Vous aimerez peut-être aussi
- Exemple de Calcul Dun Reservoir PDFDocument10 pagesExemple de Calcul Dun Reservoir PDFReda ArifPas encore d'évaluation
- Exemple de Calcul Dun Reservoir PDFDocument10 pagesExemple de Calcul Dun Reservoir PDFReda ArifPas encore d'évaluation
- Chapitre 3 Adherence Béton AcierDocument13 pagesChapitre 3 Adherence Béton AcierDjamel Eddine BOURIPas encore d'évaluation
- Exemples de Clcul Des Silos PDFDocument13 pagesExemples de Clcul Des Silos PDFWalid Dey67% (9)
- Exemples de Clcul Des Silos PDFDocument13 pagesExemples de Clcul Des Silos PDFWalid Dey67% (9)
- Exercices Avec Corrigée en Dynamique Du Point PDFDocument14 pagesExercices Avec Corrigée en Dynamique Du Point PDFLessly100% (4)
- Béton Armé I (3lgc & 3ltp) p1Document72 pagesBéton Armé I (3lgc & 3ltp) p1ZohirMadridPas encore d'évaluation
- TP: G en T: Exercice 1: Guidage en Translation Par Forme CylindriqueDocument1 pageTP: G en T: Exercice 1: Guidage en Translation Par Forme CylindriqueHamrouniPas encore d'évaluation
- Ex Assemblage Non Soudé02020Document3 pagesEx Assemblage Non Soudé02020HamrouniPas encore d'évaluation
- Ex Assemblage Non Soudé02020Document3 pagesEx Assemblage Non Soudé02020HamrouniPas encore d'évaluation
- TP 1Document1 pageTP 1HamrouniPas encore d'évaluation
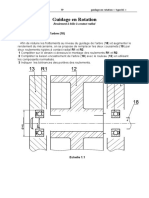
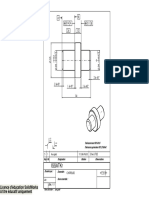
- Guidage en Rotation: Technologie de Construction TP TGMDocument1 pageGuidage en Rotation: Technologie de Construction TP TGMHamrouniPas encore d'évaluation
- TP 3Document1 pageTP 3HamrouniPas encore d'évaluation
- TP 2Document1 pageTP 2HamrouniPas encore d'évaluation
- Guidage en Rotation: Roulement À Bille À Contact RadialDocument1 pageGuidage en Rotation: Roulement À Bille À Contact RadialHamrouniPas encore d'évaluation
- 2exer Dessin PDFDocument8 pages2exer Dessin PDFOthman RaisPas encore d'évaluation
- TP 1Document1 pageTP 1HamrouniPas encore d'évaluation
- TP 4Document1 pageTP 4HamrouniPas encore d'évaluation
- 1exer DessinDocument8 pages1exer DessinSami MahjoubiPas encore d'évaluation
- TP 5Document1 pageTP 5HamrouniPas encore d'évaluation
- Catalogue Tubasol General fr-08-16Document117 pagesCatalogue Tubasol General fr-08-16Ra OufPas encore d'évaluation
- Presentation Suiveur SolaireDocument21 pagesPresentation Suiveur SolaireHamrouni100% (3)
- Catalogue Tubasol General fr-08-16Document117 pagesCatalogue Tubasol General fr-08-16Ra OufPas encore d'évaluation
- Théorie Des Structures-Chapitre5Document9 pagesThéorie Des Structures-Chapitre5HamrouniPas encore d'évaluation
- 1 - Tutorial Corps de VanneDocument12 pages1 - Tutorial Corps de VannemarwanPas encore d'évaluation
- Produit BrideDocument14 pagesProduit BrideEl Fab RastakaraiPas encore d'évaluation
- Produit BrideDocument14 pagesProduit BrideEl Fab RastakaraiPas encore d'évaluation
- TP2 Boite VitesseDocument4 pagesTP2 Boite VitesseHamrouniPas encore d'évaluation
- FORMATION NEIGE ET VENT Robot PDFDocument23 pagesFORMATION NEIGE ET VENT Robot PDFAlimatine BogniniPas encore d'évaluation
- Théorie Des Structures-Chapitre4Document12 pagesThéorie Des Structures-Chapitre4HamrouniPas encore d'évaluation
- Théorie Des Structures-Chapitre3Document21 pagesThéorie Des Structures-Chapitre3HamrouniPas encore d'évaluation
- Cintreuse PDFDocument14 pagesCintreuse PDFHamrouniPas encore d'évaluation
- Théorie Des Structures-Chapitre6Document10 pagesThéorie Des Structures-Chapitre6HamrouniPas encore d'évaluation
- I.1 - Modélisation de Lignes Électriques 2021Document37 pagesI.1 - Modélisation de Lignes Électriques 2021jardindelaermitaPas encore d'évaluation
- Corrigé TD MPC Ex 3 4 5 7 8Document10 pagesCorrigé TD MPC Ex 3 4 5 7 8Mohammed El azhari100% (1)
- 23 Electromagnetisme Electrostatique ExercicesDocument1 page23 Electromagnetisme Electrostatique Exercicessoufian ensetPas encore d'évaluation
- Université Du QuébecDocument132 pagesUniversité Du QuébecÃh ŁemPas encore d'évaluation
- L3 Turbomachine1 Chap2Document13 pagesL3 Turbomachine1 Chap2Hocine IKkACHEPas encore d'évaluation
- TPMEF M1 Maint COMSOL TP2-Cond2DStat PDFDocument2 pagesTPMEF M1 Maint COMSOL TP2-Cond2DStat PDFBrahim AmiatafaPas encore d'évaluation
- TP Pompe À ChaleurDocument7 pagesTP Pompe À ChaleuralemPas encore d'évaluation
- Tp5 Etude MouvementDocument4 pagesTp5 Etude MouvementMoustieePas encore d'évaluation
- Cours Tranchant PDFDocument35 pagesCours Tranchant PDFaminePas encore d'évaluation
- TD 3 Ma 2018 VF1Document6 pagesTD 3 Ma 2018 VF1Mohamed BelbarakaPas encore d'évaluation
- Thermodynamique 1Document16 pagesThermodynamique 1Soumaila SdgPas encore d'évaluation
- Souleiman SbaiDocument48 pagesSouleiman Sbaiinwii383Pas encore d'évaluation
- Initiation Aux Calculs de Structures Poutre Par Éléments FinisDocument6 pagesInitiation Aux Calculs de Structures Poutre Par Éléments FinisMtthÿ LbrPas encore d'évaluation
- NeopreneDocument6 pagesNeoprenesafa benelkadiPas encore d'évaluation
- Pfe-Tiba RamiDocument52 pagesPfe-Tiba RamiRami WarghiPas encore d'évaluation
- M2102 TD CorrigésDocument103 pagesM2102 TD CorrigésAnonymous CyBP3KmQyL100% (1)
- Projet Sur Mecanique D'entaire-8Document35 pagesProjet Sur Mecanique D'entaire-8Iman AllouchPas encore d'évaluation
- Caract Mouvmt EXO Ennonc SDocument2 pagesCaract Mouvmt EXO Ennonc SzakiPas encore d'évaluation
- CH 3 Liaisons Mécaniques 2022 PDFDocument4 pagesCH 3 Liaisons Mécaniques 2022 PDFAymen NekkaaPas encore d'évaluation
- Dias-Module-02-Pompes-Et-Moteurs - CopieDocument47 pagesDias-Module-02-Pompes-Et-Moteurs - Copiebadibangaisrael01Pas encore d'évaluation
- Deversement CharpentesDocument6 pagesDeversement Charpentesaladia610Pas encore d'évaluation
- TP FlambementDocument9 pagesTP FlambementManar BePas encore d'évaluation
- CHEM - TD 4.2 - Pont Mixte Hyperstatique - CorrigéDocument12 pagesCHEM - TD 4.2 - Pont Mixte Hyperstatique - CorrigéMario100% (1)
- 02 Traction Compression WWW - Tunisie EtudesDocument10 pages02 Traction Compression WWW - Tunisie EtudesntayoubPas encore d'évaluation
- Le FluageDocument1 pageLe FluageMārşhmełłø MēŕPas encore d'évaluation
- TD Ex1Document2 pagesTD Ex1hdjs5Pas encore d'évaluation
- Compte Rendu FinalDocument11 pagesCompte Rendu Finalافضل التلعاب الاندرويد والايفونPas encore d'évaluation