Vous aimerez peut-être aussi
- CommunicationDocument148 pagesCommunicationhacina100% (1)
- Oscillateur HarmoniqueDocument15 pagesOscillateur HarmoniqueSimo ZniberPas encore d'évaluation
- Séquençage d'ADNDocument16 pagesSéquençage d'ADNhacina83% (18)
- Cours Master-Polycopie - Dynamique Des StructuresDocument129 pagesCours Master-Polycopie - Dynamique Des StructuresjijiPas encore d'évaluation
- Meca Serie3Document8 pagesMeca Serie3Adnane XaviestaPas encore d'évaluation
- Choix Du Variateur de VitesseDocument36 pagesChoix Du Variateur de Vitessehacina75% (4)
- Calcul Choix Du MoteurDocument5 pagesCalcul Choix Du MoteurhacinaPas encore d'évaluation
- Etude de MarchéDocument15 pagesEtude de MarchéSara_Sarita_Sa_9986Pas encore d'évaluation
- Chapitre 8 - Puissances en Régime SinusoïdalDocument3 pagesChapitre 8 - Puissances en Régime SinusoïdalBeatrice Florin100% (2)
- Resume Partie B - Electromagnetisme Appliqué - Cours - ET - GénéraleDocument5 pagesResume Partie B - Electromagnetisme Appliqué - Cours - ET - GénéraleArmand EssPas encore d'évaluation
- Série Forces - Équilibre - Poids Et Masse Prof - Elhabib (WWW - Pc1.ma)Document3 pagesSérie Forces - Équilibre - Poids Et Masse Prof - Elhabib (WWW - Pc1.ma)lazar azizPas encore d'évaluation
- 7709478Document5 pages7709478Tarak BenslimanePas encore d'évaluation
- 1870 Dupuit Traite Equilibre Voutes PDFDocument404 pages1870 Dupuit Traite Equilibre Voutes PDFDolly Jese RabemanantsoaPas encore d'évaluation
- Rahmani ResumeDocument16 pagesRahmani ResumeZinai AbdelatifPas encore d'évaluation
- Harmonisé - Corrigé - ELECTRICITE-E. - Prob 2020Document9 pagesHarmonisé - Corrigé - ELECTRICITE-E. - Prob 2020Yanick leufa100% (2)
- 5-MCC Corr PDFDocument8 pages5-MCC Corr PDFAbdenour BenhalimaPas encore d'évaluation
- Série 6Document2 pagesSérie 6قثص67% (3)
- Cours Le Poids Et La Masse Prof - Sohofi (WWW - Pc1.ma)Document2 pagesCours Le Poids Et La Masse Prof - Sohofi (WWW - Pc1.ma)Prince Abdoo100% (1)
- Commande Vect Syn Asy INSA LyonDocument74 pagesCommande Vect Syn Asy INSA LyonBALLOUK Soufiane100% (1)
- Exo Corrige MCC FsDocument20 pagesExo Corrige MCC FsDama DiawaradamaPas encore d'évaluation
- Guide de Révision de PhysiqueDocument30 pagesGuide de Révision de PhysiqueNabila SedjeniPas encore d'évaluation
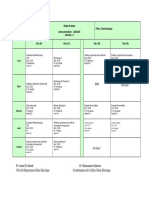
- Ecole Mohammadia D'ingénieurs Emploi Du Temps Année Universitaire: 2020-2021 Semestre: 4 Filière: Génie ElectriqueDocument1 pageEcole Mohammadia D'ingénieurs Emploi Du Temps Année Universitaire: 2020-2021 Semestre: 4 Filière: Génie Electriqueyahya amahritPas encore d'évaluation
- Kirachof Cor1Document4 pagesKirachof Cor1otmanePas encore d'évaluation
- Epreuve PHYSIQUE 1ere C D E & TI 2023 04 03 14 33 36Document2 pagesEpreuve PHYSIQUE 1ere C D E & TI 2023 04 03 14 33 36Bayekanathan Bayeka100% (2)
- Chapitre Circuit Magnétique ELTF2Document16 pagesChapitre Circuit Magnétique ELTF2MohandRahimPas encore d'évaluation
- TD1: Circuits Magnétiques: Exercice 1Document2 pagesTD1: Circuits Magnétiques: Exercice 1Reda LehlaliPas encore d'évaluation
- Loi DohmDocument14 pagesLoi DohmsarahPas encore d'évaluation
- Fga Phy-5062-2 Sa1Document11 pagesFga Phy-5062-2 Sa1yoimiya pewpewPas encore d'évaluation
- Motores SumergiblesDocument56 pagesMotores Sumergiblesmartin.rubenPas encore d'évaluation
- Convertisseur de Tension CC de 12v Jusqu'à 28vDocument5 pagesConvertisseur de Tension CC de 12v Jusqu'à 28vRawand MaemounPas encore d'évaluation
- Chapi1 - Eléctricité Loi de ColombDocument3 pagesChapi1 - Eléctricité Loi de ColombAbdellah Benami0% (1)
- TP05 AnnexeDocument5 pagesTP05 AnnexeSaad TaibiPas encore d'évaluation
- Electrostatique Cours FRDocument37 pagesElectrostatique Cours FRMohamed SbaPas encore d'évaluation
- Serie Revision Les Oscillateurs Electriques MR Mtibaa - PDF Chap 3 Sfax PDFDocument21 pagesSerie Revision Les Oscillateurs Electriques MR Mtibaa - PDF Chap 3 Sfax PDFBoulbaba RebeiPas encore d'évaluation
- Chapitre 2 PhysiqueDocument4 pagesChapitre 2 PhysiqueMoetez FellahPas encore d'évaluation