Vous aimerez peut-être aussi
- Esoterisme - Les Cahiers de L'adepte 10, 11 Et 12Document46 pagesEsoterisme - Les Cahiers de L'adepte 10, 11 Et 12LASSIO100% (1)
- Guidage RotationDocument55 pagesGuidage RotationCharaf LeoPas encore d'évaluation
- Examen Correction L2 Probabilités 2007 2Document5 pagesExamen Correction L2 Probabilités 2007 2R-win50% (2)
- Devoir de Contrôle N°1 - Génie Électrique LECTEUR DE GLYCEMIE - Bac Technique (2015-2016) MR Lazhar KHELILDocument7 pagesDevoir de Contrôle N°1 - Génie Électrique LECTEUR DE GLYCEMIE - Bac Technique (2015-2016) MR Lazhar KHELILeya meftahPas encore d'évaluation
- Torseurs Des Liaisons NormaliseesDocument3 pagesTorseurs Des Liaisons NormaliseesmugiwaraxPas encore d'évaluation
- Statistique CoDocument4 pagesStatistique CoYves-laurent Soumelong100% (1)
- Liberee-Delivree-Let It Go - Anais Delva - Tab Guitar - 7 PagDocument7 pagesLiberee-Delivree-Let It Go - Anais Delva - Tab Guitar - 7 PagPietro ParcoPas encore d'évaluation
- Adelita - Francisco Tarrega - TabDocument1 pageAdelita - Francisco Tarrega - TabChris ChrizzlyPas encore d'évaluation
- Annexe 01 - Alphabet Grec - Annexe 02 - Trigonométrie - Annexe 03 - Coordonnées - Annexe 04 - GéométriesDocument4 pagesAnnexe 01 - Alphabet Grec - Annexe 02 - Trigonométrie - Annexe 03 - Coordonnées - Annexe 04 - GéométriesVirginie DI BENEDETTOPas encore d'évaluation
- Marleau Mc1notesDocument183 pagesMarleau Mc1notesRamdane BoulahiaPas encore d'évaluation
- Calcul Trigonometrique 2 Corrige Serie D Exercices 6 1Document1 pageCalcul Trigonometrique 2 Corrige Serie D Exercices 6 1marouane karimPas encore d'évaluation
- Angles Remarquables Du Cercle Trigonometrique Corriges D ExercicesDocument1 pageAngles Remarquables Du Cercle Trigonometrique Corriges D ExerciceswalidbaPas encore d'évaluation
- Piratas Partitura Sib 6 Miguel Quesada Violin IIDocument3 pagesPiratas Partitura Sib 6 Miguel Quesada Violin IIElba LuquePas encore d'évaluation
- Ex 2B - Angles Remarquables Du Cercle Trigonométrique - CORRIGE PDFDocument2 pagesEx 2B - Angles Remarquables Du Cercle Trigonométrique - CORRIGE PDFMoussa DembelePas encore d'évaluation
- TDset DatascheetDocument30 pagesTDset Datascheettriki abdallahPas encore d'évaluation
- Devoir Maison SenDocument4 pagesDevoir Maison Senraouf-tarik.attoumiPas encore d'évaluation
- Air Péruvien Par Cyprien N'TsaiDocument2 pagesAir Péruvien Par Cyprien N'TsaiMichel CaroPas encore d'évaluation
- Synthèse Fonction TrigonométriqueDocument4 pagesSynthèse Fonction Trigonométriquearthur.brun12Pas encore d'évaluation
- Trigo RésuméDocument2 pagesTrigo Résuméantoinetipret1Pas encore d'évaluation
- Silence AcousticDocument3 pagesSilence AcousticSelim PEKTAŞPas encore d'évaluation
- Fiche Formules TrigoDocument2 pagesFiche Formules TrigoNour El-MirPas encore d'évaluation
- JDGA106 - San Francisco - Maxime Le ForestierDocument5 pagesJDGA106 - San Francisco - Maxime Le ForestierJean-Philippe LabroussePas encore d'évaluation
- B 81 B 1 ADocument2 pagesB 81 B 1 AtorkitaherPas encore d'évaluation
- Les Ensembles de Nombres N Z Q D Et R Exercices Non Corriges 1Document1 pageLes Ensembles de Nombres N Z Q D Et R Exercices Non Corriges 1Agnaou MohamedPas encore d'évaluation
- Calogero J Ai Le Droit Aussi LyDocument1 pageCalogero J Ai Le Droit Aussi LygilouxoPas encore d'évaluation
- Chap Mod MAS - Partie 2 - Version CorrigéDocument10 pagesChap Mod MAS - Partie 2 - Version CorrigéRebiat YacinePas encore d'évaluation
- Añoralgias ArreDocument2 pagesAñoralgias ArreGera SerePas encore d'évaluation
- Pastorales de Noel (I. L'Etoile) For Clarinet, Basson and Harp - André JolivetDocument2 pagesPastorales de Noel (I. L'Etoile) For Clarinet, Basson and Harp - André JolivetSARA CHELLIPas encore d'évaluation
- A Esa Saxo A. Suple II TBNDocument1 pageA Esa Saxo A. Suple II TBNJosé Antonio Rodríguez SalvadorPas encore d'évaluation
- Skyward Sword Staff Roll - CHOIRDocument6 pagesSkyward Sword Staff Roll - CHOIRSusanPas encore d'évaluation
- DL 1 Spe MP Rs Oct.22Document8 pagesDL 1 Spe MP Rs Oct.22Ibrahim OmraniPas encore d'évaluation
- Lessons Learned From Clapton PDFDocument4 pagesLessons Learned From Clapton PDFunaxPas encore d'évaluation
- TD22 23 CorrectionDocument15 pagesTD22 23 Correctionlaarimohamedtaha1Pas encore d'évaluation
- Junto A Ti ElectricaDocument1 pageJunto A Ti ElectricaDavid Pumaricra RojasPas encore d'évaluation
- Cfao 3 CaoDocument7 pagesCfao 3 Caocasanova casanovaPas encore d'évaluation
- Blues Run The GameDocument2 pagesBlues Run The Gamechristos kriebardisPas encore d'évaluation
- BOBIDA ObjetDocument1 pageBOBIDA ObjetSadiki NabilPas encore d'évaluation
- CORRIGE Du DS Etat Stable 2-3 Etats Version 1Document2 pagesCORRIGE Du DS Etat Stable 2-3 Etats Version 1daxaeevenPas encore d'évaluation
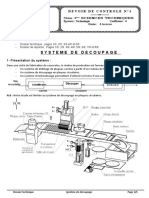
- Systeme de Decoupage: Devoir de Controle N°1Document5 pagesSysteme de Decoupage: Devoir de Controle N°1jetlaoui frajPas encore d'évaluation
- เพื่อนรักDocument5 pagesเพื่อนรัก13177natthaphumPas encore d'évaluation
- Sofia TabDocument2 pagesSofia Tabjose antonioPas encore d'évaluation
- CC1 - Calcul Des Structures 2019 - 2020Document2 pagesCC1 - Calcul Des Structures 2019 - 2020Aya ChikerPas encore d'évaluation
- Leyenda - GuitarraDocument5 pagesLeyenda - GuitarraTuna Pedro RuizPas encore d'évaluation
- Thrice - Beyond the Pines Μερος 1οDocument1 pageThrice - Beyond the Pines Μερος 1οchristos kriebardisPas encore d'évaluation
- Traverser Le Manche Avec L'arpeìge DiminueDocument1 pageTraverser Le Manche Avec L'arpeìge DiminueAYBABTU wiguiPas encore d'évaluation
- JDGA104 - La Fille Du Coupeur de Joint - HF ThiefaineDocument3 pagesJDGA104 - La Fille Du Coupeur de Joint - HF ThiefaineJean-Philippe LabroussePas encore d'évaluation
- Verin Double EffetDocument8 pagesVerin Double EffetSlaym LaarifPas encore d'évaluation
- Hangar de Stockage - Baraki Wilaya D'alger-1Document3 pagesHangar de Stockage - Baraki Wilaya D'alger-1RAHNI ALIPas encore d'évaluation
- Tank A Lait SchemaDocument1 pageTank A Lait SchemaechallierdenisPas encore d'évaluation
- File 2 Chain - 9Document1 pageFile 2 Chain - 9Ephy EphraimPas encore d'évaluation
- TD2Document6 pagesTD2SALAHEDDINE SGHIRPas encore d'évaluation
- F2 Pour RémiDocument1 pageF2 Pour RémiFelipe Silva MenaPas encore d'évaluation
- Sujet ECA If CC1 Part1Document1 pageSujet ECA If CC1 Part1Nizar El andaloussi benbrahimPas encore d'évaluation
- Noche de Luna Op 25n 4 Estudios Poeticos Daniel ForteaDocument2 pagesNoche de Luna Op 25n 4 Estudios Poeticos Daniel ForteaJoaquim MorenoPas encore d'évaluation
- La Guerra Di Piero - GuitarDocument1 pageLa Guerra Di Piero - GuitarCaterinaPas encore d'évaluation
- Stand by Me BassDocument1 pageStand by Me BassOlivier BlondelPas encore d'évaluation
- Hey JoeDocument2 pagesHey JoeZozo CocoPas encore d'évaluation
- Combinatoire CopieDocument2 pagesCombinatoire Copieabdox01kingPas encore d'évaluation
- ETUDEDocument3 pagesETUDE27. MURGA ALANOCA ALEJANDROPas encore d'évaluation
- Europa SantanaDocument1 pageEuropa SantanaDi BanjoPas encore d'évaluation
- 2.leonard Cohen - AlleluiaDocument1 page2.leonard Cohen - AlleluiaGabrielPas encore d'évaluation
- chaykovskiy - petr - ilich-swan - lake сложныйDocument3 pageschaykovskiy - petr - ilich-swan - lake сложныйcharlie1parker1_5799Pas encore d'évaluation
- Formulaire Theo Du SignalDocument7 pagesFormulaire Theo Du Signalinconito111Pas encore d'évaluation
- Fiche 13 CGDocument4 pagesFiche 13 CGAbdellah AzzouzPas encore d'évaluation
- Virginie - Lundi 24 JanvierDocument10 pagesVirginie - Lundi 24 JanvierEinigriv ZgsPas encore d'évaluation
- Broyage 2Document147 pagesBroyage 2Mounia BELAIDPas encore d'évaluation
- Poly CH 1Document15 pagesPoly CH 1NangaPas encore d'évaluation
- Visco SiteDocument77 pagesVisco SiteZAOUIPas encore d'évaluation
- 5SGUAA5Document49 pages5SGUAA5ebey_endunPas encore d'évaluation
- Fonctions Polynômes Du Second DegréDocument17 pagesFonctions Polynômes Du Second DegréZainab El AsriPas encore d'évaluation
- Devoir PratiqueDocument2 pagesDevoir PratiqueRouaissi RidhaPas encore d'évaluation
- Cours Prolog 3Document25 pagesCours Prolog 3Li liPas encore d'évaluation
- Méthode Roulette Infaillible Pour Augmenter Sa Chances de Gagner Au CasinoDocument7 pagesMéthode Roulette Infaillible Pour Augmenter Sa Chances de Gagner Au CasinoLavinYanielPas encore d'évaluation
- Commande Et Stabilite Des Systemes Lineaires Flous de Takagi-SugenoDocument6 pagesCommande Et Stabilite Des Systemes Lineaires Flous de Takagi-Sugenobadis hamhoum100% (1)
- Exercices Sur La Fonction Numérique TSExp-1-1Document13 pagesExercices Sur La Fonction Numérique TSExp-1-1kadilelenta21Pas encore d'évaluation
- Exercices D'électrostatique Avec Correction ATT1Document7 pagesExercices D'électrostatique Avec Correction ATT1Eld AyoubPas encore d'évaluation
- Limites-Continuite TD11Document7 pagesLimites-Continuite TD11Teo LolPas encore d'évaluation
- Opération 5ème ADocument18 pagesOpération 5ème AAssi FofPas encore d'évaluation
- Excel Mode D'emploiDocument12 pagesExcel Mode D'emploipirlouiti100% (1)
- F Table005 PDFDocument3 pagesF Table005 PDFmethaPas encore d'évaluation
- BTS Construction NavaleDocument2 pagesBTS Construction NavaleriadhPas encore d'évaluation
- Devoir 2Document1 pageDevoir 2ZeinPas encore d'évaluation
- Maths MIPDocument8 pagesMaths MIPfabrice MbokomPas encore d'évaluation
- Presentation Webinaire 24mai2022Document31 pagesPresentation Webinaire 24mai2022Omaima YOULAKOUPas encore d'évaluation
- Textes TPO2 ABruits DetecteursDocument91 pagesTextes TPO2 ABruits DetecteursMERIEM AFFAPas encore d'évaluation
- LCPC - CesarDocument32 pagesLCPC - Cesarthaibinhkx100% (1)
- Cours PRIMITIVES & EQUATIONS DIFFIRENTIELLES Term Spé MathDocument1 pageCours PRIMITIVES & EQUATIONS DIFFIRENTIELLES Term Spé Mathmanuel trujilloPas encore d'évaluation
- Exercice Type Bac ExponentielleDocument1 pageExercice Type Bac ExponentiellebenarabPas encore d'évaluation