Académique Documents
Professionnel Documents
Culture Documents
COURS ELN2 Premier Semestre
COURS ELN2 Premier Semestre
Transféré par
Manel BenhissiCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
COURS ELN2 Premier Semestre
COURS ELN2 Premier Semestre
Transféré par
Manel BenhissiDroits d'auteur :
Formats disponibles
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
PHENOMENES DE PROPAGATION EN RADIOFREQUENCES
ELECTRONIQUE RAPIDE
COURS
Philippe Ferrari
-0-
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
SOMMAIRE
1
INTRODUCTION
1.1
1.2
1.3
1.3.1
1.3.2
1.4
2
PRAMBULE : MISE EN VIDENCE DES PHNOMNES DE PROPAGATION EN LECTRONIQUE
LES FRQUENCES MICRO-ONDES
APPLICATIONS DES ONDES LECTROMAGNTIQUES
HISTORIQUE
QUELQUES APPLICATIONS TYPIQUES
CIRCUITS MICRO-ONDES ET MTHODES DANALYSE
LA LIGNE DE PROPAGATION ANALYSE PAR LA THORIE DES CIRCUITS
2.1 MODLE CIRCUIT DUNE LIGNE DE PROPAGATION
2.2 EQUATIONS DIFFRENTIELLES COUPLES
2.3 RGIME HARMONIQUE
2.3.1 EQUATIONS DE PROPAGATION
x
v
2
3
4
4
5
7
9
9
10
11
11
x
f t +
v
2.3.2
ETUDE GNRALE DES FONCTIONS f t
2.3.3
CARACTRISTIQUES DES ONDES : IMPDANCE CARACTRISTIQUE, EXPOSANT DE PROPAGATION,
ET
13
2.3.4 COEFFICIENTS DE RFLEXION ET DE TRANSMISSION RAPPORT DONDES STATIONNAIRE (ROS)
2.4 ADAPTATION DIMPDANCE
2.4.1 ADAPTATION PARTIE RELLE : TRANSFORMATEUR DONDE
2.4.2 ADAPTATION PARTIE IMAGINAIRE : STUB
2.5 OUTILS DANALYSE : ABAQUE DE SMITH PARAMTRES S GRAPHES DE FLUENCE
2.5.1 ABAQUE DE SMITH
2.5.2 PARAMTRES S - MATRICES
2.5.3 GRAPHES DE FLUENCE
2.6 INTRODUCTION AU RGIME TEMPOREL : RFLECTOMTRIE TEMPORELLE
2.6.1 PRINCIPE
15
17
21
21
21
22
22
31
37
39
39
44
COEFFICIENT DE RFLEXION
3.1
3.2
4
PRINCIPES DE LA CAO RF-ONDES
MODLISATION
SIMULATION
44
45
PRINCIPES DES APPAREILS DE MESURE RF-ONDES
Philippe Ferrari
-1-
45
IUT 1 Grenoble
Philippe Ferrari
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
-1-
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
1 Introduction
1.1 Prambule : mise en vidence des phnomnes de propagation en
lectronique
Il sagit ici de montrer que lorsque la frquence des signaux se propageant sur une ligne
augmente, il devient ncessaire de prendre en compte les phnomnes de propagation.
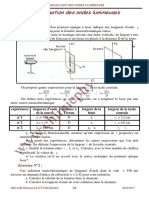
Nous prenons une exprience trs simple qui consiste relier un gnrateur de tension sinusodale
( vg , Rg ) une charge Rc par lintermdiaire de deux fils parallles A-B et C-D (Figure 1). La
charge est relie un voltmtre par un cble coaxial de un mtre de longueur environ (longueur l).
l 1m
A
Rg
Vg
C
Vlue
Rc
D
Figure 1. Mise en oeuvre des phnomnes de propagation.
Compte tenu de la longueur des fils de connexion, si la frquence du gnrateur est infrieure 1
MHz environ, la tension lue au voltmtre est videmment :
Vlue = Vg
Rc
.
Rc + Rg
Lorsque lon augmente la frquence tout en conservant la tension efficace Vg constante, on constate
que la tension lue varie. Si lon divise la longueur l par dix, soit un cble coaxial de longueur 10 cm,
on constate que ce phnomne se produit pour une frquence dix fois suprieure. La tension lue au
voltmtre dpend donc de la longueur du cble coaxial et de la frquence de fonctionnement.
Pour comprendre ce phnomne, il faut faire appel la thorie de la propagation des ondes
lectromagntiques que nous allons dvelopper. On peut dj affirmer que pour viter les
phnomnes de propagation dans les circuits lectroniques, il faut que la dimension de ces
circuits soit plus petite que la longueur associe la longueur donde des signaux mis en
jeu :
v
,
f
avec v la vitesse des signaux et f leur frquence.
Plus la frquence crot, plus la longueur donde diminue, plus les phnomnes de propagation sont
susceptibles dintervenir. Ds lapparition de la miniaturisation apporte par la microlectronique
vers les annes 1960, les lectroniciens ont cru longtemps quils allaient pouvoir viter les mthodes
lourdes danalyse lectromagntique qui permettent de prendre en compte les phnomnes de
propagation. Mais les ambitions des lectroniciens ne se sont pas limites qu la miniaturisation
des circuits. Du fait du besoin accru de plages de frquences libres pour les applications de
tlcommunication, les frquences de fonctionnement ont augment. De plus, la complexit de
larchitecture des circuits entrane des couplages entre circuits qui ne peuvent se traiter que grce
la thorie de llectromagntisme. Aucun lectronicien ne peut ignorer aujourdhui les concepts de
base de llectromagntisme qui interviennent dans lanalyse des circuits dlectronique rapide.
Philippe Ferrari
-2-
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Dans le domaine de llectronique rapide, nous considrons des frquences suprieures la centaine
de MHz. Nous entrons alors dans le domaine des micro-ondes ou des hyperfrquences, allant de
quelques centaines de MHz quelques centaines de GHz (109 Hz). Au-del des GHz, on trouve les
THz (1012 Hz).
1.2 Les frquences micro-ondes
Le terme micro-ondes est utilis pour dcrire les ondes lectromagntiques allant de 1 cm
1 m dans lair, correspondant des frquences situes entre 300 MHz et 300 GHz. Dans un milieu
diffrent de lair, donc de permittivit relative suprieure 1, ce spectre est dplac vers le bas car la
vitesse de londe est alors infrieure la vitesse de la lumire :
v=
avec C la vitesse de la lumire dans le vide, r la permittivit relative du milieu.
Les ondes lectromagntiques possdant des longueurs donde situes entre 1 et 10 mm sont
appeles ondes millimtriques. Le spectre infrarouge correspond des longueurs dondes situes
entre 1 m et 1 mm. Ensuite, nous avons le spectre optique visible, le spectre ultraviolet, et
finalement les rayons X. Divers modes de classification sont utiliss pour dsigner les bandes de
frquence du spectre lectromagntique. Ces classifications sont rsumes dans les tableaux 1 et 2.
La classification en bandes RADAR (Tableau 2) date de la seconde guerre mondiale et demeure
toujours dusage aujourdhui mme sil est recommand dutiliser la nouvelle classification
militaire.
Bande de
frquences
3 3 KHz
Dsignation
Very Low Frequency
(VLF)
30 300 KHz
Low Frequency
(LF)
300 3000 KHz
Medium Frequency
(MF)
3 30 MHz
High Frequency
(HF)
30 300 MHz
Very High Frequency
(VHF)
300 3000 MHz
Ultra High Frequency
(UHF)
3 30 GHz
Super High Frequency
(SHF)
30 300 GHz
Extreme High Frequency
(EHF)
Applications typiques
Navigation, sonar
Balises radio, aide la navigation
Radiodiffusion AM, radio maritime
Tlphone, tlgraphe et fax, Radiodiffusions
internationales ondes courtes, radio amateur,
Tlvision, Radiodiffusion FM, contrle du trafique
arien, aide la navigation
Tlvision, communications satellites, sondes radio,
surveillance radar, aide la navigation
Radar satellite, liaisons micro-ondes,
communications mobiles, communications satellites
Radar, expriences
Tableau 1. Dsignation des bandes de frquence.
Philippe Ferrari
-3-
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Frquence
Dsignation des bandes micro-ondes
Ancienne
Nouvelle
500 1000 MHz
VHF
C
1 2 GHz
L
D
2 3 GHz
S
E
3 4 GHz
S
F
4 6 GHz
C
G
6 8 GHz
C
H
8 10 GHz
X
I
10 12,4 GHz
X
J
12,4 18 GHz
Ku
J
18 20 GHz
K
J
20 26,5 GHz
K
K
26,5 40 GHz
Ka
K
Tableau 2. Dsignation militaire des bandes de frquence micro-ondes.
La Figure 2 donne une reprsentation de la correspondance entre frquence et longueur dans le vide
( r = 1 ).
f
3 MHz
100 m
30 MHz
HF
10 m
300 MHz
VHF
1m
3 GHz
UHF
10 cm
30 GHz
SHF
1 cm
300 GHz
EHF
1 mm
Figure 2. Correspondance frquence longueur donde dans le vide.
Actuellement, avec le dveloppement de la tlphonie mobile autour de 900 MHz et 1800-2000
MHz, la dnomination Radiofrquences redevient utilise. Cette dnomination couvre
approximativement la bande 300 MHz 3 GHz.
Compte tenu de la dimension des composants et circuits intgrs, dans la bande UHF et jusqu
environ 1 GHz, la majorit des circuits de communication sont raliss laide dlments localiss,
rsistance, inductances, capacits, tels quon les connat en lectronique (technologie CMS). Entre 1
et 100 GHz, ces lments localiss sont remplacs, grce des quivalences, par des circuits
raliss laide de lignes de propagation. Ltude de ces circuits spcifiques sera effectue dans le
cours dlectronique du second semestre.
1.3 Applications des ondes lectromagntiques
1.3.1 Historique
Lintrt pour les frquences micro-ondes est apparu pour un grand nombre de raisons. La
plus basique est le besoin toujours croissant de bandes spectrales pour les applications
radiofrquences et toutes les applications pour lesquelles seules les frquences micro-ondes peuvent
tre utilises. La bande de frquence 1 GHz (109 Hz) 1 THz (1012 Hz) contient 1000 fois la bande
de frquence DC 1 GHz, on comprend ainsi pourquoi les frquences micro-ondes sont si
largement utilises dans un contexte de besoin croissant de nouvelles plages de frquence.
Au dpart, durant la seconde guerre mondiale et les annes qui suivirent, lingnierie
micro-onde tait synonyme dingnierie RADAR (Radio Detection And Ranging) du fait du fort
dveloppement de systme micro-ondes impuls par le besoin de radars trs haute rsolution
Philippe Ferrari
-4-
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
capables de dtecter et de localiser les avions et troupes ennemies. Les radars actuels, sous leurs
diverses formes, anti-missiles, anti-feu, mto, guidage de missiles, contrle du trafique des
aroport, , reprsente encore une utilisation majeure des micro-ondes. Cette utilisation est lie la
ncessit davoir des antennes possdant un diagramme de rayonnement le plus fin possible, c'est-dire dont le faisceau est le plus troit possible, comme ce qui peut tre ralis par voie optique
laide de LASERs. La capacit pour une antenne focaliser le rayonnement sur un faisceau troit est
limite par les phnomnes de diffraction, qui sont caractriss par la taille relative de lantenne
(ouverture rayonnante) par rapport la longueur donde. Par exemple, une antenne de type parabole
produit un cne de rayonnement possdant un angle douverture A donn par lexpression simple
suivante :
A=
140
,
D / 0
o D est le diamtre de la parabole, 0 est la longueur donde dans le vide.
Ainsi une antenne de diamtre 90 cm peut produire un faisceau possdant un angle douverture de
4,7 10 GHz. Un faisceau de ce type peut dj donner une information tout fait correcte sur une
cible vise par un radar. Pour atteindre la mme finesse de faisceau 100 MHz, lantenne doit
possder un diamtre 100 fois plus important, savoir 90 m. Il est ainsi clair que lon doit travailler
des frquences suffisamment leves afin de minimiser la taille des antennes. Les frquences
micro-ondes permettent dobtenir des antennes de lordre de quelques mm quelques dizaines de
cm, correspondant la taille des circuits ou systmes utiliss, et pouvant tre embarqus (avions,
bateaux, satellites). Cette simple explication explique galement pourquoi les signaux radio ne
peuvent tre transmis en bande de base (frquences audibles de 50 Hz 15 KHz environ) car cela
ncessitera des antennes de plusieurs centaines de km de long. Nous reviendrons sur ces aspects
importants la fin de ce cours lorsque nous discuterons des antennes.
Plus rcemment, les frquences micro-ondes ont commenc tre largement utilises dans
les systmes de communication. Du fait que les communications micro-ondes seffectuent vue
en espace libre, nous avons alors vu apparatre des antennes places au sommet de tours ou de pics
montagneux. Trs rapidement, les satellites gostationnaires ont t utiliss pour les
communications micro-ondes comme stations relais. Le premier plac en orbite fut Telstar, lanc en
1962 et fournissant la premire transmission tlvision en direct des Etats-Unis vers lEurope.
Depuis, les satellites sont trs largement utiliss pour des objectifs de communication, de
surveillance, ou pour collecter des donnes atmosphriques ou mtorologiques. Pour la tlvision,
la bande C est la plus utilise aux Etats-Unis. La transmission ou canal de monte (terre ! satellite)
utilise la bande 5,9 6,4 GHz, et la rception ou canal de descente utilise la bande 3,7 4,2 GHz.
Pour la rception, des antennes paraboliques de 2,4 m de diamtre sont gnralement utilises, puis
la tlvision est diffuse par cble au sol vers les particuliers. Une seconde bande a galement t
attribue pour la diffusion directe vers le particulier, principalement utilise en Europe et au Japon :
14 14,5 GHz pour la transmission et 10,95 11,2 GHz ou 11,45 11,7 GHz pour la rception.
Dans cette bande, lantenne doit possder un diamtre de 90 cm pour une rception correcte. Ce
sont les antennes visibles sur nombre de toits ou balcons.
1.3.2 Quelques applications typiques
Le dveloppement successif du tlphone, de la radiodiffusion, de la tlvision, des
ordinateurs, ont abouti un volume de donnes changes considrable et dont le transfert entre
diffrents lieux seffectue par lintermdiaire dondes lectromagntiques guides dans des cbles
ou des fibres, ou rayonnes dans lair par lintermdiaire dantennes. Pour tenter de satisfaire tous
les utilisateurs, le spectre hertzien a t divis en diffrentes plages ou bandes de frquences
attribues essentiellement pour les applications militaires, les tlcommunications civiles et la
radionavigation. La rpartition des frquences est effectue par lUnion Internationale des
Philippe Ferrari
-5-
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Tlcommunications (UIT), organisme international dont le sige est Genve et qui dpend de
lONU.
Si llectronicien peut se permettre lutilisation de nimporte quelle frquence lorsquil travaille
avec des circuits blinds, il devient rprhensible lorsquun lment de son circuit rayonne et
savre susceptible de gner lenvironnement (problme de compatibilit lectromagntique
CEM). Le spectre hertzien, comme on la vu, est ainsi divis par plages de largeur variable
attribues des utilisations bien spcifiques, aucune plage jusquaux micro-ondes ntant laisse
libre. LUIT remet priodiquement jour un recueil dutilisation du spectre hertzien dont le volume
est semblable celui dun dictionnaire classique. Le Tableau 1 donne les applications principales
par bandes de frquences. Nous donnons ci-dessous quelques applications et leur bande de
frquence prcise.
87 107 MHz : plage utilise en radiolectricit pour les missions en Modulation de
Frquence (FM).
54 216 MHz : transmission des canaux tlvision dits VHF par voie terrestre.
470 890 MHz : transmission des canaux tlvision dits UHF par voie terrestre.
890 960 MHz : Technologie GSM pour la tlphonie mobile.
1710 1880 MHz : Technologie DCS 1800 pour la tlphonie mobile.
2450 2500 MHz : fours micro-ondes et applications civiles (radar, ).
60 GHz : rseaux de transmission courte porte intra-muros.
77 GHz : radars anticollision automobile.
La Figure 3 donne le principe et les frquences de fonctionnement des technologies GSM et DCS
1800, qui constituent les standards Europens en tlphonie mobile.
Tx
GSM
Downlink (Rx)
890
f(MHz)
Rx
915
935
960
Uplink (Tx)
MS=mobile station
BS=base station
1-2Watts
300 Watts
Tx
DCS 1800
1710
Rx
1785
1805
f(MHz)
1880
Figure 3. Principe et frquences de fonctionnement des technologies GSM et DCS 1800.
La Figure 4 donne une ide de la trs forte croissance du march de la tlphonie mobile, passant de
moins de 100 millions dabonns en 1997 plus de un milliard en 2004. La taille de ce march
implique la formation de techniciens et ingnieurs comptents dans le domaine des micro-ondes.
Philippe Ferrari
-6-
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Subscribers (Millions)
1250
1000
750
400
500
250
1997
2000
2003
Figure 4. Evolution du march de la tlphonie mobile en nombre dutilisateurs de tlphones
portables (nombre dabonns).
Si lon considre llectronicien comme le spcialiste des circuits mettant en jeu des circuits
transistors, on peut considrer que celui-ci peut sattendre au cours de sa carrire tre confront au
spectre sur lequel les transistors fonctionnent. Or actuellement les transistors les plus performants
possdent des frquences de transition suprieures 500 GHz. Il est donc ncessaire de sintresser
au domaine des micro-ondes, et donc dtudier la propagation des ondes lectromagntiques le long
de lignes, puis ensuite les composants et circuits micro-ondes. Le formalisme mathmatique
complet pour ltude de la propagation des ondes est complexe et fait appel aux quations de
Maxwell. En pratique, on se rfre cependant rarement aux quations de Maxwell pour traiter les
problmes de propagation. On utilise une approche circuit en utilisant des quivalences entre le
courant et la tension, et les champs magntique et lectrique. Dans ce cours, nous dveloppons cette
approche circuit . Le cours dlectronique du second semestre sera destin ltude des
phnomnes de propagation laide des quations de Maxwell.
1.4 Circuits micro-ondes et mthodes danalyse
Comme on la soulign, les phnomnes de propagation mis en vidence au paragraphe 1.1
imposent le recours des circuits et mthodes danalyse spcifiques ds lors que la longueur donde
correspondant la frquence ne pleut plus tre considre comme trs leve vis--vis des
dimensions du circuit (rapport 10 20 minimum). Lune des exigences essentielle pour un circuit
micro-onde est alors de pouvoir transmettre correctement (sans distorsion et pertes) un signal dun
point un autre. Cela ncessite le transport de lnergie sous la forme dune onde lectromagntique
se propageant. Lutilisation de deux fils parallles est impossible pour des frquences suprieures
quelques dizaines de MHz. Les paires torsades peuvent tre utilises jusqu environ la centaine de
MHz sur des distances de quelques mtres. Ensuite les utilisateurs ont recours des supports de
transmission spcifiques, appeles lignes de propagation ou lignes de transmission . La Figure
5 dcrit quelques topologies classiques de lignes de transmission. Le cble coaxial est utiliss pour
relier des systmes entre eux et peut supporter des puissances leves de plusieurs centaines de
Philippe Ferrari
-7-
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Watts. Il est limit des frquences de 110 GHz actuellement du fait des dimensions qui deviennent
alors microniques et ncessitent des prcisions dusinage extrmes. La ligne micro-ruban est utilise
lintrieure des systmes. Sa structure planaire permet le montage de transistors ou de puces en
surface. Le guide donde coplanaire est galement une structure planaire, il possde lavantage par
rapport la ligne micro-ruban dtre moins dispersif (la permittivit effective reste constante sur
une plus large bande de frquence), mais demeure plus gourmand en dimensions transversales.
Cble coaxial
Ligne micro-ruban
Guide donde coplanaire
Figure 5. Quelques lignes de propagation classiques.
Pour des frquences suprieures la centaine de GHz, pour lesquelles on trouve essentiellement des
applications radar ou spatiales, on utilise principalement les guides donde, rectangulaires ou
cylindriques, du fait de leurs meilleures proprits lectriques ou mcaniques.
Guide cylindrique
Guide rectangulaire
Figure 6. Guides donde.
0
100
Espace libre
200
Attnuation
dB / km
Fibre optique
0,5 dB/km
300
Cble
400
coaxial
60 dB/km
500
Guide
circulaire
2 dB/km
600
0
10
1000
100
Distance en km
10000
Figure 7. Attnuation typique pour les quatre supports de transmission les plus utiliss pour relier
des systmes entre eux (> quelques 10 cm).
Philippe Ferrari
-8-
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
2 La ligne de propagation Analyse par la thorie des circuits
Les phnomnes de propagation sur les lignes plusieurs conducteurs studient laide des
quations de Kirchoff : loi des mailles et loi des nuds. La dmarche est la suivante :
1. Construction dun modle de la ligne de propagation.
2. Etablissement des quations diffrentielles couples rgissant la propagation dune onde
de tension ou de courant sur la ligne.
3. Rsolution de des quations diffrentielles couples en rgime harmonique : ondes
progressives et rgressives, vitesse de phase, longueur donde.
4. Caractristiques des ondes : mise en vidence des concepts dimpdance caractristique,
dexposant de propagation, et de coefficient de rflexion.
5. Introduction doutils danalyse : abaque de Smith, paramtres S.
6. Analyse temporelle des phnomnes de propagation : rsolution des quations diffrentielles
dans le domaine temporel.
Ltape 6. est de loin la plus complique. Lanalyse temporelle ncessite la rsolution directe de
lquation diffrentielle, et donc des outils mathmatiques danalyse, alors que lanalyse
harmonique, qui fait appel la notation complexe, se rsume ltude de problmes algbriques.
On peut comparer avec le domaine de lautomatique (systmes asservis). Il est largement plus ais
de driver la fonction de transfert dun systme, qui correspond au rgime harmonique, plutt que sa
rponse indicielle (analyse temporelle ou dynamique ).
2.1 Modle circuit dune ligne de propagation
Pour commencer, on considre une ligne bifilaire comme dcrit sur la Figure 8. En
lectronique, ces lignes sont utilises classiquement pour relier des systmes entre eux, leur
longueur, en fonction des applications, peut varier de quelques mm quelques mtres.
Figure 8. Ligne bifilaire.
Nous allons tudier le comportement de cette ligne lorsque la frquence augmente, en partant des
basses frquences.
En basse frquence, c'est--dire en dessous de quelques MHz, la ligne peut tre modlise par une
simple rsistance.
Lorsque lon augmente la frquence, on voit apparatre un phnomne de filtrage passe-bas. Ce
phnomne a lieu entre quelques dizaines de MHz et quelques centaines de MHz, dpendant comme
on le verra par la suite de la longueur de la ligne. On constate videmment ce phnomne sur les
lignes tlphoniques, ce qui pose des problmes pour transmettre des informations haut dbit. Ce
phnomne peut tre modlis par une capacit en parallle sur la ligne. Cette capacit traduit
physiquement le fait que lon dispose de deux conducteurs en vis vis.
Enfin si lon augmente encore la frquence, on se retrouve dans le cas de lexprience de la Figure
1 : la tension mesure au bout de la ligne nest pas du tout gale la tension applique en entre. Il
se produit un phnomne de propagation. Ce phnomne est du au comportement inductif de la
Philippe Ferrari
-9-
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
ligne, on doit ainsi faire apparatre une inductance dans notre modle. Cette inductance traduit
physiquement le phnomne dauto-inductance abord dans le cours de magntostatique de
premire anne.
Enfin, si le dilectrique sparant les deux conducteurs nest pas parfait, un courant de fuite
pourra circuler entre ceux-ci. Ce courant engendrera des pertes, il est donc ncessaire dajouter au
modle une rsistance parallle. Du fait que cette rsistance soit en parallle, on utilise plutt le
terme de conductance.
Nous avons ainsi un modle comportant quatre paramtres :
R : rsistance srie en Ohms ().
L : inductance srie en Henrys (H).
C : capacit parallle en Farads (F).
G : conductance parallle en Siemens (S).
A ce stade, ayant compris la cause de la prsence de chacun de ces quatre lments, on pourrait
penser modliser simplement la ligne par un arrangement de ces lments. On aurait alors un
modle localis ou discret . Quel que soit larrangement, on naurait alors pas la possibilit
de faire apparatre des effets de propagation et la structure serait un simple filtre localis de type
passe-bas du second ordre.
Afin de tenir compte de leffet prpondrant de propagation, la technique consiste tablir un
modle dune section de longueur infinitsimale de ligne, puis ensuite dintgrer les quations
diffrentielles dcrivant le modle ainsi constitu.
Pour la suite, on considre donc un lment de ligne de longueur infinitsimale dx (Figure 9). Dun
point de vue vocabulaire, nous utiliserons le terme section lmentaire pour dcrire une section
de longueur infinitsimale. Les quatre lments R, L, C et G sont dfinis de manire linique et ont
pour dimension :
R : rsistance linique srie en Ohms (/m).
L : inductance linique srie en Henrys (H/m).
C : capacit linique parallle en Farads (F/m).
G : conductance linique parallle en Siemens (S/m).
Ces quatre lments R, L, C et G ainsi dfinis sont appels paramtres primaires de la ligne de
propagation.
Ldx
Rdx
i(x)
i(x+dx)
v(x)
v(x+dx)
Cdx
Gdx
dx
Figure 9. Section lmentaire de ligne de propagation.
2.2 Equations diffrentielles couples
Lcriture des quations de Kirchoff donne, en considrant que les variations en fonction du temps
de v( x ) et de v( x + dx ) sont les mmes du fait que dx est une longueur infinitsimale :
Philippe Ferrari
- 10 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
v( x + dx, t ) v( x, t ) = Rdx.i ( x, t ) Ldx.
i ( x, t )
t
(1)
i ( x + dx, t ) i ( x, t ) = Gdx.v( x, t ) Cdx.
v( x, t )
t
(2)
Du fait que dx est une longueur infinitsimale, on peut crire :
v(x + dx, t ) v( x, t ) v( x, t )
i ( x + dx, t ) i (x, t ) i ( x, t )
=
et
=
dx
x
dx
x
(3)
Do les deux quations diffrentielles :
v( x, t )
i ( x, t )
= R.i (x, t ) L
x
t
(4)
i ( x, t )
v( x, t )
= G.v( x, t ) C
x
t
(5)
2.3 Rgime harmonique
2.3.1 Equations de propagation
Dans cette partie, nous rsolvons les quations (4) et (5) en rgime harmonique, donc en
considrant comme excitation une onde sinusodale de frquence f. Nous utilisons donc le
formalisme mathmatique des notations complexes qui simplifient grandement la rsolution.
Les grandeurs complexes associes v( x, t ) et i ( x, t ) scrivent donc :
v( x, , t ) = V ( x, ).e jt ,
(6)
i ( x, , t ) = I ( x, ).e jt ,
(7)
avec : = 2f .
V ( x, ) et I ( x, ) sont les amplitudes complexes associes la tension v( x, t ) et au courant i ( x, t ) ,
respectivement. Ces amplitudes complexes ne dpendent videmment pas du temps du fait que lon
effectue une analyse harmonique. Rappelons que lon revient aux grandeurs relles, dpendant du
temps, en prenons mathmatiquement la partie relle des grandeurs complexes associes :
v( x, t ) = Re v( x, , t ) = Re V ( x, ).e jt = V .Cos (t ) .
(8)
En remplaant v( x, t ) et i ( x, t ) par leur grandeur complexe associe dans les quations (4) et (5), on
obtient :
V ( x, )
= R.I ( x, ) jL I ( x, ) = (R + jL )I ( x, ) ,
x
(9)
I ( x, )
= G.V ( x, ) jCV ( x, ) = (G + jC )V ( x, ) .
x
(10)
Le facteur e jt slimine. On est alors ramen la rsolution dquations diffrentielles couples
coefficients constants. Eliminons V ( x, ) entre les deux quations ; pour cela, drivons lquation
(10) par rapport x :
Philippe Ferrari
- 11 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
V ( x, )
2 I ( x, )
.
= (G + jC )
2
x
x
Remplaons le terme
(11)
V ( x, )
par son expression (quation (9)) :
x
2 I ( x, )
= (G + jC )(R + jL )I ( x, ) .
x 2
(12)
2 I ( x, )
2 I ( x, ) = 0 .
2
x
(13)
Soit encore :
jC )(R + jL ) = + j a la dimension de m-1. Nous verrons plus loin la
signification physique de .
De la mme manire, on obtient :
o =
(G +
2 V (x, )
2 V ( x, ) = 0 .
2
x
(14)
Intgrons lquation (13). Lquation caractristique scrit : r 2 = 2 , soit deux solutions :
r1
r2
= .
(15)
La solution gnrale est donc :
I ( x, ) = A( )e x + B( )ex ,
(16)
o A( ) et B ( ) sont des amplitudes complexes sexprimant en Ampres et dpendant uniquement
de la pulsation .
De la mme manire, on pourrait intgrer lquation (14), ce qui introduirait deux nouvelles
constantes dintgration : C ( ) et D ( ) , qui ne peuvent pas tre indpendantes de A( ) et B ( ) .
Il vaut donc mieux reporter (16) dans (13). On obtient :
V ( x, ) =
(R + jL ) (A( )e x B( )ex )
.
(G + jC )
(17)
(R + jL )
(G + jC ) ,
(18)
En posant :
Z c ( ) =
nous obtenons en dfinitive le jeu dquations suivantes :
I ( x, ) = A( )e x + B( )ex .
(19)
V ( x, ) = Z c ( ) A( )e x B( )ex .
(20)
Ces relations reprsentent la solution gnrale relle suivante :
i ( x, t ) = Ae x Cos (t x ) + Bex Cos(t + x ) ,
Philippe Ferrari
- 12 -
(21)
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
v( x, t ) = Z c (Ae x Cos(t x ) Bex Cos (t + x )) ,
(22)
o, dans le cas gnral, A, B et Zc reprsentent le module de A , B et Z c , respectivement.
Nous voyons apparatre deux fonctions :
x
x
f t
et f t +
.
(23)
Nous allons montrer que ces fonctions caractrisent deux phnomnes de propagation dans deux
directions opposes.
x
2.3.2 Etude gnrale des fonctions f t
v
Le terme
et f t + x
a la dimension de linverse dune vitesse en m/s, nous le nommerons :
v =
(24)
x
Considrons la fonction f t
v
x
En x1 et au temps t1, la phase scrit : t1 1 .
x
En x1 et au temps t2 > t1 la phase scrit : t 2 1 .
Cherchons, au temps t2, en quel point x2 > x1 la phase est la mme quen x1 au temps t1.
x
x
Nous crivons : t1 1 = t 2 2 , soit : x2 x1 = v (t 2 t1 ) = v t .
v
v
La phase sest donc dplace selon les x croissants la vitesse v (Figure 10). La phase sest
propage avec la vitesse v qui est ainsi dfinie comme la vitesse de phase :
v =
1 (t1 )
x1
v t
(25)
2 (t 2 )
x2
Figure 10. Illustration de la notion de vitesse de phase.
x
Ainsi, toute fonction mathmatique f t reprsente une onde qui se propage selon les x
v
croissants avec la vitesse v . On appelle ces ondes des ondes progressives.
Philippe Ferrari
- 13 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
x
De la mme manire, on montrerait que toute fonction mathmatique f t + reprsente
v
une onde qui se propage selon les x dcroissants avec la vitesse v . On appelle ces ondes des
ondes rgressives.
Par la suite, chaque fois que lon parlera dondes progressives, on utilisera lindice + .
Lindice - sera utilis pour les ondes rgressives.
2.3.2.a Longueur donde
x
Reprsentons, un instant donn t, lexpression : Cos t
v
i ou v
(Figure 11).
x
x2
x1
(2 )
(1 )
Figure 11. Illustration de la notion de longueur donde.
La longueur donde est, par dfinition, la distance qui spare, un instant donn, deux points
dabscisse x1 et x2 o la phase est la mme, 2 prs :
x
x1
= t 2 + 2 ,
v
v
(26)
x x
2v
ce qui donne : 2 1 = 2 , do : = x2 x1 =
,
v
en dfinitive, nous retiendrons :
(27)
comme dfinition de la longueur donde .
2.3.2.b Formulation en ondes progressives et rgressives
Nous avons tabli au paragraphe 2.3.1 les quations ci-dessous :
I ( x, ) = A( )e x + B( )ex .
(28)
V ( x, ) = Z c A( )e x B( )ex .
Philippe Ferrari
- 14 -
(29)
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Ces deux quations dpendent de deux coefficients complexes A( ) et B ( ) . Nous pouvons
rcrire ces quations en remarquant que le coefficient A( ) correspond aux ondes progressives et
que B ( ) correspond aux ondes rgressives.
En posant :
I 0+ ( ) = A( ) et I 0 ( ) = B( ) ,
(30)
V0+ ( ) = Z c A( ) et V0 ( ) = Z c B( ) ,
(31)
on obtient alors le jeu dquations suivantes :
I ( x, ) = I + ( x, ) + I ( x, ) = I 0+ ( )e x + I 0 ( )ex ,
(32)
V ( x, ) == V+ ( x, ) + V (x, ) = V0+ ( )e x + V0 ( )ex ,
(33)
o I 0+ ( ) , I 0 ( ) , V0+ ( ) et V0 ( ) reprsentent les amplitudes complexes des courants et
tensions en x = 0 . On aurait pu crire I + (0, ) , I (0, ) , V+ (0, ) et V (0, )
Ce sont les quations (32) et (33) que nous utiliserons pour toute la suite du cours. Les relations
liant I 0+ ( ) , I 0 ( ) , V0+ ( ) et V0 ( ) se dduisent des quations (30) et (31) :
V0+ ( )
V ( )
= Z c ( ) et 0
= Z c ( ) .
I 0 ( )
I 0+ ( )
(34)
Pour la suite, afin dallger les notations, nous omettrons les parenthses ( ) et ( x, ) dans les
quations manipules.
2.3.3 Caractristiques des ondes : impdance caractristique, exposant de
propagation, coefficient de rflexion
2.3.3.a Impdance caractristique
On crit le rapport tension sur courant en tout point de la ligne :
V V0+ e x + V0 ex
=
= Z (x ) .
I
I 0+ e x + I 0 ex
(35)
Z ( x ) a la dimension dune impdance. Si lon coupe la ligne labscisse arbitraire x = x1 et que
lon remplace la partie correspondant x > x1 par une impdance de valeur Z ( x1 ) , rien nest chang
pour la section prcdent la coupure.
Situation pour une onde progressive seule
Si seule une onde progressive existe (termes en e x ), nous obtenons :
Z (x ) =
V+ V0+ e x V0+
=
=
= Zc .
I + I 0+ e x I 0+
(36)
Z c ne dpend pas de x mais de la pulsation . Ceci montre que les ondes de courant et
tension progressives sont en tout point de la ligne dans un rapport Z c .
Philippe Ferrari
- 15 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Situation pour une onde rgressive seule
Si seule une onde rgressive existe (termes en e + x ), nous obtenons :
Z (x ) =
V V0 e + x V0
=
=
= Z c .
I I 0 e +x I 0
(37)
Le rapport onde de tension/onde de courant a le mme module que pour les ondes
progressives, mais sa phase est oppose.
Ces deux situations correspondent concrtement au cas dune ligne semi infinie (termine
seulement une extrmit). Dans ce cas en effet il ne peut y avoir quune seule onde (progressive
ou rgressive) sous peine de voir tension et courant tendre vers linfini, ce qui est physiquement
inacceptable.
On en conclut que limpdance Z c correspond la valeur de limpdance quil faut connecter au
bout dune ligne afin quelle se comporte comme une ligne semi infinie, c'est--dire pour que seule
une onde (progressive ou rgressive) se propage. On nomme cette impdance limpdance
caractristique de la ligne. Une ligne termine par son impdance caractristique Z c est dite
adapte.
Nous avons tabli lexpression de Z c en fonction des paramtres liniques de la ligne de
propagation R, L, C et G :
Z c ( ) =
(R + jL ) .
(G + jC )
(38)
Dans le cas gnral, limpdance caractristique dune ligne est donc complexe. En pratique
cependant, la qualit des conducteurs utiliss (Cuivre, Or ou Argent) ainsi que des substrats
dilectriques nous situent le plus souvent, dans le domaine de la RF, dans un contexte faibles
pertes qui implique :
R << jL et G << jC .
(39)
On a alors grer une impdance caractristique relle, qui scrit :
Zc =
L
.
C
(40)
Ladaptation de la ligne sen trouve videmment grandement simplifie.
2.3.3.b Exposant de propagation
:
Les quations de propagation (32) et (33) que nous avons tablies font apparatre le facteur
(G +
jC )(R + jL ) = + j .
(41)
On nomme ce facteur exposant de propagation . Il se dcompose en fonction de et , que lon
nomme respectivement exposant dattnuation et exposant de phase .
fournit lattnuation linique de la ligne e x en fonction de la distance x. sexprime en
nepers/m (np/m).
On calcule souvent lattnuation dune onde en dB/m : dB = 20.Log e = 8,68. (np / m ) .
( )
Philippe Ferrari
- 16 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
est reli la vitesse de phase par la relation (27) que nous rappelons :
(42)
On peut galement crire en fonction du temps caractristique de la ligne Tc :
= Tc ,
(43)
o Tc sexprime en s/m et traduit le temps mis par londe pour parcourir une distance x. Cest
linverse de la vitesse de phase.
Dans lhypothse faibles pertes traduite par les relations (39), on obtient pour les expressions de
et de :
= LC .
=
1 R 1
+ GZ c .
2 Zc 2
(44)
(45)
1 R
1
et GZ c reprsentent les pertes conductrices dues la rsistance srie R et les
2 Zc
2
pertes dilectriques dues la conductance G, respectivement. Dans la pratique, la qualit des
dilectriques utiliss conduit souvent ngliger les pertes dilectriques qui savrent largement
infrieures aux pertes conductrices.
Les termes
2.3.4 Coefficients de rflexion et de transmission Rapport dOndes Stationnaire
(ROS)
La propagation des ondes dans une ligne de propagation est rgie par les caractristiques de
la ligne, qui imposent en particulier la vitesse et lattnuation des ondes, mais galement par les
conditions aux extrmits, c'est--dire les composants ou circuits connects aux deux extrmits de
la ligne. On nomme ces conditions conditions aux limites .
2.3.4.a Coefficient de rflexion
On dfinit un coefficient de rflexion par le rapport dune onde se propageant dans un
sens sur londe se propageant en sens inverse, aprs rflexion sur un obstacle ou une discontinuit.
Cette dfinition impose que lon dtermine le sens partir duquel le coefficient de rflexion est
considr. Cela peut concerner les ondes de tension ou de courant, mais en pratique on considre
essentiellement les ondes de tension.
Pour une onde progressive de tension, on dfinit dans le cas gnral le coefficient de rflexion
+ en un point x de la ligne par :
+ ( x ) =
V0 ex V0 2x
=
e .
V0+ e x V0+
(46)
+ peut sexprimer en fonction de la terminaison au point x = l puisque cest cette terminaison qui
conditionne le phnomne de rflexion. En x = l , on considre la ligne charge par une impdance
V (l )
.
I (l )
On peut exprimer Z l en utilisant les quations de propagation (32) et (33), soit :
Z l , soit : Z l =
Philippe Ferrari
- 17 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
V0 + ( )e l + V0 ( )el
,
Zl = Z c
V0 + ( )e l V0 ( )el
(47)
soit :
Zl = Zc
1 + + (l )
,
1 + (l )
(48)
+ (l ) =
Zl Zc
.
Zl + Zc
(49)
soit encore :
Pour une onde rgressive en tension, on obtient de la mme faon :
(l ) =
Z0 Zc
,
Z0 + Zc
(50)
o Z 0 est limpdance en x = 0 .
On en dduit la dfinition gnrale et unique du coefficient de rflexion en tension :
Z ch arg e Z c
,
Z ch arg e + Z c
(51)
o Z ch arg e reprsente limpdance de charge de la ligne de propagation, quel que soit le sens de
propagation considr. On peut dire que le coefficient de rflexion lextrmit dune ligne de
propagation sexprime comme la diffrence entre limpdance de charge vue et limpdance
caractristique de la ligne, divise par la somme .
On pourrait montrer que le coefficient de rflexion en courant est gal loppos du coefficient de
rflexion en tension.
2.3.4.b Coefficient de transmission
Le coefficient de transmission est par dfinition le rapport entre londe de tension transmise
une charge, ou une liaison entre deux lignes, et londe de tension incidente (se propageant vers la
charge).
Pour une onde progressive de tension, on a donc :
V (x ) V0+ e x + V0 e + x
T+ ( x ) =
=
= 1 + + ( x ) .
V0+ e x
V0+ e x
(52)
Pour une onde rgressive de tension, on a :
T ( x ) =
V ( x ) V0+ e x + V0 e + x
=
= 1 + ( x ) .
V0 e +x
V0 e +x
(53)
On en dduit la dfinition gnrale et unique du coefficient de transmission en tension :
T = 1+ .
(54)
On note que la tension transmise est gale la tension incidente plus la tension rflchie, et non
moins, ce qui peut paratre contraire lintuition.
Philippe Ferrari
- 18 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
On peut vrifier que ce rsultat nest pas contradictoire avec la ralit physique qui implique que la
puissance transmise doit tre gale la puissance incidente moins la puissance rflchie.
Le coefficient de transmission en courant scrivant Ti = 1 , on obtient bien un coefficient de
)(
transmission en puissance : T p = Tv Ti* = 1 + 1 * = 1 infrieur lunit.
2.3.4.c Rapport donde stationnaire
On utilise labrviation ROS, ou en Anglais le terme Voltage Standing Wave Ratio ,
soit VSWR.
2.3.4.c.1 Expression du ROS
On sintresse lamplitude des ondes de tension et de courant le long de la ligne lorsquelle
est termine par une charge quelconque relle Z l . On se place dans lhypothse dune ligne de
propagation sans pertes. Cette hypothse ne modifie en rien la conclusion de ltude mais permet de
la simplifier. Le rsultat obtenu pourra tre gnralis au cas des lignes pertes. En labsence de
2
. Dautre part, limpdance caractristique de la ligne tant relle, le
pertes, on a : = j = j
coefficient de rflexion au niveau de la charge Z l sera lui-mme rel.
Nous avons montr prcdemment que la tension V ( x, ) en un point x de la ligne sexprimait par
la relation :
V ( x, ) = V0+ ( )e jx + V0 ( )e jx = V0+ ( )e jx 1 + e 2 jx = V+ ( ) 1 + e 2 jx ,
(55)
tant le coefficient de rflexion en x = 0 .
Soit le rapport entre londe de tension totale et londe progressive :
V ( x, )
= 1 + e 2 jx .
V+ ( )
(56)
La Figure 12 reprsente sur un diagramme de Fresnel (ou plan complexe) lexpression
lorsque x varie.
V ( x, )
V+ ( )
V ( x, )
V+ ( )
Figure 12. Illustration de la notion de Rapport dOnde Stationnaire (ROS) : diagramme de Fresnel.
Lamplitude ou module normalis de londe de tension totale en tout point x de la ligne sur londe
de tension progressive scrit alors :
v(x ) =
V ( x, )
V+ ( )
V ( x, )
= 1 + e 2 jx .
V0+ ( )
La relation (57) impose :
Philippe Ferrari
- 19 -
(57)
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
1 < v <1+ .
(58)
Ainsi cette amplitude normalise passe par des maxima et minima :
+ 2k
vmin = 1 si 2 x = + 2k ! x =
= +k .
2
4
2
vmax = 1 + si 2 x = 2k ! x =
2k
=k .
2
2
A une distance x, on a : v( x ) = 1 + e 2 jx =
. Ils sont espacs entre eux de
. La Figure 13
4
2
reprsente lamplitude normalise de londe de tension le long de la ligne, en fonction de x.
Les minima et maxima se retrouvent tous les
[1 + Cos(2x )]2 + [Sin(2x )]2 .
v( x )
1+
1
/4
1
/2
Figure 13. Illustration de la notion de Rapport dOnde Stationnaire (ROS) : amplitude de londe de
tension. Trac effectu pour = 0,5 .
Le ROS ou VSWR se dfinit comme suit :
= VSWR =
vmax Vmax 1 +
=
=
.
vmin Vmin 1
(59)
En inversant lquation (59), on obtient galement :
=
1
.
+1
(60)
Dans le cas o la ligne est termine par un court-circuit ou ouverte :
=1 ! = .
(61)
Si la ligne est charge par une impdance de mme valeur que son impdance caractristique :
= 0 ! = 1.
En pratique, on exprime et en dB : dB = 20 Log et dB = 20 Log ( ) .
2.3.4.c.2 Mesure du ROS
Philippe Ferrari
- 20 -
(62)
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Avant le dveloppement des analyseurs de rseau durant les annes 70, la mesure du ROS
constituait lune des mesures les plus importantes en hyperfrquences. Aujourdhui, avec
lavnement simultan des analyseurs de rseau et de techniques de calibrage pouvant sadapter aux
technologies actuelles, planaires ou autres, la mesure du ROS est incluse dans un ensemble de
mesures plus complet. Un TP est encore consacr la mesure du ROS, dans un but exclusivement
pdagogique.
2.4 Adaptation dimpdance
La question de ladaptation dimpdance se pose chaque fois que lon souhaite connecter
deux systmes ou circuits entre eux et transfrer un maximum de puissance. En lectronique
classique , nous avons vu en premire anne que pour adapter un gnrateur dimpdance interne
complexe Z g , il fallait lui prsenter une charge complexe conjugue : Z ch arg e = Z g* . Ce rsultat est
gnral et reste valable dans un contexte de propagation dondes. Cependant les mthodes
dadaptation sont trs diffrentes.
Pour introduire quelques solutions possibles trs utilises, nous considrons un gnrateur attaquant
la base dun transistor bipolaire que lon souhaite faire fonctionner en amplificateur. Nous
supposons un gnrateur dimpdance interne de Thvenin Z 0 relle, et une charge complexe :
Z ch arg e = Z chre arg e + jZ chimarg e
(63)
reprsentant limpdance dentre du transistor.
On peut galement dcrire le transistor laide de son admittance dentre :
1
Ych arg e =
= Ychrearg e + jYchimarg e .
Z ch arg e
(64)
Nous dcrivons ci-dessous une solution afin dadapter les parties relle et imaginaire, en utilisant la
technique du transformateur dimpdance donde dune part, et des stubs en circuit ouvert ou
court-circuit dautre part. Nous considrons des lignes de propagation sans pertes.
2.4.1 Adaptation partie relle : transformateur donde
La mthode pour mettre en uvre la technique dadaptation par transformateur donde est
la suivante :
Calculer limpdance dune charge relle vue travers une ligne de propagation de
longueur l. Cette impdance correspond limpdance dentre du circuit ainsi constitu
dune ligne charge.
Montrer que pour l =
, la ligne est quivalente un transformateur dimpdance.
2.4.2 Adaptation partie imaginaire : stub
Nous allons montrer que limpdance ramene travers une ligne de propagation par un
circuit ouvert (CO) ou un court-circuit (CC) est purement imaginaire et peut tre compltement
ajuste. Nous considrons donc le circuit de la Figure 14.
x
CO ou CC
Plan dentre
Figure 14. Illustration du principe du stub.
Philippe Ferrari
- 21 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
La mthode consiste tablir lexpression de limpdance dentre du circuit (vue du plan dentre),
puis montrer que cette impdance est purement imaginaire. On peut galement montrer que
limpdance ramene reprsente alternativement un condensateur puis une self, puis un
condensateur, , et dire pour quelle application fondamentale en lectronique ce genre de circuits
seront intressants.
2.5 Outils danalyse : abaque de Smith paramtres S graphes de
fluence
2.5.1 Abaque de Smith
2.5.1.a Intrt
Labaque de Smith constitue un outil encore largement utilis dans le domaine des
hyperfrquences, malgr lavnement doutils CAO de plus en plus performants et accessibles. Il
permet deffectuer graphiquement le passage (dans les deux sens) entre le coefficient de
rflexion lextrmit dune ligne et limpdance de charge. Ces deux paramtres tant
complexes, ils peuvent tre reprsents dans un plan complexe. Labaque de Smith consiste
superposer deux plans complexes : un plan cartsien reprsentant le coefficient de rflexion et un
faisceau de courbes reprsentant limpdance de charge.
2.5.1.b Construction
Afin davoir un abaque indpendant de la valeur de limpdance caractristique de la ligne,
labaque doit tre normalis par rapport celle-ci. En gnral labaque est normalis par rapport
50 qui constitue le standard dimpdance en hyperfrquences.
La relation liant le coefficient de rflexion limpdance caractristique et limpdance de charge
dune ligne a t tablie au paragraphe 2.3.4.a :
Z ch arg e Z c
Z ch arg e + Z c
(65)
Dans la pratique, limpdance caractristique Z c dune ligne de propagation peut, en premire
approximation, tre considre comme relle. Cest dans cette hypothse quest trac labaque de
Smith, soit :
Z ch arg e Z c
Z ch arg e + Z c
(66)
Si lon normalise les impdances par rapport Z c , on obtient :
(Z
(Z
ch arg e
ch arg e
)
+ Z )/ Z
Zc / Zc
c
zch arg e 1
zch arg e + 1
(67)
Cest partir de la relation (67) que lon fabrique labaque de Smith.
Sur un plan complexe, on reprsente le coefficient de rflexion = re + jim . Il sagit ensuite de
reprsenter sur ce plan le lieu de limpdance de charge complexe zch arg e . Pour cela, on crit zch arg e
en fonction de :
zch arg e =
Philippe Ferrari
1+
im
= zchre arg e + jzch
arg e ,
1
- 22 -
(68)
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
im
o zchre arg e et zch
arg e reprsentent les parties relle et imaginaire de zch arg e .
Des calculs simples montrent que :
( re =
1
centr en
1 + zchre arg e
le lieu de zchre arg e constante est reprsent par un cercle de rayon R =
zchre arg e
; im = 0 ).
1 + zchre arg e
im
Le lieu de zch
arg e constante est reprsent par un cercle de rayon R =
im
ch arg e
centr en
( re = 1 ; im =
).
z
La Figure 15 montre la reprsentation des cercles reprsentant les parties relle et imaginaire de
zch arg e dans un plan complexe de coordonnes re et im .
im
ch arg e
im
-0,5
im
=1
0,5
zchimarg e = 2
zchre arg e = 1
0,5j
-1
zchre arg e = 7
im
ch arg e
0,5j
re
-1
-0,5
0,5
re
zchre arg e =
-0,5j
-0,5j
zchre arg e = 0
Axe des Impdances
relles
-j
-j
zchimarg e = 1
Cercle des impdances
imaginaires pures
zchre arg e
zchimarg e
zchimarg e = 2
Lieu des centres
des cercles zim
Figure 15. Construction de labaque de Smith.
Le lieu des impdances relles est laxe im = 0 .
Le lieu des impdances imaginaires est le cercle extrieur de labaque.
La moiti infrieure de labaque reprsente des charges capacitives, la moiti suprieure reprsente
des charges inductives. En effet :
zch arg e 1
z ch arg e + 1
Donc : im = 2
im
zchre arg e + jz ch
arg e 1
im
zchre arg e + jzch
arg e + 1
(z
im
zch
arg e
re
ch arg e
) (
2
+1 + z
(z ) + (z ) 1
(z + 1) + (z )
2
re
ch arg e
re
ch arg e
2
im
ch arg e
2
im
ch arg e
(z
im
zch
arg e
re
ch arg e
) (
- 23 -
+1 + z
im
, soit im > 0 si zch
arg e > 0 , et vice-versa.
La Figure 16 reprsente un abaque de Smith classique.
Philippe Ferrari
2
im
ch arg e
+2j
2
im
ch arg e
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Figure 16. Abaque de Smith.
Philippe Ferrari
- 24 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
2.5.1.c Utilisation
Labaque de Smith sert a priori passer de coefficient de rflexion impdance de charge (et
vice-versa). Son cadre dutilisation est cependant bien plus large. Il est utilis pour de nombreuses
oprations qui mettent en jeu des dcalages de longueur car, pour une ligne sans pertes, dans le
plan des coefficients de rflexion, un dcalage de longueur x se traduit par un simple dphasage :
= 2 x =
x ,
(69)
correspondant un aller-retour de londe, comme lindique la relation tablie au paragraphe 2.3.4.a:
+ ( x ) =
V0 2x V0 2 jx V0 4 j x
e =
e
=
e
.
V0 +
V0 +
V0 +
(70)
La Figure 17 illustre ce dcalage.
Z ch arg e
Plan dentre
Figure 17. Illustration dun dcalage de longueur.
Lquation (70) montre quun tour complet de labaque correspond x =
( = 2 ).
Si lon souhaite connatre limpdance de charge vue au niveau du plan dentre reprsent sur
la Figure 17, il suffit de placer zch arg e sur labaque de Smith, puis deffectuer une rotation
correspondant , comme le montre la Figure 18.
La question est de savoir dans quel sens tourner sur labaque. Nous pouvons montrer, en nous
appuyant sur la mise en quation des stubs au paragraphe 2.4.2, que lon doit tourner dans le sens
trigonomtrique lorsque lon dcale le plan dentre vers la charge, et dans le sens inverse lorsque
lon sloigne de la charge, en allant donc vers le gnrateur.
Philippe Ferrari
- 25 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Z ch arg e
Figure 18. Illustration dun dcalage de longueur sur labaque de Smith.
Philippe Ferrari
- 26 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
2.5.1.c.1 Exemple 1
Nous considrons une ligne de propagation dimpdance caractristique Z c = 200 , de
longueur lectrique ou phase l = 130 termine par une impdance Z T = R jX = 400 j 300
(Figure 19).
Quelle est limpdance dentre Z e vue du plan P1 ?
l = 130
Z c = 200
Z T = 400 j 300
P1
Figure 19. Utilisation de labaque de Smith. Exemple 1 : circuit.
Solution :
l
l
La longueur lectrique est gale l = 2 , soit = 0,36 .
Les impdances reportes sur labaque de Smith sont normalises, donc nous reporterons :
Z
R jX
zT = T =
= r + jx = 2 j1,5 .
200
Zc
Portons cette valeur sur labaque de Smith lintersection des cercles r = 2 et x = 1,5 , soit
P0 (Figure 20).
En labsence de pertes, si lon sloigne de la charge, le point P0 se dplace sur le cercle de
rayon OP0, dans le sens des aiguilles dune montre. Le rayon de ce cercle nous permet,
laide de la rglette dispose prs de labaque, de dduire que le ROS de la ligne sera :
= 3,33 .
A partir du point P0 reprsentant la ligne la terminaison, on se dplace sur le cercle dfini
prcdemment dun angle de 260 ( 2 l ), ce qui donne le point P. P est lintersection des
cercles : re = 0,77 et xe = 1,09 , do limpdance dentre cherche :
Z e = (re + jxe )Z c = (0,77 + j1,09).200 , soit : Z e = 154 + j 218 .
On peut retrouver ce rsultat par calcul.
On peut galement partir dune ligne dfinie par ses paramtres physiques, par exemple une ligne
microruban, et donner la frquence du gnrateur, afin de calculer la longueur lectrique de la ligne.
Par exemple, si lon choisit une ligne sur substrat RO4003 (Rodgers) trs utilis en
hyperfrquences, dpaisseur 635 m et de permittivit relative r = 3,36 , pour 200 et 130
2 GHz, on obtient une ligne de largeur 32 m et de longueur 35,6 mm.
Philippe Ferrari
- 27 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Figure 20. Utilisation de labaque de Smith. Exemple 1 : abaque.
Philippe Ferrari
- 28 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
2.5.1.c.2 Exemple 2 : admittance
Dterminer ladmittance dentre Ye dune ligne de propagation dimpdance caractristique
Z c = 100 , de longueur lectrique 60, termine sur une impdance normalise z T = 1 + j 0,7 .
Solution :
Montrons dabord comment lon passe dune impdance une admittance sur labaque.
Nous avons montr quune ligne donde transformait une impdance de charge Z T en Z e
1
telle que : Z e Z T = Z c2 , soit en impdance normalise : ze zT = 1 , donc ze =
. Une
zT
(ligne donde) fait tourner de sur labaque. On en dduit donc que sur
4
labaque, pour passer de limpdance ladmittance, il suffit de prendre le symtrique
par rapport au centre de labaque.
La suite du raisonnement est calque sur lexemple 1.
On obtient : Ye = 0,00575 + j 0,0032 1 .
longueur
2.5.1.c.3 Adaptation dimpdance
On ralise ladaptation dune charge Z T = 20 + j 6 laide dun tronon de ligne courtcircuit de longueur l, plac une distance d de la charge (Figure 21). La frquence de travail est
gale 2 GHz. La permittivit relative effective du milieu est reff = 2.
d
M
Z c = 100
Z T = 20 j 6
l
CC
Figure 21. Utilisation de labaque de Smith. Exemple 3 : adaptation dimpdance.
Solution :
En M, nous devons combiner deux impdances :
Limpdance ramene par le tronon de longueur d termin par Z T ,
Limpdance ramene par le tronon de longueur l en court-circuit.
Il est de ce fait plus simple de raisonner en admittance car deux admittances en parallle sajoutent.
On souhaite que lensemble des tronons prsente un impdance gale Z c afin quil y ait
adaptation, c'est--dire une admittance normalise yM = 1 . Or la ligne court-circuite ramne en M
une admittance ycM = jb . Il faut donc quen M, le tronon de longueur d ramne une admittance
yTM = 1 jb . Donc le point reprsentatif de yTM doit se trouver sur le cercle dont la partie relle est
gale 1, soit le cercle passant par le centre de labaque. Sur labaque de Smith, pointons le point P0
Z
correspondant Z T : z T = T = 0,2 + j 0,06 (Figure 22). Nous raisonnons en admittance, donc yT
Zc
sobtient en prenant le symtrique de P0, soit Q0, par rapport au centre de labaque. Lorsque lon
Philippe Ferrari
- 29 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
sloigne de la charge yT , on se dplace sur le cercle de rayon OQ0 puisque les lignes sont
supposes sans pertes.
Ladmittance ramene par le tronon de longueur d doit se trouver sur lintersection entre ce cercle
et le cercle r = 1 , ce qui donne deux possibilits, reprsentes par les points M1 et M2, que nous
appelons solution 3-1 et solution 3-2.
Figure 22. Utilisation de labaque de Smith. Exemple 3 : abaque.
Philippe Ferrari
- 30 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Solution 3-1 : M1
La longueur d se dduit immdiatement : on tourne de Q0 vers M1 dans le sens
trigonomtrique, on parcourt donc : 0,5(1/2 tour ) 0,26 + 0,183 = 0,423 . La longueur
donde guide est gale : =
C
f reff
3.108
= 10,6 cm.
2.10 9 2
Donc d1 = 0,423.10,6 4,5 cm.
Ladmittance normalise ramene par le tronon de longueur d en M se lit sur labaque :
ydM1 = 1 + j1,75 . Pour que yM = 1 , il faut donc que le court-circuit ramne j1,75 .
Pointons ladmittance dun court-circuit, soit , ce qui donne le point CC. Lorsque nous
nous dplaons vers le point M, nous rencontrons ladmittance j1,75 au point CCM. Nous
avons alors parcouru 0,083 , donc l1 = 0,083.10,6 8,8 mm.
Solution 3-2 : M2
Nous obtenons respectivement : d 2 = 0,057.10,6 6 mm et l2 = 0,42.10,6 4,45 cm.
On peut dire que les deux solutions sont peu prs quivalentes car les longueurs mises en jeu sont
du mme ordre de grandeur.
2.5.2 Paramtres S - Matrices
Le but de ce paragraphe est de prsenter les matrices de rpartition et de transfert ainsi que
les matrices impdance et admittance, qui sont les plus utilises dans le domaine des
hyperfrquences.
Remarque prliminaire sur les notations :
Les ondes de courant et tension complexes sont nots V et I .
Les paramtres des matrices sont des complexes dans le cas gnral ; pour des raisons de
lourdeur dcriture, on omet la barre. Il en est de mme pour les ondes ai et bi.
2.5.2.a Paramtres S
2.5.2.a.1 Dfinition
La matrice S est une matrice donde comme nous allons le montrer par la suite. Nous
donnons sa dfinition pour un quadriple, sa gnralisation tant alors vidente.
On considre le quadriple de la Figure 23.
a1
b2
b1
a2
Figure 23. Quadriple.
La matrice reliant les ondes mergentes b1 et b2 aux ondes incidentes a1 et a2 scrit de la faon
suivante :
b1 S11 S12 a1
(71a)
b = S
2 21 S 22 a 2
Philippe Ferrari
- 31 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
b1 = S11a1 + S12 a 2
Do :
b2 = S 21a1 + S 22 a 2
Les paramtres Sij de la matrice sont appels paramtres S .
(71b)
2.5.2.a.2 Signification physique des paramtres S
La signification des paramtres S est la suivante :
b
S11 = 1
Cest le facteur de rflexion lentre, la sortie tant adapte.
a1 a =0
2
b
S 21 = 2
Cest le facteur de transmission entre sortie, la sortie tant adapte.
a1 a2 =0
b
S 22 = 2
Cest le facteur de rflexion en sortie, lentre tant adapte.
a 2 a1 =0
b
S12 = 1
Cest le facteur de transmission sortie entre, lentre tant adapte.
a 2 a1 =0
2.5.2.a.3 Intrt des paramtres S
Il existe pour ltude des quadriples linaires dautres paramtres bien connus : paramtres
H, Z, Y. La dtermination exprimentale de ces paramtres exige des mesures en court-circuit ou en
circuit ouvert. Au del de 100MHz, la condition circuit ouvert (impdance infinie) est difficile
raliser ; quant la mise en court-circuit, elle entrane souvent loscillation du montage. Au
contraire, les mesures des paramtres S se font sur entre et sortie adaptes et nentranent pas ces
difficults.
Par contre, elles ncessitent la mesure des ondes progressives et rgressives. Dans le domaine
frquentiel (rgime harmonique), des dispositifs appropris, les coupleurs directifs (qui seront
abords lors de ltude du principe des appareils de mesure), permettent laccs ces grandeurs.
Dans le domaine temporel (rponse indicielle ou impulsionnelle), ces ondes sont naturellement
spares dans le temps si lexcitation a atteint un rgime tabli avant le retour des ondes rgressives
dues aux rflexions.
La connaissance des paramtres S permet en outre de calculer simplement les grandeurs le plus
communment recherches : puissance, gain ou attnuation, facteur de rflexion sur un accs,
impdance dentre. Leur intrt pratique est donc grand.
2.5.2.a.4 Proprits
On considre un dispositif multi accs (multiple ou multiporte).
2.5.2.a.4.1 Rciprocit
La transmission de la porte i vers la porte j est la mme que la transmission de j vers i. Cest
toujours le cas lorsque les jonctions sont remplies dair ou de dilectriques non ferromagntiques.
On a alors :
S ij = S ji
(72)
La matrice S est symtrique par rapport la diagonale principale et :
S = ST
S T tant la matrice S transpose.
Philippe Ferrari
- 32 -
(73)
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
2.5.2.a.4.2 Conservation de lnergie pour des jonctions sans pertes
La puissance associe une onde ai ou bi scrit : Pi =
de ai. Le terme
1 *
ai ai , o a*i reprsente le conjugu
2
1
provient du fait que lon considre lamplitude des ondes.
2
Toutes les puissances associes aux ondes incidentes se retrouvent sur les ondes mergentes :
[a .a
1
*
1
] [
+ a 2 .a*2 + ... + a n .a*n = b1 .b1* + b2 .b2* + ... + bn .bn*
[a ][a* ]T = [b][b* ]T
[a ][a* ]T = [a* ]T [a ] = [a ]+ [a ]
Soit :
Or :
(76)
(77)
[a]+ [a] {[S ][a]}+ {[S ][a]} = 0
{[S ][a ]}+ = [a ]+ [S ]+
[a ]+ [a ] [a ]+ [S ]+ [S ][a ] = 0
[a ]+ {[I ] [S ]+ [S ]}[a ] = 0
[S ]+ [S ] = [I ]
Sachant que :
On obtient :
Et en dfinitive :
(74)
(75)
avec : [a ] =Matrice adjointe.
La conservation des puissances scrit donc :
[a]+ [a] [b]+ [b] = 0
+
(78)
(79)
Remarque importante : pour des multiples rciproques, la relation de conservation de lnergie
scrit :
[S ]* [S ] = [S ]2 = [I ]
(80)
2.5.2.b Relations liant les courants et tensions (Vi et Ii) aux ondes de tension (ai
et bi)
On considre le quadriple de la Figure 24.
I1
V1
I2
a1
b2
b1
a2
V2
Figure 24.
Les ondes de tension ai et bi sont dfinies de la faon suivante :
La puissance entrant laccs i scrit :
*
1
1
Pi = ai ai* = V+i I +i
2
2
La puissance sortant de laccs i scrit :
Philippe Ferrari
- 33 -
(81)
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Pi =
*
1 * 1
bi bi = Vi I i
2
2
En utilisant les relations (36) et (37) : Z c =
V+i
I +i
Vi
(82)
I i
on tire aisment :
ai =
V+i
Zc
Vi
; bi =
(83)
Zc
Des relations (81), on dduit :
ai + bi =
Vi
(84)
Zc
ai bi = Z c I i
et :
(85)
avec I i entrant dans le quadriple.
ai =
d'o :
Vi + Z c I i
bi =
Vi Z c I i
(86)
2 Zc
2 Zc
Pour le quadriple de la Figure 24, nous aurons donc :
V + Z c I1
V Z c I1
a1 = 1
b1 = 1
2 Zc
2 Zc
a2 =
et :
V2 Z c I 2
2 Zc
b2 =
(87)
V2 + Z c I 2
(88)
2 Zc
Les signes diffrents pour a2 et b2 par rapport a1 et b1 proviennent du fait que le courant I 2 sort
du quadriple.
Remarque fondamentale :
Les grandeurs a et b ont la dimension de la racine carre dune puissance et sexpriment en
1/ 2
W .
2.5.2.c Application des quadriples lmentaires
2.5.2.c.1 Impdance srie
On considre la Figure 25.
Z
I1
V1
Z0
I2
a1
b2
b1
a2
Z0
Figure 25. Impdance srie.
Nous tablirons en TD la matrice S du quadriple.
Philippe Ferrari
- 34 -
V2
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
2.5.2.c.2 Impdance parallle
On considre la Figure 26.
I1
I2
a1
V1
Z0
b2
b1
a2
Z0
V2
Figure 26. Impdance parallle.
Nous tablirons en TD la matrice S du quadriple.
2.5.2.c.3 Ligne de transmission avec accs adapts
La matrice S dune ligne de transmission dimpdance caractristique Z c , dexposant de
propagation , de longueur L, place entre deux lignes de mme impdance caractristique scrit :
0
exp( L )
exp( L )
0
2.5.2.d Quadriples en cascade
2.5.2.d.1 Problme li la matrice S
On montre trs simplement que la matrice S nest pas cascadable. On considre les deux
quadriples Q12 et Q34 en cascade de la Figure 27.
a1
b1
Q12
b2
a3
a2
b3
b4
Q34
a4
Figure 27.
Les matrices S de ces deux quadriples scrivent :
b1 S11
b = S
2 21
S12 a1
pour Q12 et
S 22 a 2
b3 S 33
b = S
4 43
S34 a3
pour Q34.
S 44 a4
Ces
deux
matrices
ne
peuvent
tre
cascades
quaux
seules
conditions :
a1 = b3 et a 2 = b4 ou a3 = b1 et a 4 = b2 , ce qui ne correspond pas la condition de cascadabilit qui
impose : a3 = b2 et a2 = b3 daprs la Figure 27.
Philippe Ferrari
- 35 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
2.5.2.d.2 Matrices de transfert.
On considre le quadriple reprsent la Figure 28.
I1
V1
I2
a1
b2
b1
a2
V2
Figure 28.
On utilise deux matrices dites matrices de transfert reliant les grandeurs de sortie dun quadriple
ses grandeurs dentre. La matrice ABCD relie les courants et tensions. La matrice T relie les ondes
incidentes et mergentes. Ces matrices de transmission ou cascade sont spcialement utilises
lorsque lon analyse une cascade de quadriples car la matrice globale est simplement le produit des
matrices individuelles.
2.5.2.d.3 Matrice ABCD
2.5.2.d.3.1 Dfinition
La matrice liant ( V1 , I1 ) ( V2 , I 2 ) est appele matrice cascade ou matrice de transfert
ABCD :
V1 A B V2
(89)
=
C
D
I
I
1
2
2.5.2.d.3.2 Cascade de deux matrices ABCD
On considre les deux quadriples en cascade de la Figure 29.
I1
I2
a1
V1
b1
Q12
b2
a2
I3
V2 V3
I4
a3
Q34
b3
b4
a4
V4
Figure 29.
V A
La matrice de chaque quadriple Q12 et Q34 scrit : 3 = 34
I 3 C34
V1 A12
I1 C12
V4
B34 V4
= [ABCD ]34 et
D34 I 4
I4
V2
B12 V2
= [ ABCD ]12
D12 I 2
I2
V A
La matrice de lensemble cascad scrit 1 = t
I1 Ct
multipliant les deux matrices du fait que V2 = V3 et I 2 = I 3 :
Philippe Ferrari
- 36 -
Bt V4
et sobtient simplement en
Dt I 4
IUT 1 Grenoble
V1 A12
=
I1 C12
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
B12 V2 A12
=
D12 I 2 C12
B12 V3 A12
=
D12 I 3 C12
B12 A34
D12 C34
V4
B34 V4
= [ABCD ]12 .[ABCD ]34
D34 I 4
I4
2.5.2.d.3.3 Passage Matrice S Matrice ABCD.
Nous tablirons en TD lexpression des paramtres S en fonction des paramtres ABCD (et
vice versa).
2.5.2.d.3.4 Applications
2.5.2.d.3.4.1 Matrice ABCD d'une ligne de transmission.
La matrice ABCD dune ligne de transmission d'impdance Z c , d'exposant de propagation
et de longueur L scrit (pour I 2 sortant) :
Ch(L ) Z c Sh(L )
Sh(L )
.
Ch(L )
Z c
Pour des lignes sans pertes ( = 0 = + j = j ) possdant des impdances caractristiques
relles Zc, on obtient donc :
Cos (L ) jZ c Sin(L )
.
jSin(L )
Cos (L )
Zc
Cest sous cette forme que nous lutiliserons dans ce cours car nous considrerons toujours des
lignes sans pertes et non dispersives.
2.5.2.d.3.4.2 Impdance d'entre d'une ligne de transmission en court-circuit ou circuit ouvert
L'impdance d'entre de la ligne de transmission prcdente termine par une impdance Z L
AZ L + B
.
CZL + D
L'impdance vue en entre de la ligne termine par un court-circuit puis par un circuit ouvert
B
A
sexprime Z e =
et Z e =
respectivement.
D
C
sexprime : Z e =
2.5.3 Graphes de fluence
Les graphes de fluence permettent une reprsentation graphique des phnomnes de
propagation des ondes et permettent de reprsenter les coefficients de rflexion, transmission,
attnuations et dphasage de manire trs visuelle. Cest un outil trs utilis par les automaticiens
car il offre une reprsentation plus compacte que les diagrammes fonctionnels.
Nous donnons dans un premier les quelques rgles de base puis quelques exemples dutilisation.
Philippe Ferrari
- 37 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
2.5.3.a Passage travers un systme
Nous considrons le systme possdant comme fonction de transfert ou paramtre S H ( )
(Figure 30). Si lentre du systme est a1 et la sortie a2, nous aurons :
a2 = H ( ).a1 .
(90)
H
a1
a2
Figure 30. Graphe de fluence. Passage travers un systme.
La fonction de transfert est reprsente par un triangle. Les signaux sont reprsents sur les fils,
laide de flches si ncessaire.
2.5.3.b Drivation
a2 = H 2 ( ).a1 et a3 = H 3 ( ).a1 .
H2
a1
H3
(91)
a2
a3
Figure 31. Graphe de fluence. Drivation.
2.5.3.c Combinaison
a1 = H 2 ( ).a2 + H 3 ( ).a3 .
a2
a3
(92)
H2
H3
a1
Figure 32. Graphe de fluence. Combinaison.
2.5.3.d Coefficient de rflexion entre deux lignes
On considre le circuit de la Figure 33 o deux lignes de propagation dimpdance
caractristique diffrente sont connectes entre elles.
Z c1
Z c2
Figure 33. Graphe de fluence. Coefficient de rflexion entre deux lignes - 1.
Philippe Ferrari
- 38 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Z c 2 Z c1
.
Z c 2 Z c1
Le graphe de fluence de la transition entre les deux lignes est celui de la Figure 34.
Le coefficient de rflexion scrit : =
a1
1+
b1
b2
a2
Figure 34. Graphe de fluence. Coefficient de rflexion entre deux lignes - 2.
Les quations liant a1 , b1 , a2 et b2 sont donc les suivantes :
b1 = a1 + (1 )a2 ; b2 = (1 + )a1 a2 .
(93)
2.5.3.e Exercice
On se propose dtablir le graphe de fluence du circuit de la Figure 35, o une ligne
dimpdance Z1 est insre entre deux lignes dimpdance Zc.
Zc
Z1
Zc
Figure 35. Graphe de fluence. Exercice.
2.6 Introduction au rgime temporel : rflectomtrie temporelle
Lanalyse des circuits hyperfrquences dans le domaine temporel est largement moins rpandue
que lanalyse harmonique, pour deux raisons essentielles :
1. Les systmes hyperfrquences fonctionnent gnralement sur des bandes de frquence
rduites, leur tude est donc naturellement effectue en rgime harmonique.
2. Lanalyse temporelle est plus complexe ds que les grandeurs manipuler dpendent de la
frquence de fonctionnement car alors les coefficients des quations diffrentielles donnant
les ondes de tension et de courant font apparatre des coefficients dpendant du temps.
Avec lavnement des systmes numriques, lanalyse temporelle commence cependant gagner du
terrain sur lanalyse harmonique, mais souvent on utilise la thorie de Fourier, et aprs analyse
harmonique, on dduit le comportement temporel par transformation de Fourier.
Dans ce paragraphe, lobjectif est de montrer les principes et quelques potentialits de lanalyse
temporelle.
2.6.1 Principe
Le principe de lanalyse temporelle consiste videmment tudier les signaux, ondes de tension
et de courant, en fonction du temps. Le gnrateur est soit un chelon, soit une impulsion de tension
(plus rarement), et lon mesure laide dun oscilloscope les ondes de tension transmises ou
rflchies. Lappareil permettant deffectuer ce travail se nomme Time Domain Reflectometer
(TDR), soit rflectomtre dans le domaine temporel. Bien que se nommant rflectomtre, cet
appareil permet bien en pratique de mesurer les ondes de tension rflchies et transmises. Pour la
mesure des ondes transmises, nous faisons rfrence TDT pour Time Domain Transmission .
La Figure 36 donne le synoptique dun banc de mesure TDR-TDT.
Philippe Ferrari
- 39 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Le systme est bidirectionnel, donc capable dexciter un circuit (quadriple) dans les deux sens de
propagation. Sur la Figure 36, une ligne de propagation dimpdance caractristique Z c est relie au
niveau des plans P1 et P2 aux deux ports (terme issu de lAnglais) ou accs du systme de mesure,
travers deux lignes dimpdance caractristique 50, qui constitue le standard en hyperfrquences.
Un port est constitu dun gnrateur ( Generator ) et dune tte dchantillonnage ( Sampling
head ). Le gnrateur dlivre un chelon de tension. La tte dchantillonnage se comporte comme
un oscilloscope classique et permet de visualiser lamplitude des tensions au niveau des ports (1) et
(2).
La bande passante atteinte aujourdhui par ces appareils est de 100 GHz au niveau commercial et
plus de 700 GHz en laboratoire, ce qui permet videmment lanalyse de signaux trs rapides .
P1
P2
Generator
Sampling
Head
Sampling
Head
50
Zc
Generator
50
Port (2)
Figure 36. Principe de lanalyse TDR. Synoptique.
Port (1)
Nous considrons pour simplifier la forme de gnrateur de la Figure 37 (a). Il sagit dun chelon
de tension damplitude V0 et possdant un temps de monte t r . Ltat de lart actuel en laboratoire
permet dobtenir des chelons de temps de montes de 720 fs, soit 10-15 secondes.
Commercialement, les appareils les plus rapides dlivrent des chelons de temps de monte 5 ps.
La Figure 37 (b) reprsente une impulsion de tension. On dfinit souvent la dure dune impulsion
laide de sa largeur mi hauteur.
v(t )
v(t )
V0
(a)
V0
(b)
tr
Figure 37. Principe de lanalyse TDR. Gnrateur.
Philippe Ferrari
- 40 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Z 0 = 50
e(t)
retard
1+
retard Tc
r(t)
retard
retard Tc
Z 0 = 50
Zc
1+
transitions
Figure 38. Graphe de fluence du systme de la Figure 36.
La Figure 38 reprsente le graphe de fluence correspondant au montage de la Figure 36.
On considre que lon excite la ligne de propagation dimpdance Zc par une impulsion de tension
e(t ) dlivre par le TDR. Cette impulsion de dpart (excitation) ainsi que le signal rflchi r (t ) sont
mesurs laide du port (1). Le retard Tc correspond au cble dimpdance caractristique Z0
reliant le TDR la ligne tester dimpdance caractristique Zc.
On peut aisment dduire lexpression de r (t ) laide du graphe de fluence :
r (t ) = .e(t 2Tc ) + (1 + )(1 )( )e(t 2 2Tc ) + 2 (1 + )(1 )( )e(t 4 2Tc ) + ... (94)
Soit en simplifiant :
r (t ) = e(t 2Tc ) 1 2 e(t 2 2Tc ) + 2e(t 4 2Tc ) + 4e(t 6 2Tc ) + ...
(95)
Soit la formule de rcurrence :
r (t ) = e(t 2Tc ) 1 2 2(i 1)e(t 2i 2Tc )
(96)
i =1
La Figure 39 reprsente le signal mesur sur le port (1) du TDR, savoir e(t ) + r (t ) , en considrant
)]
)(
uniquement les deux premires rflexions : r (t ) = .e(t 2Tc ) 1 e(t 2 2Tc ) .
e(t )
r (t )
V0
V1
2Tc
Figure 39. Signal rflchi mesur au TDR. Excitation impulsionnelle.
Le graphe de la Figure 39 permet de dduire de manire exprimentale les caractristiques de la
ligne de propagation :
Philippe Ferrari
- 41 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
Lamplitude V1 de la premire rflexion permet de dterminer directement le coefficient de
V
1+
rflexion : = 1 , do lon dduit limpdance caractristique de la ligne : Z c = Z 0
.
V0
1
1,5
= 150 .
Dans le cas de la Figure 39, on lit : = 0,5 , soit : Z c = 50
0,5
Lintervalle de temps entre les deux premires rflexions t est gal 2 , ce qui permet
dobtenir directement le temps de propagation sur la ligne t = 2 . A partir de ,
l
connaissant la longueur l de la ligne, on peut en dduire la vitesse de propagation : v = .
Considrons prsent une excitation indicielle telle que dcrit sur la Figure 37.
La Figure 40 reprsente galement le graphe de la tension mesure au niveau du port (1), en
considrant uniquement les premires rflexions, comme pour la Figure 39.
La rponse lexcitation en chelon, que lon pourrait nommer rponse indicielle , fournit les
mmes informations, et . La tension totale mesure par le TDR au niveau du port (1) est la
somme de la tension du gnrateur (excitation) et de la tension correspondant londe rflchie,
soit : vTotal (t ) = e(t ) + e(t 2Tc ) si lon considre uniquement la premire rflexion. Donc
V V0
V1 = VTotal = (1 + )V0 . Ainsi le coefficient de rflexion se calcule simplement par : = 1
.
V0
r (t )
V1
V0
e(t )
2Tc
0
Figure 40. Principe de lanalyse TDR. Gnrateur et rponse.
Le signal transmis s(t ) travers la ligne dimpdance caractristique Zc peut galement se dduire
simplement de lanalyse du graphe de fluence :
Exercice :
Etablir lexpression de londe de tension mesure au niveau du port (2).
En dduire le graphe temporel reprsentant le signal transmis au port (2).
On constate ainsi que le TDR est un appareil trs prcieux pour mesurer limpdance caractristique
dune ligne de propagation ou le temps de propagation, et par suite la vitesse de propagation des
signaux.
Lanalyse temporelle permet galement de mettre en vidence de manire trs claire les problmes
de diaphonie, c'est--dire de couplage entre deux lignes de propagation. Ce phnomne est trs
gnant et explique en particulier pourquoi la frquence de fonctionnement des cartes mres de PC
ont un moment, environ larrive sur le march des premiers processeurs Pentium, dont la
frquence de fonctionnement a rapidement dpass les 100 MHz, cess de suivre lvolution de la
frquence dhorloge des processeurs. Augmenter la frquence de fonctionnement implique en effet
Philippe Ferrari
- 42 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
de propager des signaux numriques possdant des fronts de monte ou descente de plus en plus
raides, qui induisent des phnomnes de couplage magntique entre lignes adjacentes.
La photo de la Figure 41 reprsente des lignes microruban couples, avec des espacements entre les
lignes diffrents.
Figure 41. Lignes microruban couples. Diaphonie.
La Figure 42 donne le schma de principe de deux lignes couples termines par une impdance
relle Rc gale 50. La ligne excite par laccs " est appele ligne principale . La ligne
perturbe est nomme ligne auxiliaire .
Rc
Rc
Rc
Rc
Figure 42. Lignes microruban couples. Schma de principe.
La mesure laide du TDR des signaux aux accs # (onde arrire) et $ (onde avant) lorsque la
ligne est excite par laccs " est donne sur la Figure 43.
Couplage rparti
0.3
Amplitude (Volts)
0.25
0.2
0.15
Gnrateur
Onde arrire
0.1
0.05
0
Onde avant
-0.05
-0.1
0
0.5
1.5
2.5
3.5
4.5
Temps (ns)
Figure 43. Lignes microruban couples. Mesure TDR.
Philippe Ferrari
- 43 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
On constate clairement un couplage entre les deux lignes. On pourrait montrer que lamplitude de
londe arrire dpend de lamplitude de londe sur la ligne principale alors que lamplitude de
londe avant dpend de sa drive, et donc du temps de monte de lexcitation. Cest ainsi londe
avant qui limite la monte en frquence des cartes mres de nos PC aujourdhui.
3 Principes de la CAO RF-ondes
La Conception Assiste par Ordinateur (CAO) joue un rle majeur aujourdhui dans tous les
domaines des sciences. Cest par exemple un outil indispensable dans lautomobile o lon fait ainsi
lconomie de crash-tests coteux, en mcanique o le calcul des ponts permet de valider des modes
de conception permettant dconomiser des tonnes de bton.
En lectronique, on ne conoit pas un systme complexe sans avoir recours aux logiciels de CAO.
En premire anne, nous avons travaill sous SPICE qui constitue le logiciel incontournable de
llectronicien. SPICE, conu lUniversit de Berkeley durant le dbut des annes 70, lorigine
pour des problmes lis la micro lectronique, a rapidement t appliqu tous les problmes de
llectronique. Il serait ainsi possible de lappliquer aux problmes de RF-hyperfrquences.
Cependant il est alors mal adapt et la mise en place des problmes savre lourde : la bibliothque
est peu riche en lignes, composants ou circuits hyperfrquences et lutilisation de la matrice S nest
pas naturelle.
Les concepteurs prfrent ainsi utiliser des logiciels de modlisation et de simulation ddis aux
problmes dans lesquels les phnomnes de propagation doivent tre pris en compte.
On peut distinguer dans un premier temps les problmes de modlisation et de simulation, mme si
en pratique les logiciels offrent aujourdhui ces deux aspects de manire intgre.
3.1 Modlisation
La modlisation consiste, partir de paramtres physiques : dimensions, caractristiques des
dilectriques, semi-conducteurs et conducteurs utiliss, dterminer un modle lectrique ou
mathmatique quivalent.
Le modle lectrique se prsente sous la forme dun circuit lectrique dans lequel on trouve les
lments de base des circuits : lignes de propagation, inductances, capacits, rsistances, diodes,
transistors, sources de courant et de tension. On peut noter que les lignes de propagation, diodes et
transistors peuvent tre modliss partir dinductances, capacits, rsistances, sources de courant
et de tension. En pratique cependant, afin dobtenir un aspect modulaire, des modles de lignes de
propagation, diodes et transistors spcifiques ont t dvelopps.
Le modle mathmatique consiste, dans le cas gnral, en une matrice de rpartition, qui permet de
relier les grandeurs dentre et de sortie du quadriple ou multiple considr. Il permet de driver
le modle lectrique.
Dans tous les cas, la modlisation repose sur la rsolution des quations de Maxwell qui constituent
une extension ou gnralisation des lois de llectrostatique (loi de Faraday ou Lenz ou Laplace ou
Lorentz) et de la magntostatique (thorme dAmpre), lensemble des problmes faisant
intervenir des champs lectrique et magntique. Ces quations seront abordes dans le cours
dlectronique du second semestre.
Lespace tant constitu de trois dimensions, la modlisation des phnomnes de propagation
impose en toute rigueur de modliser les circuits en considrant les trois dimensions. En pratique
cependant, la propagation seffectue souvent sur des lignes planaires, avec uniquement deux
directions de propagation possibles, permettant ainsi de restreindre le domaine dtude deux
dimensions. On trouve ainsi de manire commerciale des logiciels de modlisation en deux (2D) ou
Philippe Ferrari
- 44 -
IUT 1 Grenoble
Dt Gnie Electrique et Informatique Industrielle 2
Physique : phnomnes de propagation en radiofrquences
en trois dimensions (3D). Les logiciels 2D sont nettement plus rapides que leurs homologues 3D
pour rsoudre les problmes 2D. Ils sont galement souvent moins coteux.
3.2 Simulation
Lopration de simulation consiste exciter les modles mathmatiques ou lectriques obtenus
aprs modlisation, et de dterminer les ondes de tension ou de courant gnres dans le circuit
tudi, ainsi videmment qu ses extrmits.
Par exemple, si lon considre une rsistance R, qui constitue le modle lectrique dun fil en basse
frquence, et que lon injecte un courant i, le simulateur donnera une tension v aux bornes de la
rsistance proportionnelle au courant inject, du fait que le modle dune rsistance R est rgi par
lquation v = Ri .
Un logiciel de simulation est forcment coupl une modlisation amont car on ne peut simuler un
circuit que si lon connat son modle. On distingue alors plusieurs types de logiciels de simulation,
comme le dcrit la Figure 44 :
CAO base sur des modles dj dfinis dans des bibliothques.
CAO base sur des modlisations lectromagntiques partant des dimensions et
caractristiques lectriques et magntiques des matriaux.
Il est vident que la modlisation lectromagntique est toujours applicable. Cependant les temps de
calcul sont nettement plus longs, de lordre de 100 10000 fois selon la complexit du problme
trait. Chaque fois que les modles correspondant au problme trait sont fiables, on a donc recours
aux bibliothques, par exemple sur des problmes connus comme les guides dondes, les lignes
coaxiales, ou les lignes microruban.
Problme
traiter
Modles
Disponibles
?
OUI
NON
Utilisation
Bibliothque
Dimension
du problme
?
2D
Utilisation
simulateur 2D
3D
Utilisation
simulateur 3D
Figure 44. Classification des logiciels de CAO.
4 Principes des appareils de mesure RF-ondes
Systmes de mesure.ppt
Philippe Ferrari
- 45 -
Vous aimerez peut-être aussi
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Cours HF PDFDocument33 pagesCours HF PDFbiguéPas encore d'évaluation
- HF Partie1 IntroductionDocument62 pagesHF Partie1 Introductiondooudi hajarPas encore d'évaluation
- FrequenceDocument2 pagesFrequencemadouPas encore d'évaluation
- 3 Comprendre Les Ondes v2.0Document11 pages3 Comprendre Les Ondes v2.0bzh35rennesPas encore d'évaluation
- Telecoms: Formation Télécom Réseaux PléneufDocument347 pagesTelecoms: Formation Télécom Réseaux PléneufGAPas encore d'évaluation
- Micro OndeDocument54 pagesMicro Ondebotchakjacqueline100% (1)
- CM5-liaisons Hertziennes - Transmissions-NumériqueDocument65 pagesCM5-liaisons Hertziennes - Transmissions-NumériqueManaf AlmansourPas encore d'évaluation
- Cours de Propagation GuidéeDocument179 pagesCours de Propagation Guidéesoumaya bsdPas encore d'évaluation
- Cours HFDocument111 pagesCours HFomaima saadPas encore d'évaluation
- Chapitre1 CTCODocument21 pagesChapitre1 CTCOMe RePas encore d'évaluation
- Radiocom Microondes Master2 2015Document157 pagesRadiocom Microondes Master2 2015Faycel HamdiPas encore d'évaluation
- Chapitre I Rappel Sur Les Modulations AnDocument32 pagesChapitre I Rappel Sur Les Modulations AnBilal EL MANSSOURIPas encore d'évaluation
- Liaison Hertzienne 1Document8 pagesLiaison Hertzienne 1Zakariaa Bardai100% (1)
- Chapitre VDocument21 pagesChapitre VGhezai SoulafPas encore d'évaluation
- 02 La Propagation Des OndesDocument33 pages02 La Propagation Des OndesRoberly Fiston BlbPas encore d'évaluation
- Cours MicroondesDocument66 pagesCours MicroondesAbdelbari KhiarPas encore d'évaluation
- Module Les Bases de La DiffusionDocument39 pagesModule Les Bases de La DiffusionPacome Daniel Mba FongangPas encore d'évaluation
- Chapitre 1Document40 pagesChapitre 1Wathek BouzidiPas encore d'évaluation
- Electronique Embarqué 2020 VFDocument113 pagesElectronique Embarqué 2020 VFHamza MhalPas encore d'évaluation
- Cours AntennesDocument83 pagesCours Antennesgeo olendaPas encore d'évaluation
- HyperfrequenceDocument53 pagesHyperfrequencefabienPas encore d'évaluation
- Radiocom Microondes Master2 2015Document157 pagesRadiocom Microondes Master2 2015Said AkdarPas encore d'évaluation
- Ondes Electromagnetiques Cours 1 2Document4 pagesOndes Electromagnetiques Cours 1 2Ouàmar YounesPas encore d'évaluation
- Chapitre 3 Filtres Radio FréqDocument16 pagesChapitre 3 Filtres Radio FréqHiba TANTAOUIPas encore d'évaluation
- ch12 Numerisation Et Transmission de L Info ElDocument9 pagesch12 Numerisation Et Transmission de L Info ElVoundai Mahamat ValamdouPas encore d'évaluation
- UE Normes - Et - Protocoles - de - Transmission 2 - (GSM, GPRS, Umts)Document44 pagesUE Normes - Et - Protocoles - de - Transmission 2 - (GSM, GPRS, Umts)ludovic vedrinePas encore d'évaluation
- 00courstransmissionnumerique 220809171109 4ebbd423Document89 pages00courstransmissionnumerique 220809171109 4ebbd423AbdouMohamedPas encore d'évaluation
- 4transmision NumériqueDocument39 pages4transmision Numériqueنور الدينPas encore d'évaluation
- Introduction Aux Systèmes de CommunicationDocument23 pagesIntroduction Aux Systèmes de Communicationadel.benarabPas encore d'évaluation
- Procédés Physiques de Transmission de Données PDFDocument5 pagesProcédés Physiques de Transmission de Données PDFkimmikPas encore d'évaluation
- Cours Antennes Outils Modeles Transmission Oct14 v3Document156 pagesCours Antennes Outils Modeles Transmission Oct14 v3Oumar KOITAPas encore d'évaluation
- Rattrap AgeDocument2 pagesRattrap AgeRiad SiadiPas encore d'évaluation
- Cours EGT-FHDocument51 pagesCours EGT-FHKI Cedric100% (2)
- Cours Antennes Oct11 v4Document69 pagesCours Antennes Oct11 v4taharnebePas encore d'évaluation
- Lec 1Document49 pagesLec 1Gafry MahmoudPas encore d'évaluation
- Devoir N°1 TransmissionDocument5 pagesDevoir N°1 TransmissionOuloblyPas encore d'évaluation
- Poly TPOndesII L3PAPP2016 2017Document39 pagesPoly TPOndesII L3PAPP2016 2017Ahm DHPas encore d'évaluation
- BtsDocument41 pagesBtssaad joukPas encore d'évaluation
- Manuel Télécom LSI CompletDocument67 pagesManuel Télécom LSI CompletJunior LufwaPas encore d'évaluation
- Electronique Transmission Info Master 1 E3A 2015Document120 pagesElectronique Transmission Info Master 1 E3A 2015Mouctarfissiria BaldePas encore d'évaluation
- Polycope de BensebtiDocument67 pagesPolycope de Bensebtiالكترو الجزائريPas encore d'évaluation
- TPDocument3 pagesTPBilaPas encore d'évaluation
- Les Liaisons Hertziennes Numériques Très Haut Débit - Troisième EditionDocument27 pagesLes Liaisons Hertziennes Numériques Très Haut Débit - Troisième EditionBenjamin Senbai KorndoPas encore d'évaluation
- Devoir Faisceau HerzienDocument15 pagesDevoir Faisceau HerzienJames Ragive Dominique100% (4)
- Antenne Devoir 33 1Document20 pagesAntenne Devoir 33 1RaNià itPas encore d'évaluation
- Poly TP OndesII L3PAPP2014 2015 - newVF PDFDocument38 pagesPoly TP OndesII L3PAPP2014 2015 - newVF PDFL'ardu Sory SidibePas encore d'évaluation
- Cours N°1Document28 pagesCours N°1bochramiinfoPas encore d'évaluation
- Cours Antennes Oct11 v4 5RT PDFDocument79 pagesCours Antennes Oct11 v4 5RT PDFLI NAPas encore d'évaluation
- Cour Important AntenneDocument79 pagesCour Important AntenneBassma JioudiPas encore d'évaluation
- P CoursDocument23 pagesP CoursjustinisharabPas encore d'évaluation
- Examen de Radioelectricite IsptkDocument2 pagesExamen de Radioelectricite IsptkKABEYAPas encore d'évaluation
- Fonctionnement Des Reseaux GSM1Document18 pagesFonctionnement Des Reseaux GSM1Hanen Ahmadi100% (1)
- Banque de filtres: Aperçu des techniques de banque de filtres de Computer VisionD'EverandBanque de filtres: Aperçu des techniques de banque de filtres de Computer VisionPas encore d'évaluation
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- 3 Exercices Propagation Des Ondes Lumineuses PDFDocument5 pages3 Exercices Propagation Des Ondes Lumineuses PDFHAMADA197267% (3)
- TS - DM 2 - Phys 2-Chim 3Document2 pagesTS - DM 2 - Phys 2-Chim 3phytanjaPas encore d'évaluation
- Expose Television NumériqueDocument13 pagesExpose Television NumériqueLionel Jospin Tizzy ZraPas encore d'évaluation
- Part 3Document47 pagesPart 3ayman.ouhajjiPas encore d'évaluation
- Chapitre-1 Transmission OptiqueDocument14 pagesChapitre-1 Transmission OptiqueIbtissam AmezianPas encore d'évaluation
- Antennes SupCom 2018 PDFDocument123 pagesAntennes SupCom 2018 PDFzeineb ghobelPas encore d'évaluation
- TP1 - Analyseur Reseau - 2014 PDFDocument7 pagesTP1 - Analyseur Reseau - 2014 PDFyesPas encore d'évaluation
- TD Medecine Phy 100 20 21Document3 pagesTD Medecine Phy 100 20 21adjidavibruno7Pas encore d'évaluation
- Radiocristallographie TD Exercices 1Document5 pagesRadiocristallographie TD Exercices 1Miskine FilsPas encore d'évaluation
- Chapitre VDocument47 pagesChapitre VDB StorPas encore d'évaluation
- CC D'antenne Et Telecom Spacial TC1 - 2021Document2 pagesCC D'antenne Et Telecom Spacial TC1 - 2021Fotcha EricPas encore d'évaluation
- Hfe Akai Ea-A2 en FR PDFDocument20 pagesHfe Akai Ea-A2 en FR PDFcorentin bPas encore d'évaluation
- Chap 1 Cours RFDocument38 pagesChap 1 Cours RFNadir Ait MoussaPas encore d'évaluation
- MemoireDocument58 pagesMemoireBoubacar KeitaPas encore d'évaluation
- Interférences Lumineuses - SunudaaraDocument3 pagesInterférences Lumineuses - SunudaarafentanyltPas encore d'évaluation
- Trous D'youngDocument3 pagesTrous D'youngsacha willemanPas encore d'évaluation
- Surfer Sur La Vague, Bac S Am - Rique Du Nord 2013Document2 pagesSurfer Sur La Vague, Bac S Am - Rique Du Nord 2013xevniPas encore d'évaluation
- Fiche 8 - Le Materiel de SonorisationDocument3 pagesFiche 8 - Le Materiel de SonorisationPalmer Marc MercierPas encore d'évaluation
- Biophysique Vision PDFDocument5 pagesBiophysique Vision PDFChaima AchouriPas encore d'évaluation
- Fiche SpectrophotométrieDocument3 pagesFiche Spectrophotométriemohammed younes100% (1)
- Devoir 1Document2 pagesDevoir 1Phobos ElfaPas encore d'évaluation
- Sec Centrale 1999 Phy PSI PDFDocument8 pagesSec Centrale 1999 Phy PSI PDFbackhousiaPas encore d'évaluation
- Acoustique PhysiqueDocument29 pagesAcoustique PhysiqueAbdoulnassirou BassongouPas encore d'évaluation
- PFE Final Dahel FZDocument77 pagesPFE Final Dahel FZahlambouani123Pas encore d'évaluation
- Série 2Document4 pagesSérie 2FATIMA fatiiiPas encore d'évaluation
- Batterie - Le Sub Kick MaisonDocument2 pagesBatterie - Le Sub Kick MaisonWaskaiPas encore d'évaluation
- Ondesvide PDFDocument7 pagesOndesvide PDFjamaliPas encore d'évaluation
- Chap 4 Antennes Presentation2Document20 pagesChap 4 Antennes Presentation2Lilia BournanePas encore d'évaluation
- Decomp Serie Fourier Signal Periodique PDFDocument4 pagesDecomp Serie Fourier Signal Periodique PDFPhysisPas encore d'évaluation
- Trois Prétendants Un MariDocument6 pagesTrois Prétendants Un MarimbouladesireePas encore d'évaluation