Vous aimerez peut-être aussi
- ABC Letter Tracing for Preschoolers: French Handwriting Practice Workbook for KidsD'EverandABC Letter Tracing for Preschoolers: French Handwriting Practice Workbook for KidsPas encore d'évaluation
- TP Penetrometrique Laboratoire MateriauxDocument6 pagesTP Penetrometrique Laboratoire MateriauxSaid Benkassab100% (2)
- FR LQ Nissens Ac System Diagnostics Poster 98x68 Operating Pressures R134aDocument1 pageFR LQ Nissens Ac System Diagnostics Poster 98x68 Operating Pressures R134aSebastien Saluden100% (3)
- Manuel Moteur LombardiniDocument74 pagesManuel Moteur LombardiniHicham Ouakil0% (1)
- RUCF - Nouv - FR - 23Document6 pagesRUCF - Nouv - FR - 23allardPas encore d'évaluation
- DOCRUCF Nouv FR 11 PDFDocument6 pagesDOCRUCF Nouv FR 11 PDFYAHIAOUIPas encore d'évaluation
- Mini Projet Energie Renouvelable (12!03!2021)Document4 pagesMini Projet Energie Renouvelable (12!03!2021)Zim ZimPas encore d'évaluation
- Mini Projet Energie Renouvelable (12-03 - 2021)Document4 pagesMini Projet Energie Renouvelable (12-03 - 2021)Zim ZimPas encore d'évaluation
- Drag 2 Refresh Edition User ManualDocument1 pageDrag 2 Refresh Edition User ManualhendrawindessyPas encore d'évaluation
- Al924a 024384400 1058 05052011Document1 pageAl924a 024384400 1058 05052011mahaPas encore d'évaluation
- FR J03.500.c19 TH HRC70 ManuelDocument4 pagesFR J03.500.c19 TH HRC70 ManuelFabrice PisanPas encore d'évaluation
- Control Rca 5 DigitosDocument2 pagesControl Rca 5 DigitosRoderick Lenhardt FontanPas encore d'évaluation
- Manuel de Reparations LGW 523-627Document94 pagesManuel de Reparations LGW 523-627MussardPas encore d'évaluation
- 1-Principes Generaux de CorrectionDocument15 pages1-Principes Generaux de CorrectionMed MaxPas encore d'évaluation
- Chronis RTSDocument2 pagesChronis RTSnivu niconnnu59Pas encore d'évaluation
- Chapitre7 Travail EnergieDocument12 pagesChapitre7 Travail EnergieAstrid OlartePas encore d'évaluation
- LM ArmDocument27 pagesLM ArmMis DoSomePas encore d'évaluation
- O184738v101 Highlightflyer MC100i EVO FRDocument2 pagesO184738v101 Highlightflyer MC100i EVO FRphdum23Pas encore d'évaluation
- Act3e - Chap 8 - Facture ÉlectricitéDocument1 pageAct3e - Chap 8 - Facture ÉlectricitéKarine WitvitzkyPas encore d'évaluation
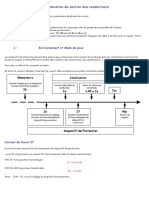
- Détermination de Section Des ConducteursDocument9 pagesDétermination de Section Des ConducteursmohamedhriziPas encore d'évaluation
- Zoin SandyDocument4 pagesZoin SandynomacoolPas encore d'évaluation
- OMRON - E5CN UserManualDocument252 pagesOMRON - E5CN UserManualQkrypterPas encore d'évaluation
- Etat de Sortie V8Document1 pageEtat de Sortie V8Hadrien RichardPas encore d'évaluation
- Mareno Kitchen Anc Ant Star 70 90 Series Io Manual Cr0580700 201710Document98 pagesMareno Kitchen Anc Ant Star 70 90 Series Io Manual Cr0580700 201710fivos06Pas encore d'évaluation
- 4eme Exercice Conversion Continuite Pedagogique Semaine 3 - 3 - 2Document2 pages4eme Exercice Conversion Continuite Pedagogique Semaine 3 - 3 - 2Papa NDIAYEPas encore d'évaluation
- IndexDocument2 pagesIndexELMIR ADILPas encore d'évaluation
- Fiche Technique InterrupteurDocument2 pagesFiche Technique InterrupteurcompaoreazizthierryPas encore d'évaluation
- Chapitre1 WORDDocument5 pagesChapitre1 WORDmaryam sidquiPas encore d'évaluation
- Bergerac - SDIS - 2023-02-28-ST05 - Ind.0 Coupes Et Détails 2s2Document1 pageBergerac - SDIS - 2023-02-28-ST05 - Ind.0 Coupes Et Détails 2s2louis.jailletPas encore d'évaluation
- Cours4 TomographieDocument55 pagesCours4 TomographieLionel DahePas encore d'évaluation
- GTK AdaDocument29 pagesGTK Adajeabarretgmail.comPas encore d'évaluation
- 12 Wa600 - 20-801 T PDFDocument34 pages12 Wa600 - 20-801 T PDFNacer NacerPas encore d'évaluation
- PID CoursDocument5 pagesPID CoursNdolo KamerPas encore d'évaluation
- 10781333Document10 pages10781333Iancu ConstantinPas encore d'évaluation
- Analyse Numérique (L2S4 / PSI) Sujet de Travaux Pratiques No 1Document3 pagesAnalyse Numérique (L2S4 / PSI) Sujet de Travaux Pratiques No 1raissirachid8Pas encore d'évaluation
- Grundfosliterature 6510817Document2 pagesGrundfosliterature 6510817Aurelien KinetPas encore d'évaluation
- Reseau - Exploitation HTADocument21 pagesReseau - Exploitation HTAYassine El HidaouiPas encore d'évaluation
- TD OclDocument2 pagesTD OclYOUSSEF SIYAHPas encore d'évaluation
- Corrigé Chapitre 7-1 Analyser Le FonctionnementDocument6 pagesCorrigé Chapitre 7-1 Analyser Le FonctionnementEmma RoemerPas encore d'évaluation
- Cours Monde3D 2017 08-NormalMappingDocument15 pagesCours Monde3D 2017 08-NormalMappingimedPas encore d'évaluation
- Canevas de Plan D'affairesDocument17 pagesCanevas de Plan D'affairesAbdoulaye Boua BERTHEPas encore d'évaluation
- 1-5KVA Manuel D - Utilisation PDFDocument40 pages1-5KVA Manuel D - Utilisation PDFRoyal Louembet100% (2)
- Moteur Lombardini FocsDocument82 pagesMoteur Lombardini FocsPhilippe GillionPas encore d'évaluation
- Compteur de Débit de Gaz Avec A Cheur Amovible:: DN19, 600,800 SLPMDocument3 pagesCompteur de Débit de Gaz Avec A Cheur Amovible:: DN19, 600,800 SLPMbertrandPas encore d'évaluation
- Exemple BPDocument40 pagesExemple BPSanogo BoubaPas encore d'évaluation
- Synotics of High Current DistributionDocument1 pageSynotics of High Current DistributionSOROPas encore d'évaluation
- Manuel Radio Sony RXP-x300Document2 pagesManuel Radio Sony RXP-x300vjdvqpqs8qPas encore d'évaluation
- Packb Macx MCR 1ts I Olp SP 1213841 Ia 01Document9 pagesPackb Macx MCR 1ts I Olp SP 1213841 Ia 01xhaneriPas encore d'évaluation
- Commandes GITDocument1 pageCommandes GITNadir RhaziPas encore d'évaluation
- Fonctions Python Fiche RecapDocument3 pagesFonctions Python Fiche RecapFadel WissalPas encore d'évaluation
- Examen TPDocument1 pageExamen TPmaryam bouharratPas encore d'évaluation
- Exercices FusiblesDocument3 pagesExercices FusiblesezzidinePas encore d'évaluation
- Istruzioni Maniglioni CISA Fast Fast TouchDocument2 pagesIstruzioni Maniglioni CISA Fast Fast TouchIusPas encore d'évaluation
- TSA 2018-chp1-KEDIRDocument24 pagesTSA 2018-chp1-KEDIRIlyas KendouciPas encore d'évaluation
- Telcoma StoneDocument100 pagesTelcoma StoneDaniel EnachePas encore d'évaluation
- FAME Black Eyed Peas: La Biographie Des Black Eyed PeasD'EverandFAME Black Eyed Peas: La Biographie Des Black Eyed PeasPas encore d'évaluation
- Chapitre 9 - Liaison Serie RS232Document77 pagesChapitre 9 - Liaison Serie RS232the.diable.tristrePas encore d'évaluation
- Sony Projector Service Manual VPL-ES2 VPL-CS7Document98 pagesSony Projector Service Manual VPL-ES2 VPL-CS7Fisher GrubbPas encore d'évaluation
- Maintenance Du Logiciel HellodocDocument6 pagesMaintenance Du Logiciel HellodocMarek LewandowskiPas encore d'évaluation
- 4SI - Les Fichiers - ÉlèveDocument6 pages4SI - Les Fichiers - Élèvenaoufel charfeddine100% (2)
- APL2Document21 pagesAPL2crista972Pas encore d'évaluation
- Sujet TD1Document2 pagesSujet TD1YAKRAMO DIVINEPas encore d'évaluation
- TP 1 Réseau Lan Partie 1 + LienDocument19 pagesTP 1 Réseau Lan Partie 1 + LienMohamed HamritPas encore d'évaluation
- Transmission Analogique: Rapport Du Travaux Pratiques - TP N°1 - Multiplieur Analogique Et ApplicationsDocument6 pagesTransmission Analogique: Rapport Du Travaux Pratiques - TP N°1 - Multiplieur Analogique Et ApplicationsOmar BufteemPas encore d'évaluation
- Elm 327 Probléme EcuDocument7 pagesElm 327 Probléme EcusomdpPas encore d'évaluation
- Sécurité Des Terminaux Guide de L'acheteurDocument14 pagesSécurité Des Terminaux Guide de L'acheteurDieunel MapembiPas encore d'évaluation
- SMA - S4 - Info4 Serie 1 TD TP ELOUDGHIRIDocument1 pageSMA - S4 - Info4 Serie 1 TD TP ELOUDGHIRIOussama AzPas encore d'évaluation
- TP6 Langage de Programmation CDocument2 pagesTP6 Langage de Programmation CHamza BouzammitPas encore d'évaluation
- AD Cours 1 - Introduction Aux ADDocument30 pagesAD Cours 1 - Introduction Aux ADtilimsani143Pas encore d'évaluation
- Epreuve E42 Bts Elec 2019 Elements de CorrectionDocument16 pagesEpreuve E42 Bts Elec 2019 Elements de CorrectionOlivier FLOHRPas encore d'évaluation
- Uml IntroductionDocument45 pagesUml Introductionapi-3734442100% (2)
- Cours Ar Av 5Document23 pagesCours Ar Av 5Mahdi LahdiliPas encore d'évaluation
- Msi Z270 Xpower Gaming Titanium PDFDocument248 pagesMsi Z270 Xpower Gaming Titanium PDFLuis Picon AragonPas encore d'évaluation
- Documentation Zero ShellDocument7 pagesDocumentation Zero ShellMaximaint DjanPas encore d'évaluation
- PYTHON1Document10 pagesPYTHON1reda bensakhri 44a ditPas encore d'évaluation
- CM5 - Rupture de SéquencesDocument37 pagesCM5 - Rupture de Séquencesfazfrito lacaviataPas encore d'évaluation
- 0 BEN RABAA Mars 2018Document10 pages0 BEN RABAA Mars 2018Rayen FekihPas encore d'évaluation
- Débutant Java - System - Out.printDocument8 pagesDébutant Java - System - Out.printdibakidiPas encore d'évaluation
- Installation de CentOS 6Document13 pagesInstallation de CentOS 6balalouPas encore d'évaluation
- Chapitre3: Grafcet Et Langage de Programmation D'un API: 1. GrafcetDocument8 pagesChapitre3: Grafcet Et Langage de Programmation D'un API: 1. Grafcetoumaima nasri100% (1)
- Adobe Acrobat - Recherche GoogleDocument1 pageAdobe Acrobat - Recherche GoogleSAM WILKENPas encore d'évaluation
- QCM Iot n3 EleveDocument2 pagesQCM Iot n3 EleveromarickoutonsouPas encore d'évaluation
- Hipath 3000 ManDocument1 220 pagesHipath 3000 ManbentamraPas encore d'évaluation
- ACSI v2Document151 pagesACSI v2Widad JakjoudPas encore d'évaluation
- TP01Document8 pagesTP01Me RePas encore d'évaluation
- Prise en Main Eagle 9.5-v1Document44 pagesPrise en Main Eagle 9.5-v1Yanick SombonPas encore d'évaluation