Académique Documents
Professionnel Documents
Culture Documents
Dias-Module-02-Pompes-Et-Moteurs - Copie
Transféré par
badibangaisrael01Titre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Dias-Module-02-Pompes-Et-Moteurs - Copie
Transféré par
badibangaisrael01Droits d'auteur :
Formats disponibles
Module-02
Pompes et moteurs hydrauliques
volumétriques
Pompe volumétrique
Une pompe est une machine réceptrice qui sert à transvaser un liquide dont la charge
à sa section d’entrée e est
𝑝𝑒 𝑐𝑒2
𝐸𝑒 = 𝑔𝑧𝑒 + +
𝜌 2
, vers sa section de sortie s où la charge devient
𝑝𝑠 𝑐𝑠2
𝐸𝑠 = 𝑔𝑧𝑠 + + > 𝐸𝑒 .
𝜌 2
L’énergie massique utile recueillie suite à cette opération, 𝐸𝑢 = 𝐸𝑠 − 𝐸𝑒 et l’énergie
consommées en pertes inhérentes à cette transformation𝑒𝑓 sont fournies par le moteur
d’entraînement. L’énergie mécanique nécessaire à toute cette opération de
compression du liquide vaut donc la somme :
𝐸𝑚 = 𝐸𝑢 + 𝐸𝑓
En pratique, dans une machine on sépare l’énergie dissipée par les pertes en deux
grandes familles, la première constitue les pertes mécaniques (on dit aussi pertes
organiques externes (au système)) 𝐸𝑓𝑚 (frottements
des pièces en mouvement relatif, entraînement des auxiliaires), la seconde dans le
fluide (le système délimité par un volume de contrôle), se compose des pertes par
frottements internes 𝐸𝑓𝑖 (frottements fluides, rétrécissement, chocs, …),
𝐸𝑓 = 𝐸𝑓𝑚 + 𝐸𝑓𝑖 .
Lorsqu’on considère les frottements internes du fluide, il y a lieu de les scinder en deux
composantes,
𝐸𝑓𝑖 = 𝐸𝑓𝑖𝑡 + 𝐸𝑓𝑖𝑣 .
Où :
- 𝐸𝑓𝑖𝑡 : pertes dans les tubulures d’aspiration et de refoulement,
- 𝐸𝑓𝑖𝑣 : pertes dans l’espace à volume variable.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 1 | 47
La relation détaillée du flux d’énergie du moteur d’entraînement vers le fluide moteur
devient :
𝐸𝑚 = 𝐸𝑢 + 𝐸𝑓𝑖𝑡 + 𝐸𝑓𝑖𝑣 + 𝐸𝑓𝑚 . (1.3)
On définit successivement:
𝐸𝑖𝑡ℎ = 𝐸𝑚 − 𝐸𝑓𝑚 (1.4a)
𝐸𝑖 = 𝐸𝑖𝑡ℎ − 𝐸𝑓𝑖𝑣 (1.4b)
𝐸𝑢 = 𝐸𝑖 − 𝐸𝑓𝑖𝑡 (1.4c)
Dans la suite nous confondrons souvent 𝐸𝑢 et
𝐸𝑖 , en négligeant les pertes de charge dans les
tubulures d’aspiration et de refoulement.
Les échanges d’énergie entre l’organe mécanique (par exemple le piston pour une
pompe alternative à piston) et le liquide se déroulent dans l’espace de volume
variable. Ce volume variable s’ouvre de façon cyclique vers les tubulures d’aspiration
et de refoulement.
Principaux types de pompes
Pour déplacer ce liquide, il faut lui communiquer de l'énergie. De ce fait, la pompe
est entrainée par un moteur qui lui fournit l’énergie nécessaire qu’elle va
communiquer au liquide. Le moteur qui alimente la pompe transforme l'énergie
électrique (thermique ou autre) en énergie mécanique pour permettre le mouvement
des organes de la pompe. L’énergie mécanique est transformée dans la pompe en
énergie potentielle et cinétique communiquées au fluide.
Suivant le principe adopté pour donner de l’énergie au liquide, on peut distinguer
trois types principaux de pompe:
- les vis d’Archimède, le seau d’eau qu’on remonte d’un puits,… font partie du premier
lot, elles élèvent principalement l’énergie de position du liquide, c’est le terme 𝑔𝑧
qui est mis en œuvre;
- les pompes volumétriques qui comprennent les pompes alternatives à pistons, les
pompes à palettes, les pompes à engrenages, ..., le liquide acquière de l’énergie de
façon importante par la pression, c’est le terme 𝑝⁄𝜌 qui est à l’avant plan ;
et enfin ;
- les pompes axiales, centrifuges, hélico-centrifuges,…utilisent essentiellement la
variation du moment cinétique pour donner de l’énergie au fluide, dans ces dernières
c’est la variation du terme de la vitesse qui est prépondérante
𝑐 2 ⁄2
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 2 | 47
, elles constituent la famille des pompes
(roto)dynamiques (turbomachines). Ces dernières ne font pas l’objet de ce module.
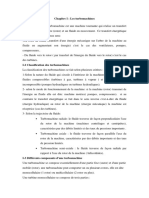
Fig. 1.1. Principaux types de pompes volumétriques
A partir de ces considérations, nous pouvons simplifier notre classification en parlant
d’une part des pompes hydrostatiques (les deux premières catégories) et des pompes
dynamiques (la dernière catégorie).
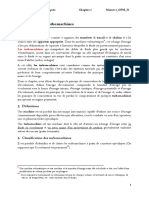
les pompes hydrostatiques et principalement celles du deuxième type sont
appelées pompes volumétriques : l’écoulement résulte de la variation d’une
capacité (variation d’un volume) occupée par le liquide.
Fig. 1.2. Pompe volumétrique - Pompe à palettes
les pompes dynamiques font partie de la famille des turbomachines: le
mouvement du liquide résulte de l’accroissement d’énergie qui lui est
communiqué par la variation du moment cinétique du fluide traversant la roue.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 3 | 47
Notre propos dans ce module porte uniquement sur les pompes volumétriques,il en
existe plusieurs sortes.Il est très difficile de pouvoir les passer toutes en revue, tâche
pratiquement impossible dans le temps d’un cours. Néanmoins, nous pouvons retenir
que fondamentalement elles fonctionnent théoriquement de la même manière, c’est
principalement les cinématiques particulières des machines qui les distinguent.
Dans ce qui suit nous nous étendrons d’abord et essentiellement sur les pompes
alternatives à piston avec le système bielle-manivelle nécessaire pour faire varier le
volume de l’enceinte où a lieu la transformation de l’énergie entre la machine et le
liquide. Viendra ensuite dans les dernières sections du moduleun parcours des divers
autres types de pompes en mettant l’accent sur l’un ou l’autre aspect technologique.
Pompe alternative à piston. Fonctionnement
Introduction
Une pompe alternative à piston est une machine réceptrice qui élève la pression du
liquide qui la traverse, elle transforme l’énergie mécanique reçue𝐸𝑚 en énergie du
fluide𝐸𝑎 . Un débit volumétrique𝑞𝑣 traverse sa section d’entrée e à une pression𝑝𝑒 ,
son énergie à travers sa section de sortie s est plus grande qu’à sa section d’entrée.
Elle a pour fonction de déplacer de façon « continue » un liquide à partir de sa section
amont𝑒où l’énergie est
𝐸𝑒 = 𝑔𝑧𝑒 + 𝑝𝑒 ⁄𝜌 + (𝑐𝑒2 ) ⁄ 2
, et de le reverser dans un réservoir avaloù l’énergie est plus élevée. L’énergie
massique à la sortie de la pompe vaut
𝑝𝑠 𝑐𝑠2
𝑔𝑧𝑠 + 𝜌
+ 2
= 𝐸𝑠 > 𝐸𝑒 .
L’essentiel de l’énergie fournie au liquide par la pompe provient d’un moteur
d’entraînement qui anime les éléments mécaniques responsables de la variation de
volume. Ce moteur d’entrainement est soit électrique, soit thermique ou autre.
Le fluide de travail étant un liquide, donc en première approximation réputé
incompressible et compte tenu aussi de sa chaleur massique élevée, dans les
applications courantes, la variation de la température entre l’entrée e et la sortie s
de la machine est négligeable, la transformation que subit le liquide est donc
considérée comme isotherme.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 4 | 47
Fig. 1.3. Eléments principaux d’une pompe alternative à piston
Ce n’est pas toujours le cas, dans les systèmes hydrauliques où l’on utilise des huiles
minérales, avec des variations de pressions de quelques centaines de bars, on est
conduit à prendre en compte les effets de la compressibilité et de la dilatation du
liquide ainsi que celles des parois qui le contient.
Considérons une machine simple avec un cylindre et un piston simple effet, nous
dirons une pompe monocylindrique simple effet. Dans une telle machine, un organe
mécanique, en l’occurrence le piston dans une chambre de volume variable permet
l’échange d’énergie du moteur d’entraînement vers le fluide. Le volume passe
alternativement d’une valeur maximum 𝑉𝑚𝑎𝑥 à une
valeur minimum𝑉𝑚𝑖𝑛 . C’est la variation de volume de la chambre qui assure la
transformation de l’énergie mécanique en énergie du liquide dans la machine, on
parle donc de pompe volumétrique ou pompe à capacité variable ou à volume
engendrée.
La différence entre le volume maximum et le volume minimum s’appelle la cylindrée
ou le volume engendrée
𝑉𝑐𝑦𝑙 = 𝑉𝑚𝑎𝑥 − 𝑉𝑚𝑖𝑛 . (1.5)
L’écoulement du fluide dans la machine n’est pas stationnaire, le débit
volumétrique𝑞𝑣 , et la pression 𝑝𝑒 à l’entrée et 𝑝𝑠 à la sortie ne sont pas constants, ils
fluctuent au cours du temps. Ces fluctuations sont d’ordinaire très gênantes pour la
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 5 | 47
machine, pour le circuit hydraulique et pour l’homme à cause des bruits et des
vibrations.
Il existe une infinité de mécanismes utilisés pour produire la variation de volume
d’une chambre. Le mécanisme le mieux connus et le plus exploité est le système
bielle-manivelle. Dans les sections qui vont suivre, il ne sera pas fait mention d’un
autre mécanisme que du système bielle manivelle. La cinématique de tout autre
mécanisme peut très facilement être analysée et les résultats de l’étude présente
peuvent être transposés sans grandes difficultés aux autres types de pompes.
Fonctionnement théorique
Considérons le schéma de la figure 1.4qui représente une pompe monocylindre à
piston simple effet.
Fig. 1.4.Fonctionnement d’une pompe alternative à piston.
Diagramme indiqué (ou de Watt)
- C : course ;
- D : alésage ou diamètre intérieur du cylindre ;
- PMI: point mort intérieur;
- PME: point mort extérieur ;
- 12: aspiration;
- 23: «compression»;
- 34: refoulement;
- 41: «détente».
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 6 | 47
Nous faisons les hypothèses suivantes :
- l’arbre tourne à la vitesse angulaire 𝜔 constante, 𝛼 = 𝜔𝑡 est le déplacement
angulaire,
- le rapport𝐵⁄𝑅, (longueur bielle/ longueur manivelle) est très grand,
- la pompe est monocylindrique, piston simple effet d’aire de surface active
S, le cycle est à deux temps, 1 aller et 1 retour avec une période𝑇 = 2𝜋⁄𝜔,
- le liquide suit le piston dans son mouvement sans présenter de vide.
Dans ces conditions le mouvement est harmonique et le déplacement du piston vaut :
𝑥𝑃∗ = 𝑅[1 − cos(𝜔𝑡)], (1.6)
sa vitesse :
𝑣𝑃∗ = 𝑅𝜔. sin(𝜔𝑡), (1.7)
et enfin son accélération :
𝑎𝑃∗ = 𝑅𝜔2 cos(𝜔𝑡). (1.8)
Dans ce fonctionnement nous considérons un volume mort non nul
𝑉𝑚 . Supposons le piston en mouvement du point mort
extérieur PME vers le point mort intérieur PMI (de la gauche vers la droite de la figure
1.4.), la valve d’aspiration 𝑉𝑎 s’ouvre et reste ouverte pendant le déplacement du
piston, la valve de refoulement 𝑉𝑟 reste fermée. Pendant tout ce temps, le liquide
entre dans le corps de la pompe et suit le mouvement du piston. Théoriquement,
l’aspiration se fait à la pression constante 𝑝𝑎 = 𝑝𝑒
d’aspiration, dans un diagramme de Watt (𝑝, 𝑉) la courbe représentant la
transformation est une droite horizontale. Cette course est celled’aspiration.
Lorsque le piston atteint le PMI, (l’extrême gauche), la vitesse du piston s’annule et
change de signe, un déplacement infinitésimal vers la gauche va provoquer
l’élévation instantanée de la pression dans la chambre parce que la valve d’aspiration
se ferme automatiquement, la valve de refoulement reste aussi fermée tant que la
pression est en dessous de sa pression de tarage. Cette élévation de pression se
manifestant de manière instantanée et se traduit dans le diagramme (𝑝, 𝑉) par une
droite verticale parallèle à l’axe des𝑝. A la fin de la course d’aspiration a lieu
l’élévation instantanée de la pression, le volume étant fixe. Une fois que la pression
de refoulement 𝑝𝑟 = 𝑝𝑠 atteinte, toujours pour 𝑉 =
𝑉𝑚𝑎𝑥 ( 𝑝𝑟 la pression
théorique réglée à la valeur de la pression de tarage du ressort ou du mécanisme
commandant la valve de refoulement), la valve de refoulement
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 7 | 47
𝑉𝑟 s’ouvre et la pompe commence alors à débiter
dans la conduite de refoulement, la valve d’aspiration
𝑉𝑎 est fermée.
Pendant toute la course qui va du PMI vers le PME (course de la droite vers la gauche)
la valve de refoulement 𝑉𝑟 reste ouverte tandis que celle d’aspiration 𝑉𝑎 reste fermée.
La courbe représentative est une droite horizontale dans le diagramme (𝑝, 𝑉), la
course correspondante est nommée le refoulement.
Tableau 1.1. Fonctionnement théorique d’une pompe monocylindrique à piston simple effet
Enfin, arrivée au PME, la vitesse du piston s’annule de nouveau pour changer de
signe. Un déplacement infinitésimal ultérieur va créer cette foi-ci une dépression qui
conduit à une chute de pression 𝑝 < 𝑝𝑟 occasionnant d’une part à la fermeture
instantanée de la valve de refoulement et d’autre part à l’ouverture instantanée de
la valve d’aspiration lorsque 𝑝 = 𝑝𝑎 . La baisse de la pression a été instantanée et la
courbe se traduit par une droite verticale, le volume résiduel gardant la valeur du
volume mort 𝑉𝑚 . A la fin du refoulement se remarqueune chute brutale de la pression,
de 𝑝𝑟 à 𝑝𝑎 le volume restant à la valeur constante
𝑉𝑚 , le cycle du fonctionnement de la pompe est ainsi
bouclé.
Cette action sur le fluide, aspiration isobare 𝑝 = 𝑝𝑎 pendant la première demi-période
𝑇⁄2 et refoulement 𝑝 = 𝑝𝑟 suivant la deuxième demi-période, discontinue dans le
temps, constitue une caractéristique fondamentale des machines volumétriques.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 8 | 47
L’isolement du volume max à la pression 𝑝 = 𝑝𝑎 , avec VAF & VRF est suivi d’une mise
en pression faisant passer la pression instantanément de la valeur 𝑝𝑎 à la valeur 𝑝𝑟 .
Les masses fluides en phases d’isolement ([2-3] et [4-1]) constituent
thermodynamique des systèmes fermés.
Grandeurs moyennes relatives au cycle théorique
Débit instantané théorique
■ Aspiration :
Pour une pompe dont l’arbre tourne à la fréquence de , la période
, où 𝜔 est la vitesse angulaire de rotation.
Le débit instantané théorique aspiré par la pompe se présente comme suit :
𝑇
- pendant la première demi-période,0 < 𝑡 ≤ 2 𝑜𝑢[0 ≤ 𝛼 ≤ 𝜋], [1->2], VAO et
VRF
𝜋𝐷 2
∗
𝑞𝑣𝑡ℎ = 𝑣𝑃∗ . 𝑆 = 4
𝑅𝜔. sin(𝜔𝑡) , où 𝑣𝑃∗ est la
vitesse instantanée du piston. (1.9a)
- Compression [2 -> 3], VAF et VRF, les débits à l’aspiration et au
refoulement sont nuls.
𝑇
- nul pendant la demi-période suivante, 2 < 𝑡 ≤ 𝑇,[3 -> 4], VAF et VRO, il n’y
a pas d’aspiration,
𝑞𝑣𝑡ℎ = 0.
(1.9b)
Figure 1.5a. Figure 1.5b.
■ Refoulement :
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 9 | 47
Le débit instantané refoulé par la pompe est
𝑇
- nul pour0 < 𝑡 ≤ , [1->2], VAO et VRF
2
𝑞𝑣𝑡ℎ = 0.
(1.10a)
𝑇
- 2
< 𝑡 ≤ 𝑇, [3 -> 4], VAF et VRO, le débit au refoulement vaut,
𝜋𝐷 2
∗
𝑞𝑣𝑡ℎ = 𝑣𝑃∗ . 𝑆, = 4
𝑅𝜔. |sin(𝜔𝑡)| (1.10b)
- détente [4 -> 1], VAF et VRF, les débits à l’aspiration et au refoulement
sont nuls.
Débit théorique moyen
Le débit théorique moyen qui traverserait de façon continu la pompe vaut :,
1 𝑇⁄2 1 𝑇
𝑞𝑣𝑡ℎ = . ∫0 𝑣𝑃∗ . 𝑆𝑑𝑡|𝑎𝑠𝑝 = . ∫𝑇⁄2 |𝑣𝑃∗ | . 𝑆𝑑𝑡|𝑟𝑒𝑓 = 𝑛𝑉𝑐𝑦𝑙
𝑇 𝑇
(1.11)
Figure 1.6.
, parce que la fréquence de rotation est 𝑛 = 1⁄𝑇 pour une machine à deux temps.
On peut aussi considérer la vitesse angulaire moyenne,
2𝜋
𝜔= 𝑇
(1.12)
, au lieu de 𝑛 = 1⁄𝑇 et définir,
𝑉𝑐𝑦𝑙
𝐷𝑃 = 2𝜋
(1.13)
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 10 | 47
, la cylindrée par radiant. On aura donc,
𝜔
𝑞𝑣𝑡ℎ = 2𝜋 𝑉𝑐𝑦𝑙 = 𝜔𝐷𝑃 . (1.14)
Puissance théorique
Avec :
- ∗
𝑝𝑖𝑡ℎ , la pression instantanée théorique dans le volume variable;
- 𝑑𝑥𝑃∗ , la variation élémentaire du déplacement de la face active du
piston ;
- 𝑣𝑃∗ , la vitesse instantanée de la face active du piston ;
- ∗
𝐶𝑖𝑡ℎ , le couple instantané sur l’arbre ;
- 𝑑𝛼 , le déplacement élémentaire du vilebrequin, on trouve directement:
- le travail indiqué (ou interne théorique) instantané recueilli par le piston :
o le travail indiqué (interne) théorique élémentaire :
∗
𝑑𝑊𝑖𝑡ℎ ∗
= 𝑆𝑝𝑖𝑡ℎ ∗
𝑑𝑥𝑃∗ = 𝐶𝑖𝑡ℎ 𝑑𝛼 (1.15)
, résultats relatifs aux mouvements alternatifs de translation du
pistondans le cylindreet de rotation de l’arbre;
o la puissance indiquée (interne) théorique instantanée :
𝑑𝑊𝑖𝑡ℎ
∗
𝑃𝑖𝑡ℎ = 𝑑𝑡
∗
= 𝑆𝑝𝑖𝑡ℎ ∗
𝑣𝑃∗ = 𝜔𝐶𝑖𝑡ℎ (1.16)
La puissance indiquée instantanée théorique à l’arbre est liée à celle théorique
recueillie par le piston par une relation d’égalité, il n’y a pas de pertes ! Aussi
écrivons-nous les relations ci-dessous :
- le couple indiqué instantané :
∗ ∗ 𝑣𝑃
𝐶𝑖𝑡ℎ = 𝑆𝑝𝑖𝑡ℎ
𝜔
∗ ∗
𝐶𝑖𝑡ℎ = 𝑆𝑅. 𝑝𝑖𝑡ℎ sin(𝜔𝑡);
- le travail indiqué théorique (travail par cycle):
𝑊𝑖𝑡ℎ = 𝑉𝑐𝑦𝑙 . (𝑝𝑟 − 𝑝𝑎 ) = 𝑎𝑖𝑟𝑒(12341) (1.17)
, il correspond à l’aire du diagramme d’indicateur théorique;
- la puissance théorique moyenne indiquée :
𝑊𝑖𝑡ℎ
𝑃𝑖𝑡ℎ = , (1.18)
𝑇
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 11 | 47
𝑃𝑖𝑡ℎ = 𝑞𝑣𝑡ℎ (𝑝𝑟 − 𝑝𝑎 ) = 𝑞𝑣𝑡ℎ 𝜌𝑔𝐻𝑡ℎ = 𝑞𝑚𝑡ℎ . 𝐸𝑎𝑡ℎ . (1.19)
𝐻𝑡ℎ : est la hauteur engendrée théorique.
- le couple indiqué théorique moyen,
𝑃𝑖𝑡ℎ
𝐶𝑖𝑡ℎ = ,
𝜔
𝑇
𝐶𝑖𝑡ℎ = 𝑃𝑖𝑡ℎ . ,
2𝜋
𝑇
𝐶𝑖𝑡ℎ = . 𝑞 (𝑝 − 𝑝𝑎 ),
2𝜋 𝑣𝑡ℎ 𝑟
𝐶𝑖𝑡ℎ = 𝐷𝑃 (𝑝𝑟 − 𝑝𝑎 ). (1.20)
, où 𝐷𝑃 : est la cylindrée par radian.
La hauteur théorique développée par la pompe est définie comme,
𝑃𝑖𝑡ℎ
𝐻𝑡ℎ = . (1.21)
𝑔𝜌𝑞𝑣𝑡ℎ
La machine étant supposée parfaite, les frottements mécaniques moyens sont
nuls, ce qui conduit à:
- couple effectif moyen théorique :
𝐶𝑒𝑓𝑓 = 𝐷𝑃 (𝑝𝑟 − 𝑝𝑎 ). (1.22)
- puissance utile théorique:
𝑃𝑢 = 𝑃𝑚 = 𝑔𝜌𝑞𝑣𝑡ℎ 𝐻𝑡ℎ (1.23)
- hauteur engendrée (manométrique, énergétique) totale théorique :
𝑝𝑟 −𝑝𝑎
𝐻𝑡ℎ = 𝑔𝜌
, (1.24)
si les sections des tuyauteries d’aspiration et de refoulement sont égales et que
les cotes𝑧𝑒 = 𝑧𝑠 . La puissance utile égale :
𝑃𝑢 = 𝑞𝑣.𝑡ℎ (𝑝𝑟 − 𝑝𝑎 ). (1.25)
Fonctionnement réel
Ecarts par rapport au fonctionnement théorique
Les principales différences entre le fonctionnement théorique et le fonctionnement
réel de la pompe alternative à piston se retrouvent :
- au niveau des fluctuations des pressions en début et en fin de courses de
refoulement et d’aspiration. Ces fluctuations sont causées par les effets
d’inertie des valves d’aspiration 𝑉𝑎 et de refoulement 𝑉𝑟 . A cela s’ajoute
l’influence du volume mort, volume nuisible ou espace résiduel
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 12 | 47
Vm l’influence
des pertes de charge occasionnées par le passage du liquide au travers des
tuyauteries et des valves 𝑉𝑎 et 𝑉𝑟 qui modifie la position des courbes
d’aspiration et de refoulement.
- le liquide a été considéré comme incompressible et les parois de la pompe
ont bénéficiées de l’hypothèse d’indéformabilité dans la modélisation du
fonctionnement théorique, toutes ces hypothèses ne sont valables qu’en
première approximation.
Pour ces différentes raisons, la courbe du fonctionnement réel est donc bien différente
de celle théorique. Elle est illustrée sur la même figure1.4, et s’appelle courbe du
diagramme indiquée réel.
Influence du volume mort
Le volume restant entre la culasse et le piston lorsque celui-ci est à son PME est défini
comme l’espace mort ou l’espace résiduel. Il est impossible de concevoir une machine
avec un volume mort nul, à cause des jeux dans les logements nécessaires aux
clapets (ou valves, ou soupapes), jeux des articulations de la machine.
La phase 4-1 est une détente du fluide contenu dans l’espace mort. Ce fluide est
"incompressible", donc c’est une détente sans variation de volume. Le
fonctionnement d’une pompe est donc possible avec un très grand espace mort, celui-
ci ayant néanmoins une influence nuisible sur l’auto-amorçage comme on le verra
plus loin.
Influence des pertes de charge
Les clapets provoquent des pertes de charge 𝛥𝑝 > 0 fonctions croissantes du débit
instantané, donc de la pression instantanée. Les pressions:
𝑝𝑎∗ = 𝑝𝑎 − 𝛥𝑝|𝑎 , à l’aspiration, la pression instantanée à l’aspiration est inférieures à la
pression théorique d’aspiration𝑝𝑎 et
𝑝𝑟∗ = 𝑝𝑟 + 𝛥𝑝|𝑟 , au refoulement, en ayant à l’esprit que 𝛥𝑝𝑎 > 0 et 𝛥𝑝𝑟 > 0 sont variables
pendant le cycle. La hauteur réelle 𝐻 développée par la pompe sera inférieure à celle
théorique 𝐻𝑡ℎ .
Phases de compression et de détente
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 13 | 47
Théoriquement ces phases sont représentées par des segments de droites verticales
sur le diagramme d’indicateur théorique. Les modifications à apporter proviennent
de:
- manque d’étanchéité (fermeture imparfaite des valves);
- liquide réel compressible;
- ouverture et fermeture retardées des clapets, (inertie);
- élasticité non négligeable des joints;
- présence d’air dans le corps de la pompe ;
- …
Comme conséquence:
- une diminution du volume pendant la compression due aux fuites et,
compression de l’air présent éventuellement dans le liquide et dans les
joints;
- une augmentation du volume pendant la détente due aux fuites, retour du
refoulement vers l’aspiration et à la détente de l’air des joints et
éventuellement du fluide.
L’air présent à l’intérieur du corps de la pompe peut donner lieu à des oscillations de
pression, mais produit un certain amortissement des chocs intenses sur le piston et
les clapets.
Caractéristiques moyennes réelles
Considérons une pompe monocylindrique à simple effet. Les diagrammes d’indicateur
théorique et réel sont représentés sur la figure 1.4.
Pression moyenne indiquée (𝑝𝑖𝑚𝑜𝑦 )
En relevant à l’aide d’un capteur la pression instantanée du liquide dans le cylindre
en fonction du volume instantané V, c'est-à-dire en obtenant l’aire de la surface du
diagramme d’indicateur réel, on obtient en divisant cette aire par la cylindrée,
𝑊𝑖
𝑝𝑖𝑚𝑜𝑦 = 𝑉 (1.26)
𝑐𝑦𝑙
, qui représente la pression indiqué moyenne.
𝑊𝑖 , est le travail utile (ou indiqué, ou interne) moyen réel par cycle. Le moteur
d’entrainement communique à l’arbre de la pompe un travail moteur moyen par
cyclequi vaut 𝑊𝑚 .
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 14 | 47
Débit moyen réel (𝑞𝑣 )
Le débit moyen réel 𝑞𝑣 est inférieur au débit moyen théorique𝑞𝑣𝑡ℎ car l’étanchéité de
la machine n’est pas absolue. L’étanchéité pendant les fermetures des valves
d’aspiration et de refoulement n’est pas parfaite. Comme la pression 𝑝𝑟 est supérieure
à la pression 𝑝𝑎 , il existe un très faible débit, le débit
de fuite moyen, noté 𝑞𝑣𝑓 qui rentre du refoulement vers l’aspiration de la pompe.
Le débit moyen réel 𝑞𝑣 qui traverse la pompe est
donc bien inférieur au débit moyen théorique 𝑞𝑣𝑡ℎ = 𝑞𝑣 + 𝑞𝑣𝑓 d’où on définit :
le rendement volumétrique :
𝑞𝑣 𝑞
𝜂𝑣𝑜𝑙 = 𝑞 = 1 − 𝑞 𝑣𝑓 (1.27)
𝑣.𝑡ℎ 𝑣𝑡ℎ
Fig. 1.7. Débit de fuite d’une pompe
Le rendement volumétrique se détermine par des essais.
Puissance mécanique (𝑃𝑚 )
La puissance à l’arbre de la pompe 𝑃𝑚 est supérieure
à la puissance interne théorique (ou indiquée théorique)
𝑃𝑖𝑡ℎ à cause des frottements mécaniques inévitables
au niveau des paliers, des frottements dus au mouvement relatif piston-alésage du
cylindre, …On définit ainsi un rendement mécanique
𝑃𝑖𝑡ℎ 𝑊𝑖𝑡ℎ
𝜂𝑚 = 𝑃𝑚
= 𝑊𝑚
(1.28)
, il est de l’ordre de0.90 … 0.95..
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 15 | 47
Puissance interne théorique 𝑃𝑖𝑡ℎ (ou indiquée théorique)
La puissance interne théorique (moyenne) est celle qu’aurait fournie le moteur
d’entraînement au liquide s’il n’y avait pas de frottements de quelque nature que ce
soit, ni de débit de fuite entre les zones hautes pression et celle de basse pression.
L’énergie reçue théoriquement par le liquide pendant un cycle, (courses aller - retour
du piston)est représentée par l’aire 𝑊𝑖𝑡ℎ du contour
rectangulaire du diagramme indiqué théorique.
Au débit théorique moyen 𝑞𝑣𝑡ℎ qu’entraine le piston est
associée une hauteur théorique 𝐻𝑡ℎ qui n’est grevée d’aucune perte hydraulique. La
puissance théorique indiquée moyenne est
𝑃𝑖𝑡ℎ = 𝑛. 𝑊𝑖𝑡ℎ = 𝑔𝜌𝑞𝑣𝑡ℎ 𝐻𝑡ℎ . (1.29)
𝜋𝐷 2
𝑊𝑖𝑡ℎ = (𝑝𝑟 − 𝑝𝑎 ).2𝑅.
4
, (1.30)
En réalité la puissance interne réelle 𝑃𝑖 < 𝑃𝑖𝑡ℎ . La différence est constituée d’une part,
des pertes par frottements internes des différents filets fluides dans la pompe et sur
ces tubulures d’aspiration et de refoulement, et d’autre part par la puissance perdue
par le débit de fuite qui passe des valves de refoulement vers les valves d’aspiration.
Le débit réel traversant la pompe vaut 𝑞𝑣 = 𝑞𝑣𝑡ℎ − 𝑞𝑣𝑓 ,
où 𝑞𝑣𝑓 est le débit de fuite (moyen).
Puissance utile (ou puissance interne, ou puissance indiquée)Pu
La puissance utile (identifiée à la puissance interne réelle) est celle qu’aurait fournie
le moteur d’entraînement au liquide s’il n’y avait pas de frottements de quelque
nature que ce soit.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 16 | 47
Fig. 1.8. Fonctionnement réel d’une pompe alternative à piston.
Diagramme indiqué réel (ou de Watt)
Elle a pour valeur :
𝑃𝑖 = 𝑛. 𝑊𝑖 = 𝜌𝑞𝑣 𝑔𝐻, 𝑜ù (1.31)
𝑃𝑢 = 𝜌𝑞𝑣 (𝑔𝐻) = 𝜌𝑞𝑣 𝐸𝑢 = 𝑃𝑖 . (1.32)
Dans cette expression 𝑞𝑣 et 𝐻 représentent le débit réel moyen du liquide et la
hauteur réelle engendrée par la pompe.
Rendement interne 𝜂𝑖 (ou indiqué)
Il est évident que la puissance utile𝑃𝑖 est inférieure à la puissance théorique indiquée
à cause des différents frottements interne du fluide et aux frottements fluide-parois,
les pertes de charges aux valves .., on caractérise ses différentes pertes en
définissant le rendement indiqué:
𝑃𝑖 𝑔𝜌𝑞𝑣 𝐻
𝜂𝑖 = 𝑃 = 𝑔𝜌𝑞 . (1.33)
𝑖𝑡ℎ 𝑣.𝑡ℎ 𝐻𝑡ℎ
On y voit apparaitre le produit de 2 rendements, à savoir le rendement volumétrique
précédemment défini (1.27) et le rendement hydraulique défini comme :
𝐻
𝜂ℎ𝑦𝑑 = 𝐻 . (1.34)
𝑡ℎ
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 17 | 47
Fig. 1.9. Puissances et rendements
Rendement global
Le rapport entre la puissance utile𝑃𝑢 et la puissance à l’arbre𝑃𝑚 s’appelle rendement
global, (total ou effectif). Ce rendement a pour expressions:
𝑃 𝜌𝑞𝑣 𝑔𝐻 𝜌𝑞 𝑔𝐻𝑡ℎ
𝜂𝑒𝑓𝑓 = 𝑃𝑢 = 𝜌𝑞 . 𝑣𝑡ℎ , (1.34)
𝑚 𝑣𝑡ℎ 𝑔𝐻𝑡ℎ 𝑃𝑚
𝜂𝑒𝑓𝑓 = 𝜂𝑣𝑜𝑙 . 𝜂ℎ𝑦𝑑 . 𝜂𝑚 , (1.35)
𝜂𝑒𝑓𝑓 = 𝜂𝑖 . 𝜂𝑚 . (1.36)
Le rendement effectif ou global est donc le produit des rendements volumétrique
𝜂𝑣𝑜𝑙 = 𝜌⁄𝜌𝑣 , hydraulique
𝜂ℎ𝑦𝑑 = 𝐻⁄𝐻𝑡ℎ et mécanique
𝜂𝑚 = 𝑃𝑖𝑡ℎ ⁄𝑃𝑚 . Il est déterminé expérimentalement et
est de l’ordre de… 65 … .85% … Le produit 𝜂𝑣𝑜𝑙 . 𝜂ℎ𝑦𝑑 est
appelé rendement interne 𝜂𝑖 (ou rendement indiqué).
Pulsation du débit à l’aspiration (au refoulement)
Dans cette section on considère le débit à l’aspiration ou au refoulement, le
fonctionnement théorique nous a montré que le débit instantané présente en
moyenne un très grand écart par rapport au débit théorique moyen. Cet état de chose
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 18 | 47
est source de beaucoup de problèmes, les pulsations du débit réel induisent des
grandes fluctuations de pression et occasionnent des vibrations.
Comme solution, il est d’usage de régulariser ou d’uniformiser le débit à la sortie
et/ou à l’entrée de la pompe. Pour y arriver, on dispose principalement de deux
méthodes. La première méthode consiste à faire usage de pompes poly-cylindriques
dont les manivelles sont décalées judicieusement. La seconde méthode consiste en
l’utilisation d’un réservoir d’air de volume correctement dimensionné.
Pompes multi cylindriques
Dans cette section nous allons examiner le comportement du point de vue régularité
du débit de quelques pompes en vue de tirer des enseignements utiles. Dans ce but
considérons une machine multi-cylindrique possédant z cylindres avec des pistons à x
effets, nous obtenons,
∗
𝑞𝑣𝑡ℎ |𝑚𝑎𝑥
𝑟𝑧𝑥 = . (1.37)
𝑞𝑣𝑡ℎ
Notons que x ne peut prendre que 2 valeurs : (a) simple effet, x=1 ; (b) double
effet, x=2.
Pompe monocylindre simple effet
Pour une pompe monocylindrique simple effet le calcul conduit à
∗
𝑞𝑣𝑡ℎ |𝑚𝑎𝑥
𝑟11 = = 𝜋 ≅ 3,14.
𝑞𝑣𝑡ℎ
Pompe monocylindre double effet
De même pour une pompe monocylindrique double effet, si on néglige la section de
la tige du piston par rapport à la section du cylindre, un simple calcul donne la valeur
∗
𝑞𝑣𝑡ℎ |𝑚𝑎𝑥 𝜋
𝑟12 = = ≅ 1,57,
𝑞𝑣𝑡ℎ 2
Une pompe monocylindrique deux effets est équivalente à une pompe à deux
cylindres (cylindres de mêmes dimensions) simple effet dont les manivelles sont
décalées de 180°, on trouve 𝑟22 = 𝑟12 ≅ 1,57.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 19 | 47
Fig. 1.10. Pompe alternative à piston à double effet
Pompe à z cylindres simple effet
Considérons cette fois-ci une pompe constituée de z cylindres simples effets dont les
manivelles sont décalées uniformément l’un par rapport à l’autre d’un angle de 2 𝜋⁄𝑧.
L’utilisation de pompe à plusieurs cylindres a aussi pour but de:
- augmenter (par rapport au débit d’un seul cylindre) les débits instantanés
refoulés pour une même différence de pressions entre l’entrée et la sortie de la
pompe,
- réduire les pulsations du débit refoulé, les manivelles étant décalées
correctement les unes par rapport aux autres de la façon que voici:
2𝜋
𝛼𝑖 = 𝛼0 + 𝑖
𝑧
, avec 𝑖 = 0,1,2, … , 𝑧 − 1. (1.38)
𝛼0 est la valeur de la position angulaire origine du premier cylindre, valeur que l’on peut
prendre comme zéro.
Fig. 1.11. Pompes poly-cylindriques alternatives à piston simple effet
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 20 | 47
𝜋
Le débit instantané à l’aspiration 0 < 𝑡 < 𝜔, fourni par le cylindre i est repris par la
relation:
∗
𝑞𝑣𝑡ℎ |𝑖 = 𝑆. 𝑅𝜔. sin(𝛼𝑖 ),
2𝜋
𝑆. 𝑅𝜔. sin(𝜔𝑡 + 𝑖 𝑧
) (1.39)
, si sin(𝛼𝑖 ) > 0 , un débit est aspiré par le cylindre i son refoulement étant fermé ; si
sin(𝛼𝑖 ) < 0 la valve d’aspiration 𝑉𝑎 du cylindre i s’est
fermée tandis celle de refoulement 𝑉𝑟 qui s’est ouverte débite du liquide dans la
conduite de refoulement.
Tableau 1.2. Influence du type de la pompe sur la régularité du débit
Cylindre i
Le débit généré par le cylindre i est mieux repris par l’expression,
2𝜋
𝑞𝑣𝑡ℎ |𝑖 = 𝑘𝑆. 𝑅𝜔. sin|(𝜔𝑡 + 𝑖 𝑧
)|, (1.40)
, où on va prendre pour la fonction 𝑘 = 𝑘(𝑡) les valeurs reprises ci-dessous :
a) Aspiration
Lorsque
2𝜋
sin (𝜔𝑡 + 𝑖 ) > 0, alors 𝑘(𝑡) = 1,
𝑧
2𝜋
sin (𝜔𝑡 + 𝑖 ) < 0, 𝑎𝑙𝑜𝑟𝑠 𝑘(𝑡) = 0.
𝑧
Dans ces conditions quel que soit le temps t, le débit à l’aspiration est :
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 21 | 47
2𝜋
𝑞𝑣𝑡ℎ |𝑖𝑎𝑠𝑝 = 𝑘𝑆. 𝑅𝜔. sin|(𝜔𝑡 + 𝑖 𝑧
)|. (1.41)
b) Refoulement
Lorsque
2𝜋
sin (𝜔𝑡 + 𝑖 ) > 0, 𝑎𝑙𝑜𝑟𝑠 𝑘(𝑡) = 0,
𝑧
2𝜋
sin (𝜔𝑡 + 𝑖 ) < 0, 𝑎𝑙𝑜𝑟𝑠 𝑘(𝑡) = 1.
𝑧
Dans ces conditions quel que soit le temps t, le débit au refoulement vaut :
2𝜋
𝑞𝑣𝑡ℎ |𝑖𝑟𝑒𝑓 = 𝑘𝑆. 𝑅𝜔. sin|(𝜔𝑡 + 𝑖 𝑧
)|. (1.42)
Pompe entière
∗
𝑞𝑣𝑡ℎ𝑎𝑠𝑝 = ∑𝑧𝑖=1 𝑞𝑣𝑡ℎ𝑎𝑠𝑝−𝑖
∗
, pour l’aspiration et ∗
𝑞𝑣𝑡ℎ𝑟𝑒𝑓 = ∑𝑧𝑖=1 𝑞𝑣𝑡ℎ𝑟𝑒𝑓−𝑖
∗
pour le
refoulement.
Pompe à 3 cylindres simple effet manivelles décalées de 120°
La pompe poly-cylindrique avec 𝑧 = 3 dont les manivelles sont décalées de 120°,
conduit à la valeur :
𝑞𝑣𝑡ℎ |𝑚𝑎𝑥 𝜋
𝑟31 = = ≅ 1,047.
𝑞𝑣𝑡ℎ 3
Cette valeur est bien meilleure que celle obtenue avec𝑧 = 2𝑒𝑡𝑧 = 4.
Pompe à 4 cylindres simple effet manivelles décalées de 90°
Cette pompe génère pratiquement la même courbe de débit en fonction du temps
qu’une pompe à 2 cylindres double effet dont les manivelles sont décalées de 90°
ayant les mêmes dimensions de course et d’alésage.
Les calculs conduisent à la valeur
(𝑞𝑣.𝑖𝑛𝑠𝑡 )𝑚𝑎𝑥 𝜋√2
𝑟41 = 𝑟22 = = ≅ 1,11.
𝑞𝑣.𝑡ℎ 4
Ces deux types de pompes se comportent de la même façon au point de vue
génération du débit. On constate une diminution de la valeur de l’écart par rapport à
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 22 | 47
l’idéal, (𝑟𝑧𝑥 =1) qui a pour valeur 1, il est nettement plus élevé que celui produit par
la pompe poly-cylindrique avec 3 pistons simple effet, plus de 10 %!
On montre que les pompes à nombre de cylindres impair sont préférables à celles qui
ont un nombre pair de cylindres. En pratique une pompe de 𝑧 pistons pairs se
comporte au point de vue régulation de débit comme une pompe de 𝑧⁄2 pistons
impairs sauf pour 𝑧 = 2.Un nombre impair de cylindres est nettement plus favorable
qu’un nombre pair de cylindres du point de vue régularisation du débit, pour 𝑛 > 1.
Réservoir d’air
Principe
La deuxième méthode consiste à suivre les conseils donnés il y a presque 3000 ans
par Joseph fils de Jacob au Pharaon d’Egypte sur les vaches grasses et les vaches
maigres (Genèse 41), à savoir: faire des réserves lors d’une période d’excédents et
puiser dans ces réserves pendant le temps de pénurie, de famine qui vient après
pour combler les déficits par rapport à la consommation moyenne. A partir de cette
inspiration sont nés les volants d’inertie, les capacités (électricité), … et les réservoirs
d’air modernes.
Utilisations d’un réservoir d’air
Pour accroître l’uniformité du débit en cours de fonctionnement, il est recommandé
de placer un réservoir d’air à la sortie (et/ou à l’entrée) de la pompe suivant la partie
du circuit dont on veut s’occuper pour régulariser le débit. Ce réservoir d’air, outre
son usage pour la régularisation du débit peut agir également comme réserve
d’énergie dans les circuits hydrauliques ou comme vase d’expansion (pour reprendre
les dilatations) ou comme dispositif anti-coup de bélier. Il peut donc jouer plusieurs
rôles à la fois, pourvu qu’il soit bien dimensionné pour ces usages.
Fonctionnement
Pour simplifier le raisonnement et à titre d’illustration de la méthode, considérons
une pompe monocylindrique simple effet et admettons que le réservoir d’air se trouve
au refoulement.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 23 | 47
Figure 1.12. Réservoir d’air pour régulariser le débit
A la section d’entrée 1 du réservoir d’air un débit théorique instantané 𝑞𝑣𝑡ℎ
∗
y entre,
on impose qu’à sa section de sortie 2, le débit soit égal au débit théorique moyen
𝑞𝑣𝑡ℎ . Le réservoir d’air devra jouer le rôle d’une capacité qui emmagasine l’excédent
du liquide pendant la période (des vaches grasses) où le débit théorique instantané
au refoulement, à travers la section s, (donc aussi la section 1 entrée du réservoir
d’air) est supérieur au débit moyen théorique, 𝑞𝑣𝑡ℎ
∗
> 𝑞𝑣𝑡ℎ . Le débit à travers la section
de sortie 2 du réservoirest pendant ce temps maintenu égal au débit théorique
moyen. Lorsque survient la phase des vaches maigres, où le débit instantané
théorique est inférieur au débit moyen théorique
∗
𝑞𝑣𝑡ℎ < 𝑞𝑣𝑡ℎ , le réservoir d’airne reçoit à son entrée 1
qu’un faible débit qui va passer directement vers la section 2. La compensation du
déficit du débit de la section 1, (𝑞𝑣𝑡ℎ − 𝑞𝑣𝑡ℎ
∗
) nécessaire afin de ramener la valeur du
débit au niveau 𝑞𝑣𝑡ℎ est exécutée par le réservoir
d’air, qui restitue la quantité requise.
Dimensionnement du réservoir d’air
On représente dans le plan (p, V) le diagramme de Watt de l’évolution du débit
instantané à l’aspiration. La figure 1.13. montre que la durée du cycle vaut𝑇 = 𝑡𝐹 − 𝑡𝐴 .
Il y a deux phases dans ce cycle: la phase de stockage (ou d’emmagasinement, ou
des vaches grasses, [𝑡𝐴 , 𝑡𝐶 ]) et celle de déstockage (ou de restitution, ou des vaches
maigre, [𝑡𝐶 , 𝑡𝐹 ]).
Tableau 1.3. Fonctionnement du réservoir d’air
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 24 | 47
Fig. 1.13. Débit instantané à l’aspiration irrégulier à régulariser à l’aide d’un
réservoir d’air
Phase de stockage
Le réservoir d’air de volume limité contient de l’air et du liquide. Pendant la période
[𝑡𝐴 , 𝑡𝐶 ] le réservoir d’air emmagasine du liquide, le volume du liquide augmente, celui
du gaz diminue ; l’état de l’air passe de (𝑉𝑚𝑎𝑥 , 𝑝𝑚𝑖𝑛 )au temps 𝑡𝐴
à l’état (𝑉𝑚𝑖𝑛 , 𝑝𝑚𝑎𝑥 ) au temps 𝑡𝐶 . Le volume qui
𝑡𝐶
traverse la section 1 pendant ce temps est proportionnel à 𝑙’𝑎𝑖𝑟𝑒(𝐴𝐵𝐶𝐴) = ∫𝑡𝐴 𝑞𝑣𝑡ℎ
∗
𝑑𝑡.
(1.43)
Pendant ce même temps(𝑡𝐶 − 𝑡𝐴 ) la section 2 a débité un volume correspondant à
𝑡𝐶
l’aire (𝑀𝐴𝐶𝑁𝑀) = ∫𝑡𝐴 (𝑞𝑣𝑡ℎ
∗
− 𝑞𝑣𝑡ℎ )𝑑𝑡. (1.44)
Le bilan de masse (fluide incompressible) conduit au volume emmagasiné dans le
réservoir d’air. Ce volume correspond à l’aire(𝐴𝐵𝐶𝐴). Cette première période
correspond au point de vue fonctionnement du réservoir d’air à la phase de stockage
du liquide, c’est la période des vaches grasses !
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 25 | 47
Phase de déstockage
Le volume liquide qui traverse la section 1 pendant le temps compris entre 𝑡𝐶 et 𝑡𝐹 est
représenté par l’aire(𝑁𝐶𝐷𝐸𝐹𝐺𝑁). Durant ce même temps la section 2 fait passer un
volume qui correspond à l’aire(𝑁𝐶𝐹𝐺𝑁) aire nettement bien supérieure à
l’aire(𝑁𝐶𝐷𝐸𝐹𝐺𝑁). La surface représentative du volume restitué, venant du réservoir
d’air vaut l’aire(𝐶𝐹𝐸𝐷𝐶). La conservation de la masse montre que
𝑎𝑖𝑟𝑒(𝐴𝐵𝐶𝐴) = 𝑎𝑖𝑟𝑒(𝐶𝐹𝐸𝐷𝐶).
Théorie approchée
En fonctionnement le volume d’air fluctue entre les valeurs 𝑉𝑚𝑎𝑥 et 𝑉𝑚𝑖𝑛 associés
respectivement aux pressions 𝑝𝑚𝑖𝑛 et 𝑝𝑚𝑎𝑥 , cet air est en contact permanent avec le
liquide, éventuellement au travers d’une membrane élastique. Le liquide possédant
une grande capacité thermique, sa température reste constante. L’air subit des
différences de pression qui sont faibles. Comme première approximation, on fait
l’hypothèse que pendant tout le temps l’air comme le liquide se maintient aussi à une
température constante, c’est à dire que toutes les transformations qu’il subit sont
isothermes. L’air est supposé être un gaz parfait.
On définit un coefficient d’irrégularité:
𝑝𝑚𝑎𝑥 −𝑝𝑚𝑖𝑛
𝛿= 𝑝𝑚𝑜𝑦
(1.45)
, avec
𝑝𝑚𝑎𝑥 +𝑝𝑚𝑖𝑛
𝑝𝑚𝑜𝑦 = 2
. (1.46)
Le coefficient d’irrégularité idéal est𝛿 = 0, c’est dire que𝑝𝑚𝑎𝑥 = 𝑝𝑚𝑖𝑛 = 𝑝𝑚𝑜𝑦 . On
cherchera donc pour un réservoir d’air économique une petite valeur du coefficient
d’irrégularité. Les valeurs couramment rencontrées sont:
- sur le refoulement: 𝛿 = ⋯ 0,02 … ,
- sur l’aspiration: 𝛿 = ⋯ 0,04 … 0,05 …
Dans le réservoir d’air c’est la loi des gaz parfait : 𝑝𝑉 = 𝐶 𝑡𝑒 qui s’applique, on a donc:
𝑝𝑚𝑖𝑛 𝑉𝑚𝑎𝑥 = 𝑝𝑚𝑎𝑥 𝑉𝑚𝑖𝑛 .
En posant 𝛥𝑉 = 𝑉𝑚𝑎𝑥 − 𝑉𝑚𝑖𝑛 , valeur qui correspond à l’aire(𝐴𝐵𝐶𝐴), et en explicitant la
valeur de 𝑉𝑚𝑎𝑥 , on trouve:
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 26 | 47
1 1
𝑉𝑚𝑎𝑥 = 𝛥𝑉(2 + 𝛿 ). (1.47)
Cette expression donne le volume minimum du réservoir susceptible de respecter le
coefficient d’irrégularité 𝛿 imposé.
Comme les valeurs de 𝛿sont très faibles,1⁄𝛿 est très grand devant 1/2. On néglige
donc cette dernière valeur devant 1⁄𝛿 . L’expression
du volume du réservoir d’air devient:
𝛥𝑉
𝑉𝑚𝑎𝑥 > 𝛿
. (1.48)
Sans membrane de séparation, l’air est généralement en contact intime avec le
liquide, ce qui occasionne une fuite continu d’air par entraînement. Pour y remédier,
on utilise un reniflard, c’est une petite soupape dont la butée réglable permet
d’introduire dans le cylindre de la machine des petites quantités d’air pour compenser
ces fuites d’air.
Réglage du débit
On a montré que le débit réel moyen d’une pompe volumétrique monocylindrique
avec un piston à x effet(s)vaut
𝐷2
𝑞𝑣 = 𝜂𝑣𝑜𝑙 𝑞𝑣𝑡ℎ = 𝑥𝜂𝑣𝑜𝑙 (𝜋 )𝐶𝑛. (1.49)
4
Pour une pompe poly cylindrique avec 𝑧 cylindres identiques et des pistons à x
effet(s), le débit réel est :
𝐷2
𝑞𝑣 = 𝑧. 𝑥𝜂𝑣𝑜𝑙 (𝜋 4
)𝐶𝑛. (1.50)
Donc en généralisant pour tout type de pompe , on aura :
𝐷2
𝑞𝑣 = 𝐾𝜂𝑣𝑜𝑙 (𝜋 4
)𝐶𝑛 (1.51)
où 𝐾 = 𝐾(𝑥, 𝑧) est un facteur qui dépend du type de pompe, 𝐾 est proportionnel au
nombre d’effet et au nombre de cylindres, ...n est la fréquence de rotation de l’arbre.
Pour modifier le débit, on peut agir sur l’un des facteurs qui figure dans la formule
du débit.
Une action sur le rendement volumétrique est possible sur certaines pompes, mais
elle est rarement utilisée à cause de la baisse du rendement global que cette action
occasionne. Dans certaines petites machines il est possible de changer la course C
en agissant sur le bouton de la manivelle dont on peut modifier la position. Beaucoup
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 27 | 47
de pompes agissent sur le nombre de cylindres, en en activant certains et en laissant
d’autres sans action.
La méthode principale utilisée pour faire varier le débit d’une pompe volumétrique
est de changer sa fréquence de rotation n. Cela se fait soit par utilisation d’un moteur
d’entraînement à vitesse variable (machine chère) soit par utilisation d’une boîte de
vitesse (composant aussi onéreux). Mais il faut souligner qu’en cette époque la
tendance est toujours de chercher les économies d’énergie donc privilégier le
rendement global donc l’utilisation d’une variation de vitesse s’impose.
Courbes caractéristiques. Point de fonctionnement
Considérons une pompe monocylindrique placée dans un circuit hydraulique simple
limité aux extrémités par deux capacités, réservoir A en amont et réservoir B en aval.
Le fluide liquide est incompressible de masse volumique𝜌,les niveaux des surfaces
libres amont et aval sont 𝑧𝐴 et 𝑧𝐵 , les pressions qui y
règnent 𝑝𝐴 et 𝑝𝐵
. On néglige les pulsations de débit, seul est pris en
compte le débit réel moyen qv
.
Appliquons successivement l’équation de Bernoulli dans les conduites d’aspiration et
de refoulement :
- conduite d’aspiration : entre la surface libre de A et l’entrée de la pompe e,
- conduite de refoulement : entre la sortie de la pompe s et la surface libre
de B.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 28 | 47
Fig. 1.14. Installation d’une pompe alternative à piston
Additionnons ensuite membre à membre les relations précédentes. Après
réarrangement des termes le résultat de cette manipulation peut se mettre sous la
forme :
2 2
𝑝𝑠 −𝑝𝑒 𝑐𝑠2 −𝑐𝑒2 𝑝𝐵 −𝑝𝐴 𝑐𝐵 −𝑐𝐴
+ (𝑧𝑠 − 𝑧𝑒 ) + = + (𝑧𝐵 − 𝑧𝐴 ) + + (𝛥ℎ𝐴𝑒 + 𝛥ℎ𝑠𝐵 ). (1.52)
𝑔𝜌 2𝑔 𝑔𝜌 2𝑔
Le membre de gauche constitue la hauteur développée par la pompe, celui de droite
représente la résistance qu’oppose le circuit. Pratiquement pour les pompes (fluide
liquide), on a généralement 𝑧𝑒 ≅ 𝑧𝑠 et 𝑐𝑒 ≅ 𝑐𝑠 . Ce qui simplifie l’expression de la
hauteur développée par la pompe :
𝑝𝑠 −𝑝𝑒
𝐻𝑃 = 𝜌𝑔
.
Cette expression ne s’applique pas aux ventilateurs (fluide non pesants, gaz) où les
trois termes du membre de gauche sont pratiquement du même ordre de grandeur.
L’ordonnée à l’origine de la caractéristique du circuit s’écrit :
Courbes caractéristiques de la pompe
Le membre de gauche de la relation précédente représente la hauteur énergétique
totale ou la hauteur développée (ou engendrée) par la pompe
𝐻𝑃 . C’est l’accroissement de l’énergie totale par unité
de poids de fluide entre les sections d’entrée e et de sortie s de la pompe. Les deux
derniers termes de ce membre de gauche sont le plus souvent négligeables devant
le premier.
On appelle courbe caractéristique de la pompe la courbe de la variation de la pression
(hauteur) engendrée par cette machine en fonction du débitvolumétrique
𝐻𝑃 = 𝐻𝑃 (𝑞𝑣 ) pour une vitesse de rotation constante,(un régime𝑛 = 𝐶 𝑡𝑒 ). A cette
première courbe on associe aussi celle de la puissance mécanique nécessaire à
l’entrainement 𝑃𝑚 = 𝑃(𝑞𝑣 ) et du rendement global en fonction du débit 𝜂 = 𝜂(𝑞𝑣 )
pour la même fréquence de rotation n fixée. La
hauteur engendrée par la pompe vaut :
𝑝𝑠 −𝑝𝐸 𝑐𝑆2 −𝑐𝐸2
𝐻𝑃 = 𝑔𝜌
+ (𝑧𝑆 − 𝑧𝐸 ) + 2𝑔
= 𝐻𝑃 (𝑞𝑣 ). (1.53)
Soulignons qu’une pompe volumétrique produit le débit nécessaire pour
l’établissement de la pression, mais ne peut d’elle-même produire une pression, ne
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 29 | 47
pouvant créer de résistance à son propre écoulement. Cette résistance est causée
par les tuyauteries, les singularités (étranglements, élargissements, coudes, …) et
les appareils qui y sont montés.
Nous avons montré que pour un fonctionnement théorique,
𝐷2
le débit 𝑞𝑣𝑡ℎ = 𝐾. (𝜋 4
)𝐶𝑛 est indépendant de la
hauteur engendrée théorique 𝐻𝑡ℎ Théoriquement on
peut donc créer n’importe quelle niveau de pression, la courbe 𝐻𝑡ℎ = 𝐻(𝑞𝑣 ) est une
droite verticale parallèle à l’axe des 𝐻. Pour un fonctionnement réel, le débit de fuite
𝑞𝑣𝑓 augmente avec l’accroissement de la pression développée le régime étant fixé (
à 𝑛 = 𝐶 𝑡𝑒 ). Il y a donc incurvation de la courbe réelle 𝐻 = 𝐻(𝑞𝑣 ) de plus en plus vers
la gauche lorsque la pression engendrée augmente, Fig. 1.15.
Caractéristique du circuit hydraulique
La courbe caractéristique du circuit est celle tracée en prenant en ordonnée la hauteur
résistante du circuit et en abscisse le débit. Le membre de droite n’est autre que la
résistance hydraulique totale du circuit𝐻𝐶 . Celle ci est composée de la hauteur
𝑝𝐵 −𝑝𝐴
statique de l’installation 𝐻𝐶0 = 𝜌𝑔
+ (𝑧𝐵 − 𝑧𝐴 ) à laquelle s’ajoutent les pertes de
charges (le dernier terme composé des pertes de charge dans les conduites
d’aspiration 𝐴𝑒 et de refoulement 𝑠𝐵, dont la somme vaut : ∆ℎ = 𝑅𝐴𝐵 𝑞𝑣2
. Le terme dynamique est généralement faible
devant les autres, les sections des réservoirs au niveau des surfaces libres étant
généralement très grandes par rapport à la section des conduites.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 30 | 47
Fig. 1.15. Point de fonctionnement d’une pompe alternative à piston
(a) Point A1 pour la vitesse de rotation n1<n2,
(b) Point A2 pour la vitesse de rotation n2.
𝑝𝐵 −𝑝𝐴
𝐻𝐶 = 𝑔𝜌
+ (𝑧𝐵 − 𝑧𝐴 ) + (𝛥ℎ𝐴𝑒 + 𝛥ℎ𝑠𝐵 ) (1.54)
𝐻𝐶 = 𝐻𝐶0 + 𝑅. 𝑞𝑣2 , (1.55)
où :
𝑝𝐵 −𝑝𝐴
𝐻𝐶0 = 𝑔𝜌
+ (𝑧𝐵 − 𝑧𝐴 ), (1.56)
et
𝛥ℎ𝐴𝐵 = 𝑅. 𝑞𝑣2 = (𝛥ℎ𝐴𝑒 + 𝛥ℎ𝑠𝐵 ) (1.57)
𝛥ℎ𝐴𝐵 , représente les pertes de charge linéaires et singulières des éléments
composants les conduites d’aspiration et de refoulement.
Point de fonctionnement de la pompe placée sur le circuit hydraulique
Comme nous voyons dans la relation l’égalité de la hauteur engendrée par la pompe
et la hauteur résistance du circuit hydraulique, le point de fonctionnement de la
pompe sur ce circuit est définit comme l’intersection de la courbe caractéristique du
circuit et de la courbe caractéristique de la pompe𝐻𝑃 (𝑞𝑣 ) = 𝐻𝐶 (𝑞𝑣 ). La représentation
graphique est donnée sur la figure 1.15. Les points A1 et A2 sont des points de
fonctionnement de la pompe placée sur ce circuit hydraulique lorsqu’elle opère aux
vitesses n1 et n2 respectivement, avec n1<n2.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 31 | 47
Cavitation
Ce phénomène généré par une baisse de pression en dessous de la pression de
saturation du liquide à sa température en un point M de l’écoulement 𝑝𝑀 < 𝑝𝑠𝑎𝑡 (𝑇) ,
occasionne la naissance, la croissance suivie de l’implosion de bulles de vapeur
lorsque la pression remonte au-dessus de la pression de saturation
𝑝𝑀 > 𝑝𝑠𝑎𝑡 (𝑇). La cavitation se manifeste par la formation de cavités dans le liquide
pompé et est accompagnée de vibrations bruyantes, d'une réduction du débit liquide
et, de façon moindre, du rendement de la pompe. Elle est provoquée par le passage
rapide d’une très grande multitude de petites bulles de vapeur à travers la pompe,
leur implosion crée des micro-jets qui impactent aussi les parois et peuvent
provoquer des dommages sérieux ces parois solides de la machine.
Pour établir les conditions de non cavitation d’une pompe volumétrique, on va tenir
compte du caractère pulsatoire du débit dans la tuyauterie d’aspiration. L’équation
de Bernoulli pour un fluide en mouvement non permanent entre les points 1 et 2 est:
𝑝 𝑐2 𝑠 𝜕𝑐
∆(𝑧 + 𝜌𝑔 + 2𝑔 + 𝑔 𝜕𝑡 )12 = ∆ℎ𝑓 |12 (1.58)
, s est la coordonnée courante le long du tube de courant entre les points 1 et 2.
Dans la pompe volumétrique, le mouvement variable du fluide est imposé par le
mouvement du piston. On admet que la pompe fonctionne sans qu’il y’ait cavitation,
le fluide au contact avec le piston a la même vitesse que celui-ci, la vitesse et
l’accélération du piston sont données par :
𝑣𝑃 = 𝑅𝜔sin(𝜔𝑡)
𝑎𝑃 = 𝑅𝜔2 cos(𝜔𝑡)
Soient 𝑆 𝑒𝑡 𝑆𝐶 les aires de la section du cylindre et de la
conduite d’aspiration.La conservation du débit conduit à l’expression de la vitesse 𝑐𝐶
dans la conduite d’aspiration,
𝑆
𝑐𝐶 = 𝑆 . 𝑅𝜔sin(𝜔𝑡). (1.59)
𝐶
De même pour l’accélération dans cette conduite, on a:
𝑆
𝑎𝐶 = 𝑆 . 𝑅𝜔2 [1 − cos(𝜔𝑡)]. (1.60)
𝐶
Lorsque le piston arrive au point mort extérieur et qu’il change son sens de
déplacement et qu’il commence son mouvement d’aspiration son accélération est au
maximum et la pression dans le cylindre est sensiblement affectée par l’inertie du
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 32 | 47
liquide qui suit immédiatement le piston. A priori, il semble donc que les risques de
cavitation soient les plus importants en un point M situé au voisinage de la section
d’entrée dans le cylindre ou dans la pompe juste après la valve d’aspiration, ou en
un point P situé contre la face active du piston.
Ecrivons Bernoulli entre A situé sur la surface libre du réservoir amont, et le point M
et ensuite entre A et P,
𝑝𝐴 𝑝𝑀 1 𝑙
𝑧𝐴 + = 𝑧𝑀 + + (𝑐𝑀 )2 + ∆ℎ𝑓 |𝐴𝑀 − 𝑎𝐶 ,
𝜌𝑔 𝜌𝑔 2𝑔 𝑔
𝑝 𝑝 1 𝑙 𝜁𝑅
𝑧𝐴 + 𝜌𝑔𝐴 = 𝑧𝑃 + 𝜌𝑔𝑃 + 2𝑔 (𝑐𝑃 )2 + ∆ℎ𝑓 |𝐴𝑃 − (𝑔 𝑎𝐶 + 𝑎 )
𝑔 𝑃
(1.61)
, où :
i : représente soit le point M, soit le point P,
𝑙 = 𝑠𝐴 − 𝑠𝑖 , est la longueur de la conduite d’aspiration.
𝜁𝑅: représente le déplacement du piston compté à partir du PME,
∆ℎ𝑓 |𝐴𝑖 : représente les pertes de charge continues et localisées dans toute la tuyauterie
d’aspiration, y compris celle singulière dans la valve d’aspiration, i = P.
Selon la configuration de la pompe, la pression minimale va apparaître soit au point
M soit au point P pour une valeur déterminée 𝛼𝑀 ou 𝛼𝑃 la position angulaire de l’arbre;
notons 𝑝𝑚𝑖𝑛 la valeur de
cette pression. Pour éviter la cavitation, il faut toujours que cette pression minimale
soit supérieure à la pression de saturation du liquide correspondant à la température
locale 𝑇𝑙𝑖𝑞 du liquide baignant le point considéré,
𝑃𝑚𝑖𝑛 > 𝑝𝑠𝑎𝑡 (𝑇𝑙𝑖𝑞 ).
Hauteur d’aspiration
En pratique il faut toujours maintenir une marge de sécurité ∆𝑝𝑎 pour éviter un
dégagement trop important desgaz dissous dans le liquide.
On définit la capacité pratique d’aspiration:
(𝑝𝑠𝑎𝑡(𝑇)+∆𝑝𝑎 ) 1 𝑆 𝑙 𝑆 𝑑𝛺
ℎ𝑎𝑠𝑝,𝑚𝑎𝑥 = (𝑧𝑖 − 𝑧𝐴 )𝑚𝑎𝑥 = 𝑝𝐴 − − ∆ℎ𝑓 |𝐴𝑖 − ( 𝑅𝜔𝛺)2 + 𝑅𝜔2
𝜌𝑔 2𝑔 𝑆𝑐 2𝑔 𝑆𝑐 𝑑𝛼
(1.62)
, où 𝛺 = sin𝛼, les trois derniers termes du membre de gauche sont tous
proportionnels à 𝑐 2.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 33 | 47
Une simple analyse conduit aux constats suivants:
- la tension de vapeur locale 𝑝𝑠𝑎𝑡 (𝑇) augmente avec la température du
liquide𝑇, donc des valeurs élevées de celle ci sont défavorables à la capacité
pratique d’aspiration au point que quelque fois on est obligé de mettre la
pompe en charge ℎ𝑎𝑠𝑝 < 0 ;
𝑑𝛺
- 𝑑𝛼
< 0 pendant la première partie de l’aspiration lorsque le fluide est
𝑑𝛺
accéléré dans la conduite, et 𝑑𝛼
> 0dans la
seconde partie où le fluide est décéléré;
- la pression 𝑝𝐴 diminue lorsque l’altitude z augmente, donc la capacité
pratique d’aspiration d’une pompe dont le réservoir amont est ouvert à
l’atmosphère diminue lorsqu’elle est installée à haute altitude. En première
approximation, on admet une chute de 1.1m par 1000m pour 0 < z < 3000
m.
- si la conduite est longue, le dernier terme est prépondérant;
- les trois derniers termes sont proportionnels à la vitesse au carré, il existe
une valeur limite de vitesse à partir de laquelle la cavitation commence.
Des calculs analogues au refoulement montrent que le risque de cavitation ne
pourrait devenir appréciable que si la longueur de la tuyauterie est très grande. Dans
ce cas on installe toujours un réservoir d’air et le danger de cavitation est éliminé.
Amorçage
L’autoamorçage est la faculté de la pompe à opérer elle-même son amorçage. Au
démarrage, l’amorçage est le remplissage de la tuyauterie d’aspiration et de la
pompepar du liquide en opérant un retrait de l'air que celles-ci contenait. Une des
particularités intéressantes des pompes volumétriques est la possibilité
d’autoamorçage, c'est-à-dire qu’elles ont la capacité par elles-mêmes d’initier et de
parachever la montée du liquide dans la conduite d’aspiration remplie préalablement
de gaz. La pompe volumétrique fonctionne d’abord en pompe à vide, elle crée du
vide, dans ce vide vient s’engouffrer le liquide. Si la pompe peut créer le vide qu’il
faut, alors le liquide arrive dans le cylindre de la pompe, et le fonctionnement normal
peut dès lors commencer. Pour l’étude de l’autoamorçage, il faut connaître les
propriétés de la machine utilisée en pompe à vide.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 34 | 47
Si l’espace mort est trop grand, l’autoamorçage ne sera pas possible. Dans ce cas
une solution couramment retenue est une conduite d’aspiration comportant un clapet
de pieds pour retenir le liquide, cela est obligatoire pour les pompes dynamiques
(turbomachines).
Essais de pompes alternatives
Lorsqu’on procède à un essai d’une pompe de z cylindres identiqueset pistons à x
effet(s)de course C et alésage D, on mesure:
- le débit moyen réel: 𝑞𝑣 par l’une quelconque des méthodes courantes, soit
par exemple :
o empotage (remplissage d’une capacité de volume ∆𝑉 et chronométrage
du temps ∆𝑡 de remplissage), le débit réel vaut :𝑞𝑣 = ∆ 𝑉⁄∆ 𝑡,
o diaphragme avec mesures des pressions aux bornes de l’appareil
(manomètre différentiel,(𝑝2−𝑝1 )),
o venturi : mesures des pressions à la section d’entrée𝑝0 et au col𝑝𝑐 du
dispositif,
- la hauteur engendrée ou développée est
𝑝𝑠 −𝑝𝑒
𝐻= , (1.63)
𝜌𝑔
(mesures de la pression 𝑝𝑒 à l’entrée e et 𝑝𝑠 à la sortie s de la pompe);
- la fréquence de rotation𝑛,
- la pression dans le volume variable de la pompe en fonction de la position
angulaire de l’arbre𝑝 = 𝑝(𝜗)𝑜𝑢𝑝 = 𝑝(𝑉),
- la puissance mécanique à l’arbre (à l’accouplement)𝑃𝑎𝑟 = 𝑃𝑚
On détermine ensuite par le calcul les éléments suivants:
- le débit théorique est calculé à partir des dimensions géométriques de la
pompe et de la fréquence de rotation de l’arbre :
𝜋𝐷 2
𝑞𝑣𝑡ℎ = 𝑛. 𝑥𝑧 4
. 𝐶; (1.64)
- le travail interne (ou indiqué)𝑊𝑖 est obtenu par planimétrage ;
- la puissance utile (ou la puissance interne, ou puissance indiquée), 𝑃𝑢 = 𝑃𝑖 =
𝑔𝜌𝑞𝑣 𝐻,
𝐻 est la hauteur réelle développée par la pompe ;
- la puissance moyenne indiquée théorique
𝜋𝐷 2
𝑃𝑖𝑡ℎ = 𝑛𝑥𝑧. . 𝐶(𝑝2 − 𝑝1 ) = 𝑔𝜌𝑞𝑣𝑡ℎ 𝐻𝑡ℎ ; (1.65)
4
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 35 | 47
- la hauteur théorique développée par la pompe vaut donc
𝑃
𝐻𝑡ℎ = 𝑔𝜌𝑞𝑖𝑡ℎ ; (1.66)
𝑣𝑡ℎ
- le rendement volumétrique :
𝑞𝑣
𝜂𝑣𝑜𝑙 = 𝑞 ; (1.67)
𝑣𝑡ℎ
- le rendement interne ou indiqué :
𝑃 𝑞𝑣 𝐻
𝜂𝑖 = 𝑃 𝑢 = 𝑞 (1.68)
𝑖𝑡ℎ 𝑣𝑡ℎ 𝐻𝑡ℎ
- le rendement global :
𝑃
𝜂𝑒𝑓𝑓 = 𝑃𝑢 ; (1.69)
𝑚
- le rendement hydraulique :
𝐻 𝜂𝑖
𝜂ℎ𝑦𝑑 = = ; (1.70)
𝐻𝑡ℎ 𝜂𝑣𝑜𝑙
- le rendement mécanique:
𝑃𝑖𝑡ℎ 𝜂𝑒𝑓𝑓
𝜂𝑚 = 𝑃𝑚
=𝜂 ; (1.71)
ℎ𝑦𝑑 𝜂𝑣𝑜𝑙
La puissance à l’arbre ou puissance effective𝑃𝑚 peut se déduire aussi à partir des
indications des mesures effectuées sur le moteur électrique d’entraînement (ou sur
le moteur à combustion interne, ..) et de la transmission.
On parvient ainsi à connaître tous les paramètres de fonctionnement d’une pompe
alternative à piston.
Pompe à membrane
Dans les pompes à diaphragme, appelées aussi pompes à membrane, le fluide
n’entre pas en contact avec les éléments mobiles de la machine. Ces pompes sont
donc bien adaptées au pompage des liquides corrosifs ou/et chargés de particules
solides.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 36 | 47
Pompe à membrane
Pompes et moteurs rotatifs
Les pompes et les moteurs sont des appareils qui convertissent l'énergie hydraulique
en énergie mécanique (moteurs) ou inversement (pompes).Les chambres d'une
pompe volumétrique sont des espaces ménagés sur la voie du liquide qui se ferment
périodiquement, c'est-à-dire qui s'isolent aussi bien de la tubulure d'aspiration de la
pompe (moteur) que de sa tubulure de refoulement. Les éléments de refoulement
sont des éléments mobiles de la pompe qui évacuent directement le liquide des
chambres de la pompe. Pour une pompe possédant z éléments de refoulement, le
volume caractéristique refoulé périodiquement par un tel élément de refoulement est
noté 𝑉1 . Dans ce cas, le débit volumétrique théorique moyenest
𝑞𝑣𝑡ℎ = 𝑧𝑛𝑉1 , (1.72)
où :
- 𝑉1 est le volume théorique engendré par un élément correspondant à un
tour de l’arbre,
- n : est la fréquence de rotation.
Beaucoup de pompes et moteurs hydrauliques sont du point de vuetechnologique
similaires aux compresseurs ou moteurs pneumatiques volumétriques correspondants.
Le principe de fonctionnement de la pompe est invariablement le même, il est composé
des trois séquences suivantes :
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 37 | 47
i) remplissage d’un élément de refoulement de la pompe du côté de l’aspiration
[1-2],
ii) isolation hermétique (fermeture) de cet élément entre les sections
d’aspiration et de refoulement [2-3],
iii) refoulement du liquide de l’élément de refoulement dans la ligne de
refoulement [3-4],
iv) remplissage … on reprend la séquence i), et ainsi de suite.
Pompes hydrauliques
La pompe hydraulique puise généralement, par aspiration le fluide dans un réservoir
approprié et elle débite ce fluide par son coté refoulement. Ses caractéristiques
principales sont la cylindrée et sa capacité à résister à la pression. Une pompe ne
crée pas de pression, mais un débit. C'est la résistance du circuit (ou du récepteur,
moteur ou vérin) qui crée par son travail une montée en pression. Comme nous
l’avons précédemment souligné lors de l’étude de la pompe alternative à piston, un
limiteur de pression est l'élément de sécurité indispensable. Il existe plusieurs types
de pompes hydrauliques, les principaux sont : pompes à palettes, pompes à
engrenages, pompes à vis et pompes à pistons
Moteurs hydrauliques
Ils fonctionnent suivant trois principaux modes: - rotation illimité; - rotation limité; -
mouvement linéaire. Les moteurs dont le mouvement de rotation est illimité sont tous
identiques aux pompes hydrauliques correspondantes, c'est à dire par exemple:
moteurs à piston, moteurs à engrenages, moteur à palettes ou moteurs à vis. Les
moteurs dont le mouvement de rotation est limité sont des moteurs qui ne tournent
qu'en deçà d'une révolution. Les moteurs pour les mouvements linéaires sont des vérins
hydrauliques. Ils peuvent être à simple ou à double effet, peuvent aussi avoir un ressort
construit à demeure, ou peuvent se présenter sous le type télescopique, posséder une
tige de piston simple ou qui traverse les deux couvercles du cylindre, etc. Les moteurs
hydrauliques transforment dans lessystèmes de commande hydrauliques l’énergie
produite par les pompes en énergie mécanique nécessaire à communiquer à une
charge en mouvement de rotation. Les moteurs hydrauliques ont, en général, la
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 38 | 47
même constitution que les pompes hydrauliques de même type. Ces machines
volumétriques permettent la mise en œuvre de grandes pressions et de débits faibles.
On peut classer ces machines volumétriques suivant les mêmes critères que pour les
pompes.
Pompes et moteurs à pistons
Pompes à pistons radiaux
Ces machines cf. Fig. 1.16. a) et b), sont réalisées avec un système cinématique
plan, ont un rotor disposé excentriquement par rapport au carter et dans lequel sont
percés les cylindres pour les plongeurs. Les pistons plongeurs sont disposés
radialement par rapport à l'axe. Ils se déplacent d’un mouvement alternatif de va et
vient radialement dans le rotor et sont entraînés en rotation par ce dernier. Par
l’intermédiaire de perçages radiaux, les cylindres communiquent tour à tour avec la
moitié gauche ou bien avec la moitié droite d’un perçage central divisé par une cloison
plane en deux chambres𝑉1 = 2𝑒. (𝜋𝐷 2 )⁄4
, où 𝐷𝑒𝑡𝑒 sont respectivement, le diamètre des plongeurs et l’excentricité.
Fig.1.16. Pompes et moteurs hydrauliques à pistons
Pompes à pistons axiaux
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 39 | 47
Ces machines rotatives se présentent comme des unités dont les pistons sont
disposés parallèlement à l'axe, la cinématique est spatiale. Ces pompes et moteurs
hydrauliques sont exécutés avec un plateau ou bien avec un bloc (rotor) incliné. Ces
unités sont adaptées, de par leur technologie, à des vitesses relativement élevées.
Elles peuvent être à cylindrée fixe ou variable. La gamme de pressions pouvant aller
jusqu'à 450 bars, tandis que les vitesses sont dans la plage …3000 à 4000 tr/mn,
Fig. 1.16. c) et d).
Pompes et moteurs à palettes
Les éléments mobiles sont pour ces machines constitués par des palettes. Le rotor
est disposé excentriquement par rapport au carter (stator) ce qui fait qu’au cours de
la rotation du rotor, les palettes se déplacent d’un mouvement rectiligne de va et
vient relativement à ce dernier, Fig. 1.17. Les palettes sont constamment appliquées
sur la paroi du stator par la force centrifuge. Cette dernière est même surabondante,
et est cause d’usure.
Le liquide remplit l’espace entre deux palettes voisines qui, du fait de la rotation du
rotor, tout d’abord augmente progressivement, pendant un demi-tour (aspiration)
et, après avoir atteint sa valeur maximum, se ferme (isolement), pendant le demi-
tour suivant, le vol
ume décroît lors du refoulement.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 40 | 47
Fig. 1.17. Pompes et moteurs à palettes
Le volume du liquide qui est refoulé par tour par un élément de refoulement est
2𝜋(𝑅−𝑒)
𝑉1 = 2𝑒𝑏[ 𝑧
− 𝛿] (1.73)
, où
- R : rayon de l’alésage du stator,
- b : dimension des palettes dans la direction axiale,
- e : excentricité, écart entre les axes du rotor et du stator,
- z : nombre de cylindres,
- 𝛿: épaisseur des palettes.
𝑞𝑣𝑡ℎ = 𝑛𝑉𝑐𝑦𝑙 = 𝑛𝑧𝑉1 = 2𝑛𝑒𝑏[2𝜋(𝑅 − 𝑒) − 𝑧𝛿] (1.74)
Le rotor est soumis à la pression de refoulement sur la moitié de sa surface, il en
résulte une poussée importante qui fait fléchir l’arbre. La pression max développée
est couramment de l’ordre de 70 à 100 bars, les vitesses sont modérées avec un
rendement 𝜂𝑒𝑓𝑓 = 60à80%.
Pompes et moteurs à engrenages
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 41 | 47
Il existe 2 types de ces machines à savoir :
- Pompes et moteurs à engrenages extérieurs,
- Pompes et moteurs à engrenages intérieurs.
a. Pompes et moteurs à engrenages extérieurs
Les éléments mobiles sont constitués par les dents de deux roues enfermées dans le
corps de pompe. L’élément de refoulement déplace en rotation le liquide dans l'espace
compris entre les dents des roues dentées et le stator de la pompe. L'espace clos
transportant le liquide est l'enfoncement entre deux-dents consécutives. Le liquide
est puisé dans l’espace d’aspiration, entre dans l’espace compris entre deux dents
consécutives (aspiration), le déplacement annulaire amène les pointes des deux dents
en contact étroit avec la paroi interne du stator (isolement), après un temps, les deux
dents se retrouvent dans l’espace de refoulement où une dent de l’autre roue chasse la
masse liquide (refoulement), fig. 1.18. a) et b). Le liquide refoulé se déplace dans un
plan perpendiculaire aux axes de rotation du rotor et de l’élément de refoulement.
Aucune soupape n’est présente dans cette pompe. Pour une pompe à engrenages avec
deux roues dentées de même géométrie, possédant chacune 𝑧 dents de module𝑚, on
estime que le volume refoulé par tour vaut le volume d’une couronne circulaire
ininterrompue de diamètre 𝐷𝑝 (diamètre primitif), de hauteur ℎ et de longueur𝑏.
Fig. 1.18. Pompes et moteurs hydrauliques à engrenages
ℎ = ℎ𝑎𝑢𝑡𝑒𝑢𝑟𝑑𝑒𝑛𝑡 − 𝑗𝑒𝑢|𝑓𝑜𝑛𝑑𝑑𝑒𝑛𝑡𝑢𝑟𝑒 .
Pour une denture normale, ℎ = 2𝑚 et 𝐷𝑝 = 𝑚𝑧, donc
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 42 | 47
𝑉1 = 𝜋𝐷𝑝 ℎ𝑏 = 𝜋𝑚𝑧ℎ𝑏,
𝑉𝑐𝑦𝑙 = 𝑧𝑉1 . (1.75)
Le débit moyen volumétrique théorique égale
𝑞𝑣𝑡ℎ = 𝑛𝑧. 𝑚𝑧ℎ𝑏. (1.76)
Le rendement volumétrique𝜂𝑣𝑜𝑙 = 80à90%. La construction est délicate, les arbres sont
fortement sollicités en flexion.
b. Pompes et moteurs à engrenages intérieurs
La pompe à engrenages intérieurs a une roue dentée interne, Fig. 1.18. c) et d), qui
tourne à l'intérieur d'une plus grande roue avec des dents sur sa périphérie. La plus
grande roue possède une dent de plus que la plus petite, et tourne autour d'un axe
décentré. La différence dans la vitesse de rotation crée d’abord un accroissement et
ensuite une diminution de l'espace fermé, lequel en retour génère l'action de pompage.
Machine Roots
Il existe plusieurs types de machines Roots. Deux pièces rotatives, dont la section
transversale a la forme d'un huit, sont placées à 90°. A chaque révolution, le débit
théorique est égal à quatre fois le volume de la zone hachurée.
Pompes et moteurs à vis
Le rotor, en forme de vis, est soit parallèle, soit intérieur à une autre vis qu'il entraîne.
Le fluide progresse, parallèlement à l'axe de rotation, d'un mouvement hélicoïdal,
dans les espaces fermés, limités par ces deux vis, fig. 1.19. Les pompes à vis
fonctionnent d’après le même principe que les pompes à engrenages, mais diffèrent
de ces dernières du fait qu’elles possèdent un système cinématique spatial. Ces
pompes présentent des avantages considérables, elles assurent un refoulement
absolument régulier, peuvent être utilisées à des vitesses de rotation très élevées.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 43 | 47
Fig. 1.19. Pompes à vis
Les grandeurs caractéristiques des pompes et moteurs
La cylindrée
C'est la quantité d'huile engendrée (aspirée ou refoulée) pendant un cycle. Elle
s'exprime en volume/tour. On distingue deux sortes de cylindrées:
- La cylindrée géométrique 𝑉𝑐𝑦𝑙 (ou théorique) qui est calculée sur plan à
partir des dimensions et forme des composants. Cette cylindrée ne tient
pas compte des fuites internes, c'est celle qu'aurait le composant s'il était
parfait,
- La cylindrée réelle 𝑉𝑐𝑟 qui tient compte des fuites internes. Ces fuites
dépendent de nombreux paramètres: viscosité de l'huile, pression
d'utilisation, vitesse d'utilisation, âge du composant, etc. La cylindrée réelle
est variable et fonction de ces paramètres. Cette cylindrée est déterminée
par le constructeur (essais) et elle est indiquée dans un catalogue en
fonction de différents paramètres.
Les rendements
- Le rendement volumétrique 𝜂𝑣𝑜𝑙 caractérise les fuites internes des
composants et dépend évidemment des mêmes paramètres que la
cylindrée réelle,
- Le rendement mécanique 𝜂𝑚 caractérise les pertes par frottements et les
pertes de charge internes,
- Le rendement global𝜂𝑔 , lui, caractérise le rapport entre la puissance entrant
dans le composant et celle qui en sort.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 44 | 47
Le débit
Le débit volumétrique théorique 𝑞𝑣𝑡ℎ fourni (pompe) ou absorbé (moteur) vaut
𝑞𝑣𝑡ℎ = 𝑛. 𝑉𝑐𝑦𝑙
, 𝑛étant la fréquence de rotation de l'arbre.
Il n'y a donc aucune relation entre le débit et la hauteur développée par la machine,
le débit est indépendant de la pression. Mais cela est l’approche toute théorique, en
réalité, les cavités, en principe hermétiques, ne le sont pas complètement. Il y a
souvent "du jeu" entre les pièces en mouvement relatif; une certaine quantité de
fluide s'écoule dans le "mauvais sens", du refoulement vers l'aspiration. C’est le débit
de fuite, il y a donc un rendement volumétrique à prendre en compte ; le débit
volumétrique réel est donc :
Pour une pompe :
𝑞𝑣 = 𝑞𝑣𝑡ℎ − 𝑞𝑣𝑓 = 𝜂𝑣𝑜𝑙 𝑛𝑉𝑐𝑦𝑙 .
𝑞𝑣 = 𝑛. (𝜂𝑣𝑜𝑙 𝑉𝑐𝑦𝑙 ) = 𝑛. 𝑉𝑐𝑟 .
La cylindrée réelle est
𝑉𝑐𝑟 = 𝜂𝑣𝑜𝑙 𝑉𝑐𝑦𝑙 , (1.77)
Pour un moteur hydraulique :
𝑞𝑣 = 𝑞𝑣𝑡ℎ + 𝑞𝑣𝑓 = 𝑛 𝑉𝑐𝑦𝑙 ⁄𝜂𝑣𝑜𝑙 .
𝑞𝑣 = 𝑛. (𝑉𝑐𝑦𝑙 ⁄𝜂𝑣𝑜𝑙 ) = 𝑛. 𝑉𝑐𝑟 ,
𝑉𝑐𝑟 = 𝑉𝑐𝑦𝑙 ⁄𝜂𝑣𝑜𝑙 , (1.78)
L'expérience montre que le débit de fuite 𝑞𝑣𝑓 est proportionnelle à la différence de
pression entre l’entrée et la sortie de la machine, ∆𝑝 = 𝑝𝑠𝑜𝑟𝑡𝑖𝑒 − 𝑝𝑒𝑛𝑡𝑟é𝑒 et inversement
proportionnelle à𝜇𝑚 , μ étant la viscosité dynamique du fluide véhiculé et m une
constante.
∆𝑝
𝑞𝑣 = 𝑞𝑣𝑡ℎ ∓ 𝐶 𝜇𝑚 , 𝑝𝑜𝑚𝑝𝑒 (1.79)
𝑑’𝑜ù
𝜇𝑚
∆𝑝 = |𝑛𝑉𝑐𝑦𝑙 − 𝑞𝑣 | 𝐶
= 𝐴𝑞𝑣 + 𝐵 (1.80)
, où𝐶 = 𝐶 𝑡𝑒 , dont la valeur dépend de la conception de la pompe ou du moteur et des
dimensions des jeux par où passent les fuites, mais ne dépend pratiquement pas de
la fréquence de rotation 𝑛et l’exposant𝑚 = 1⁄2.
La caractéristique réelle, pour, une valeur donnée de la vitesse de rotation n, est une
droite, non parallèle à l'axe des ordonnées (comme la caractéristique théorique) mais
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 45 | 47
d'autant plus voisine de cette parallèle que le fluide est plus visqueux. Ces
caractéristiques montrent que plus le débit est faible, plus∆𝑝, donc la hauteur
manométrique 𝐻 = ∆ 𝑝⁄𝜌𝑔 est élevée. L'équation,
𝐻
𝑞𝑣 = 𝑞𝑣𝑡ℎ ∓ 𝐶′ 𝜇𝑚 (1.81)
, donne une famille de droites parallèles puisque leur pente ne dépend pas de la
hauteur. Dans la pratique, les constructeurs de pompes et moteurs hydrauliques
volumétriques fournissent des courbes donnant, pour chaque hauteur𝐻, le débit en
fonction de la fréquence de rotation n.
Transition fonctionnement (𝑛1 , 𝜇1 ) vers fonctionnement (𝑛2 , 𝜇2 )
Lorsque∆𝑝 = 0, nous pouvons écrire le résultat,
𝑛
𝑞𝑣𝑡ℎ2 = 𝑛1 . 𝑞𝑣𝑡ℎ1 . (1.82)
2
En fixant la même valeur non nulle de∆𝑝, nous avons :
∆𝑝
𝑞𝑣𝑓𝑖 = 𝐶 𝜇𝑚 𝑜ù𝑖 = 1,2. (1.83)
𝑖
Ce qui nous amène à
𝜇
𝑞𝑣𝑓2 = (𝜇2 )𝑚 . 𝑞𝑣𝑓1 . (1.83)
1
Il est donc possible d’écrire simplement :
𝑛 𝜇
𝑞𝑣2 = 𝑛1 . 𝑞𝑣𝑡ℎ1 ∓ (𝜇2 )𝑚 . 𝑞𝑣𝑓1 . (1.84)
2 1
Soupape de sécurité
Pour éviter le danger de surpression, et d'éclatement en cas de baisse du débit, il
faut prévoir un dispositif de sécurité, par exemple une soupape de by-pass qui laisse
revenir une partie du liquide refoulé dans la conduite d'aspiration.
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 46 | 47
Fig. 1.20. Courbes caractéristiques d’une pompe volumétrique
Courbes utilisateurs Couple / vitesses
Pour tenir compte des pertes de charge et des pertes mécaniques, il peut être
nécessaire de disposer des courbes utilisateurs (figure ci-dessous) établies par les
essais du fabricant.
Fig. 1.21. Courbes caractéristiques d’un moteur hydraulique
STD Module-02 Pompes et moteurs hydrauliques volumétriques P a g e 47 | 47
Vous aimerez peut-être aussi
- Cours Pompes Et Station de PompageDocument55 pagesCours Pompes Et Station de PompageSylvain Didy87% (39)
- TP1. Constante Diéléctrique PDFDocument13 pagesTP1. Constante Diéléctrique PDFamine jabri100% (4)
- PI - (ROBOT SCARA Multi-Fonction)Document76 pagesPI - (ROBOT SCARA Multi-Fonction)Meriem Chiboub100% (1)
- Chapitre I - TurbomachineDocument11 pagesChapitre I - TurbomachinezinebPas encore d'évaluation
- Mme ZarzouriDocument17 pagesMme Zarzouritete200414Pas encore d'évaluation
- Leçon N°1 Généralité Sur Les Machines HydrauliquesDocument12 pagesLeçon N°1 Généralité Sur Les Machines HydrauliquesMohamed SyllaPas encore d'évaluation
- Machines Tournantes Et Statiques IDocument38 pagesMachines Tournantes Et Statiques IGottlieb Roye100% (1)
- L3 Turbomachine1 Chap2Document13 pagesL3 Turbomachine1 Chap2Hocine IKkACHEPas encore d'évaluation
- Turbomachine 1Document21 pagesTurbomachine 1Junioth BissouPas encore d'évaluation
- Chapitre 2Document21 pagesChapitre 2dhia lkPas encore d'évaluation
- Hydraulique 1Document64 pagesHydraulique 1youssef12zakaPas encore d'évaluation
- Cours Hydraulique L3 CM UsthbDocument18 pagesCours Hydraulique L3 CM UsthbHamza BellemouPas encore d'évaluation
- Pompes Centrifuge 1Document24 pagesPompes Centrifuge 1chamsou شمسوPas encore d'évaluation
- Cours de Turbomachines. Partie 1 Et 2Document9 pagesCours de Turbomachines. Partie 1 Et 2Djamel channel قناة جمالPas encore d'évaluation
- Hydraulique MADocument69 pagesHydraulique MAadder webPas encore d'évaluation
- Couplages Des Pompes Centrifuge: République Algérienne Démocratique Et PopulaireDocument11 pagesCouplages Des Pompes Centrifuge: République Algérienne Démocratique Et Populaireabdou djaPas encore d'évaluation
- La Pompe CentrifugeDocument12 pagesLa Pompe CentrifugeAfa AlgeriaPas encore d'évaluation
- Pompe HydrauliqueDocument24 pagesPompe HydrauliquesaidPas encore d'évaluation
- CI8 - C04 Schemas Hydrauliques Et Pneumatiques - v20Document4 pagesCI8 - C04 Schemas Hydrauliques Et Pneumatiques - v20moustaphajawara98Pas encore d'évaluation
- Cour 5 Hydraulique UrbaineDocument9 pagesCour 5 Hydraulique UrbainenaniPas encore d'évaluation
- 2022 Chapitre 1 Generalites Sur Les Pompe Raf 2022Document21 pages2022 Chapitre 1 Generalites Sur Les Pompe Raf 2022amine aziziPas encore d'évaluation
- IDocument2 pagesIمحمد محمدPas encore d'évaluation
- Pompe A Boue MPDocument21 pagesPompe A Boue MPفتحيPas encore d'évaluation
- SDHP Chapitre 2Document22 pagesSDHP Chapitre 2abderrahim hafiedPas encore d'évaluation
- chap.1 (1)Document7 pageschap.1 (1)adlen.messouciPas encore d'évaluation
- Pompes Et Moteurs HydrauliquesDocument7 pagesPompes Et Moteurs HydrauliquesNOufellà DoùTiiPas encore d'évaluation
- Turbo PompeDocument10 pagesTurbo PompeDZ HopePas encore d'évaluation
- Expo HydroDocument36 pagesExpo HydroArlPas encore d'évaluation
- Cicruit HydDocument22 pagesCicruit HydSITOU NATHANAELPas encore d'évaluation
- cours hydraulique cours 202Document28 pagescours hydraulique cours 202Ossama BuitaPas encore d'évaluation
- TP Turbomachines1Document12 pagesTP Turbomachines1boubadja mohamed100% (3)
- Chap 3 M1 S2Document45 pagesChap 3 M1 S2Messaoud MisoPas encore d'évaluation
- Chapitre 1 Les Circuits de Transport de LiquideDocument13 pagesChapitre 1 Les Circuits de Transport de LiquideBalloukPas encore d'évaluation
- Pumps (ACF)Document47 pagesPumps (ACF)ybouhierPas encore d'évaluation
- Chap1 EtudiantsDocument27 pagesChap1 EtudiantsWassim GarredPas encore d'évaluation
- Pompes Et MoteursDocument68 pagesPompes Et Moteursscribdassaad75% (4)
- Les PompesDocument9 pagesLes PompesMohamed EL FAGHLOUMIPas encore d'évaluation
- Chapitre 1 Thermodynamique Appliquee m1gpmDocument13 pagesChapitre 1 Thermodynamique Appliquee m1gpmNIAMPA100% (1)
- Support Cours-Turbines Hydrauliques-Prof MOUNIRDocument73 pagesSupport Cours-Turbines Hydrauliques-Prof MOUNIRIhssane IdrissiPas encore d'évaluation
- CI6 Schemas Hydrauliques Et PneumatiquesDocument4 pagesCI6 Schemas Hydrauliques Et PneumatiquesBob MinkaPas encore d'évaluation
- CourDocument110 pagesCourFATINE BOUKEBBOUPas encore d'évaluation
- Turbopompes Et Turbines Hydrauliques Cours Et TD-PR MOUNIRDocument64 pagesTurbopompes Et Turbines Hydrauliques Cours Et TD-PR MOUNIRImane Nah100% (1)
- Les PompesDocument15 pagesLes PompesMohammed Bk-r0% (1)
- PompeDocument9 pagesPompe237 Md vuesPas encore d'évaluation
- CHP 2 Hyd IndustrielleDocument8 pagesCHP 2 Hyd IndustrielleHajar OumnasPas encore d'évaluation
- 9433269Document10 pages9433269AyoubPas encore d'évaluation
- Chapitre 2 Machines HydrauliquesDocument26 pagesChapitre 2 Machines HydrauliquesAYOUB MAMAOUIPas encore d'évaluation
- INGMDocument9 pagesINGMAhmed KramdiPas encore d'évaluation
- Cours Systã Me Hydraulique - L3 AMIDocument22 pagesCours Systã Me Hydraulique - L3 AMIDivin MakitaPas encore d'évaluation
- Transmissions de Puissance Hydrostatiques: 1 - GénéralitésDocument9 pagesTransmissions de Puissance Hydrostatiques: 1 - GénéralitésNassim RabaouiPas encore d'évaluation
- TEchniques Des Pompes HydrauliquesDocument40 pagesTEchniques Des Pompes HydrauliquesJo AtiPas encore d'évaluation
- Informatique de Gestion - 2013-2014Document186 pagesInformatique de Gestion - 2013-2014badibangaisrael01Pas encore d'évaluation
- Cours Hydraulique JPLDocument55 pagesCours Hydraulique JPLbadibangaisrael01Pas encore d'évaluation
- GECAMINEDocument1 pageGECAMINEbadibangaisrael01Pas encore d'évaluation
- Analyse EDODocument45 pagesAnalyse EDOephraimPas encore d'évaluation
- Dias-Module-04-Moteurs-Alternatifs-A-Combustion-Interne - CopieDocument47 pagesDias-Module-04-Moteurs-Alternatifs-A-Combustion-Interne - Copiebadibangaisrael01Pas encore d'évaluation
- Support Du Cours Informatique de Gestion Partie01Document13 pagesSupport Du Cours Informatique de Gestion Partie01badibangaisrael01Pas encore d'évaluation
- Catalogue SaniataireDocument38 pagesCatalogue SaniataireJaouad SAYKOUKPas encore d'évaluation
- Pertes BPDocument7 pagesPertes BPmohamad.elyesPas encore d'évaluation
- Sam 11-Verification Des Poteaux 2022-V2apDocument54 pagesSam 11-Verification Des Poteaux 2022-V2apdawah1313Pas encore d'évaluation
- Série TDN°3Document4 pagesSérie TDN°3Miro A MiroPas encore d'évaluation
- Iso 17635 2016Document11 pagesIso 17635 2016manar saidiPas encore d'évaluation
- GEC 180 - Chauffage Et Climatisation PDFDocument40 pagesGEC 180 - Chauffage Et Climatisation PDFLuc AmegoloPas encore d'évaluation
- 779ga Toximetre ExplosimetreDocument6 pages779ga Toximetre Explosimetreboussad1Pas encore d'évaluation
- Exercice Conduct PDFDocument4 pagesExercice Conduct PDFkkPas encore d'évaluation
- Etude Et Optimisation de La Section de Deshydratation Du Complexe Gazier D OhanetDocument69 pagesEtude Et Optimisation de La Section de Deshydratation Du Complexe Gazier D OhanetAbde TamPas encore d'évaluation
- Caméras ThermiquesDocument6 pagesCaméras ThermiquesNabilBouabanaPas encore d'évaluation
- 7 GS (TS-GC) 15Document19 pages7 GS (TS-GC) 15Mousab AlamiPas encore d'évaluation
- RCM 4 2012 HD PDFDocument53 pagesRCM 4 2012 HD PDFaanasserPas encore d'évaluation
- WK 6000 TsDocument21 pagesWK 6000 Tsbrhanu degenePas encore d'évaluation
- Assemblage Des PiècesDocument36 pagesAssemblage Des PiècesjabePas encore d'évaluation
- COURS BETON ARME EC2 Vprovisoire Elève Ch1-2Document48 pagesCOURS BETON ARME EC2 Vprovisoire Elève Ch1-2Drissa TraorePas encore d'évaluation
- 140324-Kepler DemontreDocument6 pages140324-Kepler DemontreMOHAMED EL KHATTABIPas encore d'évaluation
- Pfe - R+9+ssol + Robot - Achour & Nessark - Bejaia 2016 PDFDocument224 pagesPfe - R+9+ssol + Robot - Achour & Nessark - Bejaia 2016 PDFOUEDRAOGO IdrissaPas encore d'évaluation
- Portance PieuxDocument16 pagesPortance PieuxClément VialardPas encore d'évaluation
- Dim Des Ea Ux Use Es E XcelDocument7 pagesDim Des Ea Ux Use Es E Xcelبكاي جلولPas encore d'évaluation
- TD1 SlciDocument1 pageTD1 Slcihamzasaad615Pas encore d'évaluation
- ProjectileDocument6 pagesProjectileLevier Poids0% (1)
- Enonce Exercice Du Chapitre 2Document2 pagesEnonce Exercice Du Chapitre 2AbelPas encore d'évaluation
- Roland Borghi - Les Milieux Continus Multiphysiques Hors D'équilibre Et Leur Modélisation-Cépaduès-Éd (2008)Document296 pagesRoland Borghi - Les Milieux Continus Multiphysiques Hors D'équilibre Et Leur Modélisation-Cépaduès-Éd (2008)Audrey AgbanglanonPas encore d'évaluation
- Chimie Appliquée Et Génie Des Procédés Industriels.: ArrivelcDocument168 pagesChimie Appliquée Et Génie Des Procédés Industriels.: ArrivelcHakimi AbderrahmanePas encore d'évaluation
- ChimieDocument412 pagesChimieKaouther JouiniPas encore d'évaluation
- Chapitre 5 - ETUDE DES MACHINES THERMIQUESDocument6 pagesChapitre 5 - ETUDE DES MACHINES THERMIQUESPapa Mbaye BaPas encore d'évaluation
- Projet Final Steg SousseDocument51 pagesProjet Final Steg Soussenadhir100% (1)
- Chapitre 6Document7 pagesChapitre 6Mohsen SaidiPas encore d'évaluation