Académique Documents
Professionnel Documents
Culture Documents
Cinema Ti Que
Transféré par
Sofieno JobranCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Cinema Ti Que
Transféré par
Sofieno JobranDroits d'auteur :
Formats disponibles
Mcanique du point matriel
CINMATIQUE
Jimmy ROUSSEL - ENSCR
Rsum
Cette che de cours aborde la cinmatique cest--dire la science du mouvement sans sintresser aux causes du mou-
vement. Il sagit l de poser les diffrentes faons de dcrire le mouvement, de dnir les grandeurs dvolution que
sont la vitesse et lacclration et enn de traiter le changement de rfrentiel dobservation.
Prrequis : Calcul vectoriel, systme de coordonnes et courbes paramtriques. Je suggre la lecture des
ches OMP - Systmes de coordonnes & Courbes paramtriques et OMP - Calcul vectoriel
1 Espace et temps
1.1 Lespace
Lexprience montre que le mouvement possde un caractre essentiellement relatif. En dautres termes, on
ne peut pas dire quun corps est en mouvement (ou au repos ) sans prciser par rapport quoi. Pour
dcrire le mouvement il est donc ncessaire de prciser un systme daxes qui nous permette de reprer
la position dun point : cest le repre despace constitu de trois axes orients munis dune origine O
(arbitraire) et dune chelle spatiale permettant de reprer dans lexpace trois dimensions nimporte quel
point. Nous pouvons alors mesurer la distance entre deux points ainsi que lorientation de nimporte quel
axe. Ce reprage ncessite de dnir une unit de longueur : le mtre du Systme International.
Dnition : Ltalon mtre
Le mtre a connu en deux sicles quatre dnitions successives : dabord li un sys-
tme suppos invariable, la longueur du mridien terrestre (1795), le mtre devient en
1889 associ au prototype international, talon matriel particulier en platine iridi ;
les progrs de la spectroscopie et de la physique quantique conduisent retenir en
1960 un multiple de la longueur donde dune radiation rsonante sur une transition
dans latome de krypton. En 1983, la dnition du mtre change une dernire fois. Il
est dsormais tabli partir du phnomne de propagation de la lumire dans le vide.
La distance parcourue par la lumire dans le vide pendant 1 seconde vaut, par
dnition du mtre,
L = 299792458m
Ltalon mtre est donc reli ltalon seconde.
Remarque : Initialement, le mtre tait dni partir de la longueur du mridien ter-
restre : L =40000km. Aujourdhui, avec ltalon mtre actuel (li ltalon seconde)
L = 40008, 08km; la diffrence est donc imperceptible pour les utilisateurs courants.
1
1.2 Le temps 2
1.2 Le temps
Nous avons galement besoin de dnir une chronologie des vnements et donc dun repre temporel :
il sagit dun axe orient indiquant le sens dcoulement du temps munie dune origine arbitraire (t=0) et
dune chelle des temps donne par une horloge. La mesure des dures ncessite une unit de temps : la
seconde du Systme International.
Dnition : Ltalon seconde
La seconde est aujourdhui ralise avec une exactitude relative de 10
14
, laide
dune horloge atomique, matrialisant la priode de transition dans latome de c-
sium :
La seconde est la dure de 9192631770 priodes de la radiation correspondante
la transition entre les deux niveaux hyperns de latome
133
Cs.
Remarque : Initialement la seconde tait dnie partir du jour solaire moyen J par
la relation J = 86400s. Aujourdhui, avec la dnition de ltalon seconde, on a J =
86400, 003s.
Pour dcrire le mouvement dun corps matriel il est ncessaire de prciser par rapport quel repre
despace on fait les mesures de distance et par rapport quel horloge on mesure le temps. Le repre despace
associ un repre temporel forme un Rfrentiel. Parler dun mouvement sans dnir le rfrentiel na
aucun sens !
1.3 Postulats newtoniens
En mcanique newtonienne, on fait deux hypothses importantes :
1. Isochronisme des horloges : le temps est considr comme absolu. Autrement dit il y a invariance de
la dure par changement de rfrentiel.
2. Lespace est suppos trois dimensions, euclidien (obissant la gomtrie dEuclide), homogne
et isotrope. Cet espace est absolu et ces proprits sont indpendantes de la matire qui sy trouve.
Histoire :
Au 20me sicle, trois thories ont boulevers la physique classique et ont remis en
causes les concepts newtoniens :
La thorie de la Relativit Restreinte invente par A. EINSTEIN en 1905 conduit
abandonner lhypothse disochronisme des horloges. Lcoulement du temps
dpend du rfrentiel. Il ny a plus de temps absolu.
La thorie de la Relativit Gnrale invente par A. EINSTEIN en 1917 est une
thorie relativiste de la gravitation. Cette thorie remet en cause lide dun espace
euclidien inerte et indpendant de son contenu matriel.
Enn, dans les annes 20, la Mcanique Quantique thorie qui cherche dcrire
correctement le monde atomique, remet en cause la notion mme de trajectoire !
2 Description du mouvement
2.1 quation horaire
Considrons un point matriel M dcrivant une trajectoire au cours de son mouvement par rapport un
rfrentiel R. Lquation horaire est lquation qui permet de reprer le point M chaque instant. Il
existe plusieurs faons de rprer le point M au cours du temps t :
c Jimmy Roussel - http ://perso.ensc-rennes.fr/jimmy.roussel
2.2 Vecteur vitesse 3
Soit on dnit le vecteur position
r =
OM(t) chaque instant dans un systme de coordonnes. On
obtient alors lquation paramtrique dune courbe C en fonction dun paramtre qui est prcisment le
temps.
Soit - si la trajectoire est connue - on utilise la distance curviligne s(t). La distance curviligne est une me-
sure algbrique de la distance darc
M
0
M(t) le long de la trajectoire, M
0
tant un point origine arbitraire
sur la trajectoire.
Exemple
Considrons un point M dcrivant un mouvement plan dans un rfrentiel
R(0,
u
x
,
u
y
) dquation paramtrique cartsienne :
C
1
x(t) = Rcost
y(t) = Rsint
t [0, 2[
avec une constante. Il sagit dune courbe ferme puisque x(0) =x(2/) et y(0) =
y(2/). Remarquons que x(t)
2
+y(t)
2
=R
2
t ce qui signie que M dcrit un cercle
de centre O et de rayon R. Il sagit l dune trajectoire circulaire uniforme dcrit la
frquence f =
2
.
On pourrait aussi dcrire cette trajectoire dans une autre systme de coordonnes, par
exemple dans le systme de coordonnes polaires (r, ). On crirait :
C
1
r(t) = R
(t) = t
t [0, 2[
On pourrait enn dnir la position du point M partir de labscisse curviligne la
trajectoire tant connue : M dcrit un cercle de rayon R et de centre O dans le sens
anti-horaire tel que s(t) =
M
0
M(t) = Rt avec M
0
= (R, 0).
2.2 Vecteur vitesse
c Jimmy Roussel - http ://perso.ensc-rennes.fr/jimmy.roussel
2.2 Vecteur vitesse 4
Dnition
On appelle vecteur vitesse instantane du point M par rapport au rfrentiel R le
vecteur
v(t) = lim
t0
OM(t +t)
OM(t)
t
=
d
OM
dt
R
(t)
La norme de la vitesse se mesure en [m.s
1
].
Le vecteur vitesse tant la drive du vecteur position, il en rsulte que le vecteur
vitesse est tangent la trajectoire.
Insistons sur le fait que la vitesse est une notion relative un rfrentiel dobservation. Une fois le rf-
rentiel choisi, la vitesse dun point ne prend quune valeur un instant t. Cependant il existe diffrentes
faons de lexprimer puisque lon peut choisir diffrentes bases de projection. Dans tous les cas, la norme
de la vitesse ne dpend pas de la base choisie. Le choix de la base est en gnral guid par la symtrie du
problme. Voyons comment la vitesse sexprime dans diffrentes bases.
Base cartsienne : Les composantes de la vitesse sont simplement les drives temporelles des coordon-
nes de M (on note x =
dx
dt
etc...)
OM =
x(t)
y(t)
z(t)
,
v (t) =
x(t) = v
x
y(t) = v
y
z(t) = v
z
Base cylndrique (r, , z) : le vecteur position, exprim dans la base mobile scrit :
OM = r(t)
u
r
+z(t)
u
z
Pour obtenir la vitesse il faut driver notamment le vecteur unitaire
u
r
par rapport au temps. Nous verrons
dans le chapitre suivant comment driver un vecteur unitaire. Pour linstant il est pratique dobtenir la
vitesse laide du dplacement lmentaire qui scrit ici
dl = dr
u
r
+rd
+dz
u
z
.
v =
dl
dt
= r
+r
+ z
u
z
Base sphrique (r, , ) : le vecteur position, exprim dans la base mobile scrit :
OM = r(t)
u
r
et le dplacement lmentaire scrit
dl = dr
u
r
+rd
+r sind
ce qui permet dobtenir la vitesse
en coordonnes sphriques
v = r
+r
+r sin
u
z
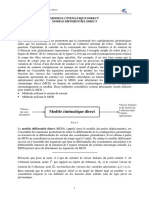
Base de Frenet : Le repre de Frenet a pour origine le point M(t) et pour base un tridre orthonorm direct
(
n ,
b ). Cette base mobile est telle qu chaque instant
est tangent la trajectoire et dirig dans le
sens positif,
n est perpendiculaire la trajectoire et orient vers le centre du cercle localement tangent
la trajectoire (cercle osculateur) ; enn
b forme avec les deux autres vecteurs un tridre direct. La vitesse
tant tangente la trajectoire, on a
v = v
. La norme de la vitesse scrit v =
dl
dt
=
ds
dt
. Ainsi on crira
dans la base de Frenet
v =
ds
dt
Remarques :
c Jimmy Roussel - http ://perso.ensc-rennes.fr/jimmy.roussel
2.3 Vecteur acclration 5
T
r
a
je
c
to
ir
e N
v
a
R
Centre de courbure
T
Cercle osculateur
Fig. 1: Repre de Frenet.
1. Lorsque la valeur algbrique de la vitesse est constante, on dit que le mouvement est uniforme. Dans
ce cas, labscisse curviligne scrit s(t) = vt +s(0).
2. De faon gnrale, la norme de la vitesse v =
_
_
_
d
OM
dt
_
_
_ =
dOM
dt
. Par exemple, un point M en mouvement
circulaire de centre O est tel que OM = constante et v = 0.
3. Quand il est important de prciser dans quel rfrentiel on travaille, il est courant de rencontrer la
notation
v
M/R
(t) pour la vitesse dun point par rapport un rfrentiel R.
2.3 Vecteur acclration
Dnition
On appelle vecteur acclration instantane du point M par rapport au rfrentiel R
le vecteur
a(t) = lim
t0
v (t +t)
v (t)
t
=
d
v
dt
(t) =
d
2
OM
dt
2
R
(t)
La norme de lacclration se mesure en [m.s
2
].
Lexpression de lacclration sobtient donc en drivant la vitesse. Donnons lexpression de lacclration
dans la base cartsienne et dans la base de Frenet ; nous verrons plus loin comment obtenir lacclration
dans nimporte quelle base.
Base cartsienne : Les vecteurs unitaires tant xes, il suft de driver les composantes de la vitesse (on
note x =
d
2
x
dt
2
etc...)
v (t) =
x(t) = v
x
y(t) = v
y
z(t) = v
z
a (t) =
x(t) = a
x
y(t) = a
y
z(t) = a
z
Base de Frenet : Nous avons vu que la vitesse sexprimait comme la drive de labscisse curviligne
suivant la tangente la trajectoire. Le vecteur acclration (voir annexe pour la dmonstration) possde
une composante tangentielle et une composante normale :
a =
dv
dt
(t)
+
v
2
n
c Jimmy Roussel - http ://perso.ensc-rennes.fr/jimmy.roussel
2.4 Quelques mouvements simples 6
o dsigne le rayon de courbure de la trajectoire au point M considr. On voit donc que lacclration
tangentielle
dv
dt
(t) mesure laugmentation de vitesse alors que lacclration normale
v
2
est lie la courbure
de la trajectoire.
Remarquons que le produit scalaire
v .
a = v
dv
dt
=
1
2
dv
2
dt
. Ainsi
v .
a > 0 mouvement acclr
v .
a < 0 mouvement ralenti
Remarques :
La formule de Frenet nous dit que la norme de lacclration scrit a =
_
dv
dt
_
2
+
v
2
2
et donc, en
gnral a =
_
_
_
_
d
v
dt
_
_
_
_
=
dv
dt
!
2.4 Quelques mouvements simples
Le mouvement rectiligne
Considrons un point Mdcrivant un mouvement sur une droite et appelons s(t) =
OM labscisse curviligne
par rapport un point O de la droite. On a - daprs les formules de Frenet -
v (t) =
ds
dt
a (t) =
d
2
s
dt
2
Vitesse et acclration sont dirigs suivant la trajectoire. On peut distinguer deux cas simples :
mouvement rectiligne uniforme : la vitesse v est constante, lacclration est nulle et lquation horaire
scrit
s(t) = vt +s(0)
mouvement rectiligne uniformment acclr : lacclration est constante
a =
C
te
ds
dt
= v = at +v
0
s(t) =
1
2
at
2
+v
0
t +s
0
o v
0
et s
0
sont respectivement la vitesse et labscisse curviligne linstant t = 0. Remarquons que pour
un mouvement rectiligne uniformment acclr on a, entre deux instants t
1
et t
2
:
v
2
2
v
2
1
= 2a(s
2
s
1
)
Mouvement circulaire
Considrons un point M dcrivant une trajectoire circulaire de rayon R et de centre O. Si lon appelle (t)
langle que fait (OM) avec (OM
0
), alors labscisse curviligne scrit s(t) =
M
0
M(t) =R(t) do la vitesse
v (t) = R
o =
(t) dsigne la vitesse angulaire de rotation (en rad.s
1
). On notera que la vitesse peut aussi
scrire :
v =
OM
o O est un point de laxe de rotation et
=
u avec
u le vecteur unitaire associ laxe de rotation
par la rgle du tire-bouchon. Lacclration scrit grce la formule de Frenet
a (t) = R
d
dt
+R
2
n
c Jimmy Roussel - http ://perso.ensc-rennes.fr/jimmy.roussel
7
Mouvement circulaire uniforme
Dans ce cas le cercle est dcrit vitesse constante et donc vitesse angulaire constante. Langle augmente
alors linairement avec le temps = t +
0
. Ainsi le point M fait un tour au bout dune dure constante
appele priode
T =
2
et le nombre de tours effectus en 1 seconde sappelle la frquence et se mesure en Hertz en hommage
Heinrich HERTZ
1
(Symbole Hz) :
f =
1
T
=
2
Enn lacclration est centripte cest--dire dirig vers le centre du cercle :
a (t) = R
2
n .
3 Changements de rfrentiel - composition du mouvement
3.1 Mouvement dun rfrentiel par rapport un autre
Considrons un rfrentiel R de systme daxes (O,
u
1
,
u
2
,
u
3
) que lon appellera rfrentiel absolu
et un autre rfrentiel R
de systme daxes (O
1
,
2
,
3
) que lon appellera rfrentiel relatif . Nous
cherchons caractriser le mouvement de R
par rapport R. Le mouvement gnral de R
par rapport
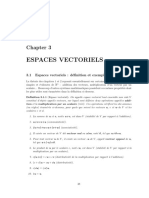
R se dcompose en deux mouvements types :
V(o) O
R
O
R
(a) Translation rectiligne
R
O
R
O
R
V(o)
O
R
O
(b) Translation circulaire
Fig. 2: Mouvements de translation.
Le mouvement de translation : R
est en translation par rapport R si et seulement si les vecteurs
k=1..3
conservent la mme direction et le mme sens au cours du temps, par rapport tout observateur
li R. Dans ce cas on a :
d
k=1..3
dt
R
=
0
Si O dcrit une droite, on parle alors de translation rectiligne.
Si O dcrit un cercle, on parle de translation circulaire (grande roue dune foire).
Si O dcrit une courbe quelconque, on parle de translation curviligne.
1. Heinrich Hertz est n Hambourg en Allemagne (1857-1894). Physicien clbre pour avoir russi la premire mission et
rception dondes radio en 1887, sur une distance de 20 mtres donnant du mme coup une preuve de la validit de la thorie
lectromagntique de Maxwell. Dans les milieux scientiques, il est considr comme le dcouvreur de la radio. Cest la raison pour
laquelle on a donn le nom d ondes hertziennes aux signaux radio et pourquoi lunit de la frquence vibratoires quon appelait
cycles au dpart, a t remplace par Hertz .
c Jimmy Roussel - http ://perso.ensc-rennes.fr/jimmy.roussel
3.2 Formule de drivation vectorielle 8
(t)
(R/R)
e
R
O
R
O
Fig. 3: Mouvement de rotation par rapport un axe.
Le mouvement de rotation : Dans ce cas
d
k=1..3
dt
R
=
0 . Supposons R
en rotation par rapport R
autour dun axe xe port par
u
3
. Lextrmit du vecteur
u
1
ou
u
2
dcrit alors un cercle de centre O
et de rayon unit. La vitesse de lextrmit du vecteur
1
ou
2
scrit donc :
d
1
dt
R
= 1
d
dt
2
d
2
dt
R
= 1
d
dt
1
d
3
dt
R
=
0
o dsigne langle de rotation autour de laxe. On dnit le vecteur rotation instantan de R
par
rapport R - not
(R
/R) - le vecteur dirig suivant laxe orient par (rgle du tire-bouchon) et de
norme la vitesse angulaire (t) = :
(R
/R) = (t)
3
Les relations ci dessus se rsument ainsi :
d
k
dt
(R
/R)
k
k = 1, 2, 3
Cest la dnition gnrale du vecteur rotation instantan.
Ainsi dans le cas gnral, le mouvement dun rfrentiel par rapport un autre est la composition dune
translation et dune rotation. Notez que le vecteur rotation peut varier en norme (rotation xe avec une
vitesse angulaire variable) mais aussi en direction (laxe nest alors plus xe).
3.2 Formule de drivation vectorielle
Considrons un vecteur
A (t) dont la norme et/ou lorientation dpend du temps. Un observateur li au
rfrentiel R voit voluer cette grandeur dune certaine faon alors quun autre observateur li un autre
rfrentiel R
la voit voluer autrement. La formule de drivation vectorielle relie les variations de
A (t)
que voient ces deux observateurs. On montre que (voir annexe pour la dmonstration) :
c Jimmy Roussel - http ://perso.ensc-rennes.fr/jimmy.roussel
3.2 Formule de drivation vectorielle 9
d
A
dt
R
=
d
A
dt
(R
/R)
A
Drive dun vecteur unitaire mobile
Considrons un vecteur unitaire
u
(t), vecteur xe dans R
et calculons
d
dt
R
. Un observateur li
R
observant
u
ne verrait varier ni sa norme (elle vaut 1) ni son orientation ce qui permet dcrire
d
dt
0 . Ainsi, daprs la formule de drivation vectorielle on obtient
d
dt
R
=
(R
/R)
pour tout vecteur unitaire xe dans R
. Cette formule permet de calculer les vitesses et les acclrations
dans dautres systmes de coordonnes.
c Jimmy Roussel - http ://perso.ensc-rennes.fr/jimmy.roussel
3.2 Formule de drivation vectorielle 10
Exemple 1 Vitesse et acclration en coordonnes polaires
Considrons le rfrentiel R(0,
u
x
,
u
y
,
u
z
) et le rfrentiel R
(O,
u
r
,
u
z
). Par rap-
port R, R
est en rotation autour de laxe Oz et le vecteur rotation instantane vaut
(R
/R) =
u
z
Ainsi
d
u
r
dt
R
=
u
z
u
r
=
dt
R
=
u
z
u
r
Ces drives obtenues, il est aise dobtenir la vitesse dun point du plan (xOy) dans
la base polaire mobile. En effet, on a
OM = r
u
r
(t)
d
OM
dt
R
= r
u
r
+r
Si lon drive nouveau nous obtenons
d
2
OM
dt
2
R
= ( r r
2
)
u
r
+(2 r
+r
)
Analysons un instant cette formule :
si r = R = constante, on obtient
d
2
OM
dt
2
R
=R
u
r
+R
. On retrouve lacc-
lration dun mouvement circulaire.
si = constante, on obtient
d
2
OM
dt
2
R
= r
u
r
. On retrouve lacclration dun mou-
vement rectiligne suivant une ligne radiale.
c Jimmy Roussel - http ://perso.ensc-rennes.fr/jimmy.roussel
3.3 Loi de composition des vitesses 11
Exemple 2 Mouvement sur une sphre.
Considrons un point M astreint se dplacer sur une sphre de centre O et de rayon
R, xe dans le rfrentiel R(0,
u
x
,
u
y
,
u
z
). M est repr laide des deux angles (t)
et (t) du systme de coordonnes sphriques. On a
OM = R
u
r
d
OM
dt
R
= R
d
u
r
dt
R
Le systme daxes du systme sphrique tourne avec un vecteur rotation
u
z
. Donc,
d
u
r
dt
R
=
u
r
=
+ sin
dt
R
=
u
r
+ cos
dt
R
=
= sin
u
r
cos
On retrouve donc la formule donnant la vitesse
v = R
+Rsin
En drivant une fois de plus, on obtient lacclration du point M :
a
M/R
= R
+ R
u
r
+ cos
_
+ Rcos
+ Rsin
+
Rsin ( sin
u
r
cos
) cest--dire, aprs simplication
a
M/R
=R
2
+
2
sin
2
u
r
+
sin cos
2
+
_
2cos
+sin
_
3.3 Loi de composition des vitesses
Considrons un point matriel M en mouvement dans le rfrentiel absolu R. Nous cherchons re-
lier ce mouvement avec le mouvement vu dans un autre rfrentiel R
(appel improprement rfrentiel
relatif ). On dnit :
La vitesse absolue de M comme tant la vitesse du point M par rapport au rfrentiel R. On notera cette
vitesse
V
a
(M) =
d
OM
dt
R
.
La vitesse relative de M comme tant la vitesse du point M par rapport au rfrentiel R
. On notera cette
vitesse
V
r
(M) =
d
M
dt
.
Cas gnral
c Jimmy Roussel - http ://perso.ensc-rennes.fr/jimmy.roussel
3.3 Loi de composition des vitesses 12
En drivant le vecteur position laide de la formule de drivation vectorielle, on montre (voir dmonstra-
tion en annexe) la loi de composition des vitesses suivante
V
M/R
. .
=
V
M/R
. .
+
V
M
/R
. .
V
a
(M)
V
r
(M)
V
e
(M)
V
e
(M) dsigne la vitesse dentranement cest--dire la vitesse dun point M
xe dans R
et qui concide
avec M linstant t (point concidant).
1er cas particuliers : rfrentiels en translation
Supposons que le rfrentiel R
soit en translation par rapport R. On note
V (O
) la vitesse de translation
de R
par rapport au rfrentiel R.
V(o) O
R
O
R
Ici si lon xe le point M dans R
, il sera entran par R
la vitesse de translation de R
. Autrement dit,
la vitesse dentranement est prcisment la vitesse de translation. Donc la loi de composition des vitesses
scrit :
V
M/R
. .
=
V
M/R
. .
+
V (O
)
. .
V
a
(M)
V
r
(M)
V
e
(M)
c Jimmy Roussel - http ://perso.ensc-rennes.fr/jimmy.roussel
3.4 Loi de composition des acclrations 13
Exemple
Considrons un hlicoptre se dplaant horizontalement en ligne droite la vitesse
V. Les pales de lhlicoptre, de longueur L tournent la vitesse angulaire . On d-
nit deux rfrentiels : R(O,
u
x
,
u
y
) et R
(A,
u
x
,
u
y
) le rfrentiel li lhlicoptre.
Calculons la vitesse absolue dun point M situ lextrmit dune pale.
Le rfrentiel R
est en translation par rapport R la vitesse V
u
x
. On a donc :
V
M/R
=
V
M/R
+V
u
x
Il nous reste exprimer la vitesse relative. Or le mouvement du point M par rap-
port au rfrentiel li lhlicoptre est un mouvement circulaire uniforme de vitesse
angulaire de centre A et de rayon L. On a donc
V
M/R
= L
Ainsi il nous reste exprimer le vecteur vitesse dans une base orthonorme directe
(plus commode). Si lon choisit la base cartsienne on a :
V
M/R
= (V Lsin)
u
x
+Lcos
u
y
2me cas particuliers : rfrentiels en rotation
Suppossons maintenant que le rfrentiel R
soit en rotation autour dun axe xe () par rapport R. On
note
le vecteur rotation instantan et on place O en O.
Cherchons la vitesse dentranement en imaginant que le point M est xe linstant t dans R
. Dans ce cas,
il dcrit - par entranement - un mouvement circulaire de centre H, le projet orthogonal de M sur laxe de
rotation , de rayon HM et de vitesse angulaire . Dans ce cas, la vitesse dentranement scrit
HM.
V
M/R
. .
=
V
M/R
. .
+
HM
. .
V
a
(M)
V
r
(M)
V
e
(M)
3.4 Loi de composition des acclrations
On dnit
a
a
(M) =
d
2
OM
dt
2
R
, lacclration absolue du point M par rapport au rfrentiel absolu .
a
r
(M) =
d
2
M
dt
2
, lacclration du point M par rapport au rfrentiel relatif .
Cas gnral
c Jimmy Roussel - http ://perso.ensc-rennes.fr/jimmy.roussel
3.4 Loi de composition des acclrations 14
En drivant le vecteur vitesse laide de la formule de drivation vectorielle, on montre (voir dmonstration
en annexe) la loi de composition des acclrations suivante
a
M/R
=
a
M/R
+
a
M
/R
+ 2
V
r
(M)
a
a
(M) =
a
r
(M)+
a
e
(M)+
a
c
(M)
a
e
(M) dsigne l acclration dentranement cest--dire lacclration dun point M
xe dans R
et
qui concide avec M linstant t (point concidant).
a
c
(M) = 2
V
r
(M) reprsente lacclration de CORIOLIS.
Remarque : En gnral,
a
e
(M) =
d
V
e
(M)
dt
R
.
1er cas particuliers : rfrentiels en translation
On a vu que, dans ce cas, le mouvement dentranement tait un mouvement rectiligne de vitesse
V (O
) et
donc dacclration
a
e
(M) =
a (O
) =
d
2
OO
dt
2
. De plus, le rfrentiel R
tant en translation par rapport
R, on a
(R
/R) =
0 ; lacclration de Coriolis est donc nulle.
d
V
a
(M)
dt
R
=
d
V
r
(M)
dt
+
d
2
OO
dt
2
R
Exemple
Reprenons lexemple de lhlicoptre se dplaant horizontalement en ligne droite
la vitesse uniforme V. Dans ce cas lacclration dentrainement est nulle car V est
constant. Lacclration absolue sidentie donc lacclration relative. Comme le
mouvement relatif est circulaire uniforme, lacclration est centripte dirig vers le
centre de courbure, -savoir le point A. On a donc :
a
M/R
=L
2
u
r
2me cas particuliers : rfrentiels en rotation uniforme
Suppossons maintenant que le rfrentiel R
soit en rotation uniforme autour dun axe xe () par rapport
R. On note
le vecteur rotation instantan et on place O en O.
On a vu que le mouvement dentranement tait un mouvement de circulaire de centre H, le projet or-
thogonal de M sur laxe de rotation , de rayon HM et de vitesse angulaire . Dans ce cas, lacclra-
tion est centripte (mouvement circulaire uniforme) dirige de M vers H et de norme HM
2
. On a donc
a
e
=
2
HM. Ainsi, dans ce cas particulier on a
d
V
a
(M)
dt
R
=
d
V
r
(M)
dt
HM+2
V
r
(M)
c Jimmy Roussel - http ://perso.ensc-rennes.fr/jimmy.roussel
15
A Formule de drivation vectorielle.
d
A
dt
R
=
d
A
dt
(R
/R)
A
Dmonstration. Dans R
, on peut crire :
A = A
1
1
+A
2
2
+A
3
3
Donc :
d
A
dt
R
=
dA
1
dt
1
+
dA
2
dt
2
+
dA
3
dt
3
. .
+A
1
d
1
dt
+A
2
d
2
dt
+A
3
d
3
dt
d
A
dt
Or par dnition du vecteur rotation instantane
(R
/R)(t), on a :
d
k
dt
R
=
(R
/R)
k
k = 1, 2, 3
Ainsi on obtient
d
A
dt
R
=
d
A
dt
(R
/R)
A
B Acclration dans le tridre de Frenet
a =
dv
dt
(t)
+
v
2
n
Dmonstration. Considrons un point M dcrivant une trajectoire dans le rfrentiel R(O,
u
x
,
u
y
,
u
z
). Ap-
pelons R
(M,
n ,
b ) le rfrentiel li au point M et sa trajectoire (rfrentiel de Frenet). Nous avons
dj vu que la vitesse sexprimait en fonction de labscisse curviligne s(t) :
v
M/R
=
ds
dt
Lacclration du point M dans le rfrentiel R vaut alors :
a
M/R
=
d
2
s
dt
2
+
ds
dt
d
dt
R
Or, daprs la formule de drivation vectorielle on a
d
dt
R
=
(R
/R)
c Jimmy Roussel - http ://perso.ensc-rennes.fr/jimmy.roussel
16
On peut relier le vecteur rotation labscisse curviligne et au rayon de courbure du cercle osculateur. En
effet, pendant la dure dt, les axes du tridre de Frenet tournent dun angle dt tel que dt = ds. Laxe
de rotation est orient, par dnition,du cercle osculateur, suivant
b
d
dt
R
=
1
ds
dt
=
1
ds
dt
n
Ainsi, on obtient :
a
M/R
=
d
2
s
dt
2
+
1
ds
dt
n
C Loi de composition des vitesses
V
M/R
. .
=
V
M/R
. .
+
V
M/R
. .
V
a
(M)
V
r
(M)
V
e
(M)
Avec M
le point xe dans
qui linstant t, concide avec M (point concidant).
Dmonstration. A laide de la formule de drivation vectorielle, on a
V
a
(M) =
d
OM
dt
R
=
d
M
dt
+
d
OO
dt
R
+
M
Le premier terme sidentie la vitesse relative de M par rapport au rfrentiel R
, note
V
r
(M). Si lon
contraint le point M tre xe linstant t dans R
, la vitesse sidentie alors aux deux derniers termes
qui reprsentent donc la vitesse dentranement de M lie au dplacement (translation et/ou rotation) de
R
/R. Cette vitesse est note
V
e
(M).
D Loi de composition des acclrations.
a
M/R
=
a
M/R
+
a
M
/R
+ 2
V
r
(M)
a
a
(M) =
a
r
(M)+
a
e
(M)+
a
c
(M)
Dmonstration. Drivons la formule de composition des vitesses en utilisant la formule de drivation vec-
torielle :
d
V
a
(M)
dt
R
=
d
V
r
(M)
dt
V
r
(M) +
d
2
OO
dt
2
R
+
d
dt
M+
V
r
(M) +
M
_
c Jimmy Roussel - http ://perso.ensc-rennes.fr/jimmy.roussel
17
expression qui se simplie si lon pose
M =
H +
HM avec H le projet orthogonal de M sur laxe de
rotation instantan. En effet, le vecteur rotation tant, par dnition, colinaire
H, on obtient
M
_
=
HM
HM
HM =
2
e
HM
d
V
a
(M)
dt
R
. .
=
d
V
r
(M)
dt
. .
+ 2.
V
r
(M)
. .
+
d
2
OO
dt
2
R
+
d
dt
M
2
HM
. .
a
a
(M)
a
r
(M)
a
c
(M)
a
e
(M)
a
a
(M) reprsente lacclration absolue du point M par rapport au rfrentiel absolu.
a
r
(M) reprsente lacclration du point M par rapport au rfrentiel relatif.
a
c
(M) reprsente lacclration de CORIOLIS.
a
c
(M) = 2.
V
r
(M)
Les trois derniers termes reprsentent lacclration du point concidant M
, cest--dire lacclration
dentranement
a
e
(M). En effet si M = M
, lacclration relative et de CORIOLIS sannulent.
c Jimmy Roussel - http ://perso.ensc-rennes.fr/jimmy.roussel
Vous aimerez peut-être aussi
- TD1 SolDocument16 pagesTD1 SolZINEB KAABACHEPas encore d'évaluation
- TD2 Math 22017Document4 pagesTD2 Math 22017Seyf ZiadiPas encore d'évaluation
- Memoire Bon2Document125 pagesMemoire Bon2monssa diouf100% (3)
- Exercices MEF PDFDocument3 pagesExercices MEF PDFgehikaw67% (3)
- ChainesFermees CoursDocument7 pagesChainesFermees CoursMouhcine Ben MoussaPas encore d'évaluation
- Chap1 Diagonalisation Des Matrices PDFDocument8 pagesChap1 Diagonalisation Des Matrices PDFBOUPas encore d'évaluation
- CH 6 Spécialité Equations Diffã©rentiellesDocument5 pagesCH 6 Spécialité Equations Diffã©rentiellesmaximequentin0630Pas encore d'évaluation
- Chapitre 3 Espaces de HilbertDocument5 pagesChapitre 3 Espaces de Hilbertمارية حسنينPas encore d'évaluation
- Vrai Ou Faux de Vecteur PropreDocument6 pagesVrai Ou Faux de Vecteur PropredzererPas encore d'évaluation
- Polycopie - 2022Document112 pagesPolycopie - 2022Sonia SelmiPas encore d'évaluation
- Redresseur MLI Triphasé de TensionDocument28 pagesRedresseur MLI Triphasé de TensionStar Souf100% (8)
- Caen C Sept 1980Document2 pagesCaen C Sept 1980Junior AkobaraPas encore d'évaluation
- Produit ScalaireDocument8 pagesProduit Scalairezlimitoune100% (1)
- Torseurs: I. DéfinitionsDocument53 pagesTorseurs: I. DéfinitionsMeryem JabranePas encore d'évaluation
- Module 06 Connaissance Des Mathématiques-BTP-TCCTPDocument98 pagesModule 06 Connaissance Des Mathématiques-BTP-TCCTPHamza HalhouliPas encore d'évaluation
- Ccppsi 2016 1 SujetDocument8 pagesCcppsi 2016 1 SujetLeila EljanyaniPas encore d'évaluation
- Cour Analyse VectorielleDocument18 pagesCour Analyse VectorielleSee HawaPas encore d'évaluation
- BLPC 219 53-67Document15 pagesBLPC 219 53-67khadimPas encore d'évaluation
- Modèle Cinématique DirectDocument7 pagesModèle Cinématique DirectsiamPas encore d'évaluation
- 06.nombres ComplexesDocument28 pages06.nombres ComplexesΚαμαλ ελ βαδιϱPas encore d'évaluation
- INP Meca TDDocument41 pagesINP Meca TDHassan HallaouaPas encore d'évaluation
- CFAO - Modélisation de Courbes Et SurfacesDocument20 pagesCFAO - Modélisation de Courbes Et SurfacesZakariae Zâamoun100% (1)
- M 5 Aschap 12Document36 pagesM 5 Aschap 12Cheikhna MohamedPas encore d'évaluation
- Chapitre 3Document13 pagesChapitre 3Shakespeare RahmaPas encore d'évaluation
- Corrigé Exercice 1:: Manège Spin FlyDocument8 pagesCorrigé Exercice 1:: Manège Spin FlyFiras HamidPas encore d'évaluation
- Cours Optim M1SAFDocument65 pagesCours Optim M1SAFHamouda AzzouzPas encore d'évaluation
- Calcul Differentiel Et EqDocument22 pagesCalcul Differentiel Et EqAnonymous MNQ6iZ50% (2)
- Integrales de SurfaceDocument28 pagesIntegrales de Surfacebouchaib12345Pas encore d'évaluation
- RésuméMRUDocument2 pagesRésuméMRUvijayanthonyPas encore d'évaluation
- Modélisation GéométriqueDocument16 pagesModélisation GéométriqueAissa HadjoudjaPas encore d'évaluation