Vibrations des milieux
discrets et continus
Luc Jaouen
Version datee du 19 avril 2005
Table des mati`eres
Introduction iii
1 Un Degre De Liberte 1
1.1 Oscillations libres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Reponse ` a une excitation harmonique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Theor`eme de superposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.4 Reponse ` a une excitation periodique quelconque . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.5 Reponse ` a une excitation quelconque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 n degres de liberte 9
2.1 Methode de la base modale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Syst`emes avec amortissement visqueux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3 Reponses forcees . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3 Vibration transversale des cordes 13
4 Vibrations des poutres 19
4.1 Denition dune poutre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2 Vibrations longitudinales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.2.1 Champ de deplacement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.2.2 Fonctionnelle de Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.3 Vibrations de exion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.3.1 Champ de deplacement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.3.2 Fonctionnelle de Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.4 Vibrations de torsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.4.1 Champ de deplacement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.4.2 Fonctionnelle de Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5 Vibrations des plaques 29
5.1 Denition dune plaque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.2 Hypoth`eses de condensation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.3 Vibrations longitudinales des plaques minces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.4 Vibrations de exion des plaques minces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.4.1 Champ de deplacement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.4.2 Fonctionnelle de Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
6 Introduction `a lanalyse modale 35
6.1 Denition de lanalyse modale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
6.2 Theor`eme de reciprocite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
6.3 Dierentes formes de FRF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
6.4 Estimateurs de FRF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
6.5 Amortissements visqueux et structural . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6.6 Methodes dextraction de param`etres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.7 Exemple : cas dune poutre en exion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
ii Table des mati`eres
A Formalisme de Lagrange et equations dEuler 43
A.1 Rappel sur le formalisme de Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
A.2 Equations dEuler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
A.2.1 Fonctionnelle de Hamilton pour les vibrations longitudinales de poutres droites minces . . 43
A.2.2 Autres formes de fonctions dEuler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Introduction
Ce cours est fortement inspire, dans son contenu et sa redaction, de divers autres sources denseignement,
particuli`erement :
Le cours de mecanique du DEA dAcoustique Appliquee (Universite du Maine, France) realise par Bernard
Castagn`ede.
Le cours de vibrations de lENSIM (Universite du Maine) de Jean-Claude Pascal.
Le cours de rayonnement acoustique des structures (GMC 721, Universite de Sherbrooke, Qc, Canada)
dAlain Berry.
Ces ouvrages, souvent ecrits dans des contextes plus larges ou connexes au present document, peuvent consti-
tuer une bonne source dinformation complementaire ou alternative.
Merci de me faire part des eventuelles erreurs ou incoherences que vous releverez au cours de ces quelques
pages, ainsi que vos critiques et suggestions ` a :
luc.jaouen@univ-lemans.fr
1 Un Degre De Liberte
Ce chapitre presente rapidement les resultats importants pour le cas dun syst`eme mecanique lineaire ` a 1
ddl avec amortissement. Lanalogie avec un syst`eme electrique est evidente, la litterature sur le sujet nen est
que plus fournie.
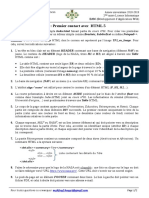
1.1 Oscillations libres
Soit loscillateur harmonique amorti par eet visqueux (proportionnel ` a la vitesse) de la gure 1.1.
c
m
x
k
Fig. 1.1 Representation schematique dun oscillateur amorti simple
Lequation de son mouvement est :
m x(t) +c x(t) +kx(t) = 0 (1.1)
En supposant une dependance en temps de la forme e
rt
, on peut ecrire lequation caracteristique associee ` a
cette equation du mouvement :
mr
2
+cr +k = 0
Les solutions de lequation caracteristique sont :
r
1,2
=
c
2m
c
2
4km
2m
En introduisant les termes :
2
0
=
k
m
pulsation naturelle non amortie
c
2
cr
4km = 0 =c
cr
= 2
km = 2m
0
amortissement critique
=
c
c
cr
=
c
2m
0
facteur damortissement visqueux
on peut alors re-ecrire lequation du mouvement sous la forme :
x + 2
0
x +
2
0
x = 0
La solution generale de cette equation dierentielle lineaire, homog`ene, ` a coecients constants secrit (cf
cours math.) :
x(t) = Ae
r1t
+Be
r2t
o` u A et B sont des constantes arbitraires determinees dapr`es les conditions initiales.
3 cas sont observes suivant le signe de = c
2
4km (cf gures 1.2, 1.3 et 1.4) :
2 Un Degre De Liberte
t
x
Fig. 1.2 Sur amorti.
t
x
Fig. 1.3 Critique
t
x
Fig. 1.4 Sous amorti
Si > 0, > 1, r
1,2
=
0
0
_
2
1, loscillateur est dit sur amorti.
x(t) = C
1
e
r1t
+ C
2
e
r2t
(1.2)
Si = 0, = 1, r
1,2
=
0
=
0
, lamortissement est critique. Cest ce quon recherche dans le cas
dune suspension automobile par exemple.
x(t) = (C
1
t +C
2
)e
0t
(1.3)
Si < 0, 0 < < 1, r
1,2
=
0
j
0
_
1
2
, loscillateur est dit sous amorti. Cest le cas de la plupart
des oscillateurs mecaniques courants.
x(t) =
_
C
1
cos
_
_
1
2
0
t
_
+C
2
sin
_
_
1
2
0
t
_
_
e
0t
(1.4)
ou x(t) = Asin
_
_
1
2
0
t
_
e
0t
Ce dernier resultat est celui dun regime pseudo-periodique dont on remarque que la pseudo pulsation
p
=
0
_
1
2
di`ere de la pulsation naturelle non amortie
0
par le terme
_
1
2
lui meme fonction
de lamortissement ;
p
0
(cf g. 1.5).
0 1 2 3
0
0.2
0.4
0.6
0.8
1
1.2
1.4
A
m
p
l
i
t
u
d
e
|
X
|
/
0
= 0.1
= 0.5
= 1
0 1 2 3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
/
0
P
h
a
s
e
= 0.1
= 0.5
= 1
Fig. 1.5 Inuence de lamortissement sur la position de la resonance dune syst`eme ` a 1 ddl. m = 10 kg, k = 4
N.m
1
.
Reponse ` a une excitation harmonique 3
1.2 Reponse `a une excitation harmonique
Lequation du mouvement pour un oscillateur harmonique amorti soumis ` a une force exterieure F(t) secrit :
m x +c x +kx = F(t) (1.5)
Le cas le plus simple est celui dune force harmonique, ie F(t) = F cos(t + ). La solution generale de
lequation du mouvement est alors une combinaison lineaire de la solution generale de lequation sans second
membre (regime des oscillations libres, cf 1.1), et dune solution particuli`ere de lequation avec second membre.
Comme precedemment, on peut re-ecrire 1.5 comme :
x + 2
0
x +
2
0
x =
F(t)
m
et passer en notation complexe
1
:
F(t) = F
0
cos(t +) soit en notation complexe
F(t) = Fe
jt
, F(t) = Re[
F(t)]
On consid`ere une solution particuli`ere sous la forme :
x(t) = Acos(t + +) soit en notation complexe x(t) = Xe
jt
, x(t) = Re[ x(t)] (1.6)
Lequation 1.5 secrit alors en notation complexe :
_
2
+j2
0
+
2
0
_
Xe
jt
=
F
m
e
jt
(1.7)
A partir de cette derni`ere notation, lamplitude complexe X de la solution particuli`ere sobtient facilement :
X =
F/m
2
0
2
+j2
0
On peut exprimer le module et la phase du deplacement x(t) comme :
|X| =
|F|/m
_
(
2
0
2
)
2
+ (2
0
)
2
= A
= arctan
2
0
2
0
2
On peut dores et dej` a exprimer la fonction de transfert H() qui sera etudiee plus en detail dans le chapitre
danalyse modale :
H() =
X
F
=
1
m(
2
0
2
+j2
0
)
=
1
(k m
2
) + jc
Cette fonction de transfert peut etre representee suivant son amplitude et sa phase ou suivant ses parties
reelle et imaginaire (cf g. 1.2).
1.3 Theor`eme de superposition
Si x
1
(t) est solution de lequation 1.5 et si x
2
(t) lest egalement, alors x(t) = x
1
(t) +x
2
(t) est aussi solution
de 1.5 :
_
m x
1
+c x
1
+kx
1
= F
1
(t)
m x
2
+c x
2
+kx
2
= F
2
(t)
=m x +c x +kx = F(t) avec F = F
1
+F
2
Le theor`eme de superposition tient au fait que lequation dierentielle de loscillateur harmonique est lineaire.
Dans le cas dune equation dierentielle non lineaire, il ne sapplique plus.
1
Les grandeurs en gras representent des grandeurs complexes
4 Un Degre De Liberte
0 1 2 3
0
0.2
0.4
0.6
0.8
1
1.2
1.4
A
m
p
l
i
t
u
d
e
|
X
|
/
|
F
|
/
0
0 1 2 3
0
0.2
0.4
0.6
0.8
1
/
0
P
h
a
s
e
0 1 2 3
1
0.5
0
0.5
1
/
0
R
e
(
H
)
0 1 2 3
1.5
1
0.5
0
/
0
I
m
(
H
)
Fig. 1.6 Representations de la fonction de transfert H pour m = 10 kg, k = 4 N.m
1
et c = 4 N.s.m
1
.
1.4 Reponse `a une excitation periodique quelconque
Lorsque la force exterieure est quelconque mais periodique, de periode T, elle peut secrire sous la forme
dune serie de Fourier :
F(t) =
a
0
2
+
n=1
a
n
cos(nt) +b
n
sin(nt) o` u = 2/T
avec
_
_
a
n
=
2
T
_
T/2
T/2
F(t) cos(nt)dt
b
n
=
2
T
_
T/2
T/2
F(t) sin(nt)dt
La solution ` a cette excitation est alors determinee en faisant usage du theor`eme de superposition (cf 1.3)
et les resultats ` a une excitation harmonique.
Exemple
Calculer la reponse forcee de locillateur harmonique, sans amortissement, ` a la fonction creneau.
F
0
+F
0
T/2
F(t)
t
0
Fig. 1.7 Fonction creneau
De lobservation de la fonction creneau, on deduit rapidement que n, a
n
= 0 (la fonction creneau est
impaire alors que la fonction cosinus est paire).
Reponse ` a une excitation quelconque 5
b
n
=
2
T
F
0
_
_
T/2
0
sin(nt)dt
_
0
T/2
sin(nt)dt
_
=
4F
0
T
_
T/2
0
sin(nt)dt
=
4F
0
nT
_
1 cos
_
n
T
2
_
_
seules les composantes impaires sont non nulles :
b
2p+1
=
4F
0
(2p + 1)
soit F(t) =
4F
0
p=1
1
2p + 1
sin
_
2
T
(2p + 1)t
_
La solution ` a lordre p verie donc lequation :
m x +kx =
4F
0
1
2p + 1
sin
_
2
T
(2p + 1)t
_
On consid`ere une solution particuli`ere, ` a lordre p, sous la forme :
x
2p+1
(t) = X
2p+1
sin
_
2
T
(2p + 1)t
_
=X
2p+1
=
4F
0
1
2p + 1
1
k m
_
2
T
_
2
(2p + 1)
2
On ecrit alors la solution generale en utilisant le theor`eme de superposition :
x(t) =
4F
0
p=1
1
2p + 1
sin
_
2
T
(2p + 1)t
_
k m
_
2
T
_
2
(2p + 1)
2
1.5 Reponse `a une excitation quelconque
Avant de determiner la reponse ` a une excitation quelconque, il faut determiner la reponse ` a une impulsion :
h(t). Lexcitation, inniment breve communique au syst`eme une certaine quantite de mouvement initiale p
0
sans que le syst`eme nait encore le temps de se deplacer. Loscillateur continue sur un mouvement de vibrations
libres.
En prenant le cas dun oscillateur sous amorti (cf eq. 1.4), pour lequel :
x(t) =
_
C
1
cos
_
_
1
2
0
t
_
+C
2
sin
_
_
1
2
0
t
_
_
e
0t
les conditions initiales precedentes se traduisent comme :
x(t = 0) = 0 = C
1
= 0
m x(t = 0) = p
0
= C
2
=
p
0
m
p
La reponse impulsionnelle h(t) est donc (x(t) = h(t)
_
t
0
p
0
(t)dt) :
_
_
_
h(t) =
1
m
p
e
0t
sin(
p
t) t 0
h(t) = 0 t < 0 (reponse causale)
(1.8)
6 Un Degre De Liberte
Nous pouvous maintenant determiner la reponse q(t) ` a une excitation quelconque Q(t) causale (Q(t) = 0 <
t = 0). Cette solution secrit sous la forme dun produit de convolution
2
:
q(t) = h(t) Q(t) =
_
h()Q(t )d
= Q(t) h(t) =
_
t
0
h(t )Q()d
En reportant lexpression de h(t) (1.8), on aboutit ` a lintegrale de Duhamel :
q(t) =
e
0t
m
p
_
t
0
e
0
Q() sin
_
p
(t )
_
d (1.9)
Pour un syst`eme tr`es faiblement amorti, 0 et
p
0
:
q(t)
1
m
0
_
t
0
Q() sin
_
0
(t )
_
d (1.10)
Exemple
Determinons la reponse dun oscillateur faiblement amorti ` a une fonction echelon
3
en t = :
m x +c x +kx =
_
0 pour t <
constante = F
0
pour t
De 1.10, on en deduit que :
x(t) =
F
0
m
p
e
0t
_
t
e
0
sin
_
p
(t )
_
d
Apr`es integration, on obtient :
x(t) =
F
0
k
F
0
k
_
1
2
cos
_
0
(t )
_
pour t
avec = arctan
_
1
2
En labsence damortissement, le syst`eme oscille indeniment :
x(t) =
F
0
k
_
1 cos
_
0
(t )
_
_
Quand 0 < < 1 et t , on tend vers la reponse stationnaire du syst`eme :
x(t) =
F
0
k
Nota Bene : Il peut etre plus simple dutiliser des transformees de Laplace pour determiner les equations
de mouvements ` a diverses excitations, le calcul de la convolution saverant complexe (cf TD).
2
Le produit de convolution est commutatif
3
Aussi appelee fonction de Heaviside
Reponse ` a une excitation quelconque 7
0 0.5 1 1.5 2 2.5 3 3.5 4
2000
0
2000
4000
6000
8000
F(t)
0 0.5 1 1.5 2 2.5 3 3.5 4
0.5
0
0.5
1
1.5
2
Temps t (s)
x(t)
F
k
0
Fig. 1.8 Solution de lexemple pour le cas m = 10 kg, k = 4000 N.m
1
, c = 32 N.s.m
1
( = 0.08), F
0
= 4 000
N, = 1 s
8 Un Degre De Liberte
2 n degres de liberte
Ce chapitre presente rapidement la methode de resolution et les resultats importants pour des syst`emes
mecaniques ` a plusieurs degres de liberte. Il est egalement une seconde introduction au chapitre danalyse modale.
2.1 Methode de la base modale
Une des methodes elegantes de resolution dun syst`eme ` a n degres de liberte est la methode de la base
modale qui consiste ` a ramener le probl`eme de n ddl couples, ` a un ensemble de syst`emes ` a 1 ddl decouples
en normalisant lequation du mouvement par rapport ` a la masse.
en realisant une transformation de coordonnees pour se placer dans la base modale o` u les equations du
mouvement sont decouplees.
Soit le syst`eme ` a n degres de liberte ecrit sous sa forme matricielle
1
:
M x(t) +Kx(t) = 0
dont on veut determiner la reponse libre pour les conditions initiales :
x(0) vecteur des deplacements initiaux ` a t = 0
x(0) vecteur des vitesses initiales ` a t = 0
La premi`ere etape consiste ` a normaliser la matrice masse
2
. En utilisant le changement de variable x =
M
1/2
q et en multipliant le syst`eme dequations du mouvement par M
1/2
:
M
1/2
MM
1/2
q(t) +M
1/2
KM
1/2
q(t) = 0
On remarque alors que :
M
1/2
MM
1/2
= I matrice unitaire/identite
M
1/2
KM
1/2
=
K
Finalement, le syst`eme peut secrire :
I q +
Kq = 0
Les conditions initiales se re-ecrivent :
q(0) = M
1/2
x(0) et q(0) = M
1/2
x(0)
La deuxi`eme etape est le calcul des valeurs et vecteurs propres. En cherchant une solution de la forme
x(t) = we
jt
soit q(t) = ve
jt
le syst`eme devient :
(
2
I +
K)ve
jt
= 0
En posant =
2
et en dehors de la solution triviale (v = 0), on remarque quon se ram`ene ` a un probl`eme
typique de recherche de valeurs propres :
Kv = v
1
Les grandeurs en gras representent des tenseurs : dordre 1 pour les vecteurs, 2 pour les matrices
2
qui, comme la matrice raideur, est carree, de dimension nn et generalement symetrique. La matrice masse est de plus souvent
diagonale ; cest le cas de gure que nous supposons ici.
10 n degres de liberte
Les n valeurs propres sont obtenues en cherchant les solutions de lequation caracteristique :
det(I
K) = 0
Les n vecteurs propres sont les solutions des n equations associees ` a chaque valeur propre
i
:
(
i
I
K)v
i
= 0
Les vecteurs propres v forment un ensemble de vecteurs lineairement independants (ie orthogonaux, cest
ce qui implique la relation dorthogonalite entre les vecteurs propres). Ils ne sont pas, ` a priori, normes. On note
u
i
le vecteur norme de v
i
. Les vecteurs u sont donc othonormaux et on peut denir une matrice orthogonale P
telle que :
P = [u
1
u
2
. . . u
n
]
Dapr`es les proprietes des vecteurs u, on montre que :
P
T
P = I P
T
KP = diag() P
1
= P
La projection dans la base modale constitue la troisi`eme etape :
On op`ere le dernier changement de variable suivant :
q(t) = Pr(t)
et on multiplie le syst`eme dequations du mouvement par P
T
P
T
Pr(t) +P
T
KPr(t) = 0
En tenant compte des proprietes enoncees plus haut et en considerant
i
=
2
i
, cette transformation conduit
` a :
Ir(t) + diag(
2
i
)r(t) = 0
qui represente un syst`eme de n equations independantes (ie decouplees) :
r
1
(t) +
2
1
r
1
(t) = 0
r
2
(t) +
2
2
r
2
(t) = 0
. . .
Les condition initiales sexpriment dans la base modale comme :
q(t) = Pr(t) = r(t) = P
1
q(t) = P
T
q(t)
r(0) = P
T
q(0) et r(0) = P
T
q(0)
La solution pour r
i
(t) est celle dun syst`eme ` a un degre de liberte que lon peut mettre sous la forme :
r
i
(t) =
_
2
i
r
2
i0
+ r
2
i0
i
sin
_
i
t + arctan
i
r
i0
r
i0
_
en determinant les constantes amplitude et phase ` a partir des conditions initiales.
La quatri`eme etape est la transformation inverse.
En utilisant les equations precedentes, il est possible de calculer le vecteur des deplacements x ` a partir des
solutions dans la base modale r :
x = M
1/2
q = M
1/2
Pr = Sr
La matrice S = M
1/2
P est constituee de vecteurs colonnes notes :
S = [
1
2
n
]
tels que
i
= M
1/2
u
i
.
i
est le vecteur de la deformee modale du mode i, ie le vecteur des deplacements unitaires (
i
)
j
de chaque
masse j.
Les deplacements peuvent secrirent :
x(t) = Sr(t) =
n
i=1
r
i
(t)
i
Syst`emes avec amortissement visqueux 11
soit pour une masse j :
x
j
=
n
i=1
r
i
(t)(
i
)
j
=
n
i=1
A
i
sin(
i
t +
i
)(
i
)
j
avec :
A
i
=
_
2
i
r
2
i0
+ r
2
i0
i
et
i
= arctan
i
r
i0
r
i0
Une presentation graphique peut-etre faite de ce que lon vient de voir. Si on imagine une cloche frappee
par un marteau ` a linstant t. A un instant t + t, le mouvement complexe de la cloche est un mouvement
doscillations libres que lon peut decompose en formes modales independantes (et plus simples). La physique
de ces formes modales nous permet de leur donner des equivalents mathematiques doscillateurs ` a 1 ddl :
+ + =
Changement de base
x = Sr =
n
i=1
r
i
i
= + +
n equations decouplees
Ir + diag(
2
i
)r = 0
2.2 Syst`emes avec amortissement visqueux
Les syst`emes reels sont amortis mais on ne connait pas bien, dans la plupart des cas, le mod`ele damor-
tissement. Souvent, le mod`ele damortissement visqueux est utilise pour des raisons de simplicite. La methode
consiste ` a considerer un amortissement modal
i
< 1 inclus dans les equations decouplees de la base modale :
r
i
+ 2
i
i
r
i
+
2
i
r
i
= 0 (2.1)
dont les solutions sont :
r
i
(t) = A
i
e
iit
sin(
pi
t +
i
) avec
pi
=
i
_
1
2
i
Lamortissement modal
i
devra etre soit determine experimentalement, soit identie ` a partir de la matrice
des coecients damortissement C qui entre dans le syst`eme dequations du mouvement :
M x(t) +C x(t) +Kx(t) = 0
En r`egle generale, il nest pas possible de diagonaliser en meme temps les 3 matrices M, C et K par
decomposition sur la base modale, des methodes numeriques sont alors utilisees. Cependant, il existe un cas
permettant de decoupler les n equations : si la matrice C peut etre approchee par une combinaison lineaire des
matrices masse et raideur :
C = M+K et constants
Cette forme damortissement est appele amortissement visqueux proportionnel.
Le syst`eme dequations du mouvement secrit alors :
M x(t) + [M+K] x(t) +Kx(t) = 0
en utilisant les memes changements de variables que dans le cas non amorti : x = M
1/2
q, q = Pr et en
multipliant le syst`eme par, successivement, M
1/2
et P
T
, on obtient :
I q(t) + [I +
K] q(t) +
Kq(t) = 0
Ir(t) + [I + diag(
2
i
)] r(t) + diag(
2
i
)r(t) = 0
Cette derni`ere equation ne comporte que des matrices diagonales, donc correspond ` a n equations modales
decouplees :
r
i
+ [ +
2
i
] r
i
+
2
i
r
i
= 0
En rapprochant cette equation de celle utilisant lamortissement modal
i
(2.1), on obtient lequivalence
2
i
i
= +
2
i
do` u :
i
=
2
i
+
i
2
12 n degres de liberte
2.3 Reponses forcees
Le syst`eme force se met sous la forme :
M x(t) +C x(t) +Kx(t) = F(t)
o` u F(t) est le vecteur des forces appliquees ` a chaque masse :
F = [F
1
F
2
]
T
En suivant toujours la meme demarche : on pose x = M
1/2
q et on multiplie le syst`eme par M
1/2
:
I q(t) +
C q(t) +
Kq(t) = M
1/2
F(t)
avec
C = M
1/2
CM
1/2
, puis en posant q(t) = Pr(t) et en multipliant par P
T
:
Ir(t) + diag(2
i
i
) r(t) + diag(
2
i
)r(t) = P
T
M
1/2
F(t)
o` u
i
est obtenu de la methode damortissement proportionnel.
f (t) = P
T
M
1/2
F(t) est le vecteur des forces modales dont les elements f
i
(t) sont des combinaisons lineaires
des forces F
i
(t). Finalement, lequation modale decouplee est de la forme :
r
i
+ 2
i
i
r
i
+
2
i
r
i
= f
i
dont la solution est celle du syst`eme ` a 1 ddl de deplacement r
i
(t) :
r
i
(t) = A
i
e
iit
sin(
pi
t +
i
) +f
i
h
i
(t)
= A
i
e
iit
sin(
pi
t +
i
) +
1
pi
e
iit
_
0
f
i
()e
ii
sin[
pi
(t )]d
Les coecients A
i
et
i
de la solution generale sont determines en utilisant les conditions initiales. En regime
stationnaire (harmonique permanent), la solution particuli`ere pour F
i
(t) = F
i0
cos(t) est :
r
i
(t) =
f
i0
_
(
2
i
2
)
2
+ (2
i
i
)
cos
_
t arctan
2
i
2
i
2
_
avec f
0
= P
T
M
1/2
F
0
.
Le vecteur deplacement secrit comme precedemment :
x(t) = Sr(t) =
n
i=1
r
i
(t)
i
3 Vibration transversale des cordes
Letude des vibrations libres dun corde constituera notre premi`ere approche au cas des milieux continus
(1D). On sinteresse ici au cas de la vibration transversale des cordes sans raideur (souples) mais possedant
une elasticite nie (ce qui modelise plus une chane constituee de tr`es petits maillons plut ot quune corde
monolament). De nombreuses hypoth`eses sont souvent emises sur le comportement du syst`eme an de simplier
les calculs. Il nest pas toujours evident de donner un sens physique ` a ces hypoth`eses.
Pour rappel, cette etude des milieux continus est realisee sous lhypoth`ese des petites deformations (petits
angles).
La vibration des cordes, de fa con beaucoup plus large fait lobjet du livre de C. Valette et C. Cuesta[1].
x
y y
x
dx x
T(x)
T(x+dx)
Lequation du mouvement de la corde peut-etre obtenue simplement ` a partir de lequation dequilibre dyna-
mique (RFD) ou dune consideration energetique.
A partir de la relation fondamentale de la dynamique (RFD) :
m y =
F
ext
(3.1)
En notant la masse lineique de la corde (de dimension [kg.m
1
]) et T la tension de la corde, on ecrit la
projection suivant laxe y de 3.1 comme :
dx
2
y
t
2
= T sin +T sin (3.2)
(En projetant la RFD sur laxe x on montre facilement quon peut faire lhypoth`ese que les tensions en x et
x +dx sont equivalentes en module pour des petits angles et ).
or
_
_
sin tan =
y
x
x
sin tan =
y
x
x+dx
de quoi lon peut re-ecrire lequation 3.2 :
2
y
t
2
=
T
y
x
x+dx
y
x
x
dx
2
y
t
2
=
T
2
y
x
2
(3.3)
En introduisant la constante c =
_
T/, de meme dimension quune vitesse, on aboutit ` a :
c
2
2
y
x
2
=
2
y
t
2
(3.4)
14 Vibration transversale des cordes
A partir de lequation de Lagrange :
En notant l la longueur de la corde au repos et l
sa longueur en vibration, on a :
l
=
_
l
0
ds
_
l
0
_
1 +y
2
,x
dx
l
_
l
0
_
1 +
1
2
y
2
,x
_
dx = l +
1
2
_
l
0
y
2
,x
dx
l = l
l =
1
2
_
l
0
y
2
,x
dx
Les expressions des energies cinetique totale E
c
et potentielle totale E
p
du syst`eme sont respectivement :
E
c
=
2
_
l
0
y
2
,t
dx
E
p
= Tl =
T
2
_
l
0
y
2
,x
dx
Lequation dEuler-Lagrange, qui secrit :
d
dt
_
E
c
x
_
E
p
x
= 0
sapplique en tout point x, pour lequel on a alors :
E
c
=
2
y
2
,t
=
E
c
x
=
E
c
y
y
x
=
E
c
y
y
x
= 2
2
y
x
y
t
d
dt
_
E
c
x
_
=
y
x
2
y
t
2
E
p
=
T
2
y
2
,x
=
E
p
x
= 2
T
2
y
x
2
y
x
2
= T
y
x
2
y
x
2
Do` u nalement :
2
y
t
2
=
T
2
y
x
2
(3.5)
On retrouve la meme solution quen appliquant la RFD.
Dans le cas dune corde innie (de grande dimension par rapport aux autres dimensions du probl`eme), la
solution des equations (3.3) et (3.5) represente la propagation de deux ondes :
y(x, t) = g
1
(x ct)
. .
propagation vers les x > 0
+ g
2
(x +ct)
. .
propagation vers les x < 0
Si de plus, on suppose une excitation harmonique, lequation peut se mettre sous une forme semblable ` a
celle de lequation dHelmholtz :
2
y(x)
x
2
+k
2
y(x) = 0 avec k =
c
La solution ` a cette derni`ere equation est y(x) = Ae
jkx
+ Be
jkx
(la dependance temporelle en e
jt
etant
implicite).
Pour une corde de dimension nie, le deplacement y(x, t) dependra des conditions de xation aux extremites
(ie les conditions limites). La technique de separation des variables est privilegiee pour obtenir les solutions du
mouvement avec conditions limites particuli`eres.
On suppose une solution secrivant sous la forme :
y(x, t) = X(x) T(t)
(o` u T est une fonction et ne doit pas etre confondue avec lamplitude de la force de tension)
15
En rempla cant dans lequation du mouvement 3.3, on a :
c
2
d
2
X
dx
2
T(t) =
d
2
T
dt
2
X(x)
soit :
X
(x)
X(x)
=
1
c
2
T(t)
T(t)
= constante = k
2
(3.6)
en eet, Les deux equations dierentielles en X et T ayant des variables dierentes independantes x et t, elles
ne peuvent etre egales qu` a une constante que lon choisie de noter k
2
pour la simplication des calculs futurs.
Lequation 3.6 aboutit ` a la resolution de deux equations separees :
_
X
(x) +k
2
X(x) = 0
T(t) +k
2
c
2
T(t) = 0
dont les solutions sont :
_
X(x) = sin(kx) + cos(kx)
T(t) = sin(t) + cos(t) avec = kc
On a donc nalement, pour expression de la solution du mouvement des equations 3.3 ou 3.5 :
y(x, t) =
_
sin(kx) + cos(kx)
__
sin(t) + cos(t)
_
avec = kc
les constantes et seront determinees des conditions aux limites, et des conditions initiales.
Exercice
Calculer le champ de deplacement dune corde pincee en son milieu.
16 Vibration transversale des cordes
y
x
x = 0 x = l
h
Sit ot la corde lachee, elle entre en vibrations libres. Ces vibrations sont determinees des resultats precedents
et des conditions initiales. Ces conditions initiales (au temps t = 0) sont un deplacement impose, sans vitesse
de la corde et une vitesse initiale nulle :
y(x, 0)
_
_
2h
x
l
0 x
l
2
2h
_
1
x
l
_
l
2
x l
et y(x, 0) = 0.
En appliquant les conditions limites y(0, t) = y(l, t) = 0, t (extremites encastrees), on obtient :
= 0
sin(kl) = 0 =kl = n , n N
Il existe donc une innite de solutions telles que k = n/l. Chaque solution correspond ` a un etat privilegie
de vibration de la corde appele egalement mode de vibration. Mathematiquement, la reponse generale est une
combinaison lineaire de tous ces modes :
y(x, t) =
n=1
sin
_
nx
l
__
A
n
cos
_
nc
l
t
_
+B
n
sin
_
nc
l
t
__
(3.7)
Il nous reste ` a calculer les termes A
n
et B
n
.
Dapr`es les conditions initiales, la relation (3.7) qui impose pour la vitesse de la corde :
y(x, t) =
n=1
sin
_
nx
l
__
nc
l
__
A
n
sin
_
nc
l
t
_
+B
n
cos
_
nc
l
t
__
la condition y(x, 0) = 0 se re-ecrit :
y(x, 0) =
n=1
B
n
_
nc
l
_
sin
_
nx
l
_
= 0
ce qui implique que B
n
= 0 n.
En multipliant la condition sur y(x, 0) par le terme sin(nx/l), et en integrant sur la longueur de la corde,
on a :
_
l
0
A
n
sin
2
_
nx
l
_
dx =
_
l/2
0
2hx
l
sin
_
nx
l
_
dx +
_
l
l/2
2h
_
1
x
l
_
sin
_
nx
l
_
dx
l
A
n
2
=
2h
l
_
_
l/2
0
xsin
_
nx
l
_
dx +
_
l
l/2
(l x) sin
_
nx
l
_
dx
_
Les deux integrales sint`egrent par parties et sexpriment :
_
l/2
0
xsin
_
nx
l
_
dx =
l
2
2n
cos
_
n
2
_
+
_
l
2
n
_
sin
_
n
2
_
_
l
l/2
(l x) sin
_
nx
l
_
dx =
l
2
2n
cos
_
n
2
_
_
l
2
n
_
sin(n) +
_
l
2
n
_
sin
_
n
2
_
17
do` u :
A
n
=
4h
l
2
2
l
2
n
sin
_
n
2
_
A
n
= (1)
(n1)/2
_
8h
n
2
2
_
avec n impair
et nalement :
y(x, t) =
n=1,3,...
(1)
(n1)/2
_
8h
n
2
2
_
sin
_
nx
l
_
cos
_
nc
l
t
_
References
[1] C. Valette et C. Cuesta, Mecanique de la corde vibrante, Hermes, 1993
4 Vibrations des poutres
Ce chapitre presente les vibrations longitudinales, de exion et de torsion des poutres. Il decrit egalement
de fa con plus rigoureuse la mise en oeuvre de lapproche variationnelle pour le cas de materiaux continus (1D).
Les termes qui ne sont pas denis ici sont presentes dans tout bon cours de Resistance Des Materiaux.
4.1 Denition dune poutre
On nomme poutre un milieu continu ayant une dimension tr`es grande par rapport aux deux autres.
2
1
b
l
h
3
O
S
Fig. 4.1 Representation dune poutre droite dans le rep`ere (0, 1, 2, 3)
On note (x
1
, x
2
, x
3
) les coordonnees, dans le rep`ere (0, 1, 2, 3), dun point M de la poutre dont on cherche ` a
exprimer le champ de deplacement u
i
(M, t) :
u
i
(M, t)
_
_
_
u
1
(x
1
, x
2
, x
3
, t)
u
2
(x
1
, x
2
, x
3
, t)
u
3
(x
1
, x
2
, x
3
, t)
La geometrie particuli`ere qui a ete denie va permettre de simplier le champ de deplacement u
i
(M, t)
qui depend par ailleurs du type de materiau, de lexcitation et des conditions limites. Ces simplications ou
hypoth`eses sur le champ de deplacement sont aussi appelees hypoth`eses de condensation. Dautres hypoth`eses
simplicatrices apparatront plus tard. Liees au type dexcitation elles impliqueront des etudes separees pour
les vibrations longitudinales, de torsion ou de exion des poutres.
Les hypoth`eses de condensation pour les poutres consistent ` a eectuer un developpement en serie de Taylor
de u
i
(x
1
, x
2
, x
3
, t) par rapport ` a x
2
et x
3
:
u
i
(x
1
, x
2
, x
3
, t) = u
i
(x
1
, 0, 0, t) + x
2
u
i
x
2
(x
1
, 0, 0, t) +x
3
u
i
x
3
(x
1
, 0, 0, t)
+
x
2
2
2
2
u
i
x
2
2
(x
1
, 0, 0, t) +
x
2
3
2
2
u
i
x
2
3
(x
1
, 0, 0, t)
+ x
2
x
3
2
u
i
x
2
x
3
(x
1
, 0, 0, t) +
20 Vibrations des poutres
La theorie des poutres minces consiste ` a negliger les termes du 2
`eme
ordre et dordres superieurs dans ce
developpement :
u
i
(x
1
, x
2
, x
3
, t) u
i
(x
1
, 0, 0, t) +x
2
u
i
x
2
(x
1
, 0, 0, t) +x
3
u
i
x
3
(x
1
, 0, 0, t)
On notera par la suite :
u
i
(x
1
, x
2
, x
3
, t) u
0
i
(x
1
, t) +x
2
u
2
i
(x
1
, t) +x
3
u
3
i
(x
1
, t)
soit :
_
_
u
1
(x
1
, x
2
, x
3
, t) u
0
1
(x
1
, t) +x
2
u
2
1
(x
1
, t) +x
3
u
3
1
(x
1
, t)
u
2
(x
1
, x
2
, x
3
, t) u
0
2
(x
1
, t) +x
2
u
2
2
(x
1
, t) +x
3
u
3
2
(x
1
, t)
u
3
(x
1
, x
2
, x
3
, t) u
0
3
(x
1
, t) +x
2
u
2
3
(x
1
, t) +x
3
u
3
3
(x
1
, t)
. .
rotations
(4.1)
Physiquement, le deplacement dans chaque direction 1, 2 ou 3 se compose dun mouvement densemble (u
0
i
)
et de deux rotations (x
2
u
2
i
+x
3
u
3
i
)
2
u
1
0
x
2
x
2
u
1
2
1
u
1
0
x u
1
3
3
x
3
1
3
La theorie des poutres minces suppose que les sections droites restent planes apr`es la deformation : cest lhy-
poth`ese de Bernoulli. Lensemble du champ de deplacement est connu si les deplacements et les rotations sont
connus le long dun axe moyen de la poutre : cet axe est appele axe neutre, ou bre neutre. Lhypoth`ese de conden-
sation, pour une poutre mince consiste ` a reduire le milieu tridimensionnel en un milieu unidimensionnel equi-
valent. Les inconnues du probl`eme apr`es condensation sont les neufs fonctions u
0
1
, u
0
2
, u
0
3
, u
2
1
, u
2
2
, u
2
3
, u
3
1
, u
3
2
, u
3
3
.
Ces neuf fonctions ne dependent que dune seule variable despace x
1
et du temps t.
A ce stade, pour resoudre un probl`eme de vibrations de poutre mince, on peut utiliser le champ de depla-
cement donne par lexpression 4.1, linjecter dans la fonctionnelle de Hamilton et trouver lextremum de cette
fonctionnelle par rapport aux 9 fonctions inconnues. Une telle demarche est encore compliquee, on pref`ere re-
duire encore le nombre de fonctions inconnues pour decrire le deplacement. Ces simplications supplementaires
sont possibles si lon etudie separement les vibrations longitudinales (en traction-compression) des vibrations
de exion ou de torsion.
tractioncompression flexion torsion
4.2 Vibrations longitudinales
4.2.1 Champ de deplacement
Pour les vibrations longitudinales, on suppose que les deplacements se font de fa con privilegiee le long de
laxe neutre de la poutre, ce qui correspond ` a une excitation dans laxe de la poutre. On peut alors simplier le
champ de deplacement general 4.1 en imposant :
_
_
_
u
1
(x
1
, x
2
, x
3
, t) u
0
1
(x
1
, t)
u
2
(x
1
, x
2
, x
3
, t) 0
u
3
(x
1
, x
2
, x
3
, t) 0
(4.2)
La seule fonction inconnue u
0
1
(x
1
, t) correspond au deplacement densemble dans la direction 1 de chaque
section droite.
Vibrations longitudinales 21
Nota Bene : on a, ici, neglige leet de Poisson (contraction de la section droite) consecutif ` a la deformation
axiale. Leet de Poisson correspond aux termes x
2
u
2
2
(x
1
, t) et x
3
u
3
3
(x
1
, t) de 4.1. Il faut garder en tete quil
sagit dune hypoth`ese de simplication du probl`eme par rapport ` a la theorie des milieux continus 3D dont il
faudra verier le bien fonde par rapport aux observations experimentales.
4.2.2 Fonctionnelle de Hamilton
Les hypoth`eses cinematiques (champ de deplacement) etant denies pour la geometrie et le type dexcitation
etudies, lapproche variationnelle comprend systematiquement les points suivants :
1. Calculs des deformations
2. Construction de la fonctionnelle de Hamilton
3. Extremalisation de la fonctionnelle de Hamilton
4.2.2.1 Calculs des deformations
Par denition :
ij
=
1
2
_
u
i,j
(x
1
, x
2
, x
3
, t) +u
j,i
(x
1
, x
2
, x
3
, t)
_
Ce qui donne pour le cas present (cf 4.2)
_
_
_
11
(x
1
, t) =
u
0
1
x
1
(x
1
, t)
22
=
33
=
21
=
31
=
32
= 0
(4.3)
4.2.2.2 Construction de la fonctionnelle de Hamilton
Pour un materiau isotropique sous etat de contrainte unidimensionnelle, le tenseur delasticite est :
C
ijkl
=
_
_
_
_
_
_
_
_
_
_
_
_
_
E E E
E E E 0
E E E
E
2(1 +)
0
E
2(1 +)
E
2(1 +)
_
_
_
_
_
_
_
_
_
_
_
_
_
(4.4)
Pour rappel, lexpression de la fonctionnelle de Hamilton est :
H(u
i
) =
_
t1
t0
(T V +W)dt (4.5)
avec :
T =
_
v
1
2
_
u
i
t
_
2
dv
V =
_
v
ij
C
ijkl
kl
dv
W =
_
v
f
i
u
i
dv
Compte tenu de 4.2, 4.3 et 4.4 on obtient :
T =
_
l
0
1
2
S
_
u
0
1
t
_
2
dx
1
V =
_
l
0
1
2
ES
_
u
0
1
x
1
_
2
dx
1
W =
_
l
0
f
1
Su
0
1
dx
1
22 Vibrations des poutres
avec
l : longueur de la poutre.
S : surface de la section de la poutre.
f
1
: force axiale ` a labscisse x
1
, par unite de longueur.
En resume, la fonctionnelle de Hamilton pour les vibrations longitudinales de poutres droites minces est :
H(u
0
1
) =
_
t1
t0
_
l
0
_
1
2
S
_
u
0
1
t
_
2
1
2
ES
_
u
0
1
x
1
_
2
+f
1
Su
0
1
_
dx
1
dt (4.6)
La fonctionnelle de Hamilton ne depend que dune seule fonction u
0
1
. Letape suivante consiste ` a chercher
lextremum de H par rapport ` a cette fonction. Cet extremum est le deplacement qui verie les equations de
vibrations longitudinales de la poutre.
Lapproche variationnelle de Hamilton ne necessite pas le calcul explicite des contraintes dans la poutre.
Dans lapproche cinematique, le calcul des contraintes peut poser probl`eme. Interessons nous par exemple ` a la
contrainte
22
:
On a :
ij
= C
ijkl
kl
ie :
_
_
_
_
_
_
_
_
11
22
33
23
13
12
_
_
_
_
_
_
_
_
=
_
_
_
_
_
_
_
_
_
_
_
_
_
E E E
E E E 0
E E E
E
2(1 +)
0
E
2(1 +)
E
2(1 +)
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
11
22
33
2
23
2
13
2
12
_
_
_
_
_
_
_
_
Comme seul
11
est non nul, on obtient
22
= E
11
. La contrainte
22
calculee ` a partir du champ de
deplacement 4.2 est donc non nulle. En particulier,
22
est non nulle sur la surface de la poutre, ce qui est
incompatible avec la physique du probl`eme. On doit donc etre prudent et retenir que la formulation variation-
nelle de Hamilton peut mener ` a des resultats faux pour les contraintes dans le syst`eme. Pour remedier ` a ces
incompatibilites sur les contraintes, on introduit parfois des modications articielles de la loi de comportement
(donnee par le tenseur elastique C
ijkl
). On peut egalement utiliser dautres formulations variationnelles comme
celle de Reissner.
4.2.2.3 Extremalisation de la fonctionnelle de Hamilton
On utilise, ici, directement les resultats lies aux equations dEuler (presente ` a lannexe A.2) pour la fonc-
tionnelle 4.6. Dans le cas de vibrations longitudinales des poutres, on a :
=
1
2
S(u
0
1,t
)
2
1
2
ES(u
0
1,x1
)
2
+ f
1
Su
0
1
Lequation du mouvement et les conditions aux limites generales sont (cf eq. A.6 et A.7) :
Equa. mvt :
u
0
1
t
_
u
0
1,t
_
x
1
_
u
0
1,x1
_
= 0
C. L. :
_
_
u
0
1
(0, t) = 0
ou
u
0
1,x1
(0, t) = 0
et
_
_
u
0
1
(l, t) = 0
ou
u
0
1,x1
(l, t) = 0
En exprimant les fonctions de :
u
0
1
= f
1
S
u
0
1,t
= Su
0
1,t
u
0
1,x1
= ESu
0
1,x1
lequation du mouvement devient :
S
2
u
0
1
t
2
x
1
_
ES
u
0
1
x
1
_
= f
1
S x
1
]0, l[ t (4.7)
Vibrations de exion 23
soit si E et S sont independants de la variable x
1
:
S
2
u
0
1
t
2
ES
2
u
0
1
x
2
1
= f
1
S x
1
]0, l[ t (4.8)
Les conditions limites, sexpriment quant ` a elles, comme :
_
_
u
0
1
(0, t) = 0
ou
ES
u
0
1
x
1
(0, t) = 0
et
_
_
u
0
1
(l, t) = 0
ou
ES
u
0
1
x
1
(l, t) = 0
(4.9)
Les relations 4.9 signient que le probl`eme, tel quil est modelise (en 1D), na de solutions que si certaines
conditions aux extremites sont satisfaites. Les deux premi`eres conditions signient physiquement que les ex-
tremites sont encastrees (deplacement longitudinal impose nul). Les deux derni`eres conditions representent des
extremites libres : leet normal ` a une extremite est impose ` a zero (ES
u
0
1
x
1
= S
11
= 0).
Nota Bene : La celerite des ondes de compression dans la poutre est dapr`es 4.8 :
c =
elle ne depend pas des dimensions de la section de poutre.
4.3 Vibrations de exion
4.3.1 Champ de deplacement
Pour letude du rayonnement acoustique de structures vibrantes, les vibrations de exion sont generalement
les plus importantes, ce sont elles qui, dans la plupart des cas, font du bruit (les vibrations longitudinales
peuvent egalement produire un rayonnement acoustique par le biais de leet de Poisson - il faut alors le
prendre en compte dans la modelisation).
En repartant de lexpression generale du champ de deplacement lineaire (sans les termes dordre strictement
superieurs ` a 1), 4.1, on emet de nouvelles hypoth`eses en considerant lexcitation. Lexcitation est maintenant
une force agissant dans le plan (1,2) qui va induire un deplacement privilegie suivant laxe 2. Le champ de
deplacement pour la exion des poutres est :
_
_
_
u
1
(x
1
, x
2
, x
3
, t) x
2
u
2
1
(x
1
, t)
u
2
(x
1
, x
2
, x
3
, t) u
0
2
(x
1
, t) w(x
1
, t)
u
3
(x
1
, x
2
, x
3
, t) 0
(4.10)
Ce champ de deplacement (4.10) correspond aux hypoth`eses de Timoshenko. Deux fonctions cinematiques
sont inconnues : la `eche w et la rotation des sections droites u
2
1
. Plus simplement, la description de Ber-
noulli fait lhypoth`ese supplementaire que les sections droites restent perpendiculaires ` a laxe neutre apr`es la
deformation, ce qui impose :
w
x
1
(x
1
, t) =
u
1
x
2
(x
1
, t)
Les hypoth`eses de Bernoulli conduisent au champ de deplacement :
_
_
u
1
(x
1
, x
2
, x
3
, t) x
2
w
x
1
(x
1
, t)
u
2
(x
1
, x
2
, x
3
, t) w(x
1
, t)
u
3
(x
1
, x
2
, x
3
, t) 0
(4.11)
Lhypoth`ese de Bernoulli (dont le champ de deplacement ne poss`ede plus quune fonction inconnue : w)
revient ` a negliger le cisaillement transversal
12
des sections droites. Cette hypoth`ese est legitime pour un
materiau homog`ene et pour les premiers modes de vibration.
24 Vibrations des poutres
x
2
1
x w( ,t)
x
2
u
1
2
2
1
fibre neutre
4.3.2 Fonctionnelle de Hamilton
4.3.2.1 Calculs des deformations
A partir du champ de deplacement 4.11 et de la relation :
ij
=
1
2
_
u
i,j
(x
1
, x
2
, x
3
, t) +u
j,i
(x
1
, x
2
, x
3
, t)
_
on calcule le champ de deformations :
_
_
_
11
=
u
1
x
1
= x
2
2
w
x
2
1
(x
1
, t)
22
=
33
=
12
=
13
=
23
= 0
4.3.2.2 Construction de la fonctionnelle de Hamilton
H(u
i
) =
_
t1
t0
(T V +W)dt
avec :
T =
_
v
1
2
_
u
i
t
_
2
dv
V =
_
v
ij
C
ijkl
kl
dv
W =
_
v
f
i
u
i
dv
Dans le cas de la exion, ces expressions deviennent :
T =
_
l
0
_
h/2
h/2
_
b/2
b/2
1
2
_
x
2
2
_
2
w
x
1
t
_
2
+
_
w
t
_
2 _
dx
3
dx
2
dx
1
=
_
l
0
_
1
2
I
3
_
2
w
x
1
t
_
2
+
1
2
S
_
w
t
_
2 _
dx
1
(4.12)
o` u
I
3
=
_
h/2
h/2
_
b/2
b/2
x
2
2
dx
2
dx
3
(4.13)
Vibrations de exion 25
I
3
est le moment quadratique de section de la poutre par rapport ` a laxe 3. Le premier terme de 4.12
represente donc lenergie cinetique due ` a la rotation des sections droites par rapport ` a laxe neutre. Le deuxi`eme
terme represente, quant ` a lui, lenergie cinetique due au deplacement transversal des sections.
V =
_
l
0
_
h/2
h/2
_
b/2
b/2
1
2
E
2
11
(x
1
, t)dx
3
dx
2
dx
1
=
_
l
0
_
h/2
h/2
_
b/2
b/2
1
2
E
_
x
2
2
w
x
2
1
(x
1
, t)
_
2
dx
3
dx
2
dx
1
=
_
l
0
1
2
EI
3
_
2
w
x
2
1
_
2
dx
1
W =
_
l
0
_
h/2
h/2
_
b/2
b/2
_
f
2
w +m
3
w
x
1
_
dx
3
dx
2
dx
1
=
_
l
0
_
F
2
w +M
3
w
x
1
_
dx
1
avec :
m
3
= f
1
x
2
f
1
, f
2
: forces par unite de volume
M
3
=
_
h/2
h/2
_
b/2
b/2
f
1
x
2
dx
3
dx
2
moment par unite de longueur
F
2
=
_
h/2
h/2
_
b/2
b/2
f
2
dx
3
dx
2
force par unite de longueur
F
2
et la resultante de la force suivant laxe 2, sur la section droite. M
3
est le moment resultant sur la section
droite par rapport ` a laxe 3.
En resume, la fonctionnelle de Hamilton pour la exion de poutres droites minces (hypoth`eses de Bernoulli)
est :
H(w) =
_
t1
t0
_
l
0
_
1
2
I
3
_
2
w
x
1
t
_
2
+
1
2
S
_
w
t
_
2
1
2
EI
3
_
2
w
x
2
1
_
2
+F
2
w +M
3
w
x
1
_
dx
1
dt
On fait generalement une hypoth`ese supplementaire, pour les poutres minces, qui consiste ` a negliger lenergie
cinetique due ` a la rotation des sections droites devant lenergie cinetique due au mouvement de deplacement
transversal : le terme dinertie I
3
est en eet proportionnel ` a h
3
, alors que la surface S est proportionnelle ` a h.
Cette hypoth`ese est surtout valable pour les premiers modes de exion. On peut donc retenir :
H(w) =
_
t1
t0
_
l
0
_
1
2
S
_
w
t
_
2
1
2
EI
3
_
2
w
x
2
1
_
2
+F
2
w +M
3
w
x
1
_
dx
1
dt
4.3.2.3 Extremalisation de la fonctionnelle de Hamilton
Pour cette etape du calcul, on peut se reporter aux resultats de lannexe A.2 en remarquant que la fonction-
nelle est de la forme :
H(w) =
_
t1
t0
_
l
0
(w, w
,t
, w
,x
, w
,xt
, w
,xx
, w
,tt
)dxdt
les termes w
,xt
et w
,tt
napparaissant pas dans lexpression simpliee de la fonctionnelle. Les equations du
mouvement et les conditions aux limites fournies par les equations dEuler dans le cas present secrivent :
Equa. mvt :
w
t
_
w
,t
_
x
_
w
,x
_
+
2
x
2
_
w
,xx
_
= 0
Conditions aux limites pour x = 0 et x = l :
_
_
w = 0
ou
w
,x
x
_
w
,xx
_
= 0
et
_
_
w
,x
= 0
ou
w
,xx
= 0
26 Vibrations des poutres
Ce qui nous donne :
S
2
w
t
2
+
2
x
2
1
_
EI
3
2
w
x
2
1
_
= F
2
M
3
x
1
(4.14)
et les conditions limites pour x
1
= 0 et x
1
= l :
_
_
w = 0
ou
M
3
+
x
1
_
EI
3
2
w
x
2
1
_
= 0
et
_
_
w
,x1
= 0
ou
EI
3
2
w
x
2
1
= 0
(4.15)
Comme dans le cas des vibrations longitudinales, les conditions aux limites signient que le probl`eme pose
na de solutions analytiques qu` a certaines conditions. Nous pouvons interpr`eter physiquement ces conditions
comme :
w = 0 et
w
x
1
= 0 : condition dencastrement.
w = 0 et EI
3
2
w
x
2
1
= 0 : condition dappui simple.
En eet, EI
3
2
w
x
2
1
= M
3
est moment de exion de la section.
x
1
_
EI
3
2
w
x
2
1
_
= 0 et EI
3
2
w
x
2
1
= 0 : extremite libre.
En eet,
x
1
_
EI
3
2
w
x
2
1
_
= F
2
represente leort tranchant applique ` a la section.
M
3
+
x
1
_
EI
3
2
w
x
2
1
_
= 0 et
w
x
1
= 0 : extremite guidee.
Cette condition na pas vraiment de realite physique.
Les conditions w = 0 et
w
x
1
= 0 sont des conditions aux limites cinematiques (en deplacement).
Les conditions EI
3
2
w
x
2
1
= 0 et
x
1
_
EI
3
2
w
x
2
1
_
= 0 sont des conditions aux limites dynamiques (en
contraintes).
4.4 Vibrations de torsion
4.4.1 Champ de deplacement
3
l
1
2
M
1
3
2
On traite ici la torsion dans le cas simple dune section droite circulaire. On suppose que lexcitation est un
moment autour de laxe 1 qui est aussi laxe neutre de la poutre. Le deplacement dominant dans la torsion est
la rotation des sections droites. Si (x
1
, t) est le deplacement angulaire de la section droite dabscisse x
1
, on
utilise le champ de deplacement simplie (hypoth`ese de S
t
Venant) suivant :
_
_
_
u
1
(x
1
, x
2
, x
3
, t) 0
u
2
(x
1
, x
2
, x
3
, t) x
3
(x
1
, t)
u
3
(x
1
, x
2
, x
3
, t) x
2
(x
1
, t)
(4.16)
La seule fonction cinematique inconnue est langle (x
1
, t).
Vibrations de torsion 27
4.4.2 Fonctionnelle de Hamilton
4.4.2.1 Calculs des deformations
_
_
_
11
=
22
=
33
=
23
12
=
1
2
x
3
x
1
13
=
1
2
x
2
x
1
4.4.2.2 Construction de la fonctionnelle de Hamilton
H() =
_
t1
t0
_
l
0
_
1
2
I
1
_
t
_
2
1
2
GI
1
_
x
1
_
2
+M
1
_
dx
1
dt
o` u
I
1
=
_
S
(x
2
2
+x
2
3
)dx
2
dx
3
designe le moment quadratique de la section circulaire par rapport ` a laxe 1
4.4.2.3 Extremalisation de la fonctionnelle de Hamilton
La fonctionnelle de Hamilton pour les vibrations de torsion a la meme forme generale que la fonctionnelle
de Hamilton pour les vibrations longitudinales. Lequation du mouvement et les conditions limites doivent donc
avoir les memes formes dans les deux cas.
Equation du mouvement :
I
1
t
2
x
1
_
GI
1
x
1
_
= M
1
x
1
]0, l[ t (4.17)
o` u G =
E
2(1 +)
est le module de cisaillement du materiau.
Conditions limites en x
1
= 0 et x
1
= l :
_
_
(0, t) = 0
ou
GI
1
x
1
(0, t) = 0
et
_
_
(l, t) = 0
ou
GI
1
x
1
(l, t) = 0
(4.18)
La condition = 0 est une condition dencastrement, la condition GI
1
x
1
= 0 (moment de torsion nul ) est
une condition dextremite libre.
Nota Bene : Si on sinteresse ` a la contrainte sur la surface de la poutre, on a :
_
_
_
_
_
_
_
_
11
22
33
23
13
12
_
_
_
_
_
_
_
_
=
_
_
_
_
_
_
_
_
_
_
_
_
_
E E E
E E E 0
E E E
E
2(1 +)
0
E
2(1 +)
E
2(1 +)
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
0
0
0
x
3
,x1
x
2
,x1
0
_
_
_
_
_
_
_
_
Les seules composantes non nulles du tenseur des contraintes sont :
21
= Gx
3
,x1
31
= Gx
2
,x1
On constate facilement quen tout point M de la section droite, la contrainte resultante est perpendiculaire
au rayon OM (et proportionnelle ` a la distance OM). En particulier, pour un point P ` a la surface libre de la
poutre, la contrainte est purement tangentielle. La contrainte normale est nulle ` a la surface du corps, ce qui est
compatible avec la physique du probl`eme. Or, pour une section droite circulaire, le champ de deplacement viole
la condition de contrainte normale nulle ` a la surface du materiau. Pour les situations o` u la section droite nest pas
28 Vibrations des poutres
M
2
3
P
M
O
P
circulaire ou annulaire, il faut utiliser un champ de deplacement dierent pour la torsion; le probl`eme devient
alors beaucoup plus complique, faisant apparatre un terme de deplacement longitudinal u
1
qui represente le
gauchissement de la section droite (ex : gomme ` a eacer).
Bibliographie
M. Geradin, D. Rixen, Theorie des vibrations, Masson, 1996
D.J. Inman, Engineering vibration, Prentice-Hall, 1996
S.S. Rao, Mechanical vibration, Addison-Wesley, 1995
5 Vibrations des plaques
Ce chapitre presente essentiellement les vibrations de exion des plaques. Il fait appel ` a des notions introduites
dans le chapitre concernant les vibrations de poutres.
5.1 Denition dune plaque
On nomme plaque un milieu continu ayant une dimension tr`es petite par rapport aux deux autres.
F
3
1
3
2
h
b
a
Fig. 5.1 Representation dune plaque dans le rep`ere (0, 1, 2, 3)
On suppose que le plan neutre de la plaque est contenu dans le plan (1, 2).
On note (x
1
, x
2
, x
3
) les coordonnees, dans le rep`ere (0, 1, 2, 3), dun point M de la plaque dont on cherche ` a
exprimer le champ de deplacement u
i
(M, t).
u
i
(M, t)
_
_
_
u
1
(x
1
, x
2
, x
3
, t)
u
2
(x
1
, x
2
, x
3
, t)
u
3
(x
1
, x
2
, x
3
, t)
Tout comme dans le cas de la poutre, nous allons etre amene ` a faire des hypoth`eses de condensation, liees
uniquement ` a la geometrie plane consideree pour simplier le champ de deplacement et les calculs.
5.2 Hypoth`eses de condensation
Les hypoth`eses de condensation pour les plaques consistent ` a eectuer un developpement en serie de Taylor
de u
i
(x
1
, x
2
; x
3
, t) par rapport ` a x
3
(qui varie, ici, de h/2 ` a +h/2) :
u
i
(x
1
, x
2
, x
3
, t) = u
i
(x
1
, x
2
, 0, t) +x
3
u
i
x
3
(x
1
, x
2
, 0, t) +
x
2
3
2
2
u
i
x
2
3
(x
1
, x
2
, 0, t)
+ +
x
n
3
n!
n
u
i
x
n
3
(x
1
, x
2
, 0, t) +
En negligeant les termes dordre superieur ou egal ` a 2, on a :
u
i
(x
1
, x
2
, x
3
, t) u
i
(x
1
, x
2
, 0, t) +x
3
u
i
x
3
(x
1
, x
2
, 0, t)
30 Vibrations des plaques
que lon notera :
u
i
(x
1
, x
2
, x
3
, t) u
0
i
(x
1
, x
2
, t) +x
3
u
3
i
(x
1
, x
2
, t)
Les hypoth`eses de condensation des plaques minces sont donc :
_
_
_
u
1
(x
1
, x
2
, x
3
, t) u
0
1
(x
1
, x
2
, t) +x
3
u
3
1
(x
1
, x
2
, t)
u
2
(x
1
, x
2
, x
3
, t) u
0
2
(x
1
, x
2
, t) +x
3
u
3
2
(x
1
, x
2
, t)
u
3
(x
1
, x
2
, x
3
, t) u
0
3
(x
1
, x
2
, t) +x
3
u
3
3
(x
1
, x
2
, t)
(5.1)
Les deplacements dans le plan de plaque u
1
et u
2
sont la superposition de deplacements densemble de la
section droite (u
0
1
et u
0
2
) et de rotations de la section droite par rapport ` a la bre neutre (x
3
u
3
1
et x
3
u
3
2
).
u
1
0
x u
1
3
3
x
3
1
3
x
3
3
2
u
0
x u
3
3 2 2
Dans la theorie des plaques minces, les sections droites restent donc droites apr`es deformation.
Pour le deplacement transverse u
3
, on neglige ses variations dans lepaisseur de la plaque : Le deplacement
transverse est donc constant pour chaque section droite :
u
3
(x
1
, x
2
, x
3
, t) = u
0
3
(x
1
, x
2
, t)
do` u :
_
_
_
u
1
(x
1
, x
2
, x
3
, t) u
0
1
(x
1
, x
2
, t) +x
3
u
3
1
(x
1
, x
2
, t)
u
2
(x
1
, x
2
, x
3
, t) u
0
2
(x
1
, x
2
, t) +x
3
u
3
2
(x
1
, x
2
, t)
u
3
(x
1
, x
2
, x
3
, t) u
0
3
(x
1
, x
2
, t)
5.3 Vibrations longitudinales des plaques minces
Si lexcitation est dans le plan de la plaque, les mouvements privilegies ont egalement lieu dans le plaque de
la plaque (u
1
, u
2
). On denit ainsi le champ de deplacement correspondant aux hypoth`eses de mouvement de
membrane de la plaque :
_
_
_
u
1
(x
1
, x
2
, x
3
, t) u
0
1
(x
1
, x
2
, t) +x
3
u
3
1
(x
1
, x
2
, t)
u
2
(x
1
, x
2
, x
3
, t) u
0
2
(x
1
, x
2
, t) +x
3
u
3
2
(x
1
, x
2
, t)
u
3
(x
1
, x
2
, x
3
, t) 0
Ce mouvement, peu rencontre ou exploite, seul, ne sera pas etudie davantage.
5.4 Vibrations de exion des plaques minces
5.4.1 Champ de deplacement
Si lexcitation est normale au plan de la plaque (cf g. 5.1), le mouvement privilegie est la exion (transverse
au plan de la plaque). Le champ de deplacement est alors :
_
_
_
u
1
(x
1
, x
2
, x
3
, t) x
3
u
3
1
(x
1
, x
2
, t)
u
2
(x
1
, x
2
, x
3
, t) x
3
u
3
2
(x
1
, x
2
, t)
u
3
(x
1
, x
2
, x
3
, t) u
0
3
(x
1
, x
2
, t)
La exion, dans le cas general, est denie par 3 fonctions independantes : u
0
3
, u
3
1
et u
3
2
des variables x
1
, x
2
et du
temps t. On peut, comme dans le cas des poutres droites minces, introduire des simplications supplementaires
en imposant dautres hypoth`eses sur les fonctions u
3
1
et u
3
2
. Ce sont les hypoth`eses de Love-Kirchhoff. Ces
hypoth`eses indiquent que les sections droites deformees doivent rester normales au plan neutre de la plaque.
Vibrations de exion des plaques minces 31
3
u
0
x
3
u
1
0
3
1
M
plan neutre av. dform.
plan neutre
aprs dform.
Ceci impose :
_
_
u
3
1
(x
1
, x
2
, t) =
u
0
3
x
1
(x
1
, x
2
, t)
u
3
2
(x
1
, x
2
, t) =
u
0
3
x
2
(x
1
, x
2
, t)
Le champ de deplacement des plaques minces sous les hypoth`eses de Love-Kirchho secrit donc :
_
_
u
1
(x
1
, x
2
, x
3
, t) x
3
u
0
3
x
1
(x
1
, x
2
, t)
u
2
(x
1
, x
2
, x
3
, t) x
3
u
0
3
x
2
(x
1
, x
2
, t)
u
3
(x
1
, x
2
, x
3
, t) u
0
3
(x
1
, x
2
, t)
(5.2)
Cette exion pure nest alors decrite que par une fonction inconnue : u
0
3
(x
1
, x
2
, t).
Nota Bene : Dapr`es lequation 5.2 :
31
=
1
2
(u
3,1
+u
1,3
) =
1
2
_
u
0
3
x
1
u
0
3
x
1
_
= 0
32
=
1
2
(u
3,2
+u
2,3
) =
1
2
_
u
0
3
x
2
u
0
3
x
2
_
= 0
Les hypoth`eses de Love-Kirchho reviennent ` a negliger le cisaillement transversal dans la plaque. Comme par
ailleurs
33
= (u
0
3
)/(x
3
) = 0, seules les composantes
11
,
22
,
21
du tenseur des deformations sont non nulles.
Les hypoth`eses de Love-Kirchho sont donc celles dun etat de deformation plane dans le materiau.
5.4.2 Fonctionnelle de Hamilton
5.4.2.1 Calculs des deformations
A partir de lequation 5.2, on determine les deformations de la plaque :
_
11
=
u
1
x
1
= x
3
2
u
0
3
x
2
1
22
=
u
2
x
2
= x
3
2
u
0
3
x
2
2
21
=
1
2
_
u
1
x
2
+
u
2
x
1
_
= x
3
2
u
0
3
x
1
x
2
31
=
32
=
33
= 0
5.4.2.2 Construction de la fonctionnelle de Hamilton
On reprend la forme generale de la fonctionnelle :
H(u
0
3
) =
_
t1
t0
(T V +W)dt
32 Vibrations des plaques
Lenergie cinetique du syst`eme sexprime ici comme :
T =
_
v
1
2
_
u
i
t
_
2
dv
=
_
s
_
1
2
h
_
w
t
_
2
+
1
2
h
3
12
_
_
2
w
x
1
t
_
2
+
_
2
w
x
2
t
_
2
__
dx
1
dx
2
expression dans laquelle le deplacement transverse u
0
3
est remplace par la notation w, souvent utilise pour desi-
gner la `eche du deplacement.
Pour rappel lenergie potentielle secrit :
V =
_
v
ij
C
ijkl
kl
dv
Si lon adopte une loi de comportement de type materiau isotrope sous etat de contraintes planes, le tenseur
des coecients elastiques secrit :
C
ijkl
=
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
E
1
2
E
1
2
E
1
2
E
1
2
E
1
2
E
1
2
0
E
1
2
E
1
2
E
1
2
E
2(1 +)
0
E
2(1 +)
E
2(1 +)
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
_
(5.3)
En tenant compte du fait que
31
,
32
,
33
= 0, et en tenant compte des proprietes de symetrie de
ij
et
C
ijkl
, on a :
V =
_
v
_
1
2
C
1111
2
11
+
1
2
C
2222
2
22
+ 2
1
2
C
2121
2
21
+
11
C
1122
22
_
=
_
s
1
2
Eh
3
12(1
2
)
_
_
2
w
x
2
1
_
2
+
_
2
w
x
2
2
_
2
+ 2
2
w
x
2
1
2
w
x
2
1
+ 2(1 )
_
2
w
x
1
x
2
_
2
_
dx
1
dx
2
La somme W des travaux des forces exterieures secrit quant ` a elle comme :
W =
_
s
F
3
wdx
1
dx
2
o` u F
3
est la force transverse appliquee par unite de surface sur la plaque (on suppose ici labsence de moment
de exion applique).
En resume, la fonctionnelle de Hamilton pour la exion des plaques minces, secrit sous les hypoth`eses de
Love-Kirchho :
H(w) =
_
t1
t0
_
1
2
h
_
w
t
_
2
+
1
2
h
3
12
_
_
2
w
x
1
t
_
2
+
_
2
w
x
2
t
_
2
_
. .
termes dinertie rotationnelle
1
2
Eh
3
12(1
2
)
_
_
2
w
x
2
1
_
2
+
_
2
w
x
2
2
_
2
+ 2
2
w
x
2
1
2
w
x
2
1
+ 2(1 )
_
2
w
x
1
x
2
_
2
_
+ F
3
w
_
dx
1
dx
2
dt (5.4)
On fera par la suite une hypoth`ese supplementaire pour les plaques minces qui consiste ` a negliger linertie
rotationnelle dans lenergie cinetique. Cette hypoth`ese est valide pour les premiers modes de exion.
Vibrations de exion des plaques minces 33
5.4.2.3 Extremalisation de la fonctionnelle de Hamilton
Lextremalisation de la fonctionnelle de Hamilton peut, une fois de plus, se faire ` a partir du calcul de la
derivee au sens de Gateau (cest un bon exercice) ou en utilisant les resultats dEuler (A.2) en remarquant que
la fonctionnelle 5.4 est de la forme generale :
H(w) =
_
t1
t0
_
s
(w, w
,x1
, w
,x2
, w
,t
, w
,x1x1
, w
,x2x2
, w
,x1x2
, w
,x1t
, w
,x2t
, w
,tt
)dx
1
dx
2
dt
Les termes w
,x1
, w
,x2
et w
,tt
napparaissent pas dans la fonctionnelle 5.4 ; ni les termes w
,x1t
et w
,x2t
si
linertie rotationnelle est negligee dans lexpression de lenergie cinetique totale. Lequation du mouvement et
les conditions limites donnees par les equations dEuler sont alors :
Equation du mouvement :
w
t
w
,t
+
2
x
2
1
w
,x1x1
+
2
x
2
2
w
,x2x2
+
2
x
1
x
2
w
,x1x2
= 0 t ]t
0
, t
1
[ (x
1
, x
2
) s
Conditions aux limites :
_
_
soit w(x
1
, x
2
, t) = 0
soit
_
w
,x1
x
1
w
,x1x1
x
2
w
,x1x2
_
n
1
+
_
w
,x2
x
2
w
,x2x2
x
1
w
,x2x1
_
n
2
= 0
sur la fronti`ere et t ]t
0
, t
1
[
et
_
_
_
soit w
,n
(x
1
, x
2
, t) = 0
soit
w
,x1x1
n
2
1
+
w
,x2x2
n
2
2
+
w
,x1x2
n
1
n
2
= 0
sur la fronti`ere et t ]t
0
, t
1
[
Ce qui donne, compte tenu de lexpression de dans notre cas present :
Equation du mouvement :
F
3
h
2
w
t
2
Eh
3
12(1
2
)
_
4
x
4
1
+ 2
4
x
2
1
x
2
2
+
4
x
4
2
_
w = 0 t ]t
0
, t
1
[ (x
1
, x
2
) s (5.5)
Nota Bene : Dans la litterature, on trouve souvent les notations suivantes :
= h masse surfacique [kg.m
2
]
D =
_
h/2
h/2
E
1
2
x
2
3
dx
3
=
Eh
3
12(1
2
)
rigidite de exion [N.m]
4
w = (w) =
_
4
x
4
1
+ 2
4
x
2
1
x
2
2
+
4
x
4
2
_
operateur bi-laplacien
Avec ces notations, lequation du mouvement 5.5 se re-ecrit :
F
3
2
w
t
2
D
4
w = 0
Remarque : la valeur de D depend du rep`ere choisi par les bornes dintegration (cf gure 5.1).
Conditions aux limites :
_
soit w = 0
soit
_
w
,x1x1x1
+ (2 )w
,x1x2x2
_
n
1
+
_
w
,x2x2x2
+ (2 )w
,x1x1x2
_
n
2
= 0
et
_
soit w
,n
= 0
soit w
,x1x1
+w
,x2x2
+ (1 )
_
w
,x2x2
n
2
1
w
,x1x1
n
2
2
+ 2w
,x1x2
n
1
n
2
_
= 0
34 Vibrations des plaques
Une fois de plus, les conditions limites signient que les hypoth`eses de deplacement faites conduisent ` a la
construction dune fonctionnelle de Hamilton qui na de solutions physiques que si ces conditions sont veriees
en tout point du contour de la plaque. Les conditions aux limites sont complexes ` a traduire en pratique. On
ne traite donc analytiquement que des cas de geometries simples : plaques rectangulaires ou circulaires.
5.4.2.4 Interpretation des conditions limites dans le cas dune plaque rectangulaire
Linterpretation qui suit est donnee pour un point quelconque du perim`etre x
1
= a, dans le cas dune plaque
rectangulaire. le vecteur n a alors pour composantes : (1,0). Les trois autres bords de cette plaque rectangulaire
presentent chacun 4 relations de conditions limites similaires.
w(a, x
2
) = 0 et
w
x
2
(a, x
2
) = 0
Deplacement et pente nuls sur le bord x
1
= a : condition dencastrement.
w(a, x
2
) = 0 et
2
w
x
2
1
(a, x
2
) +
2
w
x
2
2
(a, x
2
) = 0
La premi`ere condition w(a, x
2
) = 0 impose pour la seconde la forme :
2
w
x
2
1
(a, x
2
) = 0. Le terme
2
w
x
2
1
(a, x
2
) est
proportionnel au moment de exion sur le bord x
1
= a de la plaque. Cette condition de deplacement nul et de
moment de exion nul traduit une condition dappui simple.
2
w
x
2
1
(a, x
2
) +
2
w
x
2
2
(a, x
2
) = 0 et
3
w
x
3
1
(a, x
2
) + (2 )
3
w
x
1
x
2
2
(a, x
2
) = 0
Ces conditions traduisent respectivement un moment de exion nul et un eort tranchant nul sur le bord x
1
= a
de la plaque. Cette condition est une condition de bord libre.
w
x
2
(a, x
2
) = 0 et
3
w
x
3
1
(a, x
2
) + (2 )
3
w
x
1
x
2
2
(a, x
2
) = 0
La premi`ere condition impose pour la seconde la forme
3
w
x
3
1
(a, x
2
) = 0. Ces deux conditions traduisent une
pente nulle et un eort tranchant nul sur le bord x
1
= a de la plaque. Il sagit dune condition de glissement.
Bibliographie
R. D. Blevins, Formulas for natural frequency and mode shapes, Krieger, 2001
J.-L. Guyader, Vibrations des milieux continus, Hermes, 2002
A. Leissa, Vibration of plates, Acoustical Society of America, 1993
K.M. Liew, C.M. Wang, Y. Xiang et S. Kitiporchai, Vibration of Mindlin plates - programming the p-version
Ritz Method, Elsevier, 1998
Y.Y. Yu, Vibrations of elastic plates : linear and nonlinear dynamical modelling of sandwiches, laminated com-
posites, and piezoelectric layer, Springer, 1996
6 Introduction `a lanalyse modale
Ce chapitre presente les fondements de lanalyse modale. Il est davantage con cu comme un formulaire plus
quun cours ` a proprement dit et fait appel ` a des notions introduites ou rappelees dans les etudes precedentes (1
et n degre(s) de liberte).
6.1 Denition de lanalyse modale
Lanalyse modale permet detablir un mod`ele du comportement vibratoire dune structure en basses fre-
quences. En identiant par la mesure, les frequences, vecteurs propres et amortissements modaux dun syst`eme,
on peut construire un mod`ele analytique qui pourra etre employe en simulation pour connatre le comportement
dynamique de ce syst`eme dans dautres cas pratiques. En moyennes et hautes frequences la densite de mode
devient trop importante pour que cette methode soit applicable. Ces considerations de moyennes et hautes fre-
quences dependent du probl`eme etudie : pour une simple poutre ou plaque, le domaine dutilisation de lanalyse
modale est beaucoup plus large que dans le cas dune voiture ou dun bateau par exemple.
Basses
Frquences
F
frquence
Hautes
Frquences
Moyennes
Frquences
A
Lanalyse modale experimentale est basee sur quelques hypoth`eses :
Le syst`eme est lineaire dans la gamme des amplitudes etudiees.
Le syst`eme, sil est continu, peut se representer par un syst`eme discret o` u les param`etres sont exprimes
pour chaque noeud du maillage (nb de degre de liberte total = nb de noeuds nb de ddl par noeud).
Lamortissement est suppose proportionnel.
Sur lexemple de la gure 6.1, les mesures de Fonction de Reponse en Frequence (FRF - rapport de lac-
celeration au point 1 sur la force au point 2 par exemple), vont permettrent de determiner les param`etres du
syst`eme mecanique : frequences et modes propres pour chaque resonance ainsi que les amortissements qui leur
sont associes. Ces informations sont utiles ` a lidentication et au traitement des modes de vibration genants de
la porti`ere lorsque la voiture roule par exemple.
6.2 Theor`eme de reciprocite
Ce theor`eme de reciprocite est fondamental dans le sens ou il permet dobtenir les memes FRF dans les deux
cas suivant :
Point de force en 2, point dobservation en 1.
Point dobservation en 2, point de force en 1.
A
1
()
F
2
()
=
A
2
()
F
1
()
36 Introduction ` a lanalyse modale
dimpact
2
1
marteau
acclro.
Fig. 6.1 Maillage dune porti`ere avant etude modale
) (
) (
) (
) (
F
F
1
2
A
2
1
A
Fig. 6.2 Illustration du theor`eme de reciprocite
Ainsi, dans le cas de la porti`ere de voiture, deplacer le point dimpact sur le maillage en gardant un point de
mesure de lacceleration xe ou deplacer laccelerom`etre sur le maillage en gardant le point dimpact xe nous
fournira la meme information utile.
6.3 Dierentes formes de FRF
Dautres Fonctions de Reponse en Frequence que le rapport acceleration sur force peuvent etre utilisees.
Dans le tableau ci-dessous sont repertoriees quelques unes des FRF les plus courantes :
Deplacement X H =
X
F
Souplesse dynamique H =
F
X
Raideur dynamique
Compliance dynamique Dynamic stiness
Receptance
Dynamic compliance
Vitesse V H =
V
F
Mobilite H =
F
V
Impedance
Mobility Impedance
Acceleration A H =
A
F
Accelerance H =
F
A
Masse eective
Inertance Eective mass
Accelerance
6.4 Estimateurs de FRF
On ne mesure generalement jamais le rapport x(t), signal dentree, sur y(t), signal de sortie, sans traitement
numerique prealable. Ce traitement numerique permet de limiter le bruit sur la mesure.
Amortissements visqueux et structural 37
Les signaux sur lequels se porte lanalyse sont dits des estimateurs des fonctions de reponse en frequence :
H
1
(f) =
Y X
X X
H
2
(f) =
Y Y
X Y
H
1
(f) =
1
T
_
1
n
n
i=1
X
i
Y
i
_
1
T
_
1
n
n
i=1
X
i
X
i
_ =
S
xy
S
xx
H
2
(f) =
1
T
_
1
n
n
i=1
Y
i
Y
i
_
1
T
_
1
n
n
i=1
Y
i
X
i
_ =
S
yy
S
yx
o` u T est la periode du signal, n son nombre dechantillons et S
xy
designe linterspectre des signaux X(t) et Y (t).
H
2
est le meilleur estimateur aux resonances : il annule le bruit ` a lentree et est moins sensibles aux fuites
spectrales (leakage, probl`eme inherent au traitement du signal).
En revanche, H
1
est le meilleur estimateur aux anti-resonances, le probl`eme dominant etant le bruit de
sortie.
Pour des excitations par impacts ou pseudo-aleatoires, H
1
et H
2
sont generalement equivalents aux reso-
nances. H
1
est cependant le meilleur estimateur aux anti-resonances.
En general, pour un bruit blanc en entree, H
1
et H
2
forment les limites de conance de la vraie valeur H :
H
1
H H
2
Cette inegalite nest pas valable pour les fuites spectrales non lineaires ou pour les bruits coherents ` a lentree
et ` a la sortie tels que les ronements dus au secteur.
On denit parfois un troisi`eme estimateur, H
3
, moyenne des deux premiers estimateurs.
6.5 Amortissements visqueux et structural
Deux formes damortissement sont couramment rencontrees en pratique : lamortissement visqueux, , dont
on a largement discute dans le premier chapitre et lamortissement structural (ou hysteretique), , dependant
de la nature du materiau subissant leort.
Compte tenu de la nature de lamortissement structural, sa prise en compte se fait par la denition dune
raideur complexe K :
K = K(1 +j)
Comme pour lamortissement visqueux, lamortissement structural est en quadrature de phase avec le de-
placement (terme multiplie par j).
On peut etablir la comparaison suivante entre les deux types damortissement :
38 Introduction ` a lanalyse modale
Bilan des forces Bilan des forces
[M
2
+K +jC]Xe
jt
= Fe
jt
[M
2
+K(1 +j)]Xe
jt
= Fe
jt
Souplesse dynamique (ou Receptance) Souplesse dynamique (ou Receptance)
H() =
X
F
=
1
(K M
2
) +jC
H() =
X
F
=
1
(K M
2
) +jK
H()K =
X
F
K =
1
(1 r
2
) +j2r
H()K =
X
F
K =
1
(1 r
2
) +jr
o` u, r = /
n
et o` u les termes en gras, du tableau ci dessus, representent des nombres complexes.
Lamortissement contr ole lamplitude ` a la resonance ( =
r
), car ` a la resonance :
H(
r
)K =
X
F
K =
1
j2
Pour deux syst`emes ayant comme seule dierence le type damortissement et en considerant des amplitudes
egales ` a la resonance, on montre que lamortissement structural est egal ` a deux fois lamortissement visqueux :
= 2
6.6 Methodes dextraction de param`etres
Les identications de la frequence de resonance et de lamortissement peuvent etre faites, de fa con simple
mais avec de nombreuses hypoth`eses, par la methode du pic damplitude (cf g. 6.3)
On peut verier, qu` a la resonance, on observe pour tous types de FRF :
un maximum damplitude
un passage ` a zero de partie reelle
un maximum de la partie imaginaire
Une fois la pulsation (ou la frequence) de resonance
r
determinee, par son maximum damplitude A
max
, on
recherche les pulsations
1
et
2
pour lesquelles les amplitudes du module de la FRF sont A
max
/
2. =
2
-
1
est appelee la bande passante ` a -3 dB.
Dans le cas dun syst`eme ` a 1 ddl ou dun syst`eme ` a n ddl pour lequel linuence des autres resonances est
negligeable sur le comportement de la resonance observee, lamortissement se met sous la forme :
= 2 =
2
2
2
1
2
r
que lon peut simplier dans le cas dun amortissement faible (, 1)
= 2
2
r
= 2
Nota Bene :
Le calcul ` a -3 dB peut facilement se generaliser ` a -n dB.
La methode presentee est en pratique tr`es peu rigoureuse pour un syst`eme ` a n ddl (en raison des hypoth`eses
faites). Dautres methodes plus elaborees comme letude du cercle dans le plan de Nyquist au voisinage
dune resonance (circle tting) ou des methodes considerant linuence des autres resonances MDOF
curve tting lui sont preferees (cf [1,4]).
Exemple : cas dune poutre en exion 39
A
max
2
max
A
2 1
F
r
A
Fig. 6.3 Zoom sur une resonance, methode du pic damplitude
6.7 Exemple : cas dune poutre en exion
On prend ici lexemple simple dune poutre daluminium encastree-libre en exion (Fig. 6.4). Les proprietes
de la poutre ainsi que ses dimensions sont repertoriees ` a la table 6.1. On choisi de recuperer les accelerations en
3 points de cette poutre. Une excitation au point 1 et la mesure des accelerations nous permet de construire 3
FRF.
vibrant
pot
acclro. 1
acclro. 2
acclro. 3
l
b
Fig. 6.4 Schema du dispositif experimental
Module dYoung Masse volumique Longueur l largeur b epaisseur h
70 GPa 2740 kg.m
3
0.250 m 0.015 m 0.005 m
Tab. 6.1 Proprietes et dimensions de la poutre.
Obtention des FRF
Les gures 6.5 et 6.6 presentent les 5 premi`eres resonances de la poutre (qui en tant que milieu continu en
poss`ede theoriquement une innite cf chapitre sur les poutres).
Nota Bene : Les FRF que lon voit ici pour illustrer lexemple sont simulees et non mesurees.
Determination des frequences propres et amortissements modaux
40 Introduction ` a lanalyse modale
0 500 1000 1500 2000 2500 3000 3500 4000
40
20
0
20
40
60
80
Frequence (Hz)
M
o
d
u
l
e
s
d
e
s
a
c
c
r
a
n
c
e
s
Pt 1
Pt 2
Pt 3
Fig. 6.5 Modules des 3 FRF obtenues.
0 500 1000 1500 2000 2500 3000 3500 4000
180
90
0
90
180
Frequence (Hz)
P
h
a
s
e
s
d
e
s
a
c
c
r
a
n
c
e
s
e
n
d
e
g
r
s
Pt 1
Pt 2
Pt 3
Fig. 6.6 Phases des FRF.
En utilisant la methode damplitude du pic pour les premiers modes (peu amortis) et une methode plus
avancee pour les derniers (methode de recalage), on obtient comme frequences propres et amortissements modaux
Exemple : cas dune poutre en exion 41
(vous pouvez tenter de le verier ` a partir des gures) :
f
1
= 65.3Hz
1
= 0.015
f
2
= 409.4Hz
2
= 0.010
f
3
= 1146.2Hz
3
= 0.050
f
4
= 2246.1Hz
4
= 0.050
f
5
= 3712.9Hz
5
= 0.100
Determination des deformees modales
Une fois les frequences propres obtenues, on peut sinteresser aux deformees de la poutre ` a ces frequences de
vibration particuli`eres. Les amplitudes mesurees des 3 premi`eres deformees propres sont :
1
=
_
_
0.33
1.09
2.00
_
_
2
=
_
_
1.18
0.85
2.00
_
_
3
=
_
_
1.44
1.28
2.03
_
_
ce qui correspond graphiquement aux deformees modales presentees ` a la gure 6.7 o` u une normalisation par
rapport ` a la longueur de la poutre ` a ete faite.
0 1 2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Dforme 1
l
o
n
g
u
e
u
r
d
e
l
a
p
o
u
t
r
e
4 2 0 2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Dforme 2
l
o
n
g
u
e
u
r
d
e
l
a
p
o
u
t
r
e
2 0 2 4
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Dforme 3
l
o
n
g
u
e
u
r
d
e
l
a
p
o
u
t
r
e
Fig. 6.7 Estimation ` a partir des 3 points de mesure des 3 premi`eres deformees modales.
References et bibliographie
Lanalyse modale, dont on na fait queeurer les possibilites, est une science ` a part enti`ere. De nombreux
ouvrages y sont consacres, parmi lesquels on trouve :
[1] D.J. Ewins, Modal testing : theory pratice and application, Research studies press ltd, 1994
[2] D.J. Inman, Engineering vibration, Prentice-Hall international, 1994
[3] K.G. McConnel, Vibration testing : theory and practice, J. Wiley and Sons, 1995
[4] A.D. Nashif, D.I.G. Jones, J.P. Henderson, Vibration damping, J. Wiley and Sons, 1985
A Formalisme de Lagrange et
equations dEuler
A.1 Rappel sur le formalisme de Lagrange
Soit L = T V la fonction de Lagrange denie ` a partir de lenergie cinetique T et de lenergie potentielle V .
L est une fonction L(q, q, t) des coordonnees generalisees q, des vitesses generalisees q et du temps t. On peut
denir une fonctionnelle integrale de la fonction de Lagrange entre deux instants t
0
et t
1
, nommee action :
H =
_
t1
t0
L(q, q, t)dt (A.1)
qui doit etre extremale (theor`eme de Hamilton ou theor`eme de moindre action), ie H = 0.
Le theor`eme de Hamilton permet de remplacer les equations dequilibre pour des milieux elastiques par
une formulation variationnelle (extremum dune fonctionnelle). Il peut-etre plus simple de faire de bonnes
approximations sur la fonctionnelle de Hamilton que sur les equations dequilibre do` u linteret de la formulation
variationnelle.
Equation dequilibre Extremum dune fonctionnelle denergie
(Newton) (Hamilton)
Le calcul dextremalisation peut etre realise de deux fa cons :
La methode generale (et lourde) de calcul de la derivee (au sens de Gateau) cf A.2.1
Lutilisation des equations dEuler : equations donnant directement celles du mouvement et les conditions
aux limites pour des fonctionnelles de formes generales donnees.
Les equations dEuler appliquees ` a la fonction de Lagrange nous donnent, de fa con generale :
d
dt
_
T
q
i
_
T
q
i
+
V
q
i
= 0 (i = 1, . . . , n) (A.2)
En cas de forces exterieures Q
i
et deets dissipatifs, les equations dEuler-Lagrange deviennent :
d
dt
_
T
q
i
_
T
q
i
+
V
q
i
+
D
q
i
= Q
i
(i = 1, . . . , n) (A.3)
D etant une fonction dissipation (ou energie dissipee).
A.2 Equations dEuler
A.2.1 Fonctionnelle de Hamilton pour les vibrations longitudinales de poutres
droites minces
Reprenons la fonctionnelle obtenue dans le cas des vibrations longitudinales des poutres minces (eq. 4.6) :
H(u
0
1
) =
_
t1
t0
_
l
0
_
1
2
S
_
u
0
1
t
_
2
1
2
ES
_
u
0
1
x
1
_
2
+f
1
Su
0
1
_
dx
1
dt
44 Formalisme de Lagrange et equations dEuler
Cette fonctionnelle peut se mettre sous la forme :
H(u
0
1
) =
_
t1
t0
_
l
0
(u
0
1
, u
0
1,t
, u
0
1,x1
)dx
1
dt
Sa derivee au sens de Gateau est :
d
d
H(u
0
1
+v) =
_
t1
t0
_
l
0
d
d
(u
0
1
+v, u
0
1,t
+v
,t
, u
0
1,x1
+v
,x1
)dx
1
dt
Posons u = u
0
1
+v et utilisons la r`egle des derivations composees :
d
d
H(u
0
1
+v) =
_
t1
t0
_
l
0
_
u
v +
u
,t
v
,t
+
u
,x1
v
,x1
_
dx
1
dt
On int`egre les deuxi`eme et troisi`eme termes par parties :
_
t1
t0
_
l
0
u
,t
v
,t
dx
1
dt =
_
_
l
0
u
,t
vdx
1
_
t1
t0
. .
A
_
t1
t0
_
l
0
t
_
u
,t
_
vdx
1
dt
_
t1
t0
_
l
0
u
,x1
v
,x1
dx
1
dt =
_
_
t1
t0
u
,x1
vdt
_
l
0
_
t1
t0
_
l
0
x
1
_
u
,x1
_
vdx
1
dt
ou le terme A sannule puisque, par denition, v(x
1
, t
0
) = v(x
1
, t
1
) = 0.
Donc nalement :
d
d
H(u
0
1
+v) =
_
t1
t0
_
l
0
_
u
t
_
u
,t
_
x
1
_
u
,x1
_
_
vdx
1
dt +
_
t1
t0
_
u
,x1
v
_
l
0
dt (A.4)
et :
u
0
1
(x
1
, t) rend H extremale
d
d
H(u
0
1
+v)
=0
= 0 (A.5)
Si on eectue dans un premier temps des variations telles que v(0) = v(l) = 0, on aboutit ` a la condition :
u
0
1
t
_
u
0
1,t
_
x
1
_
u
0
1,x1
_
= 0 (A.6)
cest lequation du mouvement, cest aussi lequation dEuler associee ` a la fonctionnelle
Compte tenu de A.6, A.5 devient :
_
t1
t0
_
u
0
1,x1
(0, t)v(0, t)
u
0
1,x1
(l, t)v(l, t)
_
dt = 0
Ce qui impose :
_
_
u
0
1
(0, t) = 0
ou
u
0
1,x1
(0, t) = 0
et
_
_
u
0
1
(l, t) = 0
ou
u
0
1,x1
(l, t) = 0
(A.7)
ce sont les conditions limites possibles en x
1
= 0 et x
1
= l.
La demarche precedente eectuee dans le cas particulier de la fonctionnelle de Hamilton associee aux vibra-
tions longitudinales de poutre (fonction de deux variables : temps et espace) peut-etre generalisee ` a dautres
types de fonctionnelles.
A.2.2 Autres formes de fonctions dEuler
Extremalisation dune fonctionnelle ` a 2 fonctions du temps :
H(u
1
, u
2
) =
_
t1
t0
(u
1
, u
2
, u
1,t
, u
2,t
)dt
Equations dEuler 45
La fonctionnelle H est extremale si :
u
1
d
dt
u
1,t
= 0
u
2
d
dt
u
2,t
= 0
_
_
t ]t
0
, t
1
[
Extremalisation dune fonctionnelle ` a 1 fonction des deux variables temps et espace :
H(u) =
_
t1
t0
_
0
l
(u, u
,t
, u
,x
, u
,tt
, u
,xt
, u
,xx
)dxdt
La fonctionnelle H est extremale si :
Equation du mouvement :
u
t
u
,t
u
,x
+
2
t
2
u
,tt
+
2
xt
u
,xt
+
2
x
2
u
,xx
= 0
t ]t
0
, t
1
[
x ]0, l[
Conditions aux limites :
pour x = 0 ou x = l
_
_
_
soit u(x, t) = 0
soit
u
,x
u
,xx
= 0
t ]t
0
, t
1
[
et
_
_
_
soit u
,x
(x, t) = 0
soit
u
,xx
= 0
t ]t
0
, t
1
[
Extremalisation dune fonctionnelle ` a 1 fonction de trois variables (x
1
, x
2
, t) :
H(u) =
_
t1
t0
_
s
(u, u
,x1
, u
,x2
, u
,t
, u
,x1x1
, u
,x2x2
, u
,x1x2
, u
,x1t
, u
,x2t
, u
,tt
)dx
1
dx
2
dt
La fonctionnelle H est extremale si :
Equation du mouvement :
u
t
u
,t
x
1
u
,x1
x
2
u
,x2
+
2
x
2
1
u
,x1x1
+
2
x
2
2
u
,x2x2
+
2
x
1
x
2
u
,x1x2
+
2
x
1
t
u
,x1t
+
2
x
2
t
u
,x2t
+
2
t
2
u
,tt
= 0
t ]t
0
, t
1
[ (x
1
, x
2
) s
Conditions aux limites :
pour x = 0 ou x = l
_
_
soit u(x
1
, x
2
, t) = 0
soit
_
u
,x1
x
1
u
,x1x1
x
2
u
,x1x2
_
n
1
+
_
u
,x2
x
2
u
,x2x2
x
1
u
,x2x1
_
n
2
= 0
sur la fronti`ere et t ]t
0
, t
1
[
et
_
soit u
,n
(x
1
, x
2
, t) = 0
soit
u,x
1
x
1
n
2
1
+
u,x
2
x
2
n
2
2
+
u,x
1
x
2
n
1
n
2
= 0
sur la fronti`ere et t ]t
0
, t
1
[
46 Formalisme de Lagrange et equations dEuler
n
1
n
2
x
1
x
2
s
n
Vous aimerez peut-être aussi
- NFS 61-942-Alarme MenaceDocument29 pagesNFS 61-942-Alarme Menacejohn100% (1)
- Plan Stratégique Santé Communautaire Version Actualisée Nom Nouveau MSHPDocument93 pagesPlan Stratégique Santé Communautaire Version Actualisée Nom Nouveau MSHPRuben OpelyPas encore d'évaluation
- Cerballiance Res 20210507 210507MO007801Document1 pageCerballiance Res 20210507 210507MO007801Neymar RolandoPas encore d'évaluation
- Dossier Presentation GMPDocument8 pagesDossier Presentation GMPEuloge Evan SouamyPas encore d'évaluation
- Master PDF Final - CompressedDocument59 pagesMaster PDF Final - Compressedberty sifaPas encore d'évaluation
- Mise en PratiqueDocument2 pagesMise en PratiquePierre Frantz PetitPas encore d'évaluation
- Ajustement MécaniqueDocument1 pageAjustement Mécaniquechacha_yousraPas encore d'évaluation
- Devoir de Synthèse N°1 1er Semestre - Sciences Physiques - Bac Sciences Exp (2018-2019) MR Foued Bahlous PDFDocument7 pagesDevoir de Synthèse N°1 1er Semestre - Sciences Physiques - Bac Sciences Exp (2018-2019) MR Foued Bahlous PDFMohamed SaidiPas encore d'évaluation
- NF en 13108-2Document28 pagesNF en 13108-2Mohamed HOUGGAALIPas encore d'évaluation
- 00pa Ep Voirie AepDocument28 pages00pa Ep Voirie AepMohamed KarimiPas encore d'évaluation
- PHYSIOLOGIE Rein Nseka Modified FinalDocument46 pagesPHYSIOLOGIE Rein Nseka Modified FinalDominique Ilunga mbambiPas encore d'évaluation
- Cours - Chapitre2 - Communication Et SIDocument20 pagesCours - Chapitre2 - Communication Et SIHadia LEMIAPas encore d'évaluation
- Compilation 6eDocument102 pagesCompilation 6eMichèle Laura ATEUTCHIA TONMEZENGPas encore d'évaluation
- Chap 1Document144 pagesChap 1bilaPas encore d'évaluation
- Daw - TP1Document2 pagesDaw - TP1hamamaPas encore d'évaluation
- Programme de Cours Bts Informatique de Gestion 2eme AnneeDocument2 pagesProgramme de Cours Bts Informatique de Gestion 2eme AnneeammarkhodjanaceraPas encore d'évaluation
- NOTEX GLASS C 100x100-40 AN PDFDocument1 pageNOTEX GLASS C 100x100-40 AN PDFraoufPas encore d'évaluation
- Exemple Oral CFGDocument6 pagesExemple Oral CFGKristy LarsenPas encore d'évaluation
- Centrale 2014 P MP SDocument7 pagesCentrale 2014 P MP SAbdelhamid Dehayni AL Abdali100% (1)
- Correction EX3Document14 pagesCorrection EX3Nizar FerjaouiPas encore d'évaluation
- ULAF+ UMN V33-1 FraDocument162 pagesULAF+ UMN V33-1 FraChoubane Lamine75% (4)
- Tout Sur MIPSDocument31 pagesTout Sur MIPSSadio Barry100% (1)
- LorentzDocument6 pagesLorentzMr. MyceiPas encore d'évaluation
- MICRORESDocument3 pagesMICRORESKader BakourPas encore d'évaluation
- Outils QualitéDocument32 pagesOutils QualitéAbdessamad BenbahPas encore d'évaluation
- SEG S4 IG Chap 1 PDFDocument38 pagesSEG S4 IG Chap 1 PDFSoufiane RiyadPas encore d'évaluation
- TP Recap2 - Pointeurs Et FonctionsDocument7 pagesTP Recap2 - Pointeurs Et FonctionsMATH FOR EVERYONEPas encore d'évaluation
- Le Rotary Club de Rennes Reçoit Une Citation Du Président Du Rotary International Pour L'année 2010-2011Document3 pagesLe Rotary Club de Rennes Reçoit Une Citation Du Président Du Rotary International Pour L'année 2010-2011AnneArquePas encore d'évaluation
- Apprentissage Non SuperviséDocument57 pagesApprentissage Non SuperviséMarwen GuesmiPas encore d'évaluation
- Cps 359Document167 pagesCps 359Antonin JoeyKanePas encore d'évaluation