Vous aimerez peut-être aussi
- PDB Thermo 40 FR V01Document2 pagesPDB Thermo 40 FR V01adem nejmaPas encore d'évaluation
- Fiche - Technique BAESDocument22 pagesFiche - Technique BAESadem nejmaPas encore d'évaluation
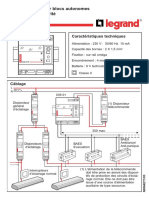
- Caractéristiques Techniques: LegrandDocument4 pagesCaractéristiques Techniques: Legrandadem nejmaPas encore d'évaluation
- Tag Brochure 2022 FR v1Document2 pagesTag Brochure 2022 FR v1adem nejmaPas encore d'évaluation
- ELE-DWG-001 - Schema Unifilaire - Situation Actuelle-PhaseDocument1 pageELE-DWG-001 - Schema Unifilaire - Situation Actuelle-Phaseadem nejmaPas encore d'évaluation
- PAR-220733-PM-LT-001-00 - Liste Des Documents-CommentairesDocument2 pagesPAR-220733-PM-LT-001-00 - Liste Des Documents-Commentairesadem nejmaPas encore d'évaluation
- DEV-220 - 733-PM-PN-0018 - Directeur Commenté ANDocument1 pageDEV-220 - 733-PM-PN-0018 - Directeur Commenté ANadem nejmaPas encore d'évaluation
- 2370 Section 7Document6 pages2370 Section 7adem nejmaPas encore d'évaluation
- INTEC - Spécifications TechniquesDocument4 pagesINTEC - Spécifications Techniquesadem nejmaPas encore d'évaluation
- MRQT 2Document2 pagesMRQT 2adem nejmaPas encore d'évaluation
- Rapport 5Document5 pagesRapport 5adem nejmaPas encore d'évaluation
- Rhoc Ibit Ee08 3sel01 00Document2 pagesRhoc Ibit Ee08 3sel01 00adem nejmaPas encore d'évaluation
- Lot 2 - Spec TechniDocument3 pagesLot 2 - Spec Techniadem nejmaPas encore d'évaluation
- Arteliea 1Document3 pagesArteliea 1adem nejmaPas encore d'évaluation
- Etude de Faisabilite - 223Document4 pagesEtude de Faisabilite - 223adem nejmaPas encore d'évaluation
- Rapport 4Document5 pagesRapport 4adem nejmaPas encore d'évaluation
- MRT 2370 Section 7 - Lot 2 - Spécifications Techniques - CopieDocument21 pagesMRT 2370 Section 7 - Lot 2 - Spécifications Techniques - Copieadem nejmaPas encore d'évaluation
- Etude de Faisabilite HatchDocument402 pagesEtude de Faisabilite Hatchadem nejmaPas encore d'évaluation
- Etude de FaisabiliteDocument12 pagesEtude de Faisabiliteadem nejmaPas encore d'évaluation
- Exercises LoadFlow F V2Document4 pagesExercises LoadFlow F V2adem nejmaPas encore d'évaluation
- Spécification Technique Des Poteaux MétalliquesDocument1 pageSpécification Technique Des Poteaux Métalliquesadem nejmaPas encore d'évaluation
- Rapport 3Document5 pagesRapport 3adem nejmaPas encore d'évaluation
- Le But de Cette Épreuve Est de Déterminer Si Un Seul Feutre Effaceur Suffit Pour Effacer Le Contenu D'une Petite Cartouche D'encre BleueDocument4 pagesLe But de Cette Épreuve Est de Déterminer Si Un Seul Feutre Effaceur Suffit Pour Effacer Le Contenu D'une Petite Cartouche D'encre BleuePrescillia DieziaPas encore d'évaluation
- Fiche JavascriptDocument5 pagesFiche JavascriptA'ch RéfPas encore d'évaluation
- 06.0165 - Chambre D'essai Sous Vide (Avec Vaccuometre) - 2Document1 page06.0165 - Chambre D'essai Sous Vide (Avec Vaccuometre) - 2Ghilles PoloPas encore d'évaluation
- TP SemaphoresDocument2 pagesTP Semaphoresعضوش محمدPas encore d'évaluation
- TD RefrigerateurDocument4 pagesTD RefrigerateurAmine BenjamiaPas encore d'évaluation
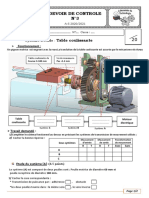
- Devoir de Controle N°3: Table CoulissanteDocument2 pagesDevoir de Controle N°3: Table CoulissanteTarekMostapha100% (1)
- UntitledDocument3 pagesUntitledyeheph yehephPas encore d'évaluation
- Poinçonnement: LIM SovanvichetDocument13 pagesPoinçonnement: LIM SovanvichetPhal KhemraPas encore d'évaluation
- Maths 4-TD2Document3 pagesMaths 4-TD2bmessaad1970Pas encore d'évaluation
- cryptographie ٠٩٤٠٤٦Document67 pagescryptographie ٠٩٤٠٤٦Amina BenhassinePas encore d'évaluation
- Sunbeam Bread Maker 5891Document44 pagesSunbeam Bread Maker 5891fwoomPas encore d'évaluation
- Détection D'anomalies D'un Réseau Mobile MEGHERBI KHALEFDocument27 pagesDétection D'anomalies D'un Réseau Mobile MEGHERBI KHALEFminiya1703Pas encore d'évaluation
- TP6 Complx 2018-2019Document2 pagesTP6 Complx 2018-2019Hadjer KaddourPas encore d'évaluation
- Exercice 1Document2 pagesExercice 1Nour elhoudaPas encore d'évaluation
- Scomazzon Pasal SMZ926Document225 pagesScomazzon Pasal SMZ926hiriPas encore d'évaluation
- Hydrologie Statistique PDFDocument153 pagesHydrologie Statistique PDFAhlam RA100% (1)
- Ex Ef PotenceDocument10 pagesEx Ef PotenceChafik BouguezourPas encore d'évaluation
- Tp1 BI-PythonDocument3 pagesTp1 BI-PythonHiba AmaraPas encore d'évaluation
- MedafDocument42 pagesMedafYesmine JasminePas encore d'évaluation
- Ficha 7.0702 31 Honda Civic TypeR GroupeA FN2Document20 pagesFicha 7.0702 31 Honda Civic TypeR GroupeA FN2HugoPas encore d'évaluation
- C4 CdmaDocument20 pagesC4 CdmaF Nass BenPas encore d'évaluation
- Fopc 0720916e 4241Document4 pagesFopc 0720916e 4241Cyrielle DomguePas encore d'évaluation
- RadjaZahia ZoutatAziza SilakhelYaminaDocument78 pagesRadjaZahia ZoutatAziza SilakhelYaminaLamia BekehchiPas encore d'évaluation
- TP Api IiDocument11 pagesTP Api IiAdem AounPas encore d'évaluation
- Brochure Tech 2017 Techn Info Tournai 24pDocument28 pagesBrochure Tech 2017 Techn Info Tournai 24pDayang DayangPas encore d'évaluation
- Serie MichelsonDocument8 pagesSerie MichelsonMD HM BCPas encore d'évaluation
- Ece 19 SVT 01 V1Document2 pagesEce 19 SVT 01 V1AlexPas encore d'évaluation
- l3 tm1 Chapitre1 Lecon 01Document10 pagesl3 tm1 Chapitre1 Lecon 01Fatima LagnaouiPas encore d'évaluation
- Cours - Pic 16f628a PDFDocument11 pagesCours - Pic 16f628a PDFridofoxPas encore d'évaluation
- Doctorat BelhouchetDocument184 pagesDoctorat Belhouchetfootball goalPas encore d'évaluation
- The Physics of Wall Street: A Brief History of Predicting the UnpredictableD'EverandThe Physics of Wall Street: A Brief History of Predicting the UnpredictableÉvaluation : 4 sur 5 étoiles4/5 (5)
- Advanced Production Decline Analysis and ApplicationD'EverandAdvanced Production Decline Analysis and ApplicationÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Mathematical Models and Algorithms for Power System Optimization: Modeling Technology for Practical Engineering ProblemsD'EverandMathematical Models and Algorithms for Power System Optimization: Modeling Technology for Practical Engineering ProblemsPas encore d'évaluation
- Mathematical Modelling: Education, Engineering and Economics - ICTMA 12D'EverandMathematical Modelling: Education, Engineering and Economics - ICTMA 12Pas encore d'évaluation
- Understanding Complex Ecosystem Dynamics: A Systems and Engineering PerspectiveD'EverandUnderstanding Complex Ecosystem Dynamics: A Systems and Engineering PerspectivePas encore d'évaluation
- Viscoelastic Structures: Mechanics of Growth and AgingD'EverandViscoelastic Structures: Mechanics of Growth and AgingPas encore d'évaluation
- A Joosr Guide to... Weapons of Math Destruction by Cathy O'Neil: How Big Data Increases Inequality and Threatens DemocracyD'EverandA Joosr Guide to... Weapons of Math Destruction by Cathy O'Neil: How Big Data Increases Inequality and Threatens DemocracyÉvaluation : 4 sur 5 étoiles4/5 (1)
- Differential Equation Analysis in Biomedical Science and Engineering: Ordinary Differential Equation Applications with RD'EverandDifferential Equation Analysis in Biomedical Science and Engineering: Ordinary Differential Equation Applications with RPas encore d'évaluation
- Electromagnetic Well Logging: Models for MWD / LWD Interpretation and Tool DesignD'EverandElectromagnetic Well Logging: Models for MWD / LWD Interpretation and Tool DesignÉvaluation : 5 sur 5 étoiles5/5 (1)
- Design and Analysis of Centrifugal CompressorsD'EverandDesign and Analysis of Centrifugal CompressorsPas encore d'évaluation
- Re-Modeling the Mind: Personality in BalanceD'EverandRe-Modeling the Mind: Personality in BalanceÉvaluation : 4 sur 5 étoiles4/5 (1)
- Ocean Tides: Mathematical Models and Numerical ExperimentsD'EverandOcean Tides: Mathematical Models and Numerical ExperimentsPas encore d'évaluation
- Introduction to Maintenance Engineering: Modelling, Optimization and ManagementD'EverandIntroduction to Maintenance Engineering: Modelling, Optimization and ManagementÉvaluation : 5 sur 5 étoiles5/5 (2)
- Actuarial Modelling of Claim Counts: Risk Classification, Credibility and Bonus-Malus SystemsD'EverandActuarial Modelling of Claim Counts: Risk Classification, Credibility and Bonus-Malus SystemsPas encore d'évaluation
- Mathematical Models of Social Evolution: A Guide for the PerplexedD'EverandMathematical Models of Social Evolution: A Guide for the PerplexedÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Mathematical Modelling in Science and Technology: The Fourth International Conference, Zurich, Switzerland, August 1983D'EverandMathematical Modelling in Science and Technology: The Fourth International Conference, Zurich, Switzerland, August 1983Xavier J.R. AvulaPas encore d'évaluation
- Quantitative Methods: An Introduction for Business ManagementD'EverandQuantitative Methods: An Introduction for Business ManagementÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- An Introduction to Mathematical ModelingD'EverandAn Introduction to Mathematical ModelingÉvaluation : 5 sur 5 étoiles5/5 (1)
- Introduction to Digital Systems: Modeling, Synthesis, and Simulation Using VHDLD'EverandIntroduction to Digital Systems: Modeling, Synthesis, and Simulation Using VHDLPas encore d'évaluation
- Analyzing Animal Societies: Quantitative Methods for Vertebrate Social AnalysisD'EverandAnalyzing Animal Societies: Quantitative Methods for Vertebrate Social AnalysisPas encore d'évaluation