Vous aimerez peut-être aussi
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Chap11 Systemes Lineaires WEBDocument28 pagesChap11 Systemes Lineaires WEBDiakitePas encore d'évaluation
- Chap11 Systemes Lineaires CMDocument91 pagesChap11 Systemes Lineaires CMYounes EL BAHRAOUIPas encore d'évaluation
- CoursDocument7 pagesCoursDABAKH LDEEBOYPas encore d'évaluation
- Fiche Cours Skema EquationsDocument8 pagesFiche Cours Skema EquationsDidier SixquartPas encore d'évaluation
- CH SyslinDocument10 pagesCH Syslinmohamed Amine TiferninePas encore d'évaluation
- CH SyslinDocument10 pagesCH SyslinAbdou YahiPas encore d'évaluation
- CH SyslinDocument10 pagesCH SyslinYounes JaaidaniPas encore d'évaluation
- 4systemes de 2 Equations A 2 Inconnues Exercices Corriges MaDocument3 pages4systemes de 2 Equations A 2 Inconnues Exercices Corriges MaBAROUD BRAHIMPas encore d'évaluation
- PDF 2Document5 pagesPDF 2beyeneandy477Pas encore d'évaluation
- Syst EquaDocument13 pagesSyst EquaNaila HananePas encore d'évaluation
- 2-Syslin SingDocument26 pages2-Syslin SingZaineb YakoubPas encore d'évaluation
- Licence SME UE19 TD4 CorrectionDocument5 pagesLicence SME UE19 TD4 CorrectionqkdjzlzkjaPas encore d'évaluation
- 17 Systemes Equations LineairesDocument4 pages17 Systemes Equations LineairesdeltafossoPas encore d'évaluation
- CHAPITRE 1 Algèbre Linéaire 1 IIADocument12 pagesCHAPITRE 1 Algèbre Linéaire 1 IIALopez KouasseuPas encore d'évaluation
- Systeme PremièreDocument3 pagesSysteme PremièrealiPas encore d'évaluation
- 05Document6 pages05أمينة أمينةPas encore d'évaluation
- Chapitre 6 Équations Inéquations SystèmesDocument9 pagesChapitre 6 Équations Inéquations SystèmesSmail RCAPas encore d'évaluation
- 02-SystemesLineaires PolyDocument9 pages02-SystemesLineaires Polyel hadji malick DioumPas encore d'évaluation
- Systemes de Deux Equations A Deux InconnuesDocument16 pagesSystemes de Deux Equations A Deux InconnueszlimitounePas encore d'évaluation
- Syslinch 2Document24 pagesSyslinch 2imranelalami1Pas encore d'évaluation
- M Coundoul Lycee PassyDocument76 pagesM Coundoul Lycee PassyNaty DiagnePas encore d'évaluation
- Chap1 Diallo AlgebreDocument8 pagesChap1 Diallo Algebrebassiroudabo370Pas encore d'évaluation
- Série 3 LSG AlgèbreDocument3 pagesSérie 3 LSG Algèbrezara jijiPas encore d'évaluation
- AL7MA04TEPA0013 Sequence 04 PDFDocument41 pagesAL7MA04TEPA0013 Sequence 04 PDFPepePas encore d'évaluation
- Equations Systemes D'equationsDocument15 pagesEquations Systemes D'equationsEdel MacPas encore d'évaluation
- Xavi Page28Document1 pageXavi Page28GuissePas encore d'évaluation
- Exo - Synthese AlgebreDocument22 pagesExo - Synthese AlgebreKamelia BedadPas encore d'évaluation
- EQUA Système D'équationDocument2 pagesEQUA Système D'équationRazarasoa ManahiranaPas encore d'évaluation
- TA Maths Leçon 07 Systèmes LinéairesDocument10 pagesTA Maths Leçon 07 Systèmes Linéairesevrardlouis45Pas encore d'évaluation
- TD Corrigés MATHS PDFDocument44 pagesTD Corrigés MATHS PDFSirine ZediraPas encore d'évaluation
- Exercices - Equations DiffrentiellesDocument16 pagesExercices - Equations DiffrentiellesMahamane Hamissou Salissou Elhadji YahayaPas encore d'évaluation
- Cours Equations Inequations Et Systemes 3Document34 pagesCours Equations Inequations Et Systemes 3Pina Spk100% (1)
- 1 Mathematiques Equations S3A3CDocument7 pages1 Mathematiques Equations S3A3CSerena LevasseurPas encore d'évaluation
- Fiche Pedagogique Les Systemes D Equations 105005Document7 pagesFiche Pedagogique Les Systemes D Equations 105005سكينة بلقاسميPas encore d'évaluation
- Beamer SystèmeDocument36 pagesBeamer SystèmeDavidPas encore d'évaluation
- 1CD-geometrie Analytique PDFDocument54 pages1CD-geometrie Analytique PDFFrancoChoqueMontalvoPas encore d'évaluation
- Systèmes LinéairesDocument16 pagesSystèmes Linéaireska.Pas encore d'évaluation
- Droites PDFDocument4 pagesDroites PDFzataraPas encore d'évaluation
- Chapitre 4 - Systèmes D'équations LinéairesDocument9 pagesChapitre 4 - Systèmes D'équations LinéairesArij ChouchenePas encore d'évaluation
- 3 Systlin S2PeiPDocument10 pages3 Systlin S2PeiPalioune ndiayePas encore d'évaluation
- Tcs Seri1 Sys CorDocument12 pagesTcs Seri1 Sys CorMoustakimPas encore d'évaluation
- Partiel 2021 CorrDocument2 pagesPartiel 2021 Corrhitomi SuzunaPas encore d'évaluation
- 14-b Problèmes de Bts-ChimieDocument20 pages14-b Problèmes de Bts-ChimielvtmathPas encore d'évaluation
- 3è-Maths-12 Equations Et Inéquations Dans RXR D200522Document15 pages3è-Maths-12 Equations Et Inéquations Dans RXR D200522KONAN ABO PHILEMON ARONOUPas encore d'évaluation
- Lecons 1ère L2 A-2Document31 pagesLecons 1ère L2 A-2Maurice GomisPas encore d'évaluation
- M 103 TD4 CorrigeDocument24 pagesM 103 TD4 Corrigeguy taghoPas encore d'évaluation
- Chapitre 1. Systèmes D'équationsDocument4 pagesChapitre 1. Systèmes D'équationsFaycel HIZIPas encore d'évaluation
- Resolution Systemes EquationsDocument8 pagesResolution Systemes EquationsAymane HammouchPas encore d'évaluation
- 2-Systéme LinéaireDocument26 pages2-Systéme LinéaireoscarPas encore d'évaluation
- Systemes Lineaires Nov09 PDFDocument28 pagesSystemes Lineaires Nov09 PDFleah terrsaPas encore d'évaluation
- Série 5 Equa-DiffDocument1 pageSérie 5 Equa-Diffmedmm200430Pas encore d'évaluation
- Maths 2C - L11 - Equation Et Inequation Dans IR PDFDocument7 pagesMaths 2C - L11 - Equation Et Inequation Dans IR PDFChakpelba Sãhba Aristide Chak'sarisPas encore d'évaluation
- Quelques Exercices Donnés Les Années Passées en DS PGCD BEZOUT GAUSSDocument2 pagesQuelques Exercices Donnés Les Années Passées en DS PGCD BEZOUT GAUSSdaxaeevenPas encore d'évaluation
- Alg 2Document33 pagesAlg 2Kilgrave100% (1)
- CCP MP 2019 Maths 2 CorrigeDocument5 pagesCCP MP 2019 Maths 2 CorrigeAnowar SaleinePas encore d'évaluation
- Chapitre 9 Equation Droite Systeme EquationsDocument9 pagesChapitre 9 Equation Droite Systeme EquationsLouis DefunesiPas encore d'évaluation
- Equationsexponentielles EXOSCORRIGESDocument3 pagesEquationsexponentielles EXOSCORRIGESVasanthkumar DjeacoumaranePas encore d'évaluation
- Systemes de Deux EquationsDocument2 pagesSystemes de Deux Equationsneji abdelkarimPas encore d'évaluation
- devoir-algebre-CERPAMAD-l1 2024Document2 pagesdevoir-algebre-CERPAMAD-l1 2024alexnikiema08Pas encore d'évaluation
- Berklee College - Fingering Patterns Guitar PDFDocument5 pagesBerklee College - Fingering Patterns Guitar PDFDouglas Marques100% (1)
- Le Théorème de FermatDocument12 pagesLe Théorème de FermatAlae sayPas encore d'évaluation
- Comment Surveiller L Integrite de Votre SystemeDocument3 pagesComment Surveiller L Integrite de Votre SystemekezsoloPas encore d'évaluation
- A Primitivist Primer FR ENDocument11 pagesA Primitivist Primer FR ENkezsoloPas encore d'évaluation
- Le Secteur de DemarrageDocument1 pageLe Secteur de DemarragekezsoloPas encore d'évaluation
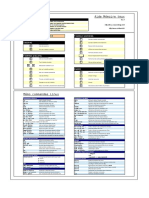
- Git AntisecheDocument4 pagesGit AntisechekezsoloPas encore d'évaluation
- Libre Comme Dans LiberteDocument132 pagesLibre Comme Dans LibertekezsoloPas encore d'évaluation
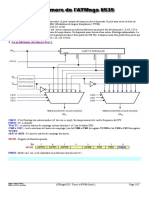
- Les Timers de L.ATMega 8535Document17 pagesLes Timers de L.ATMega 8535kezsoloPas encore d'évaluation
- Masterclass YvinecDocument1 pageMasterclass YvineckezsoloPas encore d'évaluation
- Cours CryptanalyseDocument17 pagesCours CryptanalysekezsoloPas encore d'évaluation
- La Carte A PuceDocument132 pagesLa Carte A PucekezsoloPas encore d'évaluation
- Adn PresentationDocument2 pagesAdn PresentationkezsoloPas encore d'évaluation
- Arduino - Bus I2C FRDocument7 pagesArduino - Bus I2C FRkezsoloPas encore d'évaluation
- Tmux Linux v1.0Document1 pageTmux Linux v1.0kezsoloPas encore d'évaluation
- Section RythmiqueDocument1 pageSection RythmiquekezsoloPas encore d'évaluation
- RythmeDocument1 pageRythmekezsoloPas encore d'évaluation
- TD2 AnalyseDocument2 pagesTD2 AnalyseMouadh OunissiPas encore d'évaluation
- correctionTD2 IMP PDFDocument3 pagescorrectionTD2 IMP PDFMed Amine Talhaoui50% (2)
- 9-Valeurs Propres Et Vecteurs PropresDocument12 pages9-Valeurs Propres Et Vecteurs PropresSamagassi Souleymane100% (1)
- C3. Papier Cifa S-Procédure Et D U - Stabilité RobusteDocument6 pagesC3. Papier Cifa S-Procédure Et D U - Stabilité RobusteAmineBilal SidSariPas encore d'évaluation
- Analyse VectoDocument5 pagesAnalyse Vectoghiouane100% (1)
- 10-Valeurs Et Vecteurs Propres+diagonalisation - GIDocument6 pages10-Valeurs Et Vecteurs Propres+diagonalisation - GIAnouar BelabbesPas encore d'évaluation
- Algèbre3 Réduction1Document43 pagesAlgèbre3 Réduction1yassine faradiPas encore d'évaluation
- Prod Vect MixteDocument16 pagesProd Vect Mixtebouchaib12345Pas encore d'évaluation
- Séance 1 de TP - Matlab - Avec - CorrigésDocument11 pagesSéance 1 de TP - Matlab - Avec - CorrigésAya DouhouPas encore d'évaluation
- Mécanisme Fin 5Document78 pagesMécanisme Fin 5akarne YounessPas encore d'évaluation
- Exercice 2 Corrigée MQ2 SMP5 UCD PDFDocument1 pageExercice 2 Corrigée MQ2 SMP5 UCD PDFHAJIR KHALIDPas encore d'évaluation
- 7.-Corrige Colle07 Reduction Endo PrehilbertDocument5 pages7.-Corrige Colle07 Reduction Endo PrehilbertPeuitoPas encore d'évaluation
- Théorie Et Traitement Du Signal, Tome 2 - Cours Et Exercices Corrigés (PDFDrive)Document279 pagesThéorie Et Traitement Du Signal, Tome 2 - Cours Et Exercices Corrigés (PDFDrive)Hamid MarjiPas encore d'évaluation
- Lien Entre Les EDS Et Les EDP Du 10 Au 14 Mai 2020 PDFDocument4 pagesLien Entre Les EDS Et Les EDP Du 10 Au 14 Mai 2020 PDFBEAUTY & STYLE with houniPas encore d'évaluation
- Algèbre 2 Examen 03Document1 pageAlgèbre 2 Examen 03PhanaPas encore d'évaluation
- Liens Entre Fonction de Transfert Et Représentations D'état D'un Système PDFDocument26 pagesLiens Entre Fonction de Transfert Et Représentations D'état D'un Système PDFTran Cuong HungPas encore d'évaluation
- Topologie Et Calcul Diff - Poly - Partie 2Document25 pagesTopologie Et Calcul Diff - Poly - Partie 2jeanPas encore d'évaluation
- VecteursDocument14 pagesVecteursbcmdata bcmdataPas encore d'évaluation
- Algebre Lineaire PDFDocument162 pagesAlgebre Lineaire PDFHicham33100% (1)
- M205: Algèbre BilinéaireDocument69 pagesM205: Algèbre BilinéaireClément Boulonne100% (1)
- Cours Robotique 834Document24 pagesCours Robotique 834AZEDDINEPas encore d'évaluation
- CCP MP 2005 - Math 2 Dur Ee: 4 Heures Calculatrices InterditesDocument4 pagesCCP MP 2005 - Math 2 Dur Ee: 4 Heures Calculatrices Interditesapi-3762501Pas encore d'évaluation
- Formation MATLABDocument19 pagesFormation MATLABabdellah romaniPas encore d'évaluation
- Fondements de La PLDocument48 pagesFondements de La PLAnes KebbabPas encore d'évaluation
- TD - 3 - Elements Corrige DeformationDocument6 pagesTD - 3 - Elements Corrige DeformationAmao PapaoPas encore d'évaluation
- Examen Final Alg4 15-16Document4 pagesExamen Final Alg4 15-16Wissem BentPas encore d'évaluation
- CH Calcul DiffDocument18 pagesCH Calcul DiffChota ChrifPas encore d'évaluation
- Notes de Cours Les VecteursDocument30 pagesNotes de Cours Les VecteursGurlInpinkPas encore d'évaluation
- Espaces Vectoriels Normes Cours CompletDocument17 pagesEspaces Vectoriels Normes Cours Completadnane beniaoufPas encore d'évaluation
- Portique Dans L'espace - Partie 01Document6 pagesPortique Dans L'espace - Partie 01Manel DriciPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Je me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?D'EverandJe me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?Évaluation : 4 sur 5 étoiles4/5 (1)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Mathématiques et Mathématiciens Pensées et CuriositésD'EverandMathématiques et Mathématiciens Pensées et CuriositésÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013D'EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Pas encore d'évaluation
- Les 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonD'EverandLes 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonPas encore d'évaluation
- Signe pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FranceD'EverandSigne pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FrancePas encore d'évaluation
- Le must bilingue™ du lycéen Vol. 2 - les maths en anglaisD'EverandLe must bilingue™ du lycéen Vol. 2 - les maths en anglaisPas encore d'évaluation