui-ci ne se veut pas exhaustif mais prsente les mthodes qui nous ont sembl
les plus aptes rsoudre notre problmatique. Les notions de base de lanalyse
dimages sont rappeles en annexe. Ensuite nous aborderons limplmentation
des outils permettant de mettre en uvre les mthodes dj existantes slection-
nes mais aussi les contributions que nous y apportons. Nous mettrons ensuite
en application les mthodes danalyse sur deux types de gels lacts. Enn, nous
conclurons ce rapport en faisant un bilan des mthodes employes ainsi que des
travaux en cours et des perspectives quils ouvrent.
2 Etat de lart
Analyse de texture et analyse dimage Il faut considrer que lanalyse de texture
est direntes de lanalyse dite dimage, qui consiste caractriser la taille et
la forme des particules. Analyser une texture signie chercher et quantier les
corrlations et relations entre les niveaux de gris des pixels en fonction de la
distance qui les spare. Ces relations ne sont pas toujours faciles interprter.
(a) (b)
(c) (d)
Fig. 1: Textures de gels obtenus avec direntes formulations : (a) SAB 2 et
TT CLSM, (b) SAB 2 / pectine 0.21% et TT CLSM, (c) 0.5% WPI / 3%
CWMS CLSM, (d) interface dun globule de gras TEM
Pour ce faire, il est possible de sentraner sur des images synthtiques ou sur
des images pour lesquelles il existe des connaissances dexpert.
2.1 Mthodologie gnrale
Initialement, lanalyse de texture sest appuye sur les statistiques du premier
ordre donnes par lhistogramme des niveaux de gris. Elles donnent une bonne
description des niveaux de gris comme la moyenne, la variance, lasymtrie, etc
(cf A.3). Cest donc une caractrisation de la distribution des pixels en niveaux
de gris, mais qui ne prend pas en compte la distribution spatiale des pixels [10].
Julesz (1962) avait postul que lil humain ne pouvait pas discriminer deux
textures si celles-ci possdaient les mmes distributions de probabilit pour le
premier et le second ordre. Mme sil a trouv lui mme des contre-exemples [17],
les statistiques de premier et de second ordre sont les plus utilises pour la
caractrisation de texture, en particulier travers les mthodes de plages de
pixels (cf 2.2) et les matrices de cooccurrences (cf 2.3).
Nous prsenterons ensuite lutilisation de la morphologie mathmatique (cf 2.4),
pour construire des courbes granulomtriques, inspire des mthodes dtude de
la granulomtrie des particules en gologie. Nous pourrons ainsi quantier la
distribution en taille des objets ou particules prsentent dans limage. Cette
mthode peut tre employe aprs segmentation, lorsque tous les lments sont
classis, mais aussi sur les images en niveaux de gris. Les rsultats ne dpendent
alors plus de la technique et de la qualit de la segmentation/classication de
limages.
La texture dun gel dpend en partie de sa micro-structure qui est rsul-
tante des interactions entre ses constituants. Nous avons donc besoin dtudier
lorganisation spatiale dune structure ou lorganisation relative de deux struc-
tures. La covariance et la covariance croise sont des outils, l encore issus de
la morphologie mathmatique, adapts ces besoins (cf 2.5).
2.2 Longueurs de plage
La matrice des isosegments, ou plages (en anglais GLPRM : Gray Level Pixel-
Run Matrix), est un outil intressant pour lanalyse dimages. Les rsultats ne
sont pas toujours probants mais sa simplicit de mise en uvre en fait un outil
populaire. Nous allons dabord expliquer la construction des isosegments, puis
nous prsenterons les deux approches permettant dexploiter cette construction.
Un isosegment est un ensemble de pixels conscutifs dans une direction don-
ne ayant le mme niveau de gris, modulo un seuil T de variation maximale au
sein dune plage choisi par lutilisateur [34]. On choisit en gnral les directions
orthogonales (0
o
, 90
o
) ou diagonales (45
o
, 135
o
).
(a) image originale en
niveaux de gris
(b) plages de pixels
Fig. 2: Illustration de la construction des plages de pixels pour la direction = 0
et le seuil T = 1
partir de cette construction, on peut sintresser la longueur moyenne
dune plage de pixels, lcart type, la variance, etc. Cela peut donner des indi-
cations utiles pour discriminer des images mais il nest pas trivial de relier ces
attributs des caractristiques physiques.
La dmarche classique danalyse consiste stocker les informations de plages
de pixels dans une matrice Q(k, l) o k est le niveau de gris reprsentatif dune
plage de pixels et l est la longueur de la plage [12]. Le niveau de gris reprsentatif
peut tre le niveau moyen, mdian, etc. des pixels de la plage. partir de Q(k, l),
on calcule plusieurs attributs synthtiques permettant de caractriser limage.
Les deux plus parlants sont : la non-uniformit, calcule par
k
(
l
Q(k, l))
2
l
Q(k, l)
qui quantie la distribution des niveaux de gris, et le pourcentage de plage
l
Q(k, l)
l
l Q(k, l)
qui quantie laspect granuleux de limage.
Le paramtre de seuil T permet danalyser limage dirents niveaux de
dtails [13]. Trouver la ou les valeurs les plus signicatives a un fort impact
sur la qualit des rsultats. Il nexiste pas, dans la littrature, de mthode pour
trouver la valeur optimale [34]. Cest pourquoi nous avons choisit de faire varier
T pour observer lvolution des attributs en fonction du seuil. Cette volution
peut ensuite tre synthtise par une pente lorigine, une exponentielle, etc.
On peut jouer sur le paramtre dangle de deux manires : si limage pr-
sente des changements de directions, on xe = 0 [14]. En revanche, dans le
cas dimage caractre anisotrope, on fera prendre toutes les valeurs de son
ensemble de dnition [9].
Le calcul des plages de pixels se fait rarement partir de limage originale. Le
nombre de niveaux de gris de limage est en gnral important (255) donc on le
rduit une valeur beaucoup plus faible comme 16, 32, etc. Cest un paramtre
sur lequel il est possible de jouer, en concordance avec le seuil, pour analyser
limage direntes chelles.
2.3 Matrice de cooccurrence
Les matrices de cooccurrence sont un des outils les plus utiliss pour eectuer
une analyse statistique dune image, en particulier pour celles de type texture.
Le principe gnral est de calculer le nombre de transitions entre niveaux de gris.
Construction de la matrice de cooccurence La matrice de cooccurrence
MC
t
de la rgion R dune image I est construite pour tout couple de niveaux
de gris (i, j) de la faon suivante :
MC
t
(i, j) = card{(s, s +t) R
2
|I(s) = i, I(s +t) = j}
Cest dire que pour un vecteur t donn, on compte le nombre de transitions
dune valeur de gris i une valeur de gris j, et on rfrence cette valeur dans la
matrice des transitions. En pratique, on rduit le nombre de niveaux de gris L
16 ou 32 [27]. MC
t
est donc une matrice L L.
Une matrice de cooccurrence MC est fonction de deux paramtres : est
la direction du vecteur dont lorigine et lextrmit sont deux pixels et d est la
distance entre les deux pixels. On choisit {0
o
, 45
o
, 90
o
, 135
o
} et d selon la
rsolution et le type de texture.
Si on a des informations sur une taille moyenne des particules prsentes sur
limage, on peut prendre d de cet ordre. En cas de manque dinformation, on
choisira d = 1 [34] ou un groupe de direntes valeurs [20]. On notera t le vecteur
dni par (, d).
On peut comparer les trois textures de gels prsentes en gure 3 page suivante.
Leurs surfaces de cooccurrence sont nettement direntes. La matrice de cooc-
currence de la texture 3(e) est la seule dont les valeurs non-nulles sont rparties
sur toute la surface alors que pour les textures 3(a) et 3(c), ces valeurs restent
au voisinage de la diagonale. Cela traduit pour cette premire un contraste plus
lev, cest dire un grand nombre de transitions entre des niveaux de gris trs
dirents. Les valeurs non-nulles de la matrice de cooccurrence de la texture
3(a) sont moins tales sur la diagonale que celles de la texture 3(c) ce qui nous
permet de dire que la dynamique est plus faible.
Exploitation de la matrice de cooccurrence Lanalyse visuelle des surfaces
de cooccurrence nest ni vidente pour lhumain, ni facilement manipulable par
un ordinateur. Cest pourquoi on prfre sintresser des attributs numriques
calculs directement partir de la matrice de cooccurrence. Ils sont appels
indices de texture du second ordre. Haralick a propos 14 attributs pouvant tre
extraits [16]. Nous dcrirons les plus importants. Lorsquon choue caractriser
une texture avec ceux-ci, alors on emploie aussi ceux qui ne sont pas dcrits
ici [34].
Enn il y a deux coles pour rendre les indices de plusieurs images compa-
rables :
Normaliser la matrice de cooccurrence : on la normalise par la fonction
MC
t,S
(i, j) =
MC
t
(i, j)
S
o le paramtre de normalisation S est gnralement N
c
=
j
MC
t
(i, j) [29].
Les ensembles de dnition des indices de texture sont alors connus.
Calculer des indices de textures normaliss : la matrice de cooccurrence nest
pas normalise mais chaque indice de texture lest. Tous les ensembles de dni-
tions des attributs sont identiques et gales [0, 1] [5]. Cest cette approche que
nous allons prsenter.
(a) 1,5% WPI / 3% CWMS
2
4
6
8
10
12
14
16
2
4
6
8
10
12
14
16
0
50
100
150
200
250
(b) matrice de cooccurrence de 1,5% WPI
/ 3% CWMS
(c) SAB2 pectine 0,21%
2
4
6
8
10
12
14
16
2
4
6
8
10
12
14
16
0
10
20
30
40
50
60
70
80
90
(d) matrice de cooccurrence de SAB2 pec-
tine 0,21%
(e) SAB2 pectine 0%
2
4
6
8
10
12
14
16
2
4
6
8
10
12
14
16
0
10
20
30
40
50
(f) matrice de cooccurrence de SAB2 pec-
tine 0%
Fig. 3: matrices de cooccurrence de textures de gel calcules sur une fentre de
60 60 pixels pour t = (0, 1) sur 16 niveaux de gris
Notation 1 Le nombre de couple (s, s +t) dune rgion R :
N
c
=
j
MC
t
(i, j)
Notation 2 Moyennes pondres en ligne ou en colonne :
m
x
=
1
N
c
j
i MC
t
(i, j)
m
y
=
1
N
c
j
j MC
t
(i, j)
Notation 3 Variance en ligne ou en colonne :
2
x
=
1
N
c
j
(i m
x
)
2
MC
t
(i, j)
2
y
=
1
N
c
j
(j m
y
)
2
MC
t
(i, j)
Denition 1. Homognit
1
N
2
c
j
(MC
t
(i, j))
2
Lhomognit traduit le fait que lon rencontre souvent ou non le mme couple
de pixels spars par la translation t. Elle est leve si limage est un niveau de
gris uniforme ou quand limage est motif de priode d dans la direction .
Denition 2. Contraste
1
N
c
(L 1)
2
L1
k=0
k
2
|ij|=k
MC
t
(i, j)
Le contraste est important quand on passe souvent dun niveau de gris faible
(resp. lev) un niveau de gris lev (resp. faible). Cela est ici traduit en
pondrant fortement les valeurs de MC
t
loignes de la diagonale. Inversement,
le contraste est faible lorsque les termes de la matrice sont concentrs dans le
voisinage de la diagonale.
Denition 3. Entropie
1
1
N
c
ln(N
c
)
j
MC
t
(i, j) ln(MC
t
(i, j))1
MCt(i,j)
o 1
MCt(i,j)
=
1 si MC
t
(i, j) = 0
0 sinon
Lentropie caractrise la dispersion en espace et en valeurs des valeurs non-nulles
dans MC
t
. Elle est faible si les quelques couples de pixels sont bien reprsents,
et forte si la plupart des couples de pixels le sont peu. Cela donne donc une
indication du dsordre que lon peut trouver dans limage.
Denition 4. Corrlation
1
N
c
j
(i m
x
)(j m
y
)MC
t
(a, b)
La corrlation mesure les dpendances linaires des pixels (ie. en ligne et en
colonne).
Denition 5. Directivit
1
N
c
i
MC
t
(i, i)
La directivit est importante si il y a de nombreux pixels de mme niveaux de
gris spars par la translation t.
Denition 6. Uniformit
1
N
2
c
i
MC
2
t
(i, i)
Cet indice est dautant plus faible que les valeurs non-nulles de la diagonale de
MC
t
sont quirparties. Plus lindice est lev, plus le nombre de niveaux de gris
renvoyant eux mme par la translation t est faible.
Travailler avec un unique vecteur t donne des rsultats dpendants des deux
paramtres et d marquant donc un comportement anisotrope. Le choix de d a
dj t abord plus haut mais pas celui de . En pratique, on calcul plusieurs ma-
trices de cooccurrences par un choix de plusieurs valeurs de [10]. Les rsultats
sont plus complexes tudier puisquon se retrouve devant un nombre dindices
de texture important. De plus, les attributs prsentent des inter-dpendances.
2.4 Granulomtrie par morphologie mathmatique
La granulomtrie est ltude de la distribution statistique des tailles de parti-
cules. Cette discipline sinspire de lanalyse granulomtrique base de tamisages
successifs employe en gologie. Elle consiste faire passer des lments de ma-
tire nis ou fractionns au travers de mailles calibres de tamis. Les tamis sont
superposs par tailles de mailles croissantes (plus large en haut et plus n en
bas). On mesure la quantit de matire retenue sur chaque tamis. Cette mthode
de mesure est :
anti-extensive car ce qui est retenu par un tamis ne peut tre quun sous-
chantillon de lchantillon dentre.
croissante car si on tamise seulement une partie P dun chantillon E, on
obtient un sous-chantillon de ce que lon aurait obtenu en tamisant E.
idempotente car tamiser deux fois le mme chantillon par le mme tamis
donne le mme rsultat.
Relation entre tamisages successifs et ltre morphologique Comme nous lavons
vu en A.1, louverture morphologique est anti-extensive, croissante et idempo-
tente. On a donc un parfait parallle entre ces deux mthodes que lon peut
expliquer intuitivement de la faon suivante : nous avons vu que le ltrage dune
image par ouverture morphologique fait disparatre les objets qui sont plus petits
que llment structurant, et ne modie que lgrement les objets plus grand.
Nous pouvons donc remplacer les tamis par une succession douvertures morpho-
logiques. Le calibre des mailles est remplac par la taille et la forme de llment
structurant [30].
La quantit de matire retenue dans un tamis est mesure par la masse. Pour
lanalyse granulomtrique dimage, on emploi la mesure suivante :
Denition 7. Soit I une image en niveaux de gris de dimension n m. La
quantit
n
i=1
m
j=1
I(i, j)
est appel volume de limage et sera note V
I
La courbe est ensuite norme et drive de la faon suivante :
g(i) =
V
I
(i) V
I
(i + 1)
V
I
(initial) V
I
(final)
o V
I
(initial) est le volume original de limage V
I
(final) est le volume aprs la
dernire rosion.
Exploitation de la courbe de granulomtrie La courbe de granulomtrie prsente
des inexions qui sont synonymes dune disparition de particules dune certaine
taille. Cest pourquoi on porte plus dattention la drive de la fonction. Un
maximum local de la driv pour une taille dlment structurant correspond
un nombre important dobjets de taille quivalente. On peut voir deux pics
sur la gure 4(b) : on peut donc estimer quun grand nombre dobjets ont un
diamtre de 19 pixels ou 37 pixels. En pratique les pics ne sont pas si prononcs
et il est parfois dicile dinterprter la courbe. De plus, des objets peuvent se
recouvrir partiellement. Cette mthode prsente toutefois lavantage de ne pas
ncessiter de segmentation ni de classication. Une image en niveaux de gris est
directement exploitable.
(a) image contenant des parti-
cules de deux tailles
0 5 10 15 20 25 30 35 40 45
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
taille de llment structurant (pixel)
v
o
lu
m
e
n
o
r
m
a
lis
(b) courbe et courbe drive normes de
la granulomtrie
Fig. 4: Illustration de lanalyse granulomtrique par morphologie mathmatique
Le choix de llment structurant Comme nous lavons vu, ltude de la gra-
nulomtrie par morphologie mathmatique consiste faire grossir un lment
structurant petit petit. Le choix de la forme est totalement libre du moment
quil reste connexe. Selon que lon souhaite tudier lanisotropie dune image ou
non, llment structurant sera orient ou non.
Par exemple, ltude de lorientation gnrale dune structure breuse peut se
faire par lanalyse granulomtrique par morphologie avec un lment structurant
de type segment orient dune paisseur donne. Notons que la discrtisation
dun segment orient pose quelques problmes en pratique, cest pourquoi on se
restreint en gnral aux directions 0, 45
o
, 90
o
et 135
o
.
Pour une tude de la granulomtrie indpendante de lorientation, on choi-
sit un lment structurant en forme de disque. Mais l encore, travailler avec
une reprsentation discrte dun disque nest pas simple. Il existe de plusieurs
mthodes pour approcher un disque continu mais toutes ne respectent pas le cri-
tre dabsorption. La recherche dune approximation la plus isotrope respectant
le critre dabsorption est une tche dlicate [30]. En pratique, on utilise une
mauvaise approximation : le carr.
Exemple dapplication Nous nous intressons la cintique de laccroissement de
la porosit dun gel laitier (de type prsure) qui est connue pour soprer dans les
heures suivant sa formation [22]. Trs peu de mthodes permettent de quantier
ce phnomne de manire continue, si ce nest la diusion dune molcule sonde
par rsonance magntique nuclaire (RMN) dans la micro-structure du gel. Mais
cest une technique extrmement coteuse. La majorit des articles ont donc
recours une analyse visuelle dimages de microscopie. Lobservation visuelle
est subjective et qualitative. Elle nest donc pas susante pour quantier le
phnomne.
Des images de microscopie lectronique balayage (MEB) sont eectues
1h30, 4h30, 6h15 et 22h aprs glication (cf gure 5). Une analyse granulom-
(a) (b)
(c) (d)
Fig. 5: Images de gels prsures en refroidissements microscope lectronique
balayage (MEB) au bout de : (a) 1h30, (b) 4h30, (c) 6h15, (d) 22h. (Extrait
de [19])
trique est eectue sur les images (2 images pour 5(a), 5(b) et 5(c), 3 pour 5(d)).
Les courbes des drive de la granulomtrie des images moyennes sont prsen-
tes gure 6 page suivante. Elles montrent quau bout de 4h30, le gel contient
moins de trous de 10 14 m de diamtre qu 6h15 mais plus qu 1h30. Cet
ordre sinverse pour les trous de taille suprieur. De plus, au bout de 22h, le gel
contient moins de trous de 15 80 m de diamtre quavant mais plus de trous
de 105 140 m de diamtre.
Ces mesures corroborent bien la connaissance empirique du phnomne concer-
nant laugmentation de la taille des trous au cours du temps qui suit la n de
la fabrication du gel. Enn, sans plus rentrer dans les dtails, le taux daugmen-
tation du diamtre des trous que lon peut estimer est du mme ordre que celui
mesur par la diusion RMN.
La granulomtrie par morphologie mathmatique est donc un outil perfor-
mant pour estimer un taille caractristique de particules ou de trous dune tex-
ture, et ce malgr les multiples biais de la mesure (technique de microscopie
ncessitant de scher lchantillon, lment structurant carr, etc.).
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
0 20 40 60 80 100 120 140
taille de llment structurant
4h08
7h00
8h45
24h
Fig. 6: Drive de la courbe de granulomtrie : fermeture morphologique
disparition des trous chelle en m
2.5 Covariance
La covariance est un outil issu de la morphologie mathmatique (cf A.1 et
A.1) qui permet dtudier lorganisation gnrale dune structure dans limage.
Cest donc une mthode employe pour lanalyse dimage segmente : limage est
partitionne en plusieurs rgions qui sont regroupes par classes. On distingue
la covariance simple, qui tudie la dispersion ou organisation en structure dune
classe, de la covariance croise ou rectangle, qui tude lorganisation relative des
structures de deux classes [7].
Covariance simple Calculer la covariance est analogue analyser la probabilit
de deux pixels distants de r de faire partie de rgions dune mme classe (on
parlera indiremment de classe ou phase). Cest le principe du hit-or-miss .
Denition 8. On dnie le fond de limage par rapport une famille de classes
considres. Soit la famille de classe considres C
i
. Le fond de limage est dni
par (
i
C
i
)
c
.
Denition 9. La covariance dune phase Y sobtient en choisissant au hasard
deux points distants de r sur limage. Le nombre de couples ainsi choisis dont au
moins lun des deux lments appartient au fond de limage est N(ref, r) et celui
dont les lments appartiennent la phase considre est N(Y, r). Lestimation
de la covariance est dnie par :
C
Y
(r) =
N(Y, r)
N(ref, r)
Lorsque r = 0,
C
Y
(r) est une estimation de la fraction volumique de la phase
Y dans limage puisque les deux points du hit-or-miss sont confondus : on
dtermine ainsi le rapport entre le nombre de pixels qui appartiennent la phase
et le nombre de pixels total de limage.
fraction volumique gale, la pente est dautant plus grande que la structure
est ne. En eet, dans le cas dune structure paisse, il faut un espace entre les
deux pixels plus important avant que la probabilit que ceux-ci tombent sur des
phases direntes ne dcroisse.
Ensuite on peut observer des ondulations de la courbe si la structure se rpte
avec une certaine priode. Ces ondulations sont dautant plus accentues que la
priode est marque (cf gure 7 page suivante).
Lorsque r devient trs grand, les deux vnements le point a tombe sur la
phase Y et le point b tombe sur la phase Y deviennent indpendants. Les
probabilits associes ces vnements sont donc multiplies. On a donc
lim
r+
= (
C
Y
(0))
2
Cette limite est appele valeur de rfrence (en anglais : R-value) car cest
la covariance attendue dune phase la structure compltement alatoire [28].
Lorsque lasymptote de la covariance scarte de lasymptote thorique, on peut
subodorer quil existe une macrostructure plus grande que le masque de mesure.
Mais quand elle atteint lasymptote thorique, on ne peut pas pour autant ar-
mer quil nexiste pas de macrostructure plus grande que le masque de mesure.
On voit donc que la courbe de covariance permet dtudier quantitativement
la dispersion dune phase dans une image.
Covariance croise ou rectangle Calculer la covariance croise de deux
phases est analogue analyser la probabilit de deux pixels distants de r de
faire partie de rgions appartenant chacune des phases.
Denition 10. La covariance croise sobtient en choisissant au hasard deux
points distants de r sur limage. Le nombre de couples ainsi choisis dont au
moins un des deux lments appartient au fond de limage est N(ref, r) et celui
dont lun des lments appartient la phase X et lautre la phase Y est
N(XY, r). Lestimation de la covariance croise est :
C
XY
(r) =
N(XY, r)
N(ref, r)
Lorsque r = 0,
C
XY
(r) = 0. En eet, les deux points du hit-or-miss sont
confondus donc la probabilit quun point soit sur la phase X et lautre sur la
phase Y est nulle.
Lorsque la distance entre les points augmente, la probabilit que lun des
points soit sur la phase X et lautre sur la phase Y augmente aussi. Lorsque
(a) rseaux de disques rguliers
0 50 100 150 200 250 300 350
0.05
0.1
0.15
0.2
0.25
0.3
distance entre 2 pixels (pixels)
c
o
v
a
r
ia
n
c
e
(
r
)
Rvalue
(b) courbe de covariance
(c) rseaux de gros disques rgu-
liers
0 50 100 150 200 250 300 350
0.1
0.15
0.2
0.25
0.3
0.35
distance entre 2 pixels (pixels)
c
o
v
a
r
ia
n
c
e
(
r
)
Rvalue
(d) courbe de covariance
(e) rseaux de disques prsentant
une certaine priodicit
0 50 100 150 200 250 300 350
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
distance entre 2 pixels (pixels)
c
o
v
a
r
ia
n
c
e
(
r
)
Rvalue
(f) courbe de covariance
Fig. 7: Illustration des variations de la courbe de covariance en fonction de
larrangement des structures
(a) rseaux de disques de deux
phases
0 50 100 150 200 250
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
distance entre 2 pixels (pixels)
c
o
v
a
r
ia
n
c
e
(
r
)
Rvalue
(b) courbe de covariance croise
(c) rseaux de disques de deux
phases
0 50 100 150 200 250
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
distance entre 2 pixels (pixels)
c
o
v
a
r
ia
n
c
e
(
r
)
Rvalue
(d) courbe de covariance croise
Fig. 8: Illustration des variations de la courbe de covariance croise en fonction
de larrangement relatif des structures
la covariance croise est suprieur la valeur de rfrence, on parle alors de
corrlation de structure positive [28]. La valeur de rfrence de la covariance
croise des phases X et Y est dnie comme la fraction volumique de la phase
X multipli par la fraction volumique de la phase Y (cf gure 8).
2.6 Outils statistique danalyse de donnes
La plupart des outils danalyse de textures gnrent un nombre de donnes
important. Chaque donne est la mesure dun individu en fonction dune variable
ou composante.
Avec beaucoup de donnes, il nest pas facile de mettre en vidence les va-
riables les plus signicatives. Cest pourquoi, on peut chercher des nouvelles
composantes permettant de mieux exprimer les donnes. Elles permettent de
reprsenter les donnes de manire mieux mettre en vidence les dirences
entre les individus et didentier les variables corrles.
Analyse en composantes principales (ACP) Lanalyse en composantes princi-
pales est une mthode factorielle faisant partie du groupe des mthodes des-
criptives multi-dimensionnelles. Elle permet de reprsenter les donnes dans un
espace qui maximise linertie, cest dire la dispersion des points projets sur
les axes.
Nous dcrirons dans un premier temps le principe de dtermination itratif
des composantes principales sans rentrer dans les dtails calculatoires (problme
de maximisation relax par la mthode de Lagrange, etc.). Nous expliquerons
ensuite comment xer le critre darrt. Enn, linterprtation des rsultats de
lACP sera aborde.
Les donnes sont reprsentes par une matrice X de dimension n p, o n
est le nombre dindividus et p le nombre de variables. On peut interprter X
comme un nuage de points dans un espace de dimension p. LACP peut tre
vue gomtriquement comme la recherche dun nouvel espace de reprsentation
de ces points, pour lequel les axes principaux sont aligns avec les directions
caractristiques du nuage de points. En dautres termes, le but de lACP est
de dcrire un maximum de variabilit avec un nombre (rduit) de nouvelles
composantes C
1
. . . C
k
, avec C
i=1...k
combinaison linaire des variables dorigine
X
1
. . . X
p
et k p. Les C
i=1...k
doivent tre deux deux non corrles, de
variance dcroissante, avec C
1
de variance maximale.
En travaillant sur le nuage de points, on dnit C
1
comme lune des droites
parallles laxe dallongement maximal du nuage. Pour quelle soit dtermine
de faon unique, on choisit celle passant par le centre de gravit G du nuage
de point. La coordonne du point i sur laxe C
1
est note c
i
1
. Par construction
de C
1
, les c
i
1
sont le plus disperss possible : leur variance est donc maximale.
De mme, aprs projection, C
1
est la droite qui conserve au mieux les distances
entre les points : la distortion est minimale.
Le processus permettant de dterminer les composantes principales est it-
ratif. partir de C
1
, on cherche C
2
telle que :
C
2
passe par G
C
2
C
1
la variance des c
i
2
est maximale.
C
1
et C
2
dterminent alors le plan de moindre distortion (ie aprs projection,
les distances entre les points sont le mieux conserves). La dtermination des
C
i=3...k
suit le mme principe.
Chaque valeur propre mesure la part de variance explique par laxe corres-
pondant. La variance explique par les n premires composantes principales est
n
i=1
i
. Le critre darrt est satisfait lorsque la part de variance explique par
les n premires composantes atteint un certain seuil. Si les variables sont forte-
ment corrles entre elles, un nombre rduit de composantes permet dexpliquer
80% 90% de la variance totale.
Linterprtation des rsultats dune ACP est riche. En gnral, on projette
les points sur les plans de moindre distortion (C
1
, C
2
puis C
2
, C
3
, etc.). Cela
permet dessayer de trouver une signication chaque composante principale en
regardant ceux qui sont opposs sur un axe. En eet, rien ne garantit que deux
points proches sur un plan le sont aussi dans lespace [8], alors que deux points
loigns sur le plan le sont aussi dans lespace. Les informations tires sont donc :
les variables qui expriment le plus les dirences entre les individus, ainsi que
les corrlations entre les direntes variables.
Enn, lACP sert souvent de pr-traitement dautres mthodes danalyse,
comme a peut tre le cas pour lanalyse de variance un ou plusieurs facteurs.
3 Outils dvelopps
Le dveloppement des outils sest fait sous MATLAB
2
an de proter de
la bote outils de traitement dimage et des programmes dj dvelopps en
interne. Les programmes sont donc portables et peuvent tre utiliss par tout
possesseur dune licence MATLAB, ce qui est la cas de la plupart des labora-
toires de lINRA. Une attention toute particulire a t porte sur les manuels
dutilisation des programmes, pour en faciliter ladoption et lutilisation, et sur
la documentation du code pour en faciliter lvolution et la maintenance.
Matrice de cooccurrence Le calcul de la matrice de cooccurrence dune image
par un vecteur donn fait partie des outils fournis par MATLAB. En revanche
le calcul des attributs ne suit pas le choix de la mthode de normalisation que
nous avons fait. Nous avons donc implment cette partie.
Le choix de la longueur du vecteur permettant de calculer la matrice de co-
occurrence se fait en pratique partir dune connaissance a priori de limage
analyser. Nous avons dcid de ne pas travailler de cette manire. Nous cal-
culons les attributs synthtiques de nombreuses matrices de cooccurrences dont
les constructions sont paramtres par des vecteurs de direntes tailles. Non
seulement cela permet de dterminer quelles sont les longueurs de vecteurs les
plus appropries pour discriminer ou corrler des images. Mais nous obtenons
aussi plus dinformations en interprtant lvolution des attributs synthtiques
dans le temps .
Granulomtrie Un outil prouv de calcul de courbes granulomtriques sur une
collection dimages existe dj au sein de lINRA. Nous avons rajout le support
de la granulomtrie binaire partir dimages segmentes ou en niveaux de gris.
Lutilisateur choisit le niveau de gris correspondant la phase qui lintresse,
tous les pixels de niveaux de gris dirents sont alors considrs comme le fond
de limage. An dobtenir de plusieurs images des courbes de granulomtrie
comparables, la phase choisie devient blanche et le fond noir.
3.1 Plage de pixels
Le calcul des plages de pixels des paramtres est expos section 2.2 page 5.
Nous y avons voqu les mthodes de balayage les plus utilises. Elles nous
2
http://www.mathworks.com
ont toutefois apparu avoir le gros dfaut de trs peu respecter les voisinages.
En eet, de manire gnral, pour un voisinage de 4-connexit, seul la moiti
sont conservs, et seulement un quart pour un voisinage de 8-connexit. Cest
encore pire lorsque lon largit la notion de voisinage aux pixels une distance
suprieur 1 (en nombre de pixels, que ce soit lhorizontal ou en diagonale).
Intuitivement, ces parcours traversent trop rapidement les structures prsentent
dans les images. De plus, il nest pas vident que moyenner les attributs de
dirents balayages ait un sens.
Introduction dun nouveau type de parcours Pour nous aranchir de ce dfaut
ainsi que du caractre hautement anisotrope des balayages existants, nous avons
choisit den proposer un nouveau. Cest un parcours bas sur la fractal de Hil-
bert [6] (cf gure 9). Il conserve une majorit des voisinages lors de la linari-
sation de limage comme on peut le voir sur le tableau suivant :
balayage ligne colonne Hilbert
% de voisinages de limage 2D
conservs la suite de la lina-
risation
25 25 58
Fig. 9: Illustration des parcours de Hilbert dordres 1 (image 2 2) 4 (image
16 16)
Bien que la nature fractal du parcours se prte un algorithme rcursif, nous
avons choisi de limplmenter de manire itrative pour des considrations doc-
cupation mmoire. En eet, la consommation mmoire du calcul du parcours de
Hilbert de manire rcursive est importante. Pour une image carre I de dimen-
sion n n, lalgorithme rcursif de base a besoin de 2 log(n)/ log(4) niveaux de
rcursion. Le i
ieme
niveau a un besoin de 4
i
units de mmoire. La consommation
nale est donc de :
2 log
4
(n)
i=1
4
i
Au contraire, la consommation maximale de mmoire de notre implmenta-
tion (cf algo B page 48) est de n
2
units de mmoire et sa complexit est en
O(nlog(n)).
Une fois limage linarise, la construction des plages suit toujours le mme
principe quelque soit le parcours utilis. Elle ne dpend que des paramtres de
seuil et de nombre de niveaux de gris.
Choix du seuil Le choix du seuil de variation maximal des niveaux de gris au
sein dune plage se fait en pratique partir dune connaissance a priori de
limage analyser. L encore, comme pour les matrices de cooccurrences, nous
avons dcid de ne pas travailler de cette manire. Nous calculons les attributs
synthtiques de nombreux dcoupages en plages de pixels dont les constructions
sont paramtres par direntes valeurs de seuil. Nous pouvons donc dterminer
quelles sont les valeurs de seuil les plus appropries pour discriminer ou corrler
des images. Nous obtenons aussi plus dinformations en interprtant lvolution
des attributs synthtiques dans le temps .
3.2 Covariance
Il nexiste pas de mthode permettant de calculer la covariance de deux
phases P
1
et P
2
(o P
1
peut tre gale P
2
) de manire exacte : on se contente
toujours dune approximation. Nanmoins, on peut opposer deux manires des-
timer la covariance partir dune image segmente. La mthode dite exhaustive
emploie toutes les informations prsentes dans limage laide dun cercle oscul-
tant. Elle a lavantage de prsenter une bonne approximation mais au prix dune
forte complexit algorithmique. Elle permet dobtenir une courbe de covariance
assez prcise. La mthode destimation relaxe, base de translation, est plus
rapide, ce qui prsente un avantage pour traiter dimportantes collections de
donnes, mais les rsultats dpendent de la nature anisotrope ou non de limage.
Par cercle oscultant Le principe de cette mthode est expos en algorithme 1 page suivante.
Pour que la mthode soit exhaustive, il faut utiliser une approximation de
cercle discret adquate. La runion de tous les cercles dun mme centre c de
rayon r = 1 . . . n doit tre un disque de centre c et de rayon n. En dautres mots :
en grandissant, le cercle oscultant ne doit oublier aucun pixel au passage. Cest
pour cela que nous avons choisit, parmi les nombreuses approximations de cercle
discret qui existent, lalgorithme de trac de cercle Andres [32]. De plus, cest
un algorithme trs rapide (en O(r)), en particulier car il ne fait pas appel des
fonctions trigonomtriques.
Intressons nous maintenant la complexit de lalgorithme complet. Soit I
une image de dimension n m et k le rayon maximum du cercle oscultant. On
va appeler k fois lalgorithme de Andres avec des rayons de 0 k ce qui implique
une complexit de O(k
2
)). Puis on examine tous les pixels des cercles oscultants
placs en tous points de limage : O(k
2
n m)). Finalement la complexit de
lalgorithme exhaustif destimation de la covariance est en O(k
2
(n m+1)).
Algorithme 1 : covariance(I, k, P
1
, P
2
)
Entres : image I de dimension n m, rayon maximum du cercle oscultant k,
deux phases P1 et P2
Sorties : covariance(r) des phases P1 et P2
pour tout rayon r = 0...k faire
gnrer un cercle discret C de rayon r;
pour tout pixel p [1 . . . n] [1 . . . m] faire
centrer Cp sur p;
pour tout pixel i de Cp faire
si p P1 et i P2 alors
compter un succs pour le hit-or-miss distance r;
sinon
compter un chec pour le hit-or-miss distance r;
n
n
n
covariance(r) = nombre de succs / nombre dchec du hit-or-miss ;
n
Par translation Lestimation de la covariance par translation des deux phases
P
1
et P
2
suit le principe suivant : on choisit un vecteur discret dorientation
et de longueur l. Limage originale I
o
subie une translation par ce vecteur et
donne I
t
. Le nombre de succs du hit-or-miss est le nombre de points de I
o
appartenant la phase P
1
qui sont superposs des points de I
t
appartenant
la phase P
2
. Le nombre dchecs du hit-or-miss est le nombre de points
restant. En faisant varier la taille du vecteur, on obtient une estimation de la
covariance en fonction de la distance.
Lestimation de la covariance est dpendante de la direction du vecteur por-
teur choisit. Cest donc intressant pour tudier une image caractre aniso-
trope. Nanmoins, ce nest pas, en thorie, le cas des gels tudis. Plus prci-
sment, une grande population dchantillons de gels issus dun mme procd
ne prsentera pas de caractre anisotrope mme si a nest pas le cas de chacun
des chantillons. Il y a donc deux mode opratoires possibles pour obtenir des
donnes ables avec cet algorithme :
Travailler avec une unique orientation du vecteur porteur. Il faut alors
appliquer lalgorithme sur une grande quantit dimages et calculer une
fonction de covariance moyenne.
Cette approche suppose que lon ait disposition un nombre dimages
consquent, ce qui nest pas vident pour des causes dorganisation et de
cots.
Rpter lalgorithme avec plusieurs orientations de vecteurs porteurs sur
chaque chantillon et en tirer une fonction de covariance moyenne. Nous
pouvons ainsi travailler avec moins dimages.
Nanmoins, calculer la covariance moyenne nest pas facile. Par exemple,
la covariance obtenue avec une orientation = 0
o
nest pas directement
moyennable avec une covariance obtenue avec une orientation = 45
o
. La
premire tant dnie sur [0, 1, 2 . . . k] et la seconde sur [0,
2, 2
2 . . . k
2].
4 Analyse des textures de gel acide
Le procd de fabrication de gel acide du Valtion Teknillinen Tutkimuskeskus
(VTT, Finlande) est le suivant :
Composition Permat de lait : lait dprotin ne contenant plus que du
lactose (glucides) et des sels minraux
Transglutaminase (TG)
Protines sriques
Matire grasse
Glucono delta-lactone (GDL)
Micelles de casines
Traitements 1. Traitement thermique : dnaturation des protines sriques
qui forment alors des agrgats.
2. Acidication du milieu : formation dun rseau de casines
3. Homognisation : formation de la microstructure
4. Traitement thermique : inhibition lagent acidiant
5. Refroidissement : formation du gel
Les donnes partir du procd gnral, il a t tir trois expriences pour
tudier les rles et linuence du traitement thermique et de la transglutaminase
sur la texture du produit nal. Deux images ont t faites la n de chacune de
ces expriences (cf gure 10 page suivante) qui sont :
Mlange des produits sans TG et sans subir de traitement thermique
(image 10(a)) que nous appellerons H0TG0.
Mlange des produits sans TG subissant un traitement thermique (image 10(b))
que nous appellerons H1TG0.
Mlange des produits avec TG subissant un traitement thermique (image 10(c))
que nous appellerons H1TG1.
Les images ont t prise en microscopie confocale. Les protines gurent en clair
et le fond de limage, en noir, est la phase aqueuse.
Ce que lon cherche caractriser Les images des gels acides que nous avons
obtenus ont t produites par microscopie confocale en ne marquant que les
protines. Cest pourquoi nous allons suivre deux axes de recherche.
Nous allons chercher dterminer une taille caractristique des agrgats de
protines. Cette taille de particules pourra ensuite tre mise en relation avec la
cintique de coagulation ou encore permettre dvaluer limpact de facteurs de
traitement, composition et concentration sur le gel nal.
Nous allons aussi essayer de dterminer une largeur moyenne despace laiss
libre entre les agrgats de protines. Cette caractristique pourra tre mise en
relation avec la cintique de coagulation mais aussi avec le taux de diusion des
autres particules qui ne sont pas visibles sur limage.
(a) (b) (c)
Fig. 10: Solutions contenant du permat de lait, des protines et des lipides : (a)
sans TG ni traitement thermique (H0TG0), (b) sans TG mais avec traitement
thermique (H1TG0), (c) avec TG et traitement thermique (H1TG1)
4.1 Analyse des images
Pour extraire les paramtres recherchs dans les images, nous allons dans
un premier temps utiliser les mthodes de texture, cest dire les plages de
pixels ainsi que les matrice de cooccurrence. Comme nous navons pas dinfor-
mations a priori sur une taille caractristique de particules, nous ne pouvons pas
raisonnablement choisir un unique paramtre pour ces mthodes. Les attributs
caractristiques du dcoupage en plages de pixels seront calculs pour plusieurs
seuils, et nous calculerons des matrices de cooccurrence pour plusieurs longueurs
de vecteur.
Enn, nous mettrons en uvre lanalyse granulomtrie qui nous permettra
dtudier les agrgats de protines ainsi que les trous.
Pr-traitements An de limiter les biais de mesures, nous dcoupons la partie
des images contenant lchelle. Nous recadrons aussi le reste car un artefact est
prsent sur toute la bordure. Il y a donc une perte dinformation mais que lon
considre comme ngligeable car, les images tant en haute rsolution, la part
de pixels supprime est faible.
Enn, pour simuler le fait davoir susamment dimage pour chaque moda-
lit, nous coupons chacune de nos images en quatre parties de mmes dimensions.
Cela nous permet danalyser huit images par mode. Cest un choix critiquable
dun point de vue statistique puisque nous avons pour chaque mode deux groupes
de quatre sous-images provenant dune mme rgion du gel. Il ny a donc pas
relle indpendance entre les images mais les rsultats sont tout de mme plus
facilement exploitables de cette manire.
Analyse de texture Une partie des rsultats des mthodes danalyse de texture
par matrice de cooccurrences et plages de pixels est expose gure 11 page suivante.
Nous avons choisit de ne montrer quun attribut par mthode.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 5 10 15 20 25 30 35
seuil (niveau de gris)
solution
solution+TT
solution+TG+TT
(a)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 5 10 15 20 25 30 35 40 45
distance (pixel)
solution
solution+TT
solution+TG+TT
(b)
Fig. 11: Analyse de texture sur des images en 32 niveaux de gris : (a) non-
uniformit plages de pixels, (b) corrlation matrice de cooccurrence
Le premier phnomne que lon remarque est la nette discrimination entre le
gel contenant de la TG et ceux nen contenant pas. Avec TG, la dcroissante de
la non-uniformit est linaire. Cela sexplique par laspect de la texture qui est
le mme tout endroit de limage. Les plages de pixels de toute limage sont
peu prs dcoupes de la mme manire. Sur ce mme gel, la dcroissance de la
corrlation est bien plus rapide que pour les gels sans TG. Cest dire qu partir
dun pixel, on est moins capable de prdire le niveau de gris des pixels situs
une certaine distance. En particulier on atteint le minimum ds que deux points
sont spars par une distance de 20 pixels. Cela traduit bien le fait quil ny a
pas de zone homogne plus sombre ou plus claire (des densits de particules plus
importantes) que le reste de limage. Laspect global de la texture de gel H1TG1
est homogne, ce qui est laspect attendu dun gel qui a pris.
Il est plus dlicat dexpliquer les dirences entre H0TG0 et H1TG0. Pour
des seuil de 0 20 niveaux de gris, le dcoupage en plages est plus uniforme sur
la texture de H1TG0. En eet, la structure de ces gels a dj une certaine orga-
nisation : on a des zones sombres et un dbut de maillage de zones contenant des
agrgats de protines en plus grande densit. Ces observations sont corrobores
par les courbes de corrlations : des points de limage distants de 1 10 sont
plus corrls dans H1TG0 on reste dans une structure tandis quils le sont
moins pour des distance suprieurs 20 pixels on sort de la structure.
Cette analyse est intressante de plusieurs points de vue. Elle montre bien
quil est judicieux de regarder lvolution des attributs en fonction dun para-
mtre (taille ou seuil) plutt que de chercher une valeur de paramtre idale.
Une taille caractristique de structure peut ainsi tre mise en vidence. De plus,
nous avons lide de synthtiser ces courbes par une pente lorigine ou une
exponentielle. Cela permettrait dobtenir des paramtres synthtiques dcrivant
lvolution des attributs de textures. Nous pourrions ainsi ne pas nous contenter
dune seule estimation dattribut dpendant dun choix de paramtre mais dun
attribut plus reprsentatif. Ces donnes synthtique nous semble plus adaptes
pour tre ensuite employes dans des mthodes de classication, clustering et
autres mthodes danalyse statistiques.
Analyse de la granulomtrie Les rsultats de lanalyse granulomtrique sont
prsents gure 12. Nous allons dabord nous intresser la phase inter-protique
du gel (12(a)) puis cette phase proprement dite (12(b)).
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
0 2 4 6 8 10 12
taille de llment structurant
solution
solution+TT
solution+TG+TT
(a)
0
2
4
6
8
10
12
0 2 4 6 8 10 12
taille de llment structurant
solution
solution+TT
solution+TG+TT
(b)
Fig. 12: Courbes des drives moyennes de la granulomtrie des gels acides
chelle en m : (a) fermeture, (b) ouverture
Les drives de la granulomtrie de la fermeture morphologique montrent que
le gel H1TG1 contient plus de petit trous 0, 5 4m de diamtres que les
gels ne contenant pas de TG. Parmi ces deux derniers, cest H1TG0 qui contient
le moins de petit trous. Si on sintresse aux trous plus gros de 6 8m de
diamtres, les courbes montrent bien que H1TG0 est celui qui en contient le
plus. Cest cohrent avec les rsultats de lanalyse de texture qui montraient la
prsence de structures dans cette image, sans toutefois pouvoir en prciser la
nature. Au contraire, la courbe de granulomtrie H1TG1 ne prsente aucun pic
cet endroit. La taille de ses (petits) trous est assez uniforme, ce qui est encore
cohrent avec les rsultats ci-dessus.
Lanalyse des drives de la granulomtrie de louverture morphologique est
limpide : les uniques pics des courbes sont situs au mme endroit. On a donc
une distribution de taille des particules claires fortement centre sur 0, 5 1m.
Donc, quels que soient les traitements subits et la composition des trois gels, les
agrgats de protines ont tous une taille similaire. En revanche, la distribution
en nombre nest pas la mme. Il y en a plus dans H1TG0 que dans H0TG0,
mais moins que dans H1TG1. Ces rsultats nous permettent donc de mettre en
relation le taux de coagulation des protines, et donc de la rhologie, avec les
facteurs du procd.
Nous avons ici analys visuellement les courbes de granulomtrie. Cela reste
faisable car la quantit de modalits, et donc de courbes, est faible. Quand nous
aurons des images dirents moments du prcd et avec plusieurs facteurs
(concentrations des produits, etc.), il sera plus dicile de trouver les tailles
dlments structurant pour lesquelles les dirences de variations de granulo-
mtrie sont signicatives. Nous utiliserons alors des mthodes de statistiques
exploratoire comme lanalyse en composante principale et lanalyse de variance.
5 Analyse des textures de gel neutre
Le procd de fabrication de gel neutre du laboratoire de lINRA de Nantes
est le suivant :
Composition de la partie 1 Eau
Carraghnannes
Protines
Sucre
Composition de la partie 2 Permat de lait
Eau
Protines
Lipides
Traitements 1. Traitement thermique 90
o
de la partie 1 : gonement de
lamidon
2. mulsion 60
o
de la seconde partie suivie dun homognisation
3. Mlange chaud (90
o
) des deux parties avec cisaillements peu violents :
formation de la microstructure
4. Refroidissement : formation du gel
5.1 Les donnes
Les images fournies par lINRA de Nantes sont prises en microscopie confo-
cale. Deux des composs sont marqus : les globules gras et les protines. Chacun
uoresce donc lorsquil est clair par une certaine longueur donde du laser du
microscope. Limage rsultante est alors constitue de deux canaux que lon
considre comme les deux premiers canaux dune image RGB.
les globules de gras sont visibles en clair sur le canal R(ed), tandis que les
grains damidon et les protines en agrgats et en solution apparaissent
en sombre.
les protines sont visibles en clair sur le canal G(reen), tandis que les
globules de gras et les grains damidon sont visibles en sombre.
Linterprtation de limage complte est donc la suivante :
en rouge : les globules gras
en vert clair : les protines
en vert fonc : la solution (contenant en autre les protines dilues)
en sombre : les grains damidon
Les images ont t prises la n de procds pilotes, deux niveaux de zoom
dirents (cf gure 13).
(a) (b)
Fig. 13: Images de gels neutres aprs fabrication : (a) zoom 5 20, (b) zoom
5 40
Ce que lon cherche caractriser Nous allons chercher caractriser deux
aspects dirents lis aux paramtres rhologiques.
Dabord, de la mme faon que pour les gels acides, nous allons essayer de
quantier lespace libre du gel, cest dire lespace entre les grains damidon.
Selon la fraction volumique et la largeur de la structure constitue par cet espace,
les autres particules auront des potentiels de diusion dirents, qui pourront
ensuite tre relis des caractristiques physiques.
Ensuite nous chercherons caractriser les organisations relatives entre les
dirents composs. Nous essaierons de dterminer sil y a une distance ca-
ractristique entre les direntes phases. Si cest le cas, nous essaierons de la
quantier.
5.2 Analyse dimage
Pour caractriser les espaces libres du gel, nous utiliserons les outils de gra-
nulomtrie. Mais comme les images sont constitues de trois phases et que nous
ne voulons nen considrer que deux lamidon et le reste, nous pr-traiterons
limage an de pouvoir faire de la granulomtrie binaire.
Ensuite nous tudierons les organisations relatives entre structures laide de
la covariance et de la covariance croise. Cela ncessite aussi un pr-traitement
de limage. La mthode destimation de covariance utilise est celle reposant
sur un vecteur porteur pour des contraintes de temps de calcul. Les covariances
obtenues dans les directions verticale et horizontale sont moyennes.
Pr-traitement : segmentation La segmentation des images se fait par seuillage
sur les deux canaux. Les seuils sont dtermins de manire empirique pour chaque
image. Une nouvelle image ne contenant que quatre couleurs (fond, protines,
globules gras et amidons) est construite (cf gure suivante). En post-traitement
de la segmentation, on fait une fermeture de la phase amidon pour reboucher les
trous de petite taille qui apparaissent sur les grains.
lipides protines
amidon
RGB
Caractrisation de lespace inter-granulaire Pour tudier lespace du gel laiss
libre par lamidon, nous eectuons une fermeture de cette phase, cest dire une
disparition progressive de lespace inter-granulaire. Les rsultats sont prsents
gure 14 page suivante.
Les drives de la granulomtrie prsentent un aspect intressant. Elles nous
permettent de sparer les gels en deux groupes. Les deux premires, celles cor-
respondants aux gels en zoom 520 prsentent chacune un pic. Celui du premier
gel (image 13(a)) est trs marqu. Il est centr autour de 8 20 pixels ce qui
donne une estimation de la largeur caractristique de la structure de la phase
complmentaire de lamidon. Ce constat est corrobor par lobservation visuelle
de la texture qui laisse penser que les grains damidon sont proches les uns
des autres et donc que lespace libre est rduit et de faible largeur. On remarque
aussi, de faon moins nette, un pic sur limage du deuxime gel en zoom 5 20.
Cela met tout de mme en vidence une largeur signicative despace libre. En
revanche la dcroissance qui suit le pic est plus faible : la distribution en largeur
de lespace vide nest pas aussi centre.
Les deux courbes correspondantes aux images de gels en zoom 5 40 ne
prsentent pas de pic, quelle que soit la taille de llment structurant utilis
(hormis un bruit agrant pour la taille maximale). La distribution en largeur des
espaces laisss libres par lamidon est disperse. Ce phnomne est corrobor par
0
1
2
3
4
5
6
7
8
0 10 20 30 40 50 60 70 80 90 100
v
o
l
u
m
e
taille de llment structurant
creme5x20BpyAl546Seg.tif
creme5x20z2BpyAl546Seg.tif
creme5x40BpyAl546Seg.tif
creme5x40BpyAl546zone2Seg.tif
Fig. 14: granulomtrie chelle en pixels : fermeture de la phase amidon
une observation visuelle de limage 13(b) : la concentration en amidon semble
faible et aucune organisation de cette phase na lair de stre mise en place. La
phase complmentaire nest donc pas organise non plus.
Ces informations sont intressantes car elles permettent dobtenir une in-
formation quantitative de la largeur caractristique de lespace libre quand cet
espace est organis. Des mesures de ce type peuvent tre mises en corrlation
avec des potentiels de diusion de particules an dapporter des informations sur
la structure du gel et donc de sa rhologie. Lorsque lespace libre nest pas aussi
organis, nous obtenons toutefois une distribution des largeurs de cet espace qui
peut savrer utile.
Caractrisation de lorganisation inter-structurelle Nous allons essayer de carac-
triser lorganisation des grains damidon dans limage ainsi que lorganisation
des protines par rapport lamidon (cf gure 15 page suivante).
Le graphe 15(a) prsente la covariance simple de la phase amidon et sa valeur
de rfrence associe pour chaque image de gel neutre. Les courbes montrent
peu prs toutes la mme volution de la covariance : elles dcroissent assez
rapidement vers la valeur de rfrence puis sy stabilisent. Seule la covariance du
dernier gel prsente ensuite une volution : un pic trs arrondi autour de 150
250 pixels avec une covariance suprieure la valeur de rfrence. On pourrait
linterprter comme une distance privilgie entre les grains damidon si le pic
tait plus marqu et si les grains damidon taient moins dforms. De plus, nous
navions pas russi dterminer une largeur despace libre caractristique pour
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0 50 100 150 200 250 300 350 400 450
distance (pixel)
AMoyencreme5x20BpyAl546Seg
Rvaluecreme5x20BpyAl546Seg
AMoyencreme5x20z2BpyAl546Seg
Rvaluecreme5x20z2BpyAl546Seg
AMoyencreme5x40BpyAl546Seg
Rvaluecreme5x40BpyAl546Seg
AMoyencreme5x40BpyAl546zone2Seg
Rvaluecreme5x40BpyAl546zone2Seg
(a)
0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0 50 100 150 200 250 300 350 400 450
distance (pixel)
(b)
Fig. 15: Organisation des structures de gels neutres : (a) covariance simple de
la phase amidon, (b) covariance croise des phases amidon-protine
ce gel. La covariance de la phase amidon ne nous apporte donc pas, premire
vue, dinformations que lon puisse mettre en relation avec la rhologie.
Une explication est que la fraction volumique de lamidon est tellement leve
entre 30 et 45% et la forme des grains trs irrgulire que la probabilit que
deux points spars par une distance suprieur 50 pixels appartiennent la
phase amidon est quasiment identique en toute rgion de limage.
Le graphe 15(b) prsente lorganisation relative des grains damidon avec les
protines. Les deux images de gels en zoom 5 40 montrent clairement un pic
suivant la croissance initiale. Il y a donc beaucoup de protines situes une
distances de 75 150 pixels des grains damidon. Les pics qui suivent apportent
des informations de moins en moins ables, leur interprtation est donc sujette
caution. En revanche, les deux autres gels ne montrent pas clairement de pic
suivant la premire croissance de la covariance, en particulier pour le premier. On
pourrait donc penser que cela met en vidence labsence dorganisation spcique
entre les deux structures.
Mais les variations des courbes prsentes sur cette gure relativisent le cr-
dit que lon peut accorder leur interprtation. Cela sexplique par la fraction
volumique trs faible des protines. Les limites de ces outils sont encore plus
agrantes lorsquon tudie la covariance croise protines-globules gras. La co-
variance, qui semble bien fonctionner sur des images synthtiques est donc prise
en dfaut.
6 Conclusion et perspectives
Dans ce rapport, nous avons prsent les mthodes danalyse de textures
qui semblaient les plus adaptes notre problmatique. Nous avons apport des
contributions, en termes doutils mais surtout de mthodes. Aprs avoir analys
les premiers rsultats, il convient den faire un bilan. Nous parlerons ensuite des
travaux qui continueront pendant le mois et demi quil me reste travailler sur
ce sujet et enn des perspectives ouvertes par mon stage.
6.1 Bilan des outils
Plages de pixels et matrices de cooccurrences Les plages de pixels et les matrices
de cooccurrences sont rapides mettre en vres, cest pourquoi elles sont trs
utilises pour analyser et caractriser des textures. En particulier, les matrices
de cooccurrences font gure de rfrence dans la littrature. Les attributs syn-
thtiques que fournissent ces deux outils ne sont pas tous vidents interprter,
mais ils permettent quand mme dexpliquer des phnomnes que nous pouvons
relier la rhologie du gel.
Par construction, les plages de pixels dcrivent un dcoupage qui se fait ind-
pendamment des structures qui nous intressent. Les matrices de cooccurrences
prennent en compte toutes les transitions de niveaux de gris des images. On ne
peut donc pas choisir dtudier les structures claires ou les structures sombres
dune image. Les informations sont mles, ce qui ncessite lutilisation conjointe
dautres mthodes danalyse pour interprter correctement les rsultats.
Notre principale contribution ces deux mthodes est la suivante : nous avons
choisi de ne pas xer le paramtre principal seuil ou longueur du vecteur de
loutil. Nous nous passons ainsi du besoin de connaissance a priori dune taille
caractristique de particule et donc de subjectivit. Lanalyse de lvolution des
attributs permet de trouver rapidement quelles sont les valeurs de paramtre
les plus adaptes pour discriminer des images ou encore les plages de valeurs
pour lesquelles leur comportement sont semblables. Nous pourrons caractriser
ces courbes par une pente lorigine ou une exponentielle et ainsi utiliser des
mthodes dexploration statistiques ne dpendant plus du choix dun oprateur
humain.
Une autre contribution aux plages de pixels est le parcours en fractal de
Hilbert. Il semblait sduisant sur le principe mais nous navons pas not dam-
lioration en terme de discrimination dimages qui reste un des points faibles de
cet outil. En revanche son caractre relativement isotrope d au taux lev de
voisinages conservs lors de la linarisation de limage permet de ne pas avoir
besoin de moyenner les attributs obtenus par dirents parcours. Cest donc un
gain de temps pour traiter des collections importantes dimages.
Covariance Lanalyse par covariance est la seule mthode qui nous donne accs
lorganisation spatiale des constituants des gels lacts. En revanche les rsultats
ne sont pas encore la hauteur des esprances. Il serait sans doute judicieux
dutiliser aussi des mthodes danalyses statistique spatiale ne dpendant pas de
la surface occupe par une particule mais uniquement de leur dispersion spatiale.
Granulomtrie Loutil le plus prometteur semble tre la granulomtrie par mor-
phologie mathmatique. Cette mthode danalyse peut en eet sappliquer sur
des textures en niveaux de gris ou non. De plus, elle prsente lavantage de
donner le choix de la structure caractriser. On peut dterminer une taille
caractristique dagrgat de protine aussi bien que des trous du gel. De plus,
les rsultats sont faciles interprter. On peut les mettre rapidement en relation
avec des mesures de diusion de particules ou alors avec une taille caractristique
dagrgat. L encore, la mise relation avec des caractristiques physiques du gel
est facilite.
6.2 Perspectives
Les travaux en cours Lanalyse visuelle de nombreux attributs synthtiques ou la
recherche de corrlation entre des courbes nest ni vidente, ni objective. Cest
pourquoi nous nous sommes demand comment traiter correctement les nom-
breuses donnes extraites des images. Il nous a sembl que lutilisation doutils
de statistique exploratoire comme lanalyse en composante principale et lanalyse
de variance tait adapte. Il en va de mme pour des mthodes de datamining
comme le clustering. Ces outils requirent des donnes en quantit susante
pour fonctionner correctement, cest pourquoi nous navons pas montr leurs
applications.
De mme, une fois les images en quantit susante, nous pourrons valider
plus rigoureusement les outils, en travaillant sur des images rellement indpen-
dantes provenant dun mme chantillon de gel.
Implication des experts Les experts peuvent intervenir plusieurs niveaux dans le
processus de caractrisation de gels lacts. Trs en amont, ils peuvent nous aider
mieux comprendre ce quil y a dans les images, en particulier pour amliorer
la segmentation des textures de gels neutres. Cest aussi grce au travail entre
experts et modlisateurs que nous savons ce quil faut chercher caractriser.
Ce travail nest pas simple mais mrite dtre approfondi pour largir notre
champ de recherche. Enn, lintgration de connaissances expertes au sein mme
du processus de caractrisation, travers des rseaux baysiens par exemple,
permettrait sans doute de lamliorer.
A Annexe : Principes de base de lanalyse dimage
Dans cette partie nous prsenterons une vue globale du plan de travail gn-
ralement employ pour lanalyse dimage. Nous passerons sous silence la capture
dimage et sa transformation en un signal discret. Le lecteur pourra se reporter
[21] et [7] pour cette phase. Nous prsenterons comment, une fois les images
en main, on les pr-traite par lutilisation de ltres, en particulier pour rduire
le bruit d au dispositif dacquisition. Nous en proterons pour rappeler les
principes de base des ltres linaires (masques de convolution), non-linaires et
morphologiques (ouverture et fermeture) qui sont aussi utiliss pour la segmen-
tation et lanalyse. Puis nous aborderons rapidement la segmentation par le biais
des deux principales approches (bases rgion ou contour) qui abouti la parti-
tion dimages en rgions labellises. Enn, nous parlerons danalyse en voquant
quelques gnralits en vue dintroduire la partie 2.1.
Mthodologie gnrale Lanalyse dimage peut se rsumer comme laboutisse-
ment de trois tapes de travail, lesquelles partagent certains outils.
La premire tape regroupe ce quon peut appeler les pr-traitements. Ils
ont pour but de corriger les dfauts grossiers observs dans limage, comme les
aberrations chromatiques, pour obtenir des images sur lesquelles il sera plus
simple de travailler. Dautre part, lorsque lanalyse seectue sur une collection
dimages, cette phase est aussi importante pour les rendre comparables. On peut,
par exemple, taler les niveaux de gris de toutes les images de manire rgulire
de faon ce quils en couvrent toute la dynamique possible. Les outils utiliss
sont : les ltres, les modications dhistogramme et les corrections gomtriques.
La seconde tape est la segmentation. Cest une tape optionnelle puisquelle
dpend des mthodes danalyse que lon souhaite appliquer. En eet, elle est
inutile si lanalyse a lieu directement sur une images en niveau de gris alors
quelle sert de pr-traitement aux mthodes danalyse dimages labellises. Une
images labellise est une image partitionne en ensembles connexes de pixels.
Les outils utiliss font appel aux ltres, aux modles dhistogrammes et aux
mthodes de division/agrgation.
Enn, la dernire tape est lanalyse proprement dite. Cest la phase sur la-
quelle nous allons porter nos eorts. Une fois limage pr-traite, on peut vouloir
mesurer des tailles de particules, reconnatre des formes, discriminer des images
ou encore caractriser une texture. Les outils disponibles sont trs nombreux.
Une part du travail de lanalyste est donc de faire le choix des outils adapts
puis de les ajuster aux images quil doit traiter. On peut citer ltude de la co-
variance, des matrices de cooccurrence, de la granulomtrie, et parmi celles que
nous navons pas retenue : la strologie, les modles stochastiques ou encore
spectraux.
A.1 Filtrage
Aucun systme dacquisition dimage nest parfait : les lments optiques
ont, au mieux, des lgers dfauts, les capteurs numriques sont tellement n
quils sinterfrent les uns les autres, la discrtisation dun signal ncessite une
approximation, etc. Cest pourquoi une image contient toujours des pixels dont
les niveaux de gris sont des aberrations par rapport aux niveaux de leurs voisins :
cest le bruit.
Les ltres sont des outils de traitement dimage dont les domaines dappli-
cations sont nombreux. En eet, ce sont des outils trs gnriques : certains
ont vocation d-bruiter une image tandis que dautre servent dtecter des
contours dobjets.
Un ltre dimage est une fonction gnrant une image I
2
partir dune image
originale I
1
. On considre gnralement quil en existe deux sortes :
un ltre est linaires lorsque la valeur du pixel I
2
(i, j) est une combinai-
son linaire des voisins du pixel I
1
(i, j), la notion de voisinage restant
prciser. En pratique, on manipule des ltres indpendants du temps
(ie stationnaire sur toute limage) ce qui permet dutiliser le produit de
convolution, not , dune image par un noyau ou masque. Cest le cas des
ltres gaussien, moyenneur, etc (cf A.1).
les ltres non-linaires comme le ltre mdian mais aussi les oprateurs
bass sur la morphologie mathmatique (cf A.1 et A.1).
Filtres linaires
Denition 11. Pour une image I
1
, lexpression de la convolution par un noyau
K de dimension (2p + 1)
2
est :
I
2
(i, j) =
2p
k=0
2p
l=0
I
1
(i +k p, j +l p)K(k, l)
Conservation de la dynamique de limage La dynamique de limage est employe
pour dcrire la plage de niveaux de gris comprise entre le minimum et le maxi-
mum des niveaux de gris de limage.
Denition 12. Soit un noyau K de dimension k
2
, si on a :
1. (i, j) k
2
, K(i, j) 0
2.
k
i=1
k
j=1
K(i, j) = 1
alors on dit que le masque de convolution de noyau K conserve la dynamique de
limage.
Les noyaux de ce type sont en gnral employs pour rduire le bruit. Cela
permet de pouvoir appliquer ensuite des algorithmes danalyse dont les rsultats
seront moins biaiss. Deux exemples sont prsents table 1 page suivante : le
ltre moyenneur donne un pixel la moyenne des niveaux de gris des pixels
de son voisinage. Il a tendance rendre ou les frontires entre les dirents
lments de limages. Le ltre gaussien part du principe que plus le voisin dun
pixel est proche de celui-ci, moins la valeur de son niveau de gris en est dirente.
Il corrige donc lui aussi le bruit de limage mais en outant moins les frontires.
Gestion des eets de bords Lutilisation de masque de convolution ncessite de
rchir sur la faon de lappliquer aux pixels situs aux bords de limage. Il
existe plusieurs stratgies mais aucune nest parfaite [3], en voici quelques unes :
ignorer les bords : mais il ny aura alors aucun traitement sur ceux-ci,
mme biais
considrer que tous les pixels (inexistants) hors de limage ont le mme
niveau de gris. Celui-ci peut tre choisi comme blanc, noir, la moyenne de
tous les niveaux de gris de limage, la mdiane, etc.
considrer les pixels (inexistants) hors de limage comme une rexion de
ceux de limage par rapport la frontire
considrer le niveau de gris dun pixel (inexistant) hors de limage comme
le niveau de gris du plus proche pixel sur la frontire
2
4
1 1 1
1 1 1
1 1 1
3
5
1
9
(a)
2
4
1 2 1
2 4 2
1 2 1
3
5
1
16
(b)
Tab. 1: Exemples de deux masques de convolution conservant la dynamique de
limage : (a) ltre moyenneur 3 3 de connexit 8, (b) ltre gaussien 3 3
Modication de la dynamique de limage Lutilisation dun masque de convolu-
tion modiant la dynamique de limage ncessite de normaliser limage gnre
pour pouvoir la visualiser. Quand on travail sur 8 bits, les niveaux de gris des
pixels de limage sont entre 0 et 255. Cest en quelque sorte un compression de
lhistogramme. Limage rsultante peut ainsi tre interprte. Une grande famille
de ce type de masque de convolution sont les oprateurs de dtection de frontire
que nous tudierons plus loin (cf A.2).
Proprits intressantes Les masques de convolutions ont une proprit intres-
sante qui est la distributivit : si on veut appliquer une image plusieurs ltres
de taille de noyaux identiques, on peut calculer limage rsultante en une seule
passe (exemple table 2) par le masque de convolution somme de tous les ltres.
Un exemple est celui de laddition dune image ayant subit un ltrage de Laplace
(dtection de frontire) loriginale de limage. Cela produit un rhaussement
des contours des objets.
2
4
0 0 0
0 1 0
0 0 0
3
5
(a)
+
2
4
0 -1 0
-1 4 -1
0 -1 0
3
5
(b)
=
2
4
0 -1 0
-1 5 -1
0 -1 0
3
5
(c)
Tab. 2: Illustration de la distributivit des masques de convolutions : (a) masque
de convolution de recopie, (b) ltre laplacien, (c) ltre de rhaussement de
contours
Une autre proprit intressante est la sparabilit du masque de convolu-
tion. Elle ne concerne pas la totalit des ltres par convolution mais possde
un avantage en terme de complexit, surtout pour les ltres de grande taille.
La complexit dun ltre de convolution de masque de dimension k k sur une
image de dimension hl est en O(k
2
) (hl kk oprations). Le ltre gaussien
3 3 dont nous avons dj parl plus haut peut se sparer en deux vecteurs :
1 2 1
2 4 2
1 2 1
1
2
1
1 2 1
, o est loprateur de convolution.
On peut donc ltrer une image en deux passes en nutilisant quun vecteur par
passe. La complexit devient donc en O(k) (hl 2k oprations). La proprit
de distributivit peut aussi tre utile pour sparer des masques. Nanmoins de
nombreux masques de convolution ne sont pas sparables et lorsque leur taille
est assez grande, on utilise la transforme de Fourier rapide pour acclrer les
calculs (cf A.3) en appliquant la convolution dans lespace des frquences.
Dilatation et rosion La dilatation et lrosion sont des oprations bases sur
la thorie des ensembles et en particulier sur les oprations de Minkowski qui
dcrivent laddition ou la soustraction dun lment un ensemble [30]. Pour les
bases ncessaires, le lecteur pourra se reporter [21].
Notation 4 Nous noterons la rexion dun ensemble E par E. Rappelons
quelle est dnie par :
E = {e|e E}
Si E = E, on dit que E est symtrique.
Laddition de Minkowski, ou translation de lensemble E par llment t est
dnie de la faon suivante : A = E + t = {e + t|e E}. On la gnralise
laddition de deux ensemble E
1
et E
2
comme suit :
A = E
1
E
2
=
(E
1
+e
2
|e
2
E
2
) =
(E
2
+e
1
|e
1
E
1
) = {x|(E
2
+x)E
1
= 0}
en introduisant la notion de point central de lensemble E
2
. Ce dernier est alors
appel lment structurant. Pour une image binaire, on peut exprimer dun point
de vue ensembliste la dilatation dun ensemble E par un lment structurant S
comme lensemble des points tels que, quand S est centr sur chacun de ces
points, E S = {}. On peut transposer cela facilement au cas dune image en
niveaux de gris : la dilatation dune image par un lment structurant S se fait
en mettant le niveau de gris du point central de S au maximum des intensits
des pixels couverts par S [21].
De mme, lrosion dun ensemble par un lment structurant symtrique se
base sur la soustraction de Minkowski A = E
1
(E
2
) =
{E
1
+e
2
|e
2
E
2
}.
Lorsque E
2
est symtrique on peut crire :
A = E
1
E
2
=
(E
1
e
2
|e
2
E
2
) = {x|(E
2
+x) E
1
= 0}
Pour une image binaire, on peut exprimer dun point de vue ensembliste lrosion
dun ensemble E par un lment structurant S comme lensemble des points tels
que, quand S est centr sur ce point, E S = S, i.e. S est compltement inclus
dans E. On peut transposer cela facilement au cas dune image en niveaux de
gris : lrosion dune image par un lment structurant S se fait en mettant
le niveau de gris du point central de S au minimum des intensits des pixels
couverts par S [21].
En regardant les dnitions de dilatation et drosion, on voit quil y a une
forte relation de dualit entre les deux. On a E S = (E
c
(S))
c
et E S =
(E
c
(S))
c
.
Ces deux oprateurs permettent, entre autre, de rduire le bruit dune image
comme on peut le voir gure 16(b), en considrant que les lignes nes de limage
originale constituent le bruit. En eet, toutes les rgions plus petites que ll-
ment structurant disparaissent. Mais on constate que tous les objets de limage
ont subit laction de cet oprateur. On peut les restaurer en partie avec le second
oprateur (cf gure 16(d)).
(a) image binaire originale (b) image dilate
(c) image rode (d) image rode puis dilate (ouver-
ture)
Fig. 16: Illustration des oprateurs de dilatation et drosion par le disque de
rayon 1 discrtis par une croix.
Ouverture et Fermeture
Denition 13. L ouverture morphologique
S
est dnie par : (E S) S
Comme montr dans lexemple de la gure 16, louverture morphologique fait
disparatre les structures nes et les petits dtails (relativement la taille de
llment structurant) et arrondi les sommets des objets. Cest donc une opra-
tion intressante pour diminuer le bruit dune image mais dont le rsultat dpend
de llment structurant utilis (forme et taille).
Denition 14. La fermeture morphologique
S
est dnie par : (E S) S
Lors de la dilatation, les structures proches sont fusionnes et seules les fusions
assez larges (relativement la taille de llment structurant) sont conserves.
Une des consquences est que les petits trous sont rebouchs [21].
Denition 15. Une transformation T est un ltre morphologique si et seule-
ment si elle est croissante et idempotente.
Rappelons quun treillis complet L muni de loprateur (ie est une applica-
tion de L dans lui-mme) est :
croissant si x, y L, x y (x) (y)
extensif (resp. anti-extensif) ssi x L, x (x) (resp.x (x))
idempotent ssi x L, (x) = ((x))
On voit que la fermeture est un ltre morphologique extensif tandis que louver-
ture est un ltre morphologique anti-extensif [30].
On retrouve une forte relation de dualit entre ouverture et fermeture qui
sexprime comme suit :
S
(E) = (
S
(E
c
))
c
et
S
(E) = (
S
(E
c
))
c
, o S est
llment structurant.
Les ltres morphologiques douverture et de fermeture sont trs intressants
pour enlever un bruit ou un objet de forme spcique dune image. En eet on
peut dnir toutes sortes dlments structurants selon leur forme (symtrique
ou non, connexe ou non, etc.) et leur taille. Il sut ensuite de les appliquer
les uns aprs les autres pour traiter spciquement certains types dobjets. Les
ltres morphologiques sont aussi trs utiliss en granulomtrie (cf 2.4) et la
base dune mthode de segmentation (cf A.2).
A.2 Segmentation
La segmentation est un traitement dont le but est de partitionner une image
en ensembles de pixels appeles rgions [5]. Ce nest pas un but en soit mais un
traitement en aval de lanalyse de limage. partir dune image I, on crer une
famille de sous-ensembles R
i
tels que :
i, R
i
=
i, j, R
i
R
j
=
i
R
i
= I
Une rgion est un ensemble connexe de pixels ayant des proprits communes
(niveaux de gris, texture, etc.) qui les direncies des rgions voisines. On peut
parfois regrouper les rgions par classes dans le but didentier les occurrences
dune entit sur limage (identier les neurones, les grains damidon, etc.). En
sinspirant du processus de perception visuelle de lhumain, on a donn naissance
deux approches couramment appeles approche rgion et approche frontire.
La notion de rgion fait rfrence des voisinages de pixels aux proprits
similaires ce qui conduit une partition directe de limage puisque chaque pixel
est aect une rgion. La notion de frontire, au contraire fait rfrence au
phnomne de discontinuit de proprits entre les pixels sparant deux rgions.
On retrouve dans cette approche les mthodes de dtection de contours. On
a dualit entre rgion et contour seulement en cas de contours ferms ce qui
demande la plupart du temps du travail.
Nous allons commencer par prsenter le principe des mthodes de segmenta-
tion par seuillage qui est une mthode de classication utilise pour segmenter
une image.
Seuillage La segmentation par seuillage sappuie sur lhypothse que les objets
peuvent tre distingus du fond ou entre eux par leurs niveaux de gris. Cest
en fait une mthode en deux temps. On commence par une classication mono
dimensionnelle : les classes sont construites partir des niveaux de gris des pixels
sans tenir compte de leur distribution spatiale. Puis on construit les rgions en
extrayant de limage les composantes connexes de pixels appartenant la mme
classe [5]. Le choix de n seuils implique donc la partition de lhistogramme en
n + 1 classes. La plupart des auteurs classent les mthodes en deux familles :
les mthodes paramtriques et les mthodes non-paramtriques comme la m-
thode dOtsu [24]. Nous aborderons ici trs succinctement le principe gnral
des mthodes paramtriques.
Le choix des seuils inter-classes Le point dachoppement des mthodes de seuillage
est lidentication des seuils inter-classes. On cherche en gnral les minimums
locaux de la fonction histogramme qui peut avoir subit des amliorations, par
exemple par approximation. Mais en pratique, ces minimums peuvent tre trs
dicile trouver cause du bruit de limage qui introduit beaucoup dirrgu-
larits dans la courbe, des modes qui ne sont pas trs clairs, ou encore de la
prsence dun seul mode.
On peut alors essayer de modliser lhistogramme par une somme pond-
re de distributions, en gnral gaussiennes. Une multitude de mthodes a t
dveloppe, nous ne citerons que deux exemples :
les seuils sont localiss par les sparateurs des distributions pour la m-
thode de Fisher [11]. Elle a linconvnient de devoir connatre a priori le
nombre de classes dtecter
la mthode de Bhattacharya [2] identie les modes de lhistogramme et le
nombre de classes sans supervision
On peut aussi citer une approche oriente optimisation de la segmentation [24].
Nous ne dtaillerons pas ces outils mais il faut garder lesprit quen pratique,
pour des raisons lies aux dicults techniques, on a majoritairement recours
la binarisation, parfois avec des masques. Cest dire quon choisit de segmenter
limage en deux classe (n = 1) : la classe fond de limage et la classe objet .
On peut voir gure 17 page suivante limportance du choix de la valeur du seuil
pour lexploitation dune image. Les pixels noirs (classe objet) de limage 17(c)
ne reprsentent que 56% des pixels noirs de 17(d).
Les mthodes de seuillage ont le gros inconvnient de ne pas prendre en
compte la distribution spatiale des pixels et donc de la connexit des pixels
dans une rgion. On peut tenter de pallier ce dfaut par un travail sur les
(a) image originale en niveaux de gris
0 50 100 150 200 250
0
1000
2000
3000
4000
5000
6000
7000
(b) histogramme de limage
(c) seuil = 100 (d) seuil = 175
Fig. 17: Illustration de la segmentation dune image en deux classes par seuillage
histogrammes locaux ce qui est un dbut pour tudier un pixel et son voisinage.
Pour dvelopper cette ide, on introduit lapproche base rgion.
Approche rgion Les mthodes de segmentation bases rgions partitionnent
une image en rgions suivant un critre dhomognit. Elles sont particulire-
ment employes dans le cas dhistogrammes multi-modaux et donnent alors de
meilleurs rsultats que la segmentation par seuillage [15]. Nous parlerons de deux
mthodes dites structurales que sont la colonisation, ou agrgation de pixels, et
la division-fusion. En revanche, nous naborderons pas celles bases sur les mo-
dles comme les champs de Markov. Le lecteur pourra se reporter [5] pour une
tude dtaille ce propos.
Colonisation La colonisation est un processus itratif dpendant de trois para-
mtres : un critre dhomognit prdni, un ensemble de germes et un critre
darrt.
Le critre dhomognit est un prdicat sur un ensemble de pixels connexes.
Ce peut tre une heuristique trs simple, par exemple : un pixel est agrg une
rgion si la dirence entre son niveau de gris et le niveau de gris moyen de la
rgion ne dpasse pas un certain seuil. Ce peut tre aussi un attribut de texture
plus volu (cf 2.3) ou une caractristique gomtrique comme la convexit [4].
Ce paramtre est choisi en fonction des caractristiques de limage traiter et
des objets segmenter.
Les germes sont lensemble de pixels de dpart. Il doivent tre judicieusement
choisi en nombre, taille (ponctuel ou non) et dispersion spatiale, par exemple
dans les zones o la variance est faible [24]. Les rgions croissent pixel par pixel
jusqu atteindre le critre darrt. Celui-ci correspond en gnral :
soit tous les pixels de limage sont aects une rgion
soit aucune rgion ne peut accueillir de pixels non aects en satisfaisant
le critre dhomognit
Selon le cas dans lequel on se trouve, on peut avoir dcider que faire des pixels
non-aects (en faire une classe part, les assimiler au fond de limage, les
agrger des rgions suivant un nouveau critre, etc.). Comme les rgions sont
de tailles croissantes et bornes, la convergence est assure au bout dun nombre
ni ditrations [5].
Un inconvnient de cette mthode est la dicult dune initialisation opti-
male (dans le sens de la qualit de la segmentation obtenue). En eet, le nombre
de rgions doit tre connu a priori. Cest l que les mthodes de division-fusion
prennent tout leur intrt.
Division-Fusion La division-fusion se droule en deux phases. La premire, la
phase de division est un processus rcursif dpendant de deux paramtres : un
critre dhomognit prdni qui est un prdicat sur un ensemble connexe
de pixels, et une heuristique de division. Le second, la phase de fusion est un
processus itratif qui est paramtr par le mme critre dhomognit et un
critre darrt.
Phase de division Le principe rcursif guidant la phase de division est expos
en algorithme 2. La rgion initiale est forme par limage entire.
Algorithme 2 : division(R, H, D)
Entres : rgion R, critre dhomognit H, heuristique de division D
si R ne satisfait pas H alors
partitionner R en sous-rgions Ri selon D;
pour tout i faire
division(Ri, H, D);
n
n
Le critre dhomognit ayant dj t abord (cf A.2 et A.2), nous allons
nous intresser lheuristique de division. Larbre quaternaire est souvent utiliser
pour raliser la division [24]. Cela suppose de travailler avec un masque danalyse
carr. La division dune rgion correspond sa partition en quatre carrs de
mme ct. Les rgions sont les nuds de larbre, de degr 5 pour une rgion
non homogne et de degr 1 sinon. Dautres heuristiques de division ont t
labores comme les diagrammes de Vorono [5] mais les eorts se portent en
gnral plus sur ltape de fusion.
Phase de fusion La phase de fusion consiste au regroupement de rgions voisines
de manire respecter le critre dhomognit. Dans le cas de lutilisation dun
arbre quaternaire, on parcourt lensemble des couples de rgions voisines. Luti-
lisation dun algorithme de fusion glouton, ie qui fusionne deux rgions voisines
dont lagglomration respecte de critre dhomognit sans remettre en cause
ce choix, nest pas forcment indique car il y a un grand nombre de possibilits
de fusions. On peut donc rendre ce processus multi-critres en y ajoutant une
fonction de qualit minimiser [23].
Nous voquerons enn les approches de type pyramidales qui ne concernent
que la fusion. Limage est reprsente sous forme de graphe dont les sommets sont
les rgions et les arrtes les relations de voisinage. Les mthodes de pyramides
stochastiques, adaptatives ou encore duales [24] essaient de rduire ce graphe
par agglomrations successives de sommets.
Approche frontire Les mthodes de dtection de frontires par ltres li-
naires sont bases sur un parcours de limage dans une ou plusieurs directions.
On tudie les variations des drives premire ou seconde des niveaux de gris.
On peut aussi utiliser des mthodes bases sur la morphologie qui permettent
dextraire un contour moyen dun objet.
Oprateurs linaires de dtection de bordures Comme nous lavons introduit
plus haut (cf A.1), les masques de convolutions permettent dappliquer un
ou plusieurs ltres linaires une image en un certain nombre de passes. Un
exemple bien connu est construit partir des trois vecteurs : (-1, 0, 1), (1, 2, 1)
et (-1, 2, -1). Il est compos de neuf noyaux qui sont toutes les possibilits de
multiplications deux deux de ces vecteurs [18]. En particulier, deux noyaux
sont connus comme oprateur de Sobel qui est un oprateur de dtection de
contours ecace [34] (cf gure 18 page suivante).
2
4
1 2 1
0 0 0
-1 -2 -1
3
5
(a)
2
4
-1 0 1
-2 0 2
-1 0 1
3
5
(b)
Tab. 3: Oprateur de Sobel en deux masques de convolution
(a) image originale en niveaux de gris (b) frontires des objets
Fig. 18: Illustration de la dtection de frontire avec loprateur de Sobel
Cet oprateur dtecte les frontires selon deux directions. Avec les puissances
des ordinateurs actuel, on peut construire selon le mme principe des oprateurs
de dtections de frontire selon de multiples directions comme celui de Kirsh qui
travail sur huit directions [21]. Ils mlent en gnral rduction de bruit et dtec-
tion par drive premire ou seconde. On peut par exemple citer les oprateur
de Laplace, de Deriche, de Cany, de Huertas-Mdioni, etc. [5].
Mthode du gradient morphologique Le gradient morphologique dune image se
construit laide des oprateurs drosion et de dilatation (cf A.1). En eet,
par construction, ils peuvent servir dtecter les contours des objets prsents
dans une image. Les contours intrieurs des objets dune image I sobtiennent par
I/(IS) tandis que les contours extrieurs sobtiennent par (IS)/I. Le contour
moyen, appel gradient morphologique, sobtient par (I S)/(I S). Le gradient
morphologique permet donc de dtecter les contours des objets prsents dans
limage. Cest une mthode performante dans le cas de segmentation dobjets
puisque le contour obtenu est ferm. En revanche, dans le cas dune segmentation
dimage dont les rgions sont plus htrogne (cf gure 19 page ci-contre), les
contours ne le seront pas ce qui implique un travail en aval.
A.3 Analyse
Lanalyse de limage est dicte par le but que poursuit lanalyste. Cest un
domaine trs large qui sappuie sur les mthodes de ltrage et de segmentation
dont nous avons prsent quelques exemples. Le grand public associe gnrale-
ment lanalyse dimage la reconnaissance de forme mais il ne sagit que dune
des nombreuses disciplines couvertes. On peut aussi citer comme exemples : le
contrle qualit dans la production mtallurgique [7], la caractrisation de la
tendret de viandes bovine [20], laide la dcision pour le diagnostic de mala-
dies rnales [31], la reconnaissance de visage dans une collection de photos [33],
(a) image originale en niveaux de gris (b) gradient morphologique
Fig. 19: Illustration du gradient morphologique par une image TEM de globules
gras de gel prsure lment structurant : disque de rayon 1 discrtis par une
croix.
lanalyse quantitative dimage de crmes de fromage [10], lextraction de points
communs plusieurs images [1] ou encore la compression dimage [21].
Nous allons prsenter quelques principes danalyse sans rentrer dans les d-
tails. Les outils que nous utiliserons pour rsoudre notre problmatique seront
dtaills dans la partie 2.1.
Mesures physiques La photographie permet de xer une approximation dune
image de la ralit ou, par lutilisation de la microscopie, de rendre observable
des chelles qui ne le sont pas lil nu. Le systme visuel de lhumain est
adapt une interprtation qualitative des images mais on a souvent besoin
dune analyse quantitative. On peut par exemple vouloir dterminer le diamtre
moyen des grains damidon dans un gel. Pour cela, une fois ceux-ci clairement
identis (cf A.2), il faut utiliser un protocole de mesure sans biais et raliste.
En eet, travailler sur une reprsentation discrte dun objet continu implique
de contrler lerreur de mesure faite. On peut voir gure 20 page suivante des
taux derreurs induits par des protocoles de mesure nafs.
La strologie est une discipline adapte ce problme. Elle regroupe essen-
tiellement deux volets : le premier concerne les protocoles de mesure sans biais
dun point de vue statistique. Le second concerne lextrapolation des mesures de
dimension d pour estimer des caractristiques en dimension d +1. Par exemple :
le diamtre dduit dune longueur, ou encore la fraction volumique dduite de
laire. Cela se fait bien sr sous certaines contraintes fortes sur la mesure utili-
se (invariance par translation, compatibilit avec les similitudes, additivit et
continuit) et le milieu observ (milieu isotrope). Nous ne nous y attarderons
pas plus mais le lecteur pourra se reporter [25] pour une tude dtaille.
Fig. 20: Illustration des
taux derreurs de mesure
du primtre dun cercle
en fonction du protocole :
en bleu (courbe du bas),
on compte tout simple-
ment le nombre de pixels
constituants le cercle. En
vert (courbe du haut), on
compte +1 en cas de d-
placement vertical ou ho-
rizontal dun pixel au sui-
vant, et +
2 en cas de
dplacement en diagonale
0 100 200 300 400 500 600 700 800 900 1000
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
rayon du cercle (pixels)
e
r
r
e
u
r
d
a
p
p
r
o
x
im
a
t
io
n
d
u
p
r
im
e
t
r
e
(
%
)
Proprits statistiques On peut considrer une image comme un processus
alatoire discret I(p). Si p est x, alors I(p) est une variable alatoire pour
laquelle il est possible de dnir direntes grandeurs (statistiques densemble).
Dans une rgion donne, ou masque de mesure, on peut par exemple dnir les
moments despaces dordre n, lautocovariance, etc [5]. Nous dtaillerons cette
approche et lexploitation de ces grandeurs de A.3 2.3.
Le d est darriver extraire dune image des attributs statistiques pou-
vant tre mis en relation avec des grandeurs physiques ou tout autre paramtre
susceptible dtre inject dans un modle.
Approche modle Cette approche est base sur le fait quun modle gnrant
une texture peut aussi la synthtiser. En jouant sur les paramtres dun modle
mathmatique de type spectrale (cf A.3) ou fractal (cf A.3), on essai dapprocher
au maximum limage. Le vecteur des paramtres du modle caractrise donc
limage. Nous naborderons pas ici les modles stochastiques comme ceux bass
sur les champs de Markov. Le lecteur pourra se reporter [5] pour une tude
ce sujet. Enn, on peut prciser que ces outils sont surtout utiliss pour la
classication dimage.
Mthodes spectrale : les transformes On peut considrer une image comme un
signal en deux dimensions. Les outils de traitement du signal, comme lanalyse
spectrale, sont alors disponibles. Elles sont toutes bases sur le mme principe :
passer du domaine spatial au domaine frquentiel par le biais dune transforme,
et revenir au domaine spatiale grce la transforme inverse. Daprs les rsul-
tats dtudes psychophysiques, le cerveau fait lui aussi une analyse de frquence
des images. Cest donc peut-tre une bonne voie pour atteindre la qualit des
capacits humaine en reconnaissance dimage.
La plus connue des transforme est certainement celle de Fourier. Elle per-
met dexprimer un signal priodique comme une somme pondre de fonctions
sinusodales. De plus, on peut maintenant la calculer rapidement grce la Fast
Fourier Transform (FFT) [5].
La transforme en ondelettes est apparue plus rcemment et pallie quelques
limitations de la transforme de Fourier en introduisant par exemple lanalyse
multi-chelles de limage. Cest la plus puissante des transformes en ce qui
concerne la classication de textures [34].
Modles fractals Une texture peut tre vu comme une rptition de motifs de
mme nature alatoirement rpartis dans limage. Lapproche fractale permet
une mesure invariante par translation, rotation et mme changement dchelle.
La dimension fractal est un facteur li lvolution dune grandeur en fonction de
lchelle danalyse. Elle est fractionnaire et suprieur la dimension topologique
de lobjet tudi [26]. La dimension fractale dune image est lie sa rugosit.
Pour tudier plus aisment les fractales naturelles, on introduit la notion de
mouvement Brownien fractionnaire (fBm) qui permet de dcrire un processus
stochastique. Il est dni comme suit :
P(
v(t +t) v(t)
|t|
H
< y) = F(y), t, t
o F(y) est la distribution cumule dune densit de probabilit gaussienne, et
H le paramtre du fBm dni sur ]0, 1[
La dimension fractale nest pas susante en soit pour caractriser une tex-
ture car deux images trs direntes peuvent avoir la mme dimension fractale.
Cest en partie d au fait que les textures sont rarement vritablement des ob-
jets fractals : elles nont pas exactement la mme structure direntes chelles.
De plus, par construction, la dimension fractale est indpendantes de lanisotro-
pie dune image. Enn, dterminer cette mesure nest pas vident et il existe
direntes mthodes qui ne produisent pas les mmes rsultats.
Cest pourquoi lutilisation de modle fractal se fait en gnral conjointement
avec dautre mthodes de caractrisation de texture.
Histogramme Lhistogramme dune image dcrit la distribution en niveaux
de gris de ses pixels. On peut en extraire des statistiques du premier ordre tel
que la moyenne des niveaux de gris, la variance, et autres moments dordres.
Cela fournit une description trs simplie de limage puisque le distribution
spatiale des niveaux de gris nest pas prise en compte. Cette description nest
pas susante pour discriminer des textures mais elle peut y contribuer. En
particulier, ltude dhistogrammes locaux mle statistiques du premier ordre et
notion de distribution spatiale.
Ltude dun histogramme passe en gnral par la dtermination et la lo-
calisation des modes et des valles. Cela peut se faire de faon visuelle mais on
lautomatise par la modlisation en somme pondre de gaussiennes comme nous
lavons dj voqu (cf A.2).
B Parcours de Hilbert : algorithme
function out = hi l be r t ( n)
%HILBERT c a l c u l i t r a t i f d un parcours d une mat ri ce carre de
di mensi on n n
% par une f r a c t a l de Hi l b e r t . Le parcours e s t cod par
Freeman .
%
% S i ns p i r e du codage pr s ent dans :
% Al gori t hm 781: Generat i ng Hi l b e r t s SpaceFi l l i n g Curve by
Recursi on
% GREG BREINHOLT and CHRISTOPH SCHIERZ
% Swi ss Federal I n s t i t u t e of Technol ogy
%
% Author : Ol i v i e r Hibon (2010)
% INRA Pari sGrignon
% o l i v i e r . hi bon@gri gnon . i nra . f r
% c a l c u l du parcours s el on l e code f r a c t a l s ui vant :
% __ __ __
% | | |_| __| |__
%
% (1) (2) (3) (4) : e s t l e poi nt de depart
% i n i t i a l i s a t i o n du parcours f r a c t a l d une mat ri ce de
di mensi on 4 4 ( et ape 1)
path = [ 3 , 1 , 1 , 4 ] ;
% codeFr act al { i } = mot i f rempl acant i ( et ape n) a l et ape n
+1, i =1 ,2 ,3 ,4
codeFr act al = { [ 3 , 1 , 1 , 4 ] , [ 4 , 2 , 2 , 3 ] , [ 1 , 3 , 3 , 2 ] , [ 2 , 4 , 4 , 1 ] } ;
% nombre d i t r a t i o n s a f a i r e :
% 2^(1 + nbSt ep ) = n <=> nbSt ep = l og (n/2) / l og (2)
for nbStep=1: log ( n/2) /log ( 2)1
% rempl acement des mot i f s
newpath = zeros ( 1 , 4 si ze ( path , 2) ) ;
for i =1: si ze ( path , 2)
newpath ( 1 , ( i 1)4+1: i 4) = codeFr act al {path( i ) };
end
path = newpath ;
end
% t r aduct i on du chemin s el on l e codage de Freeman
codeFreeman = { [ 2 , 0 , 6 , 0 ] , [ 2 , 0 , 6 , 6 ] , [ 2 , 0 , 6 , 0 ] , [ 2 , 0 , 6 , 6 ] ; . . .
[ 6 , 4 , 2 , 2 ] , [ 6 , 4 , 2 , 4 ] , [ 6 , 4 , 2 , 2 ] , [ 6 , 4 , 2 , 4 ] ; . . .
[ 0 , 2 , 4 , 2 ] , [ 0 , 2 , 4 , 4 ] , [ 0 , 2 , 4 , 2 ] , [ 0 , 2 , 4 , 4 ] ; . . .
[ 4 , 6 , 0 , 0 ] , [ 4 , 6 , 0 , 6 ] , [ 4 , 6 , 0 , 0 ] , [ 4 , 6 , 0 , 6 ] } ;
pathFreeman = zeros ( 1 , 4 si ze ( path , 2 ) 1) ;
for l =1: si ze ( path , 2 ) 1
pathFreeman ( 1 , ( l 1)4+1: l 4) = codeFreeman{path( l ) , path(
l +1) };
end
% aj out du der ni er t ronon
f i n = codeFreeman{path( si ze ( path , 2) ) , 1};
pathFreeman ( 1 , si ze ( pathFreeman , 2) 2: si ze ( pathFreeman , 2) )
= f i n ( 1 , 1 : 3 ) ;
out = pathFreeman ;
Rfrences
1. H. Bay, T. Tuytelaars, and L. van Gool. Surf : Speeded up robust features. 2006.
2. C.G. Bhattacharya. A simple method of resolution of a distribution into gausian
components. Biometrics, 1967.
3. W. Burger and M.J. Burge. Digital Image Processing, An Algorithmic Introduction
Using Java. Springer, 2008.
4. J.M. Chassery and C. Garbay. An iterative segmentation method based on a
contextual color and shape criterion. IEEE Trans. on PAMI, 1984.
5. J.P. Cocquerez and S. Philipp. Analyse dimage : ltrage et segmentation. Masson,
1995.
6. P.A. Coquelin and J. Rabarisoa. La corrlation des images sur des balayages
fractals. ENST Cachan, 2004.
7. M. Coster and J.L. Chermant. Prcis danalyse dimage. Presse du CNRS, 1989.
8. C. Duby and S. Robin. Analyse en composantes principales. Institut national de
recherche agronomique - Paris Grignon, 2006.
9. A. Fardet, P.M. Baldwinn, D. Bertrand, D.J. Gallant, and J.L. Barry. Textural
image analysis of pasta protein networks to determine inuence of technological
processes. Cereal Chemistry, 1998.
10. F. Fenoul, M. Le Denmat, F. Hamdi, G. Cuvelier, and C. Michon. Technical note :
Confocal scanning laser microscopy and quantitative image analysis : Application
to cream cheese microstructure investigation. American Dairy Science Association,
2008.
11. W.D. Fisher. On grouping for maximum homogeneity. JASA, 1958.
12. M.M. Galloway. Texture analysis using gray level run lengths. Computer Vision
Graphics Image Process, 1986.
13. X. Gao and J. Tan. Analysis of expanded-food texture by image processing part
i : Geometric properties. Journal of Food Processing Engineering, 1996a.
14. X. Gao and J. Tan. Analysis of expanded-food texture by image processing part
ii : Mechanical properties. Journal of Food Processing Engineering, 1996b.
15. R.C. Gonzalez and R.E. Woods. Digital image processing. Pearson Prentice Hall,
2002.
16. R.M. Haralick. Statistical and structural approaches to texture. Proceedings of the
IEEE, 1979.
17. B. Julesz. Visual Pattern Recognition. IEEE Trans. on Information Theory, 1962.
18. K.I. Laws. Texture image segmentation. PhD thesis, University of Southern Cali-
fornia, USA, 1988.
19. S. Le Feunteun and F. Mariette. Pfg-nmr techniques provide a new tool for conti-
nuous investigation of the evolution of the casein gel microstructure after renneting.
Macromolecules, 41 :2071 2078, 2008.
20. J. Li, J. Tan, F.A. Martz, and H. Heymann. Image texture features as indicators
of beef tenderness. Meat Science, 1999.
21. D. Lingrand. Introduction au traitement dimages. Vuibert, 2004.
22. M. Mellema, P. Walstra, J. H. J. Van Opheusden, and T. Van Vliet. Eects of
structural rearrangements on the rheology of rennet-induced casein particle gels.
Advances in Colloid and Interface Science, 98 :25 50, 2002.
23. O. Monga. An optimal growing algorithm for image segmentation. Internation
Journal of Pattern Recognition and Articial Intelligence, 1987.
24. A. Nakib. Conception de mtaheuristiques de segmentation dimages. Application
des images biomdicales. PhD thesis, Universit Val de Marne - Paris 12, 2008.
25. J. Ohser and F. Mcklich. Statistical Analysis of Microstructures in Materials
Science. John Wiley & Sons, LTD, 2000.
26. M. Petrou and P. Garcia-Sevilla. Image Processing : dealing with texture. John
Wiley & Sons, LTD, 2006.
27. S. Philipp. Analyse de texture applique aux radiographies industrielles. PhD thesis,
Universit Pierre et Marie Curie - Paris 6, 1988.
28. M.G. Reed, C.V. Howard, and G. Staats de Yans. One-stop stereology : the
estimations of 3d parameters using isotropic rulers. journal of Microscopy, 2009.
29. K. Shiranita, T. Miyajima, and R. Takiyama. Determination of meat quality by
texture analysis. Pattern Recognition Letters, 1998.
30. P. Soille. Morphological Image Analysis, Principles and Applications. Springer,
2004.
31. M. Tahiri Alaoui, S.M. Farssi, A. Touzani, K. Mortalla, and P. Bunel. Caract-
risation de texture : application sur les images chographiques du rein. CARI,
2005.
32. Wikipdia. Algorithme de trac de cercle dandres, 2010.
33. X. Zhang and Y. Gao. Face recognition across pose : a review. Pattern Recognition,
2009.
34. C. Zheng, D.W. Sun, and L. Zheng. Recent applications of image texture for
evaluation of food quality - a review. Food Science & Technology, 2006.
Vous aimerez peut-être aussi
- Ec 2 PDFDocument30 pagesEc 2 PDFOssama MakaveliPas encore d'évaluation
- Méthodologie - Dissertation - Commentaire D'arrêtDocument10 pagesMéthodologie - Dissertation - Commentaire D'arrêtRazPas encore d'évaluation
- Echantillon Non ProbabilisteDocument20 pagesEchantillon Non ProbabilisteOmar Aitelcadi100% (1)
- Prospectus Biar Algeria355Document12 pagesProspectus Biar Algeria355Lilia DjaffarPas encore d'évaluation
- NF en ISO 4066 Dessins de Bâtiment Et Génie Civil Cahiers de FerraillagesDocument10 pagesNF en ISO 4066 Dessins de Bâtiment Et Génie Civil Cahiers de Ferraillagesalmabetce100% (1)
- Surveillés Et Consentants: Compréhension Des Écrits 25 PointsDocument3 pagesSurveillés Et Consentants: Compréhension Des Écrits 25 PointsMai NguyenPas encore d'évaluation
- KH BL Rousset Forme Et Signification PDFDocument11 pagesKH BL Rousset Forme Et Signification PDFMohamedDjihadPas encore d'évaluation
- HelloDocument3 pagesHelloعادل الحمديPas encore d'évaluation
- 1 Cours PLDocument34 pages1 Cours PLYahya AalailaPas encore d'évaluation
- Fiche Technique Formation Elaboration Du BudgetDocument4 pagesFiche Technique Formation Elaboration Du BudgetDjamal Mohammedi100% (1)
- Décadence D'athènesDocument2 pagesDécadence D'athènesKyuriPas encore d'évaluation
- Procedure Installation AMCDocument6 pagesProcedure Installation AMCAzerty DelegfrPas encore d'évaluation
- Les Outils de QualitéDocument11 pagesLes Outils de QualitéMouna EssaouiadPas encore d'évaluation
- Gilles Deleuze QuEstce Que Fonder 1956Document124 pagesGilles Deleuze QuEstce Que Fonder 1956ahmed aden100% (2)
- BOISDocument1 pageBOISAmina NEFLAPas encore d'évaluation
- II. Les Racines Carrees Et CubiquesOKDocument7 pagesII. Les Racines Carrees Et CubiquesOKEsther NatountodePas encore d'évaluation
- Plusieurs Objets 2Document25 pagesPlusieurs Objets 2Désiré NgaryadjiPas encore d'évaluation
- RIELMA No6 2013Document196 pagesRIELMA No6 2013Jack MiPas encore d'évaluation
- BudgétisationDocument9 pagesBudgétisationSaad JamaaPas encore d'évaluation
- ÉlectriqueDocument49 pagesÉlectriqueAyoub Fajraoui100% (1)
- Iso 17025 ProgrammeDocument4 pagesIso 17025 ProgrammeAbderrahman HanounePas encore d'évaluation
- L'organisation Relation ClientDocument59 pagesL'organisation Relation ClientChristophe RouxPas encore d'évaluation
- Série Procédures Et Fonctions - CorrDocument13 pagesSérie Procédures Et Fonctions - CorrMohamed SaidiPas encore d'évaluation
- Meca d1 PDFDocument158 pagesMeca d1 PDFAladin ZeribiPas encore d'évaluation
- Fortinet FleXosDocument20 pagesFortinet FleXosWassim El MririePas encore d'évaluation
- Evaluation Diagnostique Typologie TextuelleDocument7 pagesEvaluation Diagnostique Typologie TextuelleTania BelhachemiPas encore d'évaluation
- Offre TechniqueDocument2 pagesOffre TechniqueMardochet TolokaPas encore d'évaluation
- Setting Report 220108 V1.0.en - fr-1Document11 pagesSetting Report 220108 V1.0.en - fr-1Christophe baudouxPas encore d'évaluation
- Fonctions RecusivesDocument16 pagesFonctions RecusivesYtr MlkPas encore d'évaluation
- Analyse 4Document30 pagesAnalyse 4DiGui6150Pas encore d'évaluation