Vous aimerez peut-être aussi
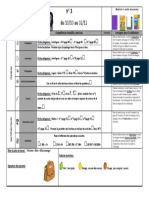
- 163-36F 2020 DepressionDocument4 pages163-36F 2020 DepressionmahfoudPas encore d'évaluation
- Rfart Aplio A450 Leaflet FRDocument2 pagesRfart Aplio A450 Leaflet FRmahfoudPas encore d'évaluation
- Fiche Technique Fiche Technique Legrand 042583 1Document2 pagesFiche Technique Fiche Technique Legrand 042583 1mahfoudPas encore d'évaluation
- Poly RaoDocument7 pagesPoly RaomahfoudPas encore d'évaluation
- Com - IDROMAT5 (06.21)Document4 pagesCom - IDROMAT5 (06.21)mahfoudPas encore d'évaluation
- Symptômes Psychotiques Dans La Démence: Hadi FAIZ, Psychiatre EMPSA 92 Nord, Île de FranceDocument45 pagesSymptômes Psychotiques Dans La Démence: Hadi FAIZ, Psychiatre EMPSA 92 Nord, Île de FrancemahfoudPas encore d'évaluation
- Conditions Générales D'utilisationDocument6 pagesConditions Générales D'utilisationmahfoudPas encore d'évaluation
- Guide Es VMDocument25 pagesGuide Es VMmahfoudPas encore d'évaluation
- Reçu de Paiement Votre Paiement A Été AcceptéDocument1 pageReçu de Paiement Votre Paiement A Été AcceptémahfoudPas encore d'évaluation
- DD Troubles Psychiques de La Personne Agee 1Document13 pagesDD Troubles Psychiques de La Personne Agee 1mahfoudPas encore d'évaluation
- Journal LeSoirDocument21 pagesJournal LeSoirmahfoudPas encore d'évaluation
- Le Management de La Force de Vente Support 2Document73 pagesLe Management de La Force de Vente Support 2Soufiane Cherif100% (1)
- Grille Bfem TroisiemeDocument5 pagesGrille Bfem Troisiemepapeefi93Pas encore d'évaluation
- E Vocabulaire GeometriqueDocument23 pagesE Vocabulaire Geometriqueadel kaisPas encore d'évaluation
- COUR DE COMPTES TOGO AUDIT Thème 1Document42 pagesCOUR DE COMPTES TOGO AUDIT Thème 1Pascal SindiePas encore d'évaluation
- Calendrier Previsionnel These 1.2Document5 pagesCalendrier Previsionnel These 1.2Wassim CharmantPas encore d'évaluation
- Dossier Complet Belles Plantes Scolaires Textes Fiches PedagogiquesDocument59 pagesDossier Complet Belles Plantes Scolaires Textes Fiches Pedagogiquesjosdiakiese950Pas encore d'évaluation
- BUDAI Erika - Les SirenesDocument9 pagesBUDAI Erika - Les SirenesHélène RichardeauPas encore d'évaluation
- Passerelle Primaire Admis 2023-2024Document6 pagesPasserelle Primaire Admis 2023-2024Chaymah ChoubouPas encore d'évaluation
- Integrer Un PDF Dans Un Site PDFDocument3 pagesIntegrer Un PDF Dans Un Site PDFlydiaberthomieuPas encore d'évaluation
- PNL - SubmodalitesDocument7 pagesPNL - SubmodalitessoriboPas encore d'évaluation
- Le Risque D'inondationDocument13 pagesLe Risque D'inondationcasaouis02Pas encore d'évaluation
- 20 Pages Part 3 - Trajectoire Decarbonation Du MarocDocument20 pages20 Pages Part 3 - Trajectoire Decarbonation Du MarocIsmail LamriniPas encore d'évaluation
- Art-Pie 1er Régiment d'Artillerie-à-Pied (Dunkerque, Calais, Boulogne)Document22 pagesArt-Pie 1er Régiment d'Artillerie-à-Pied (Dunkerque, Calais, Boulogne)DUCHAUSSOYPas encore d'évaluation
- Plan de Travail 3Document1 pagePlan de Travail 3Fabienne GillardPas encore d'évaluation
- Immunite CoursDocument14 pagesImmunite CoursJulien GhandourPas encore d'évaluation
- Le TANTRA Et Le Massage Tantrique.Document15 pagesLe TANTRA Et Le Massage Tantrique.Alexandra GalvezPas encore d'évaluation
- Les Lettres AdministrativesDocument7 pagesLes Lettres AdministrativesAyman LamzouriPas encore d'évaluation
- 37 Denombrements CorrigeDocument10 pages37 Denombrements CorrigeYassine BenabdellahPas encore d'évaluation
- 10 29000-Rumelide 817008-1366091Document19 pages10 29000-Rumelide 817008-1366091gnouna12Pas encore d'évaluation
- Adobe Illustrator CC Le Support de Cours OfficielDocument479 pagesAdobe Illustrator CC Le Support de Cours OfficielAly Bernard Ndiaye86% (7)
- 11 Technique D'expression3Document17 pages11 Technique D'expression3Imene BrbPas encore d'évaluation
- L'impact Du Choix Des FournisseursDocument9 pagesL'impact Du Choix Des FournisseursMamadou SYPas encore d'évaluation
- Architecture J2 EEDocument27 pagesArchitecture J2 EEFaiçal YahiaPas encore d'évaluation
- Examen Eoae 2 Bac Eco 2012 Session Rattrapage CorrigeDocument4 pagesExamen Eoae 2 Bac Eco 2012 Session Rattrapage CorrigeAhmed Hassan SkifaPas encore d'évaluation
- 08 Cours Travail Force Energie Mecanique MelissoDocument5 pages08 Cours Travail Force Energie Mecanique MelissoAZIAKOUPas encore d'évaluation
- 2008 Position de L'exiléDocument25 pages2008 Position de L'exilé1234Pas encore d'évaluation
- Compte-Rendu Diagnostic Et ExpertiseDocument23 pagesCompte-Rendu Diagnostic Et ExpertiseM'hamdi EzdiharPas encore d'évaluation
- Dossier Technique RéviséDocument10 pagesDossier Technique RéviséJalal Ke100% (2)
- Ces Aliments Que L'on Peut Consommer Après La Date de Péremption - Santé MagazineDocument3 pagesCes Aliments Que L'on Peut Consommer Après La Date de Péremption - Santé MagazinekiamgoPas encore d'évaluation
- Cordiérite-Mullite 1 PDFDocument10 pagesCordiérite-Mullite 1 PDFkhalidPas encore d'évaluation
- Nouveau moyen de préparer la couche sensible des plaques destinées à recevoir les images photographiques Lettre à M. AragoD'EverandNouveau moyen de préparer la couche sensible des plaques destinées à recevoir les images photographiques Lettre à M. AragoPas encore d'évaluation
- Blues Troubadour, voyage en écriture de lumière: Avec les photos de Pascal Montagne. Edition CollectorD'EverandBlues Troubadour, voyage en écriture de lumière: Avec les photos de Pascal Montagne. Edition CollectorPas encore d'évaluation
- Ô, j'ai vu!: Ma malle aux souvenirs et mon carton de photographiesD'EverandÔ, j'ai vu!: Ma malle aux souvenirs et mon carton de photographiesPas encore d'évaluation
- Tour du Monde, Maroc, ascension du Djebel Toubkal 4167 m: Passion de la photoD'EverandTour du Monde, Maroc, ascension du Djebel Toubkal 4167 m: Passion de la photoPas encore d'évaluation