Académique Documents
Professionnel Documents
Culture Documents
Les Moteurs Pas À Pas
Les Moteurs Pas À Pas
Transféré par
Zakaria KhatarTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Les Moteurs Pas À Pas
Les Moteurs Pas À Pas
Transféré par
Zakaria KhatarDroits d'auteur :
Formats disponibles
Haute Ecole dIngnierie et de Gestion
Du Canton du Vaud
Systmes lectromcaniques
___________
Chapitre 07
CD\SEM\Cours\Chap07
LES MOTEURS PAS PAS
M. Correvon
T A B L E
D E S
M A T I E R E S
PAGE
7.
LES MOTEURS PAS--PAS ........................................................................................................................................1
7.1
INTRODUCTION ...........................................................................................................................................................1
7.1.1
Dfinition d'un actionneur pas pas...................................................................................................... 1
7.1.2
Proprits et applications ...................................................................................................................... 3
7.2
TYPE PRINCIPAUX DE MOTEURS .................................................................................................................................4
7.2.1
Moteur pas--pas rluctance variable MRV ....................................................................................... 5
7.2.2
Moteur pas pas aimants permanents MP ....................................................................................... 16
7.2.3
Moteur pas--pas hybride MH ............................................................................................................ 24
7.2.4
Comparaison entre les trois types de moteurs pas pas...................................................................... 26
7.3
MODE DE COMMANDE DES MOTEURS PAS PAS BIPHASS.....................................................................................27
7.3.1
Mode 1 : commande en pas entier, une phase ON .............................................................................. 27
7.3.2
Mode 2 : commande symtrique en pas entier, deux phases ON ........................................................ 27
7.3.3
Mode 3 : commande asymtrique en demi pas, une ou deux phases ON............................................ 28
7.3.4
Mode 4 : commande symtrique en demi pas, une ou deux phases ON.............................................. 29
7.3.5
Mode 5 : commande micro pas ........................................................................................................... 29
7.3.6
Mode 6 : commande en auto commutation (utilisation dun capteur)................................................. 30
7.4
COMPORTEMENT STATIQUE .....................................................................................................................................31
7.4.1
Position dquilibre ............................................................................................................................. 31
7.4.2
Condition pour le dplacement dun pas ............................................................................................. 32
7.5
COMPORTEMENT DYNAMIQUE .................................................................................................................................33
7.5.1
Gnralits .......................................................................................................................................... 33
7.5.2
Dplacement autour dune position dquilibre .................................................................................. 33
7.5.3
Modlisation complte du moteur....................................................................................................... 37
7.5.4
La commande en tension..................................................................................................................... 39
7.5.5
La commande en courant .................................................................................................................... 40
7.5.6
Amortissement du mouvement sur un pas........................................................................................... 45
7.6
DOMAINE DE FONCTIONNNEMENT DES MOTEURS PAS PAS ..................................................................................46
7.6.1
Comportement aux basses vitesses...................................................................................................... 46
Bibliographie
LES MOTEURS PAS A PAS
Page 1
7. LES MOTEURS PAS--PAS
7.1
7.1.1
INTRODUCTION
Dfinition d'un actionneur pas pas
Le moteur pas pas constitue un convertisseur lectromcanique destin transformer le
signal lectrique (impulsion ou train d'impulsions de pilotage) en dplacement (angulaire ou
linaire) mcanique.
Au point de vue lectrotechnique, le moteur classique ressemble la machine synchrone,
dont le stator (le plus souvent ples saillants) porte les enroulements de pilotage et le rotor
(presque toujours ples saillants) est soit muni daimants permanents (structure dite
polarise ou active), soit constitu par une pice ferromagntique dente (structure dite
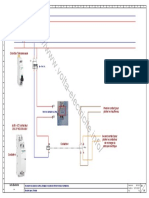
rluctante ou passive). Entre le moteur et son alimentation, sont intercals trois lments
essentiels (Figure 7-1)
-
une unit de calcul, qui labore les impulsions de commande ;
un modulateur PWM, qui gnre les commandes des contacteurs lectroniques de
commutation ;
une lectronique de commutation (puissance), qui, partir d'une alimentation, fourni
lnergie vers les enroulements appropris du moteur.
Calculateur de processus :
Microcontrleur
Microprocesseur
DSP "motion control"
Capteur de
Position / vitesse
Capteur de
commutation
Commande
PWM
Source AC
Surveillance
&
Asservissement
Variateur
de
courant
pulsation
Codeur
Mesure de
Tension / courant
Moteur
Charge
Auxiliaires
Tension du circuit
intermdiaire
Alimentation:
Figure 7-1 : Schma bloc de principe du contrle dun moteur pas--pas
Lalimentation de chaque bobinage du moteur par une tension particulire provoque
lapparition dun courant qui engendre un champ magntique de direction prcise. Le
changement squentiel des tensions particulires chaque bobinage permet de dplacer la
position du champ statorique selon une rsolution lmentaire appele pas. Autrement dit,
toutes configurations des tensions aux bornes des bobinages correspondent un dplacement
de la position stable du rotor. Une srie bien dtermine de commutation de tensions entrane
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 2
un dplacement sur un nombre correspondant de pas. La succession des configurations
dalimentation, une frquence donne, impose un champ statorique tournant avec une
rsolution dun micro pas, dun demi pas ou dun pas entier.
Le mouvement discret du champ d'entrefer est suivi par le rotor soumis au couple
synchronisant. La nature du couple dcoule
soit d'interaction champ (courant) du stator - fer du rotor, lorsque ce dernier prsente
une structure dente passive (Figure 7-2) ;
soit d'interaction champ (courant) du stator - champ (aimant) du rotor, lorsque le rotor
comporte un aimant (Figure 7-3).
soit les deux interactions prcdentes simultanment.
L'exemple de la Figure 7-2 (purement didactique, car la ralisation correspondante
prsenterait des performances mdiocres) permet de dfinir le fonctionnement essentiel du
moteur. Le stator trois ples saillants (nous dirons par la suite : " trois plots statoriques" ;
Nps = 3) comporte trois bobines (ou trois voies) pouvant tre alimentes sparment. Une
bobine (ou une voie) d'enroulement, pouvant tre alimente sparment, sera appele une
phase.
Dans le cas du rotor passif (qui, sur la Figure 7-2 , possde deux dents ; Ndr, = 2), le
branchement de la phase 1 provoque l'tablissement du champ magntique, qui place le fer
mobile dans la position du flux maximal ; ainsi, une dent du rotor s'aligne avec le plot
aliment (Figure 7-2a), la commutation de la tension sur la phase 2 avance le champ, et donc
le rotor, d'un pas mcanique angulaire pm, (Figure 7-2b), etc. Le couple synchronisant
"courant-fer" est d la variation de l'inductance propre de la phase sous tension ou, ce qui
revient au mme, la variation de la rluctance offerte au passage du flux statorique qu'elle a
cr. La machine rotor ferromagntique passif est appele : " rluctance variable" ou
"MRV".
pm
Figure 7-2 : Principe dun moteur pas--pas rluctance variable (MRV)
Lorsque le rotor est constitu par un aimant (bipolaire, soit na = 1 sur la Figure 7-3), il
s'aligne naturellement sur l'axe magntique du plot aliment (Figure 7-3a). Le dplacement
du champ statorique d'un pas provoque le dplacement du rotor d'un pas angulaire mcanique
(Figure 7-3b). Laimant du rotor tant permabilit constante et lentrefer tant constant, le
couple synchronisant "courant-aimant" est d uniquement la variation du flux mutuel entre
laimant au rotor et la phase alimente du stator. Un moteur tel que dcrit ci-dessus (voir
Figure 7-3) est appele "aimant permanent" ou "MP".
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 3
pm
1
Figure 7-3 : Principe dun moteur pas--pas aimants permanents (MP)
Une autre structure polarise, dite "hybride" ou "MH", est illustre la Figure 7-4 ; elle
comporte un aimant permanent et son principe de fonctionnement est semblable celui du
moteur aimants permanents MP. Il est toutefois noter que le couple rluctant (variation de
la permance propre laimant) est plus importante dans ce dernier cas.
pm
1
Figure 7-4 : Principe dun moteur pas--pas hybride (MH)
7.1.2
Proprits et applications
Le moteur pas pas a t conu partir de deux dmarches logiques trs diffrentes
-
d'une part, on a cherch un moteur capable de dvelopper un couple important
faible vitesse, voire mme l'arrt ;
d'autre part, on a tudi un dispositif capable de convertir des informations de
caractre discret.
Le convertisseur d'nergie basse vitesse et le transmetteur de l'information sont devenus un
moteur pas pas moderne vers les annes 1970, grce au dveloppement conjugu de
l'lectronique de puissance et, surtout, grce l'apparition de llectronique numrique forte
intgration.
Le moteur pas pas est actuellement le principal lment intermdiaire entre les dispositifs
de traitement d'information et le monde lectromcanique extrieur. Par ailleurs, ses
capacits contrler la position et la vitesse, par un train dimpulsions de commande,
assurent ce convertisseur des applications comme
-
la traction des robots mobiles,
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 4
le fonctionnement en moteur couple de grande puissance,
lindexage rotatif ou limaire.
Dans sa version classique, le moteur pas pas est aliment partir d'une source (de courant
ou de tension) continue et le contrle de la vitesse ou/et de la position s'effectue en boucle
ouverte.
Le pilotage en boucle ouverte, qui constitue un des principaux avantages du moteur pas pas,
aussi bien du point de vue conomique (cot et fiabilit d'installation) que fonctionnel
(commande naturelle par "tout ou rien" partir d'une horloge spare ou intgre dans un
microprocesseur), prsente un certain nombre d'inconvnients comme
la limitation du couple de dmarrage,
des instabilits de fonctionnement certaines frquences,
des acclrations relativement modestes,
7.2
TYPE PRINCIPAUX DE MOTEURS
Trois types principaux de moteurs seront abords, les moteurs pas--pas rluctants, les
moteurs pas--pas aimants permanents, les moteurs pas pas rluctants polariss.
La dfinition gnralise du couple lectromagntique dun actuateur a t dmontre au
chapitre 4 Conversion Electromcanique . On en rappelle ici la forme gnrale :
Tem =
1
2
na + nb
n =1
n a + nb nm 1 n a + nb na + nb Lnm 1 n a + nb n a + nb mn
= in
in
im =
n m
2
2
1
1
1
1
1
=
=
=
=
=
m
n
m
n
m
7.1
Dans le cas dun actuateur form de nb bobines au stator et dun rotor avec na aimants, on
peut expliciter la relation 7.1 sous la forme suivante :
Tem
nb
bkbl
1
N k ik N l il
2 k
, l =1
1 na
= aiaj ai aj
2
i , j =1
bkaj
1
N k ik ai
2 k =1...nb
i =1...na
: interraction entre bobinages
: interraction entre aimants
: interraction entre bobinages aimants
Chaque terme va dpendre de la construction du moteur.
CD\SEM\Cours\Chap07
7.2
LES MOTEURS PAS A PAS
7.2.1
Page 5
Moteur pas--pas rluctance variable MRV
7.2.1.1 Gnralits
Le moteur pas--pas rluctant (Variable reluctance motor VR) comporte nb bobines distinctes
au stator et un rotor ferromagntique sans aimant (na=0). Sans courant dans les bobinages
statoriques, ce type de moteur ne prsente pas de couple rluctant.
1 b
= bkbl N k ik N l il
2 k , l =1
n
Tem
1 nb bkbk
2
2 (N k ik )
k =1
=
nb bkbl
N k ik N l il
k <l
interractions propres
(1) :
de chaque bobine
7.3
interractions mutuels
( 2) :
entre bobines
nb : nombre de bobines au stator
1. Le premier terme de la relation 7.3 reprsente le couple rluctant d la variation
angulaire des permances propres de chaque bobinage.
2. Le second terme de la relation 7.3 reprsente le couple d la variation angulaire des
permances mutuelles entre chaque bobinage (couple lectromagntique).
On voit ici que pour pouvoir gnrer un couple, il faut crer une variation de la permance
propre de chaque bobine et/ou de la permance mutuelle entre bobines. En posant m comme
le nombre de phases ou le nombre de groupes de bobines distinctes (pouvant tre alimentes
sparment) et en admettant que seul le groupe de bobines k, (k=[1,m]) est aliment, la
relation gnrale 7.3 devient :
Tem =
1 bkbk
(N k ik )2
2
7.4
7.2.1.2 Technologie des moteurs pas-a-pas rluctance variable
Les circuits magntiques du rotor et du stator sont assembls partir de tles magntiques de
haute permabilit (fer-silicium ou mme fer-cobalt). Certaines machines, destines au
positionnement ou a une rotation trs lente, peuvent avoir un rotor ou/et un stator en fer
massif. Il existe un grand nombre dastuces de construction pour augmenter le nombre de pas
par tour, comme par exemple les structures bifilaires qui ne seront pas tudies dans ce cours.
Pour minimiser la force magntomotrice et augmenter la puissance massique, lentrefer des
moteurs pas pas reluctance variable doit tre aussi petit que possible. Plusieurs gomtries
du rotor et du stator ont t ainsi imagines par les constructeurs pour remplir des cahiers des
charges particuliers. On distingue trois gomtries de base, savoir :
-
Les moteurs pas pas rluctance variable plots statoriques non dents
Les moteurs pas pas rluctance variable plots statoriques dents
Les moteurs pas pas rluctance variable plots statoriques non dent dcals
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 6
7.2.1.2.1 Moteurs pas pas reluctance variable plots statoriques non dent
Dans les moteurs pas pas reluctance variable plots statoriques non dent, le pas des plots
statoriques diffre du pas dentaire du rotor. La Figure 7-5 illustre un exemple classique de ce
type de moteur.
2
3'
3
2'
1'
Figure 7-5 : Moteur rluctance variable (MRV)
Ce moteur possde 3 phases, m=3, six plots au stator, Nps=6 et quatre dents au rotor, Ndr=4.
Les positions dquilibres du rotor sont places aux endroits ou la rluctance vue par les
bobines alimentes prsente un minimum. Lorsque seules les bobines places sur des plots
dcals de 180 mcanique sont alimentes, deux dents du stator se mettent en face des deux
plots du stator dont les bobines sont parcourues par un courant dont le sens na aucune
importance puisque le rotor, passif, ne peut distinguer la direction du champ magntique.
La squence dalimentation des bobines dfinis le sens de rotation du moteur. Le rotor
effectue donc 3 pas pour effectuer un quart de tour en admettant que seul un groupe de
bobines est aliment simultanment. La Figure 7-6 montre la suite des pas effectue pour une
priode lectrique.
On peut crire, pour le nombre de pas par priode de commutation (une squence de
commutation sur les m phases)
N pc = m
CD\SEM\Cours\Chap07
7.5
LES MOTEURS PAS A PAS
Page 7
2'
1'
1re commutation
2me commutation
1
3'
1'
3me commutation
4me commutation
Figure 7-6 : Moteur rluctance variable (MRV), principe de fonctionnement
Pour dterminer la structure du moteur permettant dobtenir le nombre de pas dsir, il
convient de choisir le nombre de plots au stator (Nps) et le nombre de dents au rotor (Ndr) de
telle sorte que la rluctance offerte au passage du flux magntique varie avec la rotation.
Ainsi pour une machine dont lespacement des plots et des dents est rgulier, le pas dentaire
dr et le pas des plots ps doivent tre diffrents
Conformment la Figure 7-7, on peut crire pour langle mcanique m dun pas
N N dr
m = dr ps = 2 2 = 2 ps
>0
N dr
N ps
N ps N dr
7.6
Ainsi le nombre de pas par tour Npt est dfinit comme
N pt =
CD\SEM\Cours\Chap07
N ps N dr
N ps N dr
7.7
LES MOTEURS PAS A PAS
Page 8
ps
dr
m
Figure 7-7 : Moteur rluctance variable (MRV), pas dentaire et pas des plots
ou encore, en observant la Figure 7-6
N pt = mN dr
7.8
En tenant compte des relations 7.7 et 7.8
N pc =
N ps
N ps N dr
7.9
Langle lectrique dun pas quant lui est donn par la relation
e = m m = 2 m
N ps N dr
N ps N dr
7.10
A laide de la Figure 7-7, on voit que le moteur rluctant nest commandable que si le
nombre de phases est gal ou suprieur trois.
A partir des relations 7.6 et 7.8, on peut crire
N dr
1
= 1
N ps
m
7.11
Ou sous une forme plus gnrale :
N dr
1
=K
N ps
m
avec K entier positif
La Figure 7-8 illustre le cas ou
CD\SEM\Cours\Chap07
N dr
1
= 1 + , soit Ndr>Nps
N ps
m
7.12
LES MOTEURS PAS A PAS
Page 9
1
2'
1'
1re commutation
2me commutation
1
3'
1'
3me commutation
4me commutation
Figure 7-8 : Moteur rluctance variable (MRV), principe de fonctionnement
Le Tableau 7-1 donne diverses combinaisons possibles.
Nb de pas
par tour
Npt [1]
nb de
phases
6
12
18
24
24
24
30
36
36
36
48
48
48
72
CD\SEM\Cours\Chap07
1
m [1]
m
1-1/3
1-1/3
1-1/3
1-1/3
1-1/4
1+1/3
1-1/3
1-1/3
1-1/4
1+1/3
1-1/3
1-1/4
1+1/3
1-1/3
3
3
3
3
4
3
3
3
4
3
3
4
3
3
Angle mcanique dun pas
m []
2
m =
N pt
60
30
20
15
15
15
12
10
10
10
7.5
7.5
7.5
5
Nb de dents au rotor
Ndr [1]
N
N dr = pt
m
2
4
6
8
6
8
10
12
9
12
16
12
16
24
Nb de plots au stator
N ps
Nps [1]
N dr
=m
m K 1
3
6
9
12
8
6
15
18
12
9
24
16
12
36
LES MOTEURS PAS A PAS
Page 10
Nb de pas
par tour
Npt [1]
nb de
phases
72
72
100
100
180
180
180
180
1
m [1]
m
1-1/4
1+1/3
1-1/5
1+1/4
1-1/3
1-1/4
1+1/3
1+1/4
Angle mcanique dun pas
m []
2
m =
4
3
5
4
3
4
3
4
Nb de dents au rotor
Ndr [1]
N
N dr = pt
m
N pt
5
5
3.6
3.6
2
2
2
2
Nb de plots au stator
N ps
Nps [1]
N dr
=m
m K 1
18
24
20
25
60
45
60
45
24
18
25
20
90
60
45
36
Tableau 7-1 : Combinaisons possibles
7.2.1.2.2 Moteurs pas pas rluctance variable plots statoriques dents
Dans les moteurs pas pas rluctance variable plots statoriques dents, le rotor est
uniformment dent et les plots du stator portent galement un certain nombre de dents Ndps,
dont la pas dentaire est identique celui du rotor. Les plots du stator sont rpartis
symtriquement et le nombre de dents sur leur surface dpend de lpanouissement des plots.
Le pas dentaire du rotor dr est choisi de telle sorte que les dents des plots diamtralement
opposes soient en face des dents du rotor, et les dents des autres plots soient dcals de
k/mdr (1 k m-1) pour la mme position relative rotor-stator. La Figure 7-9 illustre la
structure de ce type de moteur.
3'
2
dr
dr
2'
1'
Figure 7-9 : Moteur rluctance variable (MRV), pas dentaire et pas des plots
Comme le montre la Figure 7-10, la commutation dune phase (12 par exemple) provoque
une rotation du champ magntique dun angle mcanique
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
m =
Page 11
2
N ps
7.13
Avec Nps, nombre de plots statoriques.
Le rotor se dplace alors de langle mcanique m suivant
m =
2
2
=
N dr N pc m N dr
7.14
Le rapport entre la rotation du champ magntique et la rotation du rotor vaut
m N dr N pc
=
m
N ps
7.15
2
m
2'
1'
3'
1'
Figure 7-10 : Moteur rluctance variable (MRV), pas dentaire et pas des plots
Le nombre de dents rotoriques dpasse rarement 100 et le nombre de phases peut
difficilement dpasser 8 do la rsolution raisonnable maximale des machines plots dents
de
m = 0.45
CD\SEM\Cours\Chap07
7.16
LES MOTEURS PAS A PAS
Page 12
7.2.1.2.3 Moteurs pas pas reluctance variable plots statoriques dents dcals
Pour augmenter lespace rserv aux enroulements (augmentation de la force
magntomotrice), on renonce parfois la possibilit dalimenter simultanment deux plots
opposs, en crant une structure plots dents dcals.
Pour un moteur pas pas de ce type, chaque plot statorique porte lenroulement dune phase,
soit Nps=m, mais un seul plot voit ces dents alignes avec les dents du rotor. La dissymtrie
du champ magntique dans lentrefer provoque des forces radiales et par consquent des
contraintes dans les paliers et larbre du moteur
La Figure 7-11 un cas qui nest pas ralis en pratique cest dire que les dents au rotor et au
stator sont rectangulaires et prsentent le mme pas. En ralit les dimensions des dents et
des encoches sont choisies selon des rgles particulires qui ne sont pas abordes dans ce
cours.
Figure 7-11 : Moteur rluctance variable (MRV), plots statoriques dents dcals
Pour une moteur rotation lente (10 50 t/min), les encoches rectangulaires au rotor et au
stator prsentent les mmes performances statiques et dynamiques que les encoches plus
compliques. Dans ce cas on a
Lds
ds
Ldr
dr
Largeur d ' une dent 1
=
2
Pas dentaire
7.17
Pour des machines rotation plus rapide, les formes des encoches dpendent du sens de
rotation. Si on souhaite garder le mouvement dans les deux sens, le meilleur compromis est
de raliser des encoches rectangulaires sur la partie immobile et des encoches semicirculaires sur la partie mobile.
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 13
ds
L ds
L dr
L ds
ds
dr
(a)
(b)
Figure 7-12 : Moteur rluctance variable (MRV), dtails sur la forme des dents
7.2.1.2.4 Moteurs pas pas reluctance variable circuits multiples (multi stack)
Pour augmenter le couple des machines rluctance tout en gardant une frquence
mcanique de fonctionnement (quelques dizaines de pas par seconde), on propose des
constructions circuits magntiques multiples (multi stack), qui se prsentent sous deux
formes essentielles :
-
un empilage de plusieurs moteurs circuits simples (single stack) identiques,
couples mcaniquement sur un seul arbre (Figure 7-13)
moteur stator unique, possdant plusieurs rotors magntiquement indpendants,
mais coupls mcaniquement (Figure 7-14).
dr
1
3 dr
2
3 dr
Figure 7-13 : Moteur rluctance variable (MRV), machine rotors dcals (1)
Dans toutes ces machines, le rotor et le stator prsentent le mme nombre de dents, leffet de
rluctance variable tant obtenu par le dcalage mcanique des rotors les uns par rapport aux
autres, dun angle correspondant :
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
m =
Page 14
dr
7.18
nb. de circuits magntique s
Comme le circuit lectrique pilotant chaque rotor correspond une phase, le dcalage entre
les rotors est :
m =
dr
7.19
do
N pt =
2 m
dr
2 m
= m N dr
2
N dr
7.20
Le moteur de la Figure 7-14 a ses trois rotors dcals de 1/3dr. Lorsquon alimente une des
armatures, ses dents salignent avec celles du rotor qui lui font face, ce qui dcale
automatiquement les dents des autres rotors par rapport leur armature immobile.
I3
Figure 7-14 : Moteur rluctance variable (MRV), machine rotors dcals (2)
La relation entre langle mcanique m et e est donn par la relation suivante
m = mN dr e
7.21
Vu la complexit des structures magntiques en jeu, la caractristique de couple dun moteur
pas pas rluctance variable doit tre mesure exprimentalement en mesurant, pour
chaque position angulaire, le couple extrieur appliquer pour maintenir le rotor en quilibre.
Lorsque le rotor nest pas charg, il se positionne en face dun ou de plusieurs plots. Le
couple rsistant extrieur appliqu au rotor provoque un dplacement de celui-ci jusqu un
point dquilibre. Lorsque le couple rsistant dpasse la valeur maximum du couple moteur,
le rotor se met en rotation. On peut ainsi dfinir le couple de maintien. Le couple de maintien
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 15
est une fonction quadratique du courant lorsque le circuit magntique ne prsente pas de
saturation.
La caractristique du couple angulaire de la Figure 7-15 concerne une seule phase alimente
Figure 7-15 : Couple appliqu au rotor lorsquun courant circule dans les enroulements de la phase 1
Lerreur numrique que peut entraner lapproximation sinusodale par rapport au relev
exprimental dpasse rarement 5%, aussi bien pour les couples de maintien et de dmarrage
que pour les prcisions de positionnement.
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
7.2.2
Page 16
Moteur pas pas aimants permanents MP
7.2.2.1 Gnralits
Contrairement au cas prcdant, ici le moteur (Permanent Magnet motor PM).possde 2p
aimants au rotor (p : nombre de paires de ples). Dans ce cas, sans courant dans les m
bobinages statoriques, il existe bel et bien un couple rluctant. En observant ce couple il est
facile de dterminer le nombre de pas par tour du moteur.
Tem =
n
n
bkaj
1 b bkbl
1 a aiaj
N
i
N
i
N k ik ai
ai aj +
+
k k
l l
2 k , l =1
2 i , j =1
k =1... nb
i =1... na
na
aiai 2
1
2 i =1 ai
1 nb
2
bkbk (N k ik ) 0
k =1
n
a
= aiaj ai aj
i< j
nb
bkbl N i N i 0
k k
l l
k <l
1
bkal
N k ik al
2 k =1...nb
l =1...na
interractions propres
(1) :
de chaque aimant
interractions propres
( 2) :
de chaque bobine
interractions mutuels
(3) :
entre aimants
7.22
interractions mutuels
( 4) :
entre bobines
interractions mutuels
(5) :
entre bobines et aimants
na : nombre daimants au rotor
nb : nombre de bobines au stator
Les termes de la relation 7.22 reprsentent :
1. Le couple rluctant d la variation angulaire des permances propres de chaque
aimant plac au rotor.
2. Le couple rluctant d la variation angulaire des permances propres de chaque
bobine place au stator.
3. Le couple d la variation angulaire des permances mutuelles entre chaque aimant
plac au rotor.
4. Le couple d la variation angulaire des permances mutuelles entre chaque bobine
place au stator.
5. Le couple lectromagntique d la variation angulaire des permances mutuelles
entre chaque aimant au rotor et chaque bobinage au stator.
En principe ce type de moteur, grce la construction particulire du rotor, na pas de
variations des permances propres et mutuelles entre bobinages statoriques.
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 17
Dans sa version simple, le moteur pas pas aimants permanents peut tre excit par un
stator structure saillante ou structure lisse. Le rotor possde un seul aimant.
i 1 =i
1
i 1=i
i 2=i
N
2'
2
S
2'
i2 =i
1'
Stator structure lisse
1'
Stator structure saillante
Figure 7-16 : Moteur aimants permanents (MP), structure de base
Les deux structures possdent gnralement un aimant permanent mobile, aimantation
parallle, qui, en fonction des courants injects dans chaque voie denroulement, fait avancer
ou/et positionner le rotor conformment aux axes du champ magntique cr par la
commutation.
Le principe de fonctionnement de base est identique pour les structures saillantes et lisses.
Par contre, la structure saillante peut prsenter un couple rluctant supplmentaire, dit
couple de dtente , provenant de laction de laimant sur les plots statoriques.
En excitant le stator phase par phase selon la Figure 7-17, le vecteur reprsentant laxe
magntique statorique accomplit une rotation selon des angles privilgis dans le sens horaire
ce qui fait avancer le rotor dun angle incrmental lmentaire dfinit comme le pas angulaire
mcanique :
m =
pm
7.23
avec
p : nombre de paires de ples magntiques vu par le stator (nombre daimants)
m : nombre de phases
Le nombre de pas par tour est dfinit par la relation
N pt = 2 p m
7.24
Linversion du sens de rotation seffectue par inversion du sens de rotation de laxe
magntique statorique ce qui correspond une inversion de la squence dalimentation des
enroulements des diffrentes phases
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 18
1
i 1 =i
i 1 =i
i 2 =0
i 2 =i
2'
2'
2
S
1'
1'
u1, i 1
u 1, i 1
u2, i 2
u2, i 2
Stator
Rotor
Rotor
Stator
Figure 7-17 : Moteur aimants permanents (MP), structure de base
7.2.2.2 Technologie des moteur pas pas aimants permanents
La construction des moteurs pas pas aimants permanents obit aux rgles gnrales
suivantes :
-
Le stator, le plus souvent ples saillants, est assembl partir de tles magntiques en
fer silicium, isoles par oxydation ou par un vernis.
Lentrefer entre plots et aimant(s) est maintenu aussi petit que possible.
Le rotor est constitu soit entirement par un aimant permanent cylindrique dans lequel
on usine une ouverture pour passer larbre, soit par une carcasse en fer le plus souvent
feuillete sur laquelle est frette les aimants
Les aimants actuellement employs sont base de ferrite, de terre rare soit Nodyme fer ou
Samarium - Cobalt ; il sagit de matriaux magntique dont la permabilit relative est
proche de 1 et sont pratiquement non conducteurs ; ainsi, linductance des enroulements
statoriques est indpendante de la position relative rotor stator et par consquent le couple
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 19
d la variation des permances propres et mutuelles des inductances statoriques est
pratiquement nul.
La Figure 7-18 illustre un tel moteur. Le rotor est un disque constitu de p aimants polarits
inverses
1
S
2'
2
N
N
S
S
N
1'
Figure 7-18 : Moteur pas pas rotor disque escap P532
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 20
Le rotor du moteur pas pas prsent Figure 7-18 consiste essentiellement en un mince
disque en samarium-cobalt. Une technique particulire daimantation axiale permet dobtenir
un grand nombre de ples magntiques de polarit alterne, arrang uniformment sur le
disque. Ce dernier est plac dans lentrefer entre deux moitis du stator. Linduit de chaque
phase comprend 2 enroulements indpendants qui peuvent tre branches en srie ou en
parallle et permettent galement lutilisation dune commande unipolaire. Il ny a pas
dinductance mutuelle entre les deux phases.
Le moteur rotor disque possde un couple de dtente d aux variations de permances
propres et mutuelles vues par les aimants (circuit magntique du stator). Grce des
techniques de fabrication, il est possible de ramener le couple de dtente un faible niveau.
La forme exacte de la distribution du couple en fonction de la position angulaire relative rotor
stator suit en gnral une fonction mathmatique complexe. Grce des astuces de
construction qui font lobjet de brevets le moteur pas pas rotor disque peut avoir une
fonction de couple purement sinusodale. Cest important pour rduire lerreur angulaire si on
veut effectuer des positionnements sur des micros pas.
La Figure 7-19 montre le cas dune position stable car le courant dans les enroulements de la
phase 1 provoque un flux align avec celui des aimants.
N
0
i1=i
i2 =0
1'
2'
Position stable
Figure 7-19 : Dtail de la structure (position correspondant une position stable)
A partir de la Figure 7-19 on peut exprimer le couple moteur global par la relation
Tem
n
na
n
n
aiaj
1 a aiai 2
1 a b bkai
ai +
ai aj +
N k ik ai
=
2 =1
2 i =1 k =1
i< j
1i4
4244
3
1
442443
1444
424444
3
Couple rluctant
Couple mutuel entre aimants
Couple mutuel aimants bobines
144444424444443
Couple de dtente
7.25
= Tr sin(4 pm ) K T sin( pm )i1 K T cos( pm )i2
14
4244
3 144244
3 1442443
Couple de dtente
Couple phase 1
Couple phase 2
O p reprsente le nombre de paires de ples magntiques sur un mme ct du disque.
La Figure 7-20 montre les divers couples appliqus au rotor lorsque seule la phase 1 est
alimente.
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 21
Figure 7-20 : Couples appliqus au rotor lorsquun courant circule dans les enroulements de la phase 1
Le couple de dtente offre des avantages et des inconvnients. Comme son action est
indpendante du courant statorique, il permet de positionner le rotor (mme en charge), en
absence de courant dans les enroulements. On dit quil possde une mmoire de position.
Certains constructeurs dfinissent :
-
Un couple de dtente nominal comme un couple maximal statique, qui peut tre
appliqu au moteur non aliment sans provoquer la rotation du rotor,
une position de dtente comme la position sur laquelle le rotor du moteur non
alimente sarrte vide.
Dans un moteur pas pas aimants permanents aliment, le couple de dtente et couple
rsultant de linteraction des courants dans les enroulements avec les aimants au rotor
agissent ensemble comme le montre la Figure 7-20. Si le couple de dtente est trop
important, une dformation exagre peut provoquer laccrochage sur un point de
fonctionnement pseudo stable provoquant des vibrations importantes lors de commutation.
Ces vibrations et le bruit qui en rsultent peuvent tre amplifis lorsque la pulsation du
couple concide avec la frquence mcanique propre de la structure statorique ou rotorique
Limportance du couple de dtente est fixe la construction en agissant sur :
-
La forme des plots statoriques (inclinaison),
Le positionnement relatif des ples (aimants) du rotor (montage en damier, montage
hlicodal, ),
Le rapport entre la largeur des ples du rotor et lpanouissement des plots du stator.
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 22
Figure 7-21 : Couples appliqus au rotor lorsquun courant circule dans les enroulements de la phase 1
La Figure 7-22 montre un autre type de moteur pas pas aimants permanents. Le rotor est
constitu dune suite daimants de polarits inverses placs sur un cylindre. Le stator est
constitu de deux parties dont chacune possde un bobinage entour dun circuit magntique
constitu de griffes sur la surface intrieure. Selon les sens du courant dans le bobinage, les
griffes sont alternativement polarises N S ou S N.
Rotor
Stator 1
Phase 1
Phase 2
Stator 2
Figure 7-22 : Moteur aimants permanents (MP)
La Figure 7-23 montre de manire dtaille linteraction magntique entre stator et rotor
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 23
Phase 1
S
N
S
N
S
N
S
N
S
N
S
N
1
Sens du mouvement
du rotor
Phase 2
S
N
S
N
S
N
2
Figure 7-23 : Moteur aimants permanents (MP)
Les caractristiques de couples de ce moteur sont trs semblables ceux du moteur rotor
disque.
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
7.2.3
Page 24
Moteur pas--pas hybride MH
7.2.3.1 Gnralits
En combinant les structures des deux moteurs prcdents, cest dire en plaant les aimants
du moteur aimants permanents dans un circuit ferromagntique on cre un nouveau type de
moteur appel moteur rluctant polaris ou moteur hybride (Hybrid motor : HB). Dans ce
cas, il existe un couple rluctant provoqu par la variation de permances propres associes
chaque aimant et chaque bobine.
Tem =
n
n
bkaj
1 b bkbl
1 a aiaj
N
i
N
i
N k iki
+
i j +
k k l l
2 k ,l =1
2 i , j =1
k =1... n b
i =1... n a
na
aiai 2
1
2 i =1 ai
1 nb
2
bkbk (N k ik ) 0
2 k =1
n
a
= aiaj ai aj
i< j
nb
bkbl N i N i 0
k k l l
k <l
1
bkal
N k ik N l il
2 k =1...nb
l =1...na
interractions propres
(1) :
de chaque aimant
interractions propres
( 2) :
de chaque bobine
interractions mutuels
(3) :
entre aimants
7.26
interractions mutuels
( 4) :
entre bobines
interractions mutuels
(5) :
entre bobines et aimants
na : nombre daimants au rotor
nb : nombre de bobines au stator
Les termes de la relation 7.22 reprsentent :
1. le couple rluctant d la variation angulaire des permances propres de chaque
aimant plac au rotor,
2. le couple rluctant d la variation angulaire des permances propres de chaque
bobine place au stator,
3. le couple d la variation angulaire des permances mutuelles entre chaque aimant
plac au rotor,
4. le couple d la variation angulaire des permances mutuelles entre chaque bobine
place au stator,
5. le couple d la variation angulaire des permances mutuelles entre chaque aimant
au rotor et chaque bobinage au stator.
Pour ce type de moteur, il ny a pas de variations de permances mutuelles entre bobinages
statoriques. De plus, les couples cres par la variation des permances propres de chaque
phase se compensent.
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 25
7.2.3.2 Technologie des moteurs pas pas hybrides
Les moteurs pas pas hybrides runissent, au moins en partie, les avantages des moteurs pas
pas rluctance variable et aimants permanents, savoir :
-
un grand nombre de pas par tour,
une frquence propre mcanique importante,
un couple massique lev,
un amortissement interne important,
une mmoire de position.
Dans sa configuration de base le moteur pas pas hybride comporte un stator en fer feuillet
plots saillants et deux couronnes rotoriques dentes en matriau ferromagntique,
gomtriquement identiques et runies par un aimant permanent cylindrique magntis
axialement. Les lignes de champs de laimant se ferment travers les dents du rotor. Vu du
stator, le rotor prsente autant de ples magntiques actifs quil possde de dents. Les dents
sur une des couronnes sont dcales par rapport aux dents de lautre dun demi pas dentaire
1/2dr.
Le nombre de ples vu au stator est li au nombre de dents dune couronne rotorique par la
relation
p = N dr
7.27
Le nombre de pas par tour prend donc la forme
N pt = 2m N dr = 2mp
7.28
avec
p
Ndr
m
:
:
nombre de ples magntiques vu par le stator
Nombre de dents sur une couronne rotorique
nombre de phases (doit tre pair)
Laugmentation du nombre de plots statoriques aliments simultanment permet daugmenter
le nombre de dents du rotor, et donc de diminuer le pas angulaire du rotor. Le mme rsultat
sobtient par la subdivision des plots en plusieurs dents.
Les moteurs pas pas hybrides comptent parmi les moteurs pas pas les plus fabriqus. Ils
existent aussi bien en structure circuits simples (single stack), quen structure multiple
(multi stack) Dans presque tous les cas, les plots dents du stator prsentent le mme pas que
les dents aimantes du rotor
La Figure 7-24 illustre un tel moteur.
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 26
1'
2'
S
N
N
S
Aimant
Figure 7-24 : Moteur hybride (MH)
Le couple est constitu par la variation des permances mutuelles bobinages dents
aimantes du rotor (couple lectromagntique) et par un couple rluctant cre principalement
par la variation de la permance propre vu par les aimants (couple de dtente)
Les dents aimantes de chaque couronne rotorique sont perues par le stator comme autant
daimants permanents, linteraction de ces aimants avec les courants statoriques engendre un
couple lectromagntique identique celui du moteur pas pas aimants permanents, la
relation 7.25 reste donc valable.
7.2.4
Comparaison entre les trois types de moteurs pas pas
Le Tableau 7-2 donne une comparaison entre les divers types de moteurs pas pas.
Type de moteur
pas pas
Moteur
rluctance variable
Moteur aimants
permanents
Moteur hybride
Rsolution
(nb de pas par tour)
Bonne
Moyenne
Eleve
Couple moteur
Faible
Eleve
Eleve
Sens de rotation
Dpend :
- de lordre
dalimentation des
phases
Dpend :
- de lordre dalimentation
des phases
- du sens du courant dans
les bobines
Dpend :
- de lordre
dalimentation des
phases
- du sens du courant
dans les bobines
Frquence de travail
Grande
Faible
Grande
Puissance
Quelques Watts
Quelques dizaines de Watts
Quelques KWatts
Inconvnients
Pas de mmoire
de position
Tableau 7-2 : Comparaison des performances pour les trois types de moteurs pas pas
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
7.3
Page 27
MODE DE COMMANDE DES MOTEURS PAS PAS BIPHASS
La rotation du moteur seffectue par une squence dalimentation des divers enroulements de
phases en unipolaire ou en bipolaire. La gnration dun couple est intimement lie aux
courants circulant dans les phases. Chaque commutation entrane dune phase transitoire dont
la dure peut varier selon le type de contrle (tension ou courant). Dans cette section seul le
rgime quasi statique est tudi. Par quasi statique on entend le comportement du moteur
autour de ses points dquilibre. Pour des raisons pdagogiques et vu leur forte utilisation,
nous nous limiterons ici aux moteurs biphass et par consquent aux moteurs pas pas
aimants permanents et hybrides
7.3.1
Mode 1 : commande en pas entier, une phase ON
Une seule phase est alimente la fois par injection dun courant nominal In. Cest dans ce
mode que le fabricant dfinit le pas angulaire du moteur. La Figure 7-25 illustre la squence
des alimentations de phases pour un moteur aimants permanents.
u1, i 1
u2, i 2
Stator
S
N
Rotor
Figure 7-25 : Commande dans le mode 1
7.3.2
Mode 2 : commande symtrique en pas entier, deux phases ON
Deux phases du moteur sont alimentes simultanment par un courant nominal In. Le couple
moteur est multipli par 2 par rapport au contrle selon le mode 1. Le pas angulaire est
identique au mode 1 mais les positions dquilibre sont intermdiaires aux prcdentes. La
Figure 7-26 illustre la squence des alimentations de phases pour un moteur aimants
permanents.
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 28
u1, i 1
u2, i 2
Stator
Rotor
S
Figure 7-26 : Commande dans le mode 2
7.3.3
Mode 3 : commande asymtrique en demi pas, une ou deux phases ON
La combinaison en alternance du mode 1 et du mode 2 permet le fonctionnement en demi
pas. Pour effectuer un dplacement donn, il faut doubler le nombre dimpulsions de
commande. Les couples quasi statiques ne sont pas identiques selon si une ou les deux phases
sont alimentes. La Figure 7-27 illustre la squence des alimentations de phases pour un
moteur aimants permanents.
u 1, i 1
u 2, i 2
Stator
S
S
CD\SEM\Cours\Chap07
Figure 7-27 : Commande dans le mode 3
Rotor
LES MOTEURS PAS A PAS
7.3.4
Page 29
Mode 4 : commande symtrique en demi pas, une ou deux phases ON
Pour un fonctionnement rgulier en demi pas, il faut augmenter le courant dun facteur 2
lorsquune seule phase est alimente. On a ainsi les performances de couple du mode 2 mais
avec deux fois plus de pas. La Figure 7-28 illustre la squence des alimentations de phases
pour un moteur aimants permanents.
u 1, i 1
u 2, i 2
Stator
S
S
Rotor
Figure 7-28 : Commande dans le mode 4
7.3.5
Mode 5 : commande micro pas
Ce mode consiste multiplier les positions intermdiaires en asservissant le courant de
chaque phase. Il constitue une gnralisation du mode 4. Si lon contrle les courants de
phases dans le moteur selon les lois
i1 = 2 I n cos(e 0 )
i2 = 2 I n sin (e 0 )
7.29
Et en admettant des distributions des constantes de couple suivantes
K1 (e ) = KT sin (e )
K 2 (e ) = KT cos(e )
7.30
Le couple devient
T = 2 I n KT sin((e e 0 ) )
CD\SEM\Cours\Chap07
7.31
LES MOTEURS PAS A PAS
Page 30
e0 reprsente la position angulaire lectrique dquilibre pour des courants dfinis par les
relations 7.29. En donnant e0 n valeur quidistante de
2n
, on multiplie par n le nombre de
position dquilibre en mode 1.
On obtient apparemment une prcision aussi grande que lon veut, mais celle-ci na de sens
que si le couple de charge est trs bien connu et sans fluctuation. De plus, une telle prcision
ne peut tre atteinte quavec une loi de couple moteur parfaitement sinusodale, donc avec
des moteurs spcialement construits et avec une alimentation en courant trs prcise, parfois
ralise avec des amplificateurs de puissance linaires. Pour des moteurs classiques, le mode
5 permet une rotation continue entre deux positions dquilibre, en amortissant les
oscillations basse frquence de vitesse, causes de certaines instabilits dans une rotation
incrmentale.
En conclusion le mode 5, trs performant, nest pas conomique.
i1, i 2
8 9
7
6
5
4
3
2
1
Figure 7-29 : Commande dans le mode 5
7.3.6
Mode 6 : commande en auto commutation (utilisation dun capteur)
Dans ce mode un capteur compos de deux senseurs Hall est ncessaire pour dterminer la
position relative rotor stator du moteur pas pas. Le moteur est command en pas entiers
deux phases ON, la diffrence prs que les signes des courants sont dtermins par ltat
des sorties du capteur Hall. Le couple, basse vitesse, est donc donn par la relation
suivante :
T = 2 I n KT cos(2 N pas ) + sin(2 N pas )
7.32
On voit quil ny a pas de position dquilibre pour ce mode, le moteur est le sige dun
couple lectromagntique pulsant de valeur moyenne non nulle.
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 31
Cette commande est similaire celle dun moteur DC synchrone aimants permanents. La
Figure 7-30 illustre la relation existant entre les signaux du capteur Hall et la distribution des
constantes de forces. En pratique, le courant stablissant avec un certain retard dans les
phases, on va dcaler le capteur Hall dans le sens dune avance la commutation permettant
ainsi daugmenter la vitesse de rotation maximum du moteur.
Figure 7-30 : Commande dans le mode 6
7.4
7.4.1
COMPORTEMENT STATIQUE
Position dquilibre
Pour des raisons didactiques, on se limitera dans cette section aux moteurs pas pas biphass
dont la caractristique de couple permet de faire les hypothses suivantes :
1. le couple de dtente est ngligeable par rapport au couple lectromagntique lorsque le
courant nominal circule dans une ou les deux phases,
2. les constantes de couple de phases KTk (k=1, 2) prsentent des distributions sinusodales.
Si une phase du moteur est alimente, lautre tant ouverte, et que le moteur est le sige dun
couple rsistant externe, on peut poser la relation :
J
2
= Tm Tr
t 2
7.33
avec
J
Tm
Tr
:
:
:
CD\SEM\Cours\Chap07
moment dinertie rapporte au rotor de lensemble des parties tournantes
couple moteur (couple lectromagntique)
Couple rsistant agissant sur le rotor immobile
LES MOTEURS PAS A PAS
Page 32
Figure 7-31 : Couple en fonction de la position angulaire pour une phase alimente
Lquilibre impose une galit du couple moteur et du couple rsistant. La Figure 7-31
montre lallure des deux couples en prsence en fonction de la position angulaire lectrique
du rotor (la position angulaire mcanique est obtenue par la relation m=4/Npt e).
Lcart de position par rapport la position dquilibre sexprime par
T
equilibe = e e 0 = arcsin r
Tm
7.34
Lquilibre nest possible que si le couple rsistant Tr a une amplitude infrieure Tm
(Tmaintien sur la Figure 7-31) que lon appelle couple de maintien.
On appelle raideur la pente de la courbe de couple la position dquilibre. A couple
rsistant nul, sa valeur absolue est gale Tmaintien.
7.4.2
Condition pour le dplacement dun pas
Lorsque le moteur, avec une seule phase alimente, se trouve en position dquilibre, il est
possible de se dplacer dun pas en alimentant la phase ouverte et en ouvrant la phase
alimente. On fait ici lhypothse que les courants stablissent instantanment dans le
moteur. Le nouveau couple moteur prsente alors une courbe similaire la prcdente mais
dcale dun pas en avant (/2 lectrique). Selon les couples en prsences, le moteur pourra
avoir deux comportements distincts.
-
A linstant de la commutation le couple moteur Tj+1 est suprieur au couple rsistant
Tr1 ; le moteur va donc effectivement se dplacer dun pas et se stabiliser aprs des
oscillations autour de la nouvelle position dquilibre.
A linstant de la commutation, le couple moteur Tj+1 est infrieur au couple rsistant
Tr2 et le moteur va partir dans le sens oppos celui dsir pour ne plus sarrter.
La sparation de ces deux cas a lieu pour une valeur du couple rsistant gale au couple de
dmarrage Td. Ce couple correspond lintersection des caractristiques de couple de chaque
phase.
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 33
Figure 7-32 : Couples en jeu lors du dplacement dun pas
7.5
7.5.1
COMPORTEMENT DYNAMIQUE
Gnralits
Pour interprter lvolution oscillatoire lors dun dplacement dune position dquilibre
une autre, il faut faire intervenir :
7.5.2
le couple de frottement visqueux Fvisqueux qui englobe toutes les pertes mcaniques et
lectriques proportionnelles la vitesse de rotation,
Le frottement sec Ffrot dpendant du signe de la vitesse de rotation mais pas de son
amplitude,
Le couple rsistant, constant quelque soit la vitesse et son signe.
Dplacement autour dune position dquilibre
Le couple moteur de la relation 7.31 volue en fonction de la configuration de lalimentation
du moteur. En prenant pour origine la position ej0 dquilibre vide correspondante /2,
on obtient une quation gnrale unique :
T = Tmot Tvisqueux T frot Tr = J
t 2
2
7.35
ou sous une forme dtaille
m
m
.
Tmaintien cos(e ) CV
T f sign ( m ) Tr = J
2
144244
3 1
t
t
4
2
4
3
1
42
4
43
4
T
2
mot
CD\SEM\Cours\Chap07
Tvisqueux
T frot
7.36
LES MOTEURS PAS A PAS
Page 34
On obtient donc la forme gnrale suivante
m
m
J
+ CV
Tmaintien cos(e ) = T f sign( m ) Tr .
2
t
t
t
2
7.37
Langle lectrique e est li langle mcanique m par la relation
m = ne .
7.38
o n reprsente le nombre de priodes de commutation par rvolution (pour un moteur
biphas, une priode de commutation comprend quatre pas)
J
nTmaintien
Tf
2e
e
CV
Tr
+
cos(
)
=
sign( e )
.
e
2
t
nTmaintien t
Tmaintien
Tmaintien
t
7.39
Cette relation peut tre crite sous une forme plus explicite, soit
2
1 e 2 e
+
cos(e ) = sign( e ) .
2
2
n t
t
n t
7.40
avec
pulsation mcanique propre
: n =
amortissement :
: =
couple de frottement rapport
au couple de maintien
couple rsistant rapport
au couple de maintien
:=
: =
nTmaintien
J
CV
2 nJTmaintien
Tf
7.41
Tmaintien
Tr
Tmaintien
Les solutions de lquation diffrentielle non linaire 7.40 sont obtenues pas simulation. La
Figure 7-33 illustre le schma bloc correspondant la modlisation du moteur.
Dans le but de prsenter des rsultats facilement exploitables, il est judicieux de passer des
grandeurs rduites (relations 7.41).
On prendra pour exemple un moteur hybride 200 pas par tour, aliment en mode 1. Il
prsente les caractristiques suivantes :
n=50
Tmaintien=0.42 Nm
J=120 gcm2
CV=3.210-3Nm/(rad s)
[1]
[1]
CD\SEM\Cours\Chap07
:
:
:
:
:
:
nombre de priodes lectriques par tour (Npt/4)
couple de maintien
inertie des parties tournantes rapportes au rotor
constante de couple visqueux
couple de frottement Ff rapport au couple de maintien Tmaintien
couple rsistant rapport au couple de maintien Tmaintien
LES MOTEURS PAS A PAS
Page 35
d e
dt 2
de
dt
e
1
s
2
n
n2
cos
Figure 7-33 : Modlisation autour dune position dquilibre
La Figure 7-34 illustre le cas dun mouvement lorsque la position initiale est dcale dun
angle lectrique de /2
Figure 7-34 : Dplacement dun pas ( n = 8000, = 0.05, = 0, = 0 )
Les Figure 7-35 Figure 7-38 montrent les effets de chaque paramtre de lquation
diffrentielle non linaire 7.40
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 36
4000
, = 0.05, = 0, = 0 )
8000
Figure 7-35 : Effet de la pulsation propre ( n =
0.05
, = 0, = 0 )
0
.
1
Figure 7-36 : Effet du couple visqueux ( n = 8000, =
Pour les deux cas qui prcdent, on voit que la position statique ne prsente pas derreur
puisque le frottement sec et le couple rsistant externe sont nuls. Les Figure 7-37 et Figure
7-38 illustrent ces cas de fonctionnements.
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 37
Figure 7-37 : Effet du frottement sec ( n = 8000, = 0.05, =
, = 0)
0.1
Figure 7-38 : Effet du couple rsistant ( n = 8000, = 0.05, = 0, =
0.2
On voit, laide des figures prcdentes, quun important frottement sec () est trs
prjudiciable la prcision de positionnement. Seul un surdimensionnement du moteur, ou
lutilisation dun rducteur, permet de diminuer cette influence.
7.5.3
Modlisation complte du moteur
Comme nimporte quel actuateur, le moteur pas pas m phases peut tre modlis de
manire simple grce aux relations lectriques et aux quations de mouvements suivantes :
Tension aux bornes dune phase (bobine)
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 38
U k = Rik +
k
t
k = 1,...m .
7.42
avec
na
nb
k
= bkbl + bkaj
t
t l =1
j =1
424
3
1
24
3
1
Bobine
Bobines
Bobine
Aimants
n
na
b
= bkbl + bkaj =
t l =1
j =1
i
= Lkl l +
t
l =1
nb
na
il nb Lkl
il + bkaj
Lkl
+
t
t l =1 t
l =1
j =1
nb
Lkl m
m
il + bkaj
m t
m t
=1
l =1
1l4
42
443 1
424
3
nb
na
il
t
l k
1
424
3
nb
kl
7.43
K Ek ( m )
0 par construction
i
Lkk k
t
123
+ K Ek (m )
Inductance propre
Inductances mutuelles
Pour un moteur biphas, on obtient donc
i1
+ K E1 (m )
t
.
i2
u2 = Ri2 + L22
+ K E 2 (m )
t
u1 = Ri1 + L11
7.44
Couple moteur
Tm =
1
2
n a + nb
n =1
na + nb nm
=
in
m =1 m
b
a
bkbl 1 a
1
aiaj
= ik
+ ai
+
2 k =1 l =1 m
2 i =1
m
j =1
144444424444443
nb
Couple de dtente
bkai
i
m k
k =1 j =1
1424
3
KTk (m )
144
2443
nb
na
7.45
Couple lectromagntique
Pour un moteur biphas, on obtient :
na
Tm = Tdtente (ik , m ) + ai
i =1
na
b1ai
b 2 ai
i1 + ai
i
m
m 2
i =1
7.46
= Tdtente (ik , m ) + K T 1 (m )i1 + K T 2 (m )i2
Equation de mouvement
Tem Tdtente T frot Tvisqueux = J
CD\SEM\Cours\Chap07
m
t
7.47
LES MOTEURS PAS A PAS
Page 39
avec
Tem = K T 1 (m )i1 + K T 2 (m )i2
1
424
3
1
424
3
K T sin( nm )
KT cos( nm )
7.48
T frot = T f sign( )
Tvisqueux = CV
A laide des relations 7.44, 7.47 et 7.48, il est possible de construire le modle de simulation
dun moteur pas--pas biphas de type aimants permanents (PM) ou hybride (HM)
-sin(n m)
KE
u1
u i1
Rsistance et
inductance
de phase
Tm1
1/R
1+sL/R
Distribution normalise
de K E et K T
KT
i1
Tm
T dtente ( m )
1/R
1+sL/R
u i2
KE
Inertie
Tf
i2
Frottement sec
T m2
Rsistance et
inductance
de phase
Couple de dtente
u2
CV
KT
Frottement visqueux
cos(n m )
Distribution normalise
de K E et K T
Figure 7-39 : Effet du couple rsistant
Le couple de dtente est difficilement mesurable, on effet, il est possible de mesurer le couple
sans courant correspondant linteraction entre aimants (couple rluctant aimants - aimants)
mais par contre la contribution du couple rluctant entre bobines nest pas mesurable
directement. Dans la pratique, le couple de dtente est souvent dfinit comme le couple
rluctant entre aimants seulement.
7.5.4
La commande en tension.
Deux types de commande en tension sont utiliss. La diffrence se situe lors de la commande
OFF dune phase. En effet il est possible
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 40
douvrir la phase dans ltat OFF (ik=0),
de court-circuiter la phase dans ltat OFF (uk=0).
Le comportement dynamique du moteur est directement dpendant de la commande et mrite
dtre tudi.
Figure 7-40 : Cas dun dplacement plein pas, une phase ON
La Figure 7-40 met en valeur la diffrence de rponse obtenir lors du dplacement dun pas
avec une phase active et une phase ouverte ou avec une phase active et une phase courtcircuite. On voit que cest principalement lamortissement () et la frquence propre (n)
qui est diffrent dans les deux cas. En effet, pour une phase court-circuite (ukOFF=0), un
courant, gnr par la tension induite de mouvement produit un couple oppos au
mouvement et fonction de la vitesse. On se trouve donc en prsence dun couple de type
visqueux.
Pour assurer une dynamique acceptable, il est souvent ncessaire dajouter des rsistances en
srie avec chaque phase afin de diminuer les constantes de temps lectriques. Dans ce cas, les
tensions appliques aux bornes des phases sont augmentes afin dobtenir le courant nominal
de phase dsir.
7.5.5
La commande en courant
Le couple lectromagntique tant directement proportionnel au courant circulant dans les
phases et la distribution des constantes de couple, il parat judicieux de travailler en
asservissement de courant. Dans ce cas, le modle de simulation prend la forme illustre la
Figure 7-42.
CD\SEM\Cours\Chap07
LES MOTEURS PAS A PAS
Page 41
-sin(nm )
Rgulateur
de
courant
ic1
Kp
Variateur
de
courant
K cm
1+sTi
sT i
KE
u1
u i1
Rsistance et
inductance
de phase
T m1
1/R
1+sL/R
1+sTcm
Distribution normalise
de K E et K T
KT
i1
K mi
Mesures de courants
T dtente ( m )
K cm
K p 1+sTi
sT i
1+sTcm
Rgulateur
de
courant
Variateur
de
courant
1
Inertie
Tf
u2
1/R
1+sL/R
u i2
KE
Rsistance et
inductance
de phase
i2
Frottement sec
T m2
CV
KT
Frottement visqueux
cos(nm)
Distribution normalise
de K E et K T
Figure 7-41 : Commande plein pas, une phase ON
CD\SEM\Cours\Chap5.doc
Couple de dtente
K mi
ic2
Tm
Page 42
LES MOTEURS PAS A PAS
Comme pour la commande en tension, il faut distingue deux cas pour le mode pas pas une
phase ON. En effet, la phase non active peut tre soit ouverte (ik=0) soit court-circuite
(uk=0). La Figure 7-42 illustre bien la diffrence de comportement.
Figure 7-42 : Commande plein pas, une phase ON
Pour la commande pas pas deux phase ON, il nexiste quune seule possibilit. En effet
dans ce cas chaque phase est en permanence parcourue par le courant nominal.
La commande asymtrique en demi pas, une ou deux phases ON mrite galement dtre
aborde. Dans ce cas, les pas entiers sont soit raliss avec une phase ouverte (ik=0) ou
ferme (uk=0).
Figure 7-43 : Commande asymtrique en demi-pas
CD\SEM\Cours\Chap7.doc
Page 43
LES MOTEURS PAS A PAS
On a donc une squence de mouvement par demi pas avec des comportements dynamiques
trs diffrents selon le type de commande.
La Figure 7-44 illustre le cas de la commande en micro pas. Le nombre de micro pas, pour un
dplacement angulaire monotone croissant respectivement dcroissant est fonction de la
qualit de construction du moteur.
Figure 7-44 : Commande en micro-pas
Si le moteur possde un capteur daide la commutation, il est possible de commander le
moteur comme un moteur DC sans collecteur. La Figure 7-45 montre une manire dobtenir,
laide dune consigne globale de courant, les consignes de courants correspondant aux deux
phases du moteur.
ic1
Moteur contrl
en courant
ic
ic2
-sin(nm+ )
cos(nm+ )
Figure 7-45 : Cration des consignes de courants de phases
Lasservissement en courant de chaque phase correspond un contrle de couple. Le moteur
va donc tre soumis une acclration. Lorsque le couple rsistant (charge + frottement sec
CD\SEM\Cours\Chap7.doc
Page 44
LES MOTEURS PAS A PAS
et visqueux) est gal au couple moteur, ce dernier tourne alors vitesse moyenne constante.
La vitesse instantane prsente une ondulation due la forte variation de couple dont
lorigine est explique ci-dessous.
La Figure 7-46 montre les courants de phases thoriques. On distingue facilement
laugmentation de la frquence donne par le capteur daide la commutation
Figure 7-46 : Consignes de courants et courants de phases
Le courant prsente de fortes ondulations lorsque la vitesse augmente. Ce phnomne est d
laugmentation de la tension induite de mouvement de phase qui est la grandeur
perturbatrice de la boucle dasservissement de courant. Le couple lectromagntique prsente
galement une forte ondulation.
Figure 7-47 : Couple moteur et couple rsistant (couple visqueux)
CD\SEM\Cours\Chap7.doc
Page 45
LES MOTEURS PAS A PAS
La diffrence entre le couple magntique et le couple rsistant est utilise pour acclrer le
moteur. Lorsque la moyenne de ces couples est gale, le moteur atteint un rgime de vitesse
moyenne constante. La Figure 7-48 illustre parfaitement de cas.
Figure 7-48 : Evolution de la vitesse et de la position
7.5.6
Amortissement du mouvement sur un pas
Lvolution naturelle sur un pas (Figure 7-42 (ikOFF=0)) prsente un rgime oscillatoire
amorti. Si de telles oscillations sont inadmissibles, laugmentation de lamortissement grce
ladjonction dun frottement visqueux supplmentaire permet de se rapprocher dun rgime
apriodique. Un amortissement lectrique est obtenu, pour les moteurs aliments en tension,
en effet les courants induits dans les enroulements crent un couple de freinage. Les solutions
proposes ci-dessus rduisent considrablement les performances du moteur aux frquences
leves. Le meilleur procd consiste diminuer les oscillations par la commande ellemme. Si le moteur est aliment en courant, une commande en micro pas (7.3.5) diminue
les oscillations et supprime les rsonances. Dans les autres cas, si lon dsire un dplacement
sans dpassement, on utilise le freinage lectrique. Cette technique consiste acclrer et
freiner sur le mme pas. Les Figure 7-49 et Figure 7-50 illustrent le principe de cette
commande. Le moteur, en position dquilibre est aliment par un courant positif dans la
phase 1. linstant initial, lalimentation est commute sur la phase 2 pour crer un couple
acclrateur. Aprs un temps ta cest--dire une position proche de la nouvelle position
dquilibre, on freine le moteur en commutant la phase 1, afin que le rotor atteigne la position
finale vitesse nulle linstant td; il suffit alors de commuter lalimentation sur la phase 2
pour maintenir la nouvelle position. La prdtermination des temps ta dacclration et td de
dclration peut tre ralise par simulation numrique. Ces temps de commande optimale
dpendent des paramtres mcaniques du dispositif. Le temps rduit tr=ta+td apparat presque
constant dans une large plage de variations de la charge.
CD\SEM\Cours\Chap7.doc
Page 46
LES MOTEURS PAS A PAS
Figure 7-49 : Freinage lectrique sur un pas (volution temporelle)
Figure 7-50 : Freinage lectrique sur un pas (trajectoire rapporte au couple angulaire)
7.6
7.6.1
DOMAINE DE FONCTIONNNEMENT DES MOTEURS PAS PAS
Comportement aux basses vitesses
7.6.1.1 Rsonance
La commande vitesse constante trs basse peut conduire des phnomnes de rsonance
qui entranent des pertes de synchronisme pour certains moteurs. tudions, sur la Figure
CD\SEM\Cours\Chap7.doc
Page 47
LES MOTEURS PAS A PAS
7-51, lvolution oscillante qui passe par un maximum que lon notera mmax(j+1) et par un
minimum mmin(j+1).
Figure 7-51 : Dtail de la transition entre deux pas
La commutation vers le pas suivant peut arriver la position mC(j+1) pour laquelle la vitesse
du rotor est ngative, et lnergie cintique emmagasine sera note WCin. De mC(j+1)
mmin(j+2), le rotor est frein par le couple acclrateur rsultant de la diffrence entre le
couple moteur et le couple rsistant. Lnergie de freinage Wf mise en uvre est donne par :
m min( j + 2 )
Wf =
(T
m( j + 2)
Tr dm
7.49
mC ( j +1 )
Lnergie Wf, compense exactement lnergie cintique WCin du rotor la position mmin(j+2) .
'
Lnergie maximale de freinage W f est obtenue si
m min( j + 2 ) = 'm min( j + 2 )
7.50
La condition de fonctionnement synchrone scrit donc :
'
W f < WCin
7.51
Si cette condition nest pas satisfaite, le moteur continue sa rotation en sens inverse et entre
dans un fonctionnement erratique. Une simulation du comportement dynamique permet de
dterminer les instants (ou les positions) de commutation conduisant cette perte de
synchronisme. Selon lamortissement du moteur (frottement statique ou dynamique), on ne
trouve aucun domaine instable, un seul, ou plusieurs. Ce phnomne de rsonance peut se
produire galement quand la frquence de commande Fp = 1/Tp est voisine de la frquence
naturelle n/2 ou de ses sous-multiples.
CD\SEM\Cours\Chap7.doc
Page 48
LES MOTEURS PAS A PAS
Figure 7-52 : Couple lectromagntique en jeu
La Figure 7-53 montre une perte de synchronisme au dmarrage, ceci pour une frquence de
commande nettement infrieure la frquence maximum de dmarrage. Il peut exister
plusieurs zones de frquence ou la perte de synchronisme est possible. Ces domaines
changent en fonction du type de commande et de linertie rapporte au rotor.
Figure 7-53 : Dmarrage sur une frquence proche de la rsonance
Pour une inertie constante, les domaines de rsonance peuvent tre matrialiss avec les
courbes Tr(Fp) par les zones grises de la Figure 7-58. Ces courbes passent pour Fp= 0 pour le
point reprsentatif du couple de dmarrage Td . Dans un grand nombre dapplications o le
moteur tourne vitesse moyenne, ces domaines doscillations trs basses frquences ne
sont pas gnants. Si cela est ncessaire, leur suppression passe par laccroissement de
CD\SEM\Cours\Chap7.doc
Page 49
LES MOTEURS PAS A PAS
lamortissement (augmentation des frottements ou rduction du couple moteur) ou par une
commande spciale telle que le mode 5 (micro pas) ou le freinage lectrique (7.5.6).
7.6.1.2 Frquence limite de dmarrage
Une premire utilisation dun moteur pas pas consiste commander un nombre de pas
donn frquence constante ; les premires commutations surviennent pour des angles
parcourus toujours plus faibles que le pas. La Figure 7-54 montre un dmarrage russi, ceci
proche de la frquence limite de dmarrage
Figure 7-54 : Dmarrage proche de la frquence maximum
Lorsque le couple acclrateur reste ngatif aprs les quelques premiers pas, le moteur ne
peut plus assurer le dmarrage.
La Figure 7-55 montre le cas ou la frquence de la commande est telle que le couple moteur
passe alternativement dune valeur positive une valeur ngative
Figure 7-55 : Dmarrage au del de la frquence maximum
CD\SEM\Cours\Chap7.doc
Page 50
LES MOTEURS PAS A PAS
Dans ce cas le moteur peut se mettre tourner de manire erratique. Le mouvement prsente
de forte oscillation et la vitesse moyenne est infrieure celle donne par la frquence de
commutation impose par la commande. Il y a donc perte de pas.
Figure 7-56 : Mouvement avec forte ondulation suite une frquence de dmarrage trop leve
On peut dfinir une frquence limite de dmarrage Fd pour chaque valeur du couple rsistant.
Pour un couple de charge nul, on obtient la frquence maximale de dmarrage Fdmax. La
courbe reprsentant Fd pour diffrentes valeurs du couple rsistant dlimite sur la Figure 7-58
la zone I darrt-dmarrage (start-stop ). Cette courbe dpend du moment dinertie J; elle est
en gnral donne pour le moteur seul. Si un moment dinertie important est rapport au
rotor, la zone I devra tre rduite
7.6.1.3 Comportement aux vitesses leves
Un moteur dmarr dans la zone darrt dmarrage peut tre acclr en accroissant
progressivement la frquence des impulsions de commande.
En rgime tabli, il se cre un quilibre entre le couple moteur moyen et le couple rsistant
par ajustement de la position des commutations. Cette position est repre par rapport la
position dquilibre vide pour la mme configuration dalimentation par langle appel
angle de commutation. Le couple moteur moyen, gal la moyenne sur un pas du couple
moteur instantan, dpend de cet angle selon la relation :
Tm =
CD\SEM\Cours\Chap7.doc
2 I n KT
sin(
+)
7.52
Page 51
LES MOTEURS PAS A PAS
Figure 7-57 : Point de fonctionnement (vitesse constante)
7.6.1.4 Frquence limite absolue
Les considrations prcdentes supposent toujours que les courants respectent les formes
thoriques de la Figure 7-25. Or, haute vitesse, la dure des pas se rapproche de celle des
rgimes transitoires lectriques. Tenant compte de la forme relle des courants, il apparat,
par rapport la thorie une diminution du couple moteur moyen. Si lon continue acclrer,
le synchronisme sera rompu. Le moteur a ainsi atteint sa frquence limite absolue. Cette
limite dpend de la charge, de lalimentation, mais ne dpend pas de linertie. La Figure 7-58,
reprsente, pour diffrentes charges, la frquence limite absolue Fplim (avec Fplim[max]
frquence maximale dentranement). Le domaine II quelle dlimite est appel domaine
dentranement ou de survitesse. Lexploitation de ce domaine ncessite une acclration ou
une dclration progressive.
Couple
Zone de rsonance
I Zone de arrt - dmarrage
II Zone d'entranement
III Zone d'instabilit
Td
II
Tr
III
I
II
I
F dLim F dLim[max]
F aLim
F aLim[max]
Figure 7-58 : Domaines de fonctionnement
CD\SEM\Cours\Chap7.doc
Fp
LES MOTEURS PAS A PAS
Page 52
7.6.1.5 Instabilits dynamiques
Pour des frquences leves de la zone II, certains moteurs prsentent des oscillations basse
frquence autour de la vitesse moyenne correspondant la frquence de commutation. Ces
oscillations de quelques dizaines de hertz se traduisent par une oscillation de lamplitude des
courants qui peut entraner le dcrochage du moteur. Cela se traduit par une anomalie (zone
III) de la caractristique de frquence limite absolue.
CD\SEM\Cours\Chap7.doc
LES MOTEURS PAS A PAS
Bibliographie
[1]
TRAITE D ELECTRICITE
ELECTROMECANIQUE
Volume IX
Auteur : Prof. Marcel Jufer
ISBN 2-88074-285-4
[2]
MAGNA PHYSICS PUBLICATIONS OXFORD SCIENCE PUBLICATION
DESIGN OF BRUSHLESS PERMANENT MAGNET MOTORS
Auteurs : J.R. Hendershot Jr and Tje Miller
ISBN 1-881855-03-1
[3]
OXFORD UNIVERSITY PRESS
STEPPING MOTORS AND THEIR MICROPROCESSOR CONTROLS
Auteurs : Takashi Kenjo and Akira Sugawara
ISBN 0-19-859385-6
[4]
ECOLE POLYTECHNIQUE FEDERALE DE LAUSANNE
ENTRAINEMENTS ELECTRIQUES II
Auteur : Dr Nicolas Wavre
CD\SEM\Cours\Chap7.doc
Page 53
Vous aimerez peut-être aussi
- CAPTEURS Capteurs AutomobileDocument33 pagesCAPTEURS Capteurs AutomobileMouncef El Marghichi100% (4)
- Cours B À VitesseDocument55 pagesCours B À Vitesseabdo tm100% (2)
- Rappels Traitement Du SignalDocument29 pagesRappels Traitement Du Signalelectroblida100% (16)
- TD1 Arcgis 3a Pist 2014 2015Document78 pagesTD1 Arcgis 3a Pist 2014 2015Jaouad Id BoubkerPas encore d'évaluation
- Cours Synthèses Convertisseurs StatiquesDocument4 pagesCours Synthèses Convertisseurs StatiquesMouncef El MarghichiPas encore d'évaluation
- Exploitation Phosphates de Matam Pour EngraisDocument16 pagesExploitation Phosphates de Matam Pour EngraissakhoibPas encore d'évaluation
- Renforcement CarboneDocument40 pagesRenforcement Carbonehne100% (1)
- TP Ecolexx SQL LDDDocument3 pagesTP Ecolexx SQL LDDapi-26420184Pas encore d'évaluation
- Base de Donnees Distribuees-3Document88 pagesBase de Donnees Distribuees-3Amin MohammedPas encore d'évaluation
- Le DéveloppementDocument6 pagesLe Développementmokademamina100% (1)
- Physique 24102023Document1 pagePhysique 24102023Mouncef El MarghichiPas encore d'évaluation
- Example PEDocument3 pagesExample PEMouncef El MarghichiPas encore d'évaluation
- Example PE 2Document2 pagesExample PE 2Mouncef El MarghichiPas encore d'évaluation
- Série Exercices1Document5 pagesSérie Exercices1Mouncef El Marghichi100% (3)
- Devoir N° 2: ATC (G1)Document1 pageDevoir N° 2: ATC (G1)Mouncef El MarghichiPas encore d'évaluation
- Automgen GrafcetDocument6 pagesAutomgen GrafcetMouncef El Marghichi0% (1)
- FR Brochure Dossier Systemes Sous Couverture Sarnafil MTDocument32 pagesFR Brochure Dossier Systemes Sous Couverture Sarnafil MTCisse ModiboPas encore d'évaluation
- Fast FoodDocument5 pagesFast FoodDhab YoussefPas encore d'évaluation
- NitinolDocument4 pagesNitinolNader FarhatPas encore d'évaluation
- CV Hamid El Metalsy VRDDocument1 pageCV Hamid El Metalsy VRDHamid BtpPas encore d'évaluation
- Les Techniques D'ordonnancementDocument22 pagesLes Techniques D'ordonnancementSaf Bes83% (6)
- Procédure Gestion Et Conduite Des Chaudières À VapeurDocument6 pagesProcédure Gestion Et Conduite Des Chaudières À VapeurAnis SelmiPas encore d'évaluation
- Stratégie de Dassault AviationDocument3 pagesStratégie de Dassault AviationJulienPanero-JollivetPas encore d'évaluation
- CERTU-Recommandations Pour L'evaluation Socio-Economique Des Projets TCSP PDFDocument147 pagesCERTU-Recommandations Pour L'evaluation Socio-Economique Des Projets TCSP PDFAlexandros Gi100% (1)
- TÉLÉCHARGER LIRE DOWNLOAD READ. Description. EUROCODE 3 en 1993 - Exemples D - Application Au Calcul Des Structures en Acier PDF - Télécharger, LireDocument9 pagesTÉLÉCHARGER LIRE DOWNLOAD READ. Description. EUROCODE 3 en 1993 - Exemples D - Application Au Calcul Des Structures en Acier PDF - Télécharger, LireIssam ChemlalPas encore d'évaluation
- CiscoDocument53 pagesCiscoeagleeye01Pas encore d'évaluation
- Semelle 2Document32 pagesSemelle 2lezardPas encore d'évaluation
- Associations Convertisseurs-Machines2Document22 pagesAssociations Convertisseurs-Machines2Sofiane DouidaPas encore d'évaluation
- Medifa - 400508Document17 pagesMedifa - 400508jose alvarezPas encore d'évaluation
- Contact LinkyDocument1 pageContact LinkyYao N'GoranPas encore d'évaluation
- 02 Blickle Guide FRDocument1 page02 Blickle Guide FRJezB1234Pas encore d'évaluation
- Curation de ContenuDocument5 pagesCuration de Contenunenne2014Pas encore d'évaluation
- Manual ToyotomiDocument14 pagesManual ToyotomiMauricio Catalan Diaz50% (2)
- 209032354XDocument6 pages209032354XPao AnPas encore d'évaluation
- Exposé CensureDocument5 pagesExposé CensureMaryem BaddoujPas encore d'évaluation
- CAPREC 2018 - Programme ProvisoireDocument4 pagesCAPREC 2018 - Programme ProvisoireAnonymous IMCwLzxUAPas encore d'évaluation
- Aop A FaireDocument5 pagesAop A FaireSouley TANKOANOPas encore d'évaluation
- Extraire Contenu PDF PHPDocument2 pagesExtraire Contenu PDF PHPCoryPas encore d'évaluation
- TD5 2020Document5 pagesTD5 2020Hassan Chehouani100% (1)