Académique Documents
Professionnel Documents
Culture Documents
Sce FR 010-060 R1209 S7-1200 Pid
Transféré par
kinsourouTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Sce FR 010-060 R1209 S7-1200 Pid
Transféré par
kinsourouDroits d'auteur :
Formats disponibles
Industry Sector, IA&DT
Documentation de formation SCE Page 1 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
Module 010-060 TIA Portal
Asservissement en boucle ferme sur le
SIMATIC S7-1200
SCE Curriculum
pour la solution dautomatisation cohrente
Totally Integrated Automation (TIA)
Siemens Automation Cooperates with Education
Industry Sector, IA&DT
Documentation de formation SCE Page 2 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
Packages SCE pour formateurs adapts cette documentation
SIMATIC S7-1200 AC/DC/RELAIS (paquet de 6) "TIA Portal"
N de rfrence : 6ES7214-1BE30-4AB3
SIMATIC S7-1200 DC/DC/DC (paquet de 6) "TIA Portal"
N de rfrence : 6ES7214-1AE30-4AB3
SIMATIC S7-SW for Training STEP 7 BASIC V11 Upgrade (for S7-1200) (paquet de 6) "TIA Portal"
N de rfrence : 6ES7822-0AA01-4YE0
Veuillez noter que les packages pour formateurs ont parfois t remplacs par de nouveaux packages.
Vous pouvez consulter les packages SCE actuellement disponibles sous : www.siemens.com/sce/tp
Formations
Pour les formations Siemens SCE rgionales, contactez votre interlocuteur SCE rgional
www.siemens.com/sce/contact
Plus d'informations sur le programme SCE
www.siemens.com/sce
Remarque dutilisation
La documentation de formation pour la solution d'automatisation cohrente Totally Integrated Automation (T I A)
a t spcialement cre pour le programme "Siemens Automation Cooperates with Education (SCE)" des
fins de formation pour les instituts publics de formation et de R&D. Siemens AG nassume aucune responsabilit
quant au contenu.
Cette documentation ne peut tre utilise que pour une premire formation aux produits/systmes Siemens,
autrement dit elle peut tre copie, en partie ou en intgralit, pour tre distribue aux participants la formation
afin qu'ils puissent l'utiliser dans le cadre de leur formation. La diffusion et la duplication de cette documentation,
l'exploitation et la communication de son contenu sont autorises au sein dinstituts publics de formation et de
formation continue.
Toute exception requiert au pralable lautorisation crite de la part des interlocuteurs Siemens AG : Monsieur
Roland Scheuerer roland.scheuerer@siemens.com.
Toute violation de cette rgle expose son auteur au versement de dommages et intrts. Tous droits rservs,
en particulier en cas de dlivrance de brevet ou d'enregistrement d'un modle dpos.
Il est expressment interdit dutiliser cette documentation pour des cours dispenss des clients industriels.
Tout usage de cette documentation des fins commerciales est interdit.
Nous remercions lentreprise Michael Dziallas Engineering ainsi que toutes les personnes ayant contribu la
ralisation de cette documentation.
Industry Sector, IA&DT
Documentation de formation SCE Page 3 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
PAGE :
1. Avant-propos .............................................................................................................................................. 4
2. Notes concernant la programmation du SIMATIC S7-1200 ....................................................................... 6
2.1 Automate SIMATIC S7-1200 ...................................................................................................................... 6
2.2 Logiciel de programmation STEP 7 Professional V11 (TIA Portal V11) ..................................................... 6
3. Notions de base sur la rgulation en boucle ferme .................................................................................. 7
3.1 Tches de la rgulation en boucle ferme ................................................................................................. 7
3.2 Composition dune boucle ferme .............................................................................................................. 8
3.3 Etude des systmes asservis avec la fonction de Heaviside (fonction chelon) ...................................... 11
3.4 Systmes asservis avec autorgulation ................................................................................................... 12
3.4.1 Systme asservi proportionnel sans retard ...................................................................................... 12
3.4.2 Systme asservi proportionnel sans retard ...................................................................................... 13
3.4.3 Systme asservi proportionnel avec deux retards ........................................................................... 14
3.4.4 Systme asservi proportionnel avec retards dordre n ..................................................................... 15
3.5 Systmes asservis sans autorgulation ................................................................................................... 16
3.6 Rgulateurs continus standard ................................................................................................................. 17
3.6.1 Correction proportionnelle (rgulateur P) ......................................................................................... 18
3.6.2 Correction intgrale (rgulateur I) .................................................................................................... 20
3.6.3 Correcteur PI .................................................................................................................................... 21
3.6.4 Correction action drive (rgulateur D) ....................................................................................... 22
3.65 Correcteur PID ................................................................................................................................. 22
3.7 Objectifs du paramtrage dun correcteur ................................................................................................ 23
3.8 Rglages pour les systmes asservis ...................................................................................................... 25
3.8.1 Rglage du correcteur PI avec la mthode de Ziegler-Nichols........................................................ 26
3.8.2 Rglage du correcteur PI avec la mthode de Chien-Hrones-Reswick ........................................... 26
3.9 Rgulateurs numriques .......................................................................................................................... 28
4. Exemple d'application : rgulation du niveau d'une citerne ...................................................................... 30
5. Programmation de la rgulation de niveau pour le SIMATIC S7-1200 ..................................................... 31
Industry Sector, IA&DT
Documentation de formation SCE Page 4 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
1. Avant-propos
Le contenu du module SCE_FR_010-060 est assign l'unit "Notions de base sur la
programmation d'API". Il dcrit la programmation d'un rgulateur PID sur le SIMATIC S7-1200 avec le
portail TIA.
Objectif :
Dans ce module, le lecteur va se familiariser avec la programmation d'un rgulateur PID dans le
SIMATIC S7-1200 avec le logiciel TIA Portal. Le module fournit les notions de base et illustre les tapes
suivre en utilisant un exemple dtaill.
Pr-requis :
Les connaissances suivantes sont requises pour ltude de ce module :
Connaissance pratique des systmes dexploitation Windows
Notions de base sur la programmation d'API avec TIA Portal
(par exemple le module 010-010 - Initiation la programmation du SIMATIC S7-1200 avec TIA
Portal V11)
Blocs pour le SIMATIC S7-1200
(par exemple le module 010-020 - Types de blocs sur le SIMATIC S7-1200)
Traitement des valeurs analogiques dans SIMATIC S7-1200
(par exemple le module 010-050 Traitement des valeurs analogiques sur le SIMATIC S7-1200)
Fonctions supplmentaires
pour la programmation de
l'API Module 30
Notions de base sur
laprogrammation de l'API
Module 10, Module 20
PROFIBUS PROFINET
Module 60 Module 70
AS-Interface
Module 50
Technique de scurit
Module 80
Entranements
Module 100
Visualisation des
process (IHM) Module 90
Transducteurs
Module 110
Simulation de
l'installation SIMIT
Module 150
Autres langages de
programmation
Module 40
Industry Sector, IA&DT
Documentation de formation SCE Page 5 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
Configurations matrielles et logicielles requises
1 PC Pentium 4, 1.7 GHz 1 (XP) 2 Go RAM (Vista), env. 2 Go despace disponible
Systmes d'exploitation Windows XP Professional SP3/ Windows 7 Professional/Windows 7
Enterprise/Windows 7 Ultimate/Windows 2003 Server R2/Windows Server 2008 Premium SP1,
Business SP1, Ultimate SP1
2 Logiciel STEP7 Professional V11 SP1 (Totally Integrated Automation (TIA) Portal V11)
3 Connexion Ethernet entre PC et CPU 315F-2 PN/DP
4 API SIMATIC S7-1200, p.ex. CPU 1214C.
Les entres doivent tre mises en vidence sur un pupitre.
3 Connexion Ethernet
1 PC
2 STEP7 Professional
V11 (TIA Portal)
4 S7-1200 avec CPU
1214C
Industry Sector, IA&DT
Documentation de formation SCE Page 6 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
2. Notes concernant la programmation du SIMATIC S7-1200
2.1 Automate SIMATIC S7-1200
L'automate SIMATIC S7-1200 est un mini-contrleur modulaire utilis pour les petites et moyennes
performances.
Il existe un ventail complet de modules pour une adaptation optimise la tche d'automatisation.
Le contrleur S7 est compos dune alimentation lectrique, d'une CPU et de modules dentres/sorties
pour les signaux numriques et analogiques.
Le cas chant, des processeurs de communication et des modules fonctionnels sont ajouts pour des
tches spciales comme la commande de moteur pas pas.
Le programme S7 permet l'automate programmable industriel (API) de contrler et commander une
machine ou un processus. Les modules E/S sont interrogs dans le programme S7 au moyen
dadresses dentres (%E) et rfrencs au moyen dadresses de sorties (%A).
Le systme est programm avec le logiciel STEP 7.
2.2 Logiciel de programmation STEP 7 Professional V11 (TIA Portal V11)
Le logiciel STEP 7 Professional V11 (TIA Portal V11) est l'outil de programmation des automates
- SIMATIC S7-1200
- SIMATIC S7-300
- SIMATIC S7-400
- SIMATIC WinAC
Avec STEP 7 Professional V11, les fonctions suivantes peuvent tre utilises pour automatiser une
installation :
- Configuration et paramtrage du matriel
- Paramtrage de la communication
- Programmation
- Test, mise en service et dpannage avec les fonctions d'exploitation et de diagnostic
- Documentation
- Gnration dcrans de visualisation pour les Basic Panels SIMATIC avec WinCC Basic intgr.
- Il est galement possible de gnrer des crans de visualisation pour les PC et autres Panels
l'aide d'autres progiciels WinCC.
Toutes les fonctions sont dtailles dans laide en ligne.
Industry Sector, IA&DT
Documentation de formation SCE Page 7 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3. Notions de base sur la rgulation en boucle ferme
3.1 Tches de la rgulation en boucle ferme
Une rgulation en boucle ferme est un algorithme o la valeur d'une variable est tablie et maintenue
en permanence, grce une intervention s'appuyant sur les mesures effectues sur cette variable.
Il en dcoule un processus qui se droule dans une boucle ferme, appele boucle de rgulation, car la
procdure s'appuie sur la mesure d'une variable qui s'auto-entretient.
La variable rguler est mesure en permanence et compare une autre valeur donne de mme
type. Selon le rsultat de cette comparaison, le rgulateur va adapter la variable pour la rgler
correctement de faon ce quelle se rapproche au mieux de la consigne de dpart.
Schma d'une rgulation
Comparateur
Correcteur Actionneur
Organe de
rglage et
systme asservi
Appareil de
mesure
Temprature de consigne
Industry Sector, IA&DT
Documentation de formation SCE Page 8 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3.2 Composition dune boucle ferme
Les lments principaux de la rgulation en boucle ferme sont expliqus ci-dessous.
Voici d'abord une vue d'ensemble de cette rgulation reprsente par le schma-bloc suivant :
1. Variable asservie x :
La variable asservie x est lobjectif rel de l'asservissement en boucle ferme. Cela signifie que le but du
systme entier est de jouer sur cette variable ou de la garder constante. Dans notre exemple, ce serait
la temprature de la pice. La valeur instantane de cette variable un moment donn est appele
"valeur relle" ce moment.
2. Variable de rtroaction r
Dans une boucle d'asservissement, la variable asservie est constamment vrifie de manire
rpondre des changements inattendus. La variable mesure, dont la valeur est proportionnelle x, est
appele variable de rtroaction, ou de retour, r. Dans l'exemple "Chauffage", cela correspondrait la
tension du circuit de mesure du thermomtre intrieur au systme.
Comparateur
Correcteur
Appareil de
mesure
Systme
rgl
Rgulateur
Actionneur Actionneur
YR
Industry Sector, IA&DT
Documentation de formation SCE Page 9 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3. Perturbation z
La perturbation est une variable qui influe involontairement sur la variable asservie et la fait s'loigner de
la consigne actuelle. Dans le cas d'un asservissement consigne fixe, il est ncessaire de la prendre
en compte. Dans le systme de chauffage considr, cela pourrait tre la temprature extrieure ou
toute autre variable qui loignerait la temprature de la pice de sa valeur idale.
4. Consigne w
La consigne un instant donn est la valeur idale que devrait adopter la variable asservie au mme
instant. Il faut noter que la consigne peut changer en permanence dans certains cas, o la variable
rgulatrice agit sur l'organe rgulateur. La valeur mesure, dtermine grce un appareil de mesure si
la variable asservie tait exactement gale la consigne, est la valeur instantane de la variable de
rfrence. Dans l'exemple, la consigne serait la temprature de la pice dsire un instant donn.
5. Comparateur
C'est l'endroit o la valeur mesure actuelle de la variable asservie et la valeur instantane de la
variable de rfrence sont compares. Dans la plupart des cas, ces deux variables sont des tensions de
circuit mesures. La diffrence des deux variables est appele "e" pour "cart de rgulation". Elle est
transmise au correcteur pour valuation (voir plus bas).
6. Correcteur
Le correcteur est la cl de vote de l'asservissement en boucle ferme. Il value l'cart de rgulation
(pour dfinir si, comment et de combien la valeur mesure s'carte de la valeur de consigne) en la
prenant comme variable d'entre et en dduit en sortie la compensation corrective Y
R
qui influera
finalement sur la variable asservie. Dans l'exemple du systme de chauffage, la compensation
corrective serait la tension qui alimente le moteur du mlangeur.
La faon dont le correcteur dtermine la compensation corrective partir de l'erreur est le critre
principal de la rgulation. La partie II aborde ce sujet plus en dtails.
Industry Sector, IA&DT
Documentation de formation SCE Page 10 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
7. Actionneur
L'actionneur est proprement parler lagent excutif de la rgulation. Sous la forme de la compensation
corrective, il reoit du correcteur des informations lui servant agir sur la variable asservie, et comment
la changer en une valeur rglante. Dans notre exemple, l'actionneur serait le moteur du mlangeur. En
fonction de la tension fournie par le correcteur (la compensation corrective, donc), il influera sur la
position du mlangeur (qui ici reprsente la variable rglante).
8. Organe de rglage
Il s'agit de l'lment de la boucle d'asservissement qui, selon la variable rglante Y, joue plus ou moins
directement sur la variable asservie. Dans notre exemple, ce serait lensemble du mlangeur, des
tuyaux et des appareils de chauffage. Le mlangeur (variable rglante) est contrl par son moteur
(actionneur), et au moyen de la temprature de leau, influe sur la temprature de la pice.
9. Systme asservi
Le systme asservi est le systme o se trouve la variable rguler, ici, le radiateur du salon.
10. Retard
Le retard correspond au temps qui scoule entre le moment o la compensation corrective change et le
moment o une raction du systme asservi est mesure. Dans notre exemple, ce serait le temps entre
le changement de tension aux bornes du moteur du mlangeur et le changement mesurable de
temprature dans la pice qui en dcoule.
Industry Sector, IA&DT
Documentation de formation SCE Page 11 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3.3 Etude des systmes asservis avec la fonction de Heaviside (fonction chelon)
Pour tudier les performances des systmes asservis, des correcteurs et des boucles dasservissement,
une fonction uniforme est utilise comme signal dentre : la fonction de Heaviside, ou fonction chelon.
Selon quon tudie un seul lment de la boucle de rgulation ou la boucle entire, on applique la
fonction chelon la variable asservie x(t), la variable rglante y(t), la variable de rfrence w(t) ou la
perturbation z(t). Pour cette raison, le signal dentre (fonction de Heaviside) est nomm xe(t) et le
signal de sortie (rponse) xa(t).
pour
pour
Industry Sector, IA&DT
Documentation de formation SCE Page 12 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3.4 Systmes asservis avec autorgulation
3.4.1 Systme asservi proportionnel sans retard
Ce systme asservi est appel systme P.
Changement brusque de la valeur d'entre pour t0
Variable asservie / variable rglante :
Variable asservie / perturbation :
Kss : coefficient de proportionnalit (gain) pour une
variations de variable rglante
Ksz : Valeur proportionnelle pour une modification de
perturbation
Plage de rglage : yh = ymax ymin
Etendue de rgulation : xh = xmax xmin
Industry Sector, IA&DT
Documentation de formation SCE Page 13 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3.4.2 Systme asservi proportionnel sans retard
Ce systme asservi est appel systme P-T1.
Equation diffrentielle pour un signal d'entre gnral xe(t):
Solution de l'quation diffrentielle pour une fonction chelon l'entre (rponse indicielle) :
T
s
: Constante de temps
Industry Sector, IA&DT
Documentation de formation SCE Page 14 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3.4.3 Systme asservi proportionnel avec deux retards
Ce systme asservi est appel systme P-T2.
Fig. : Rponse indicielle du systme P-T2
Tu : temps de retard Tg : temps de compensation
Le systme est constitu par le montage en srie sans effet de retour de deux systmes P-T1 qui ont
pour constantes de temps TS1 et TS2.
Possibilit de rgulation des systmes P-Tn
Lorsque le rapport Tu / Tg augmente, le systme est de plus en plus difficile rguler.
facilement
rgulable
encore rgulable
difficilement
rgulable
Industry Sector, IA&DT
Documentation de formation SCE Page 15 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3.4.4 Systme asservi proportionnel avec retards dordre n
Ce systme asservi est appel systme P-Tn.
Le temps de rponse est ici dtermin par une quation diffrentielle dordre n. La courbe de rponse
indicielle est similaire celle dun systme dordre 2 (P-T2). La rponse temporelle est dcrite via Tu et
Tg.
Simplification : un systme asservi avec de nombreux temps de retard peut tre remplac par
approximation par le montage en srie d'un systme P-T1 temps mort.
On a : Tt Tu et TS Tg.
Rponse indicielle de remplacement du systme P-Tn
Industry Sector, IA&DT
Documentation de formation SCE Page 16 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3.5 Systmes asservis sans autorgulation
Aprs une perturbation, la variable asservie augmente indfiniment, sans essayer d'atteindre une valeur
finale fixe.
Exemple : Contrle de niveau
Un conteneur avec un tuyau dcoulement dont les volumes de flux entrant et sortant sont gaux
maintient son niveau de remplissage constant. Si le dbit du flux entrant ou sortant change par rapport
lautre, le niveau monte ou diminue. Plus la diffrence de dbit entre les deux est grande, plus la vitesse
de vidage ou de remplissage du conteneur est grande.
Cet exemple montre quen pratique laction intgrale a souvent une limite. La valeur de la variable asservie
augmente ou diminue aussi longtemps quelle na pas atteint une valeur limite au systme : dbordement
du conteneur ou conteneur vide. Mme ide pour une pression maximum ou minimum par exemple.
La figure ci-dessous montre la rponse dun systme intgral par rapport au temps si la variable
dentre change brutalement, et le schma-bloc driv de celui-ci :
Si l'chelon l'entre passe une fonction xe(t) quelconque, on a
*Figure tire de SAMSON Technical Information -L102 Controllers and Controlled Systems, Edition: Aot 2000
(http://www.samson.de/pdf_en/l102en.pdf)
Schma-bloc
y
max
x
max
x
a
(t)=K
IS
x
e
(t)dtsystmeasserviintgral
K
is
:coefficientd'intgrationdusystmeasservi
Industry Sector, IA&DT
Documentation de formation SCE Page 17 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3.6 Rgulateurs continus standard
Les rgulateurs discrets vus ci-dessus ont lavantage dtre simples. Le rgulateur lui-mme, tout
comme lactionneur et l'organe de rglage, est de nature simple et ainsi moins cher quun rgulateur
continu. Cependant, les rgulateurs discrets ont bon nombre de dsavantages. Par exemple, si de
grosses charges comme des gros moteurs lectriques ou des refroidisseurs doivent tre commutes,
des grands pics de charge peuvent se produire, ce qui peut surcharger lalimentation. Pour cette raison,
on ne commute gnralement pas entre "On" et "Off", mais plutt entre "Pleine puissance" et "Bas
rgime", o les performances des actionneurs et de l'organe de rglage sont considrablement
diminues. Mais mme avec ces amliorations, un correcteur discret nest pas compatible pour de
nombreuses applications. Imaginez un moteur de voiture dont la vitesse est rgule discrtement. Il ny
aurait rien entre larrt et la pleine vitesse. Mme si on ignore le fait quil serait impossible de transmettre
les forces des roues la route de manire constante lors d'un passage soudain pleine vitesse, une
telle voiture serait totalement inadapte la circulation urbaine. Pour ce type d'applications, on utilise
donc des rgulateurs continus. Dans ce cas, thoriquement, il ny a presque aucune limite la
corrlation mathmatique que le correcteur tablit entre lcart de rgulation en entre et la
compensation corrective en sortie. En pratique, on diffrencie trois types standards de correcteurs
continus qui sont traits dans la suite de ce guide.
Industry Sector, IA&DT
Documentation de formation SCE Page 18 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3.6.1 Correction proportionnelle (rgulateur P)
Dans le cas d'un rgulateur P, la variable rglante y est toujours proportionnelle lcart de rgulation
mesur (y ~ e). Il en rsulte que le correcteur P ragit sans retard un cart de rgulation et gnre une
variable rglante uniquement en prsence d'un cart e.
Le rgulateur proportionnel de pression reprsent dans la figure ci-dessous compare la force FS du
ressort de consigne avec la force FB que la pression p2 gnre dans le soufflet mtallique ressorts
lastiques. Si les forces ne sont pas quilibres, le levier tourne autour du point de pivot D. La position
de la soupape change et la pression p2 est alors rgule jusqu ce quun nouvel quilibre des forces
stablisse.
Le comportement du correcteur P en cas d'cart soudain est prsent ci-aprs. Lamplitude de la
rponse de la variable rglante y dpend de limportance de lcart e et de la valeur du gain (coefficient
de proportionnalit) Kp :
pour garder un cart faible, un facteur proportionnel aussi grand que possible doit tre choisi. Une
augmentation du coefficient entrane une rponse plus rapide du correcteur. Toutefois, une valeur trop
grande pourrait provoquer des dpassements et une grande instabilit de la part du correcteur.
* Figure et texte tirs de SAMSON Technical Information - L102 Controllers and Controlled Systems, Edition:
aot 2000 (http://www.samson.de/pdf_en/l102en.pdf)
Soufflet
mtallique
Ressortde
consigne
Industry Sector, IA&DT
Documentation de formation SCE Page 19 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
Le graphe ci-dessous montre le comportement dun correcteur P :
Les avantages de ce type de correcteur rsident dune part dans sa simplicit (l'implantation
lectronique peut, dans le cas le plus simple, se composer dune seule rsistance), et dautre part dans
sa rapidit de rponse par rapport dautres correcteurs. Mais son dfaut principal est lcart de
rgulation permanent, la consigne nest jamais compltement atteinte, mme long terme. Cet
inconvnient, tout comme le temps de rponse pas encore idal, ne peut tre minimis suffisamment en
appliquant un gain plus grand, puisqu'il y a alors risque de dpassement, c'est--dire de sur-raction du
correcteur. Dans le pire des cas, le correcteur entre dans un tat oscillatoire permanent. La variable
rglante est priodiquement loigne de la consigne, non plus par une perturbation, mais par le
correcteur lui-mme.
Le problme de lcart de rgulation permanent est mieux rsolu avec un correcteur intgral.
Ecartde
rgulation
Grandeurrgle
Consigne
Valeurrelle
Heure
Industry Sector, IA&DT
Documentation de formation SCE Page 20 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3.6.2 Correction intgrale (rgulateur I)
Les correcteurs action intgrale sont utiliss pour annuler compltement les carts de rgulation
chaque point de fonctionnement. Tant que lcart nest pas nul, la valeur de la variable rglante change.
Cest seulement lorsque la variable de rfrence et la variable rglante sont gales (au plus tard lorsque
la variable rglante atteint une valeur limite au systme (Umax, Pmax, etc.) que le systme asservi est
dans un tat stable.
Lquation mathmatique du comportement intgral est la suivante : La variable rglante est
proportionnelle lintgrale de temps de lcart de rgulation.
La vitesse laquelle la valeur de la variable rglante crot (ou dcrot) dpend de lcart de rgulation et
du temps d'intgration.
* Figure et texte tirs de SAMSON Technical Information - L102 Controllers and Controlled Systems, Edition:
aot 2000 (http://www.samson.de/pdf_en/l102en.pdf)
Schma-bloc
e
max
y
max
avec:
Industry Sector, IA&DT
Documentation de formation SCE Page 21 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3.6.3 Correcteur PI
Le correcteur PI est souvent utilis dans la pratique. Il est obtenu en connectant un correcteur P et un
correcteur I en parallle
Dispos correctement, il runit les avantages des deux correcteurs (stabilit et rapidit, pas dcart de
rgulation constant), compensant en mme temps leurs inconvnients respectifs.
Le comportement par rapport au temps est caractris par un gain Kp et un temps d'intgration Tn.
Grce la partie proportionnelle, la variable rglante rpond immdiatement chaque cart, alors que
la partie intgrale ne prend effet quau cours du temps. Tn reprsente le temps qui s'coule jusqu' ce
que la partie I cre une amplitude de rglage gale celle qui apparat immdiatement dans la partie P
(Kp). De mme que pour le correcteur I, le temps d'intgration Tn doit tre diminu si l'on veut
augmenter la partie intgrale.
Dimensionnement du correcteur :
Selon les valeurs prises par le gain Kp et le temps Tn, le dpassement de la variable rglante peut tre
rduit au dtriment de la rponse dynamique du systme asservi.
Applications dun correcteur PI : boucles dasservissement rapides qui nautorisent pas d'cart de
rgulation constant.
Exemples : pression, temprature et contrle de rapports.
* Figure et texte tirs de SAMSON Technical Information - L102 Controllers and Controlled Systems, Edition:
aot 2000 (http://www.samson.de/pdf_en/l102en.pdf)
Schma-bloc
e
max
y
max
Industry Sector, IA&DT
Documentation de formation SCE Page 22 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3.6.4 Correction action drive (rgulateur D)
Le correcteur D gnre sa variable rglante partir de la vitesse de variation de l'cart de rgulation et
non de son amplitude, comme le fait le correcteur P. Pour cette raison, il rpond considrablement plus
vite que ce dernier. Mme si lcart est faible, il gnre un signal de grande amplitude ds quune
variation damplitude se produit, comme sil essayait de prvoir lcart. Cependant, le correcteur D ne
dtecte pas les carts de rgulation constants, car peu importe leur amplitude, leur taux de variation est
nul. Pour cette raison, ce correcteur nest que rarement utilis tout seul en pratique. Par contre, il est
utilis conjointement avec dautres correcteurs, notamment avec un correcteur proportionnel.
3.65 Correcteur PID
Si on rajoute une action D notre correcteur PI, on cre le correcteur PID, trs souvent utilis. Comme
dans le cas du correcteur PD, lajout dune action D a pour effet, si mont correctement, daugmenter la
rapidit de l'atteinte de consigne et de l'oscillation de la variable asservie.
* Figure et texte tirs de SAMSON Technical Information - L102 Controllers and Controlled Systems, Edition:
aot 2000 (http://www.samson.de/pdf_en/l102en.pdf)
Schma-bloc
e
max
y
max
avec
Industry Sector, IA&DT
Documentation de formation SCE Page 23 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3.7 Objectifs du paramtrage dun correcteur
Pour que le rsultat de lasservissement soit satisfaisant, choisir un bon correcteur est essentiel. Mais,
encore plus important, il faut savoir paramtrer correctement les paramtres Kp, Tn et Tv, qui doivent
tre ajusts au comportement du systme asservi. La plupart du temps, on doit faire un compromis
entre un asservissement trs stable mais lent ou trs dynamique mais moins stable, qui peut avoir
tendance osciller sous certaines circonstances et donc devenir instable.
Dans le cas des systmes non linaires qui fonctionnent toujours au mme point (comme ceux
consigne fixe), les paramtres du correcteur doivent tre ajusts au comportement du systme asservi
en ce point. Si, comme dans le cas des servocommandes, tel point de fonctionnement ne peut tre
dfini, il faut trouver un rglage qui fournira un rsultat suffisamment rapide et stable sur toute la plage
de fonctionnement.
En pratique, le paramtrage du correcteur se fait exprimentalement, travers plusieurs essais.
Sil nest pas possible de le rgler de cette faon, le comportement du systme asservi doit tre analys
prcisment, pour ensuite pouvoir (grce des calculs thoriques et pratiques) rentrer les bons
paramtres dans le correcteur.
Une possibilit pour le rglage empirique est la mthode de Ziegler-Nichols. Elle fournit une
reprsentation simple applicable dans de nombreux cas. Cependant, cette procdure de paramtrage
ne peut tre utilise que pour les systmes asservis qui peuvent faire osciller leur sortie
automatiquement. Le protocole suivre dans ce cas est le suivant :
Sur le correcteur, mettre les paramtres Kp et Tv au plus bas, et Tn au plus haut (rglage ayant le
moins d'effet).
Mettre manuellement le systme asservi au point de fonctionnement dsir (dbut de la rgulation).
Rgler la variable rglante la valeur choisie manuellement, puis passez en mode automatique.
Augmenter Kp (rduire Xp) jusqu ce que les oscillations harmoniques de la grandeur rgle soient
reconnues. Si possible, la boucle dasservissement doit tre stimule pour osciller pendant que Kp est
rinitialis, l'aide de petits changements brusques de consigne.
*Texte tir de SAMSON Technical Information -L102 Controllers and Controlled Systems, Edition: Aot 2000
(http://www.samson.de/pdf_en/l102en.pdf)
Industry Sector, IA&DT
Documentation de formation SCE Page 24 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
Noter la valeur de Kp dfinie comme valeur critique du gain Kp,crit. Dterminer la dure dune oscillation
complte en tant que TCrit, ventuellement avec un chronomtre en faisant une moyenne arithmtique
des plusieurs oscillations.
Multiplier les valeurs de Kp,crit et Tcrit selon la table ci-dessous et rentrer ensuite les valeurs trouves
de Kp, Tn et Tv dans le correcteur.
* Figure et texte tirs de SAMSON Technical Information - L102 Controllers and Controlled Systems, Edition:
aot 2000 (http://www.samson.de/pdf_en/l102en.pdf)
K
p,crit
K
p,crit
K
p,crit
T
crit
T
crit
T
crit
Industry Sector, IA&DT
Documentation de formation SCE Page 25 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3.8 Rglages pour les systmes asservis
Le paramtrage dun systme asservi seffectue en se basant sur lexemple dun systme PT2.
T
u
-T
g
-Approximation
La base des mthodes de Ziegler-Nichols et de Chien-Hrones-Reswick est lapproximation du terme T
u
-
T
g
, qui dtermine le coefficient de transfert du systme asservi K
S
, le temps de retard T
u
et le temps de
compensation T
g
laide de la rponse indicielle
Les rgles de configuration dcrites ci-dessous ont t trouves de manire exprimentale en utilisant
des simulations sur ordinateur analogique.
Il est possible de dcrire des systmes P-T
N
avec suffisamment de prcision en utilisant l'approximation
T
u
-T
g
, par lapproximation au moyen d'un systme P-T
1
-T
L
.
Le point de sortie est la rponse indicielle du systme une entre chelon d'amplitude K. Les
paramtres recherchs, savoir, valeur du coefficient de transfert du systme K
S
, temps de retard T
u
et
temps de compensation T
g
sont dtermins comme le montre la figure ci-dessous.
Il faut mesurer la fonction de l'tape de transition jusqu ce quon atteigne la valeur finale de ltat
stationnaire (K*KS), afin de dterminer la valeur du coefficient de transfert du systme K
S
ncessaire
aux calculs.
L'avantage principal de cette mthode est que cette approximation peut aussi tre utilise si le systme
asservi nest pas tudiable analytiquement.
Figure : T
u
-T
g
-Approximation
Point d'inflexion
K*K
S
T
g
T
u
t/sec
x / %
Industry Sector, IA&DT
Documentation de formation SCE Page 26 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3.8.1 Rglage du correcteur PI avec la mthode de Ziegler-Nichols
En tudiant les systmes P-T
1
-T
L
, Ziegler et Nichols ont dcouvert les paramtres optimaux du
correcteur pour un asservissement consigne fixe :
K
S
T
u
T
g
K
PR
= 0,9
T
N
= 3,33 T
u
Ce rglage donne en gnral une rponse satisfaisante aux perturbations. [7]
3.8.2 Rglage du correcteur PI avec la mthode de Chien-Hrones-Reswick
En ce qui concerne cette mthode, la rponse aux modifications de consigne tout comme la rponse
aux perturbations est tudie dans le but dobtenir les meilleurs paramtres possibles. Diffrentes
valeurs rsultent suivant les deux cas. De plus, les deux rglages sont respectivement effectus afin de
rpondre aux diffrentes conditions pour obtenir un asservissement de qualit.
Ces rglages sont les suivants :
Pour les perturbations :
A
S
T
u
T
g
A
PR
= 0,6
T
N
= 4 T
u
Rgime transitoire apriodique
avec dure la plus courte
A
S
T
u
T
g
A
PR
= 0,7
T
N
= 2,3 T
u
Dpassement 20 % dure
minimale d'oscillation
Industry Sector, IA&DT
Documentation de formation SCE Page 27 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
Pour les changements de consigne :
A
S
T
u
T
g
A
PR
= 0,35
T
N
= 1,2 T
g
Rgime transitoire apriodique avec
dure la plus courte
A
S
T
u
T
g
A
PR
= 0,6
T
N
= T
g
Dpassement 20 %
dure minimale d'oscillation
Industry Sector, IA&DT
Documentation de formation SCE Page 28 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3.9 Rgulateurs numriques
Jusquici, nous avons principalement vu les correcteurs analogiques, c'est--dire des correcteurs qui
traitent la valeur analogique de l'cart de rgulation pour en dduire de manire analogique une
compensation corrective. Le schma dun tel asservissement est maintenant connu :
Cependant, il est souvent avantageux de passer lvaluation de lerreur en numrique. Dun ct, la
relation entre lcart et la compensation peut tre dtermine avec beaucoup plus de souplesse si elle
est dfinie par un algorithme ou une formule avec laquelle un ordinateur peut tre programm, plutt
que davoir le mettre en uvre sous la forme dun circuit analogique. Dun autre ct, une intgration
nettement meilleure des circuits est possible en ingnierie numrique, pour quun plus grand nombre de
correcteurs puissent tenir dans un espace plus restreint. Et enfin, en distribuant des temps de calcul (si
les capacits de lordinateur le permettent), il est mme possible dutiliser un seul ordinateur pour piloter
le correcteur de plusieurs boucles dasservissement.
Pour quun traitement numrique des variables soit possible, la variable dentre de rfrence ainsi que
la variable de retour sont dabord converties par un convertisseur analogique/numrique (CAN) en
variables numriques. Ensuite, un comparateur numrique soustrait lun par rapport lautre, et la
diffrence est transmise dans le correcteur numrique. La sortie du correcteur est alors reconvertie
son tour en une variable analogique, en passant travers un convertisseur numrique/analogique
(CNA). Ainsi, lensemble des convertisseurs, du comparateur et du correcteur apparat comme un
rgulateur analogique.
Rgulateur
analogique
Systme
Comparateur
Industry Sector, IA&DT
Documentation de formation SCE Page 29 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
Le schma-bloc ci-dessous reprsente la configuration dun rgulateur numrique :
Malgr les avantages de la conversion numrique du correcteur, certains inconvnients subsistent. Pour
cette raison, les valeurs de plusieurs variables en lien avec le correcteur numrique doivent tre choisies
suffisamment grandes pour que la prcision du correcteur ne soit pas compromise. Les critres de
qualit pour les convertisseurs numriques sont :
La rsolution du convertisseur numrique-analogique.
Elle indique quel point une plage de valeurs donne est correctement quantifie. La rsolution doit tre
assez grande pour que le correcteur ne perde pas dinformation lors de la conversion.
Le taux dchantillonnage du convertisseur numrique-analogique.
Il se rapporte la frquence laquelle les valeurs analogiques en cours de lecture dans le convertisseur
sont mesures et numrises. Il doit tre assez lev pour que le correcteur puisse rpondre
suffisamment rapidement aux variations de la variable asservie.
Le temps de cycle
Chaque rgulateur numrique procde selon des cycles dhorloge, la diffrence dun correcteur
analogique. La vitesse de lordinateur utilis doit tre suffisamment grande pour quil ny ait pas de
changements remarquables de la variable asservie durant un temps de cycle (temps durant lequel la
variable de sortie est calcule et durant lequel aucune entre nest prise en compte).
La qualit dun rgulateur numrique doit tre suffisamment leve pour que vu de lextrieur il rponde
aussi rapidement et prcisment quun rgulateur analogique.
Comparateur
Rgulateur
numrique
Systme
CNA
ADU
ADU
Industry Sector, IA&DT
Documentation de formation SCE Page 30 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
4. Exemple d'application : rgulation du niveau d'une citerne
Dans ce module nous allons programmer une rgulation de niveau.
Un capteur mesure le niveau dans une citerne et le convertit en une tension allant de 0 +10V.
Dans notre cas, 0V correspond un niveau de 0L et +10V un niveau de 1000L.
Ce capteur est connect la premire entre analogique du SIMATIC S7-1200.
Ce niveau doit maintenant tre rgul alternativement pour tre 0L (S1==0) ou 700L (S1==1).
Pour ce faire, un rgulateur PID_Compact inclus dans STEP 7 Basic V10.5 est utilis. Ce rgulateur
PID contrle son tour une pompe en tant que variable rglante via 0-10V.
Tableau d'affectations :
Adresse Symbole Type de donnes Commentaire
%EW 64 X_Fuell_Tank1 Int Entre analogique valeur relle niveau de la
citerne 1
%AW 80 Y_Fuell_Tank1 Int Sortie analogique variable rglante pompe 1
%E 0.0 S1 Bool Saut de la consigne niveau 0 (0) ou 700 litres (1)
Industry Sector, IA&DT
Documentation de formation SCE Page 31 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
5. Programmation de la rgulation de niveau pour le SIMATIC S7-1200
La gestion du projet et sa programmation se font grce au logiciel Totally Integrated Automation
Portal.
L, sous une mme interface, les lments tels que le contrleur, la visualisation et la mise en rseau
de la solution dautomatisation sont crs, paramtrs et programms.
Les outils en ligne sont disponibles pour les diagnostics derreur.
Les tapes ci-dessous montrent comment crer un projet pour SIMATIC S7-1200 et programmer la
solution pour cette application.
1. Loutil que nous allons utiliser est Totally Integrated Automation Portal, que lon appelle ici dun
double-clique. ( Totally Integrated Automation Portal V11)
Industry Sector, IA&DT
Documentation de formation SCE Page 32 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
2. Les programmes pour SIMATIC S7-1200 sont grs sous forme de projets. Nous allons maintenant
crer un nouveau projet via la vue du portail ( Create new project (Crer un projet) Tank_PID
(Citerne_PID) Create (Crer)).
Industry Sector, IA&DT
Documentation de formation SCE Page 33 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
3. L'option First steps (Mise en route) est propose pour la configuration. En premier lieu, nous
allons configurer un appareil. ( First steps (Mise en route) Configure a device (Configurer un
appareil))
Industry Sector, IA&DT
Documentation de formation SCE Page 34 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
4. Puis, nous allons ajouter un appareil avec le nom dappareil controller_tank
(rgulation_citerne). Dans le catalogue, choisir la CPU 1214C avec la rfrence correcte.
( Add new device (Ajouter un appareil) controller_tank (rgulation_citerne) CPU 1214C
6ES7 . Add (Ajouter))
Industry Sector, IA&DT
Documentation de formation SCE Page 35 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
5. Le logiciel passe automatiquement vers la vue du projet avec la configuration matrielle ouverte.
Ici, on peut ajouter des modules supplmentaires depuis le catalogue du matriel (fentre de
droite). A laide dun glisser-dposer on ajoute le Signal Board pour une sortie analogique.
( Catalog (Catalogue) Signal Board AQ1 x 12 bits 6ES7 232-)
Industry Sector, IA&DT
Documentation de formation SCE Page 36 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
6. Dans la Vue d'ensemble des appareils on peut fixer les adresses des entres/sorties. Ici, les
entres analogiques intgres la CPU ont les adresses %EW64 %EW66 et les sorties
numriques intgres les adresses %E0.0 %E1.3. Ladresse de la sortie analogique sur le Signal
Board est AW80 ( Device overview (Vue d'ensemble des appareils) AO1 x 12 bits 8081)
Industry Sector, IA&DT
Documentation de formation SCE Page 37 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
7. Afin que le logiciel puisse accder par la suite la bonne CPU, il convient de paramtrer son
adresse IP et le masque de sous-rseau. ( Properties (Proprits) General (Gnral)
PROFINET Interface (PROFINET Interface) Ethernet Adresses (Ethernet Adresses) IP
address (Adresse IP) : 192.168.0.1 Subnet mask (Masque de sous-rseau) : 255.255.255.0)
Industry Sector, IA&DT
Documentation de formation SCE Page 38 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
8. Puisque de nos jours, on programme avec des variables plutt quavec des adresses absolues, on
doit spcifier ici les variables globales de lAPI.
Ces variables globales de l'API sont des noms descriptifs accompagns de commentaires qui
dfinissent chaque entre et sortie utilise dans le programme. Plus tard, pendant la programmation, on
pourra accder ces variables API globales via leurs noms.
Ces variables globales peuvent tre utilises partout dans le programme, dans tous les blocs.
Slectionner dans le navigateur du projet controller_tank (rgulation_citerne) [CPU1214C
DC/DC/DC] puis PLC tags (Variables API). Avec un double-clique, ouvrir la table PLC tags (Variables
API) et entrer, comme montr ci-dessous, les noms des entres et des sorties.
( controller_tank (rgulation_citerne) [CPU1214C DC/DC/DC] PLC tags (Variables API) Default
tag table (table des variables standards))
Industry Sector, IA&DT
Documentation de formation SCE Page 39 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
9. Pour crer le bloc de fonction FC1, slectionner dans le navigateur du projet controller_tank
(rgulation_citerne) [CPU 1214 C DC/DC/DC], puis Program blocks (Blocs de programme).
Double-cliquez ensuite sur Add new block (Ajouter nouveau bloc). ( controller_tank
(rgulation_citerne) [CPU1214C DC/DC/DC] Program blocks (Blocs de programme) Add new
block (Ajouter nouveau bloc))
Industry Sector, IA&DT
Documentation de formation SCE Page 40 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
10. Dans la fentre de slection, choisissez Organization block (Bloc dorganisation) (OB) et
slectionnez Cyclic interrupt. Comme langage de programmation, choisissez le logigramme FBD
(LOG). La numrotation est automatique (OB200). On laisse le temps de cycle 100 ms. Acceptez
les saisies avec OK. ( Organization block (Bloc dorganisation) (OB) Cyclic interrupt FBD
(LOG) Scan time (temps de cycle)100 OK)
Remarque :
Le rgulateur PID doit tre appel selon un temps de cycle fix (ici 100ms), puisque son traitement est
fortement dpendant du temps. Il serait impossible doptimiser le rgulateur sil ntait pas appel en
accord avec le cycle.
Industry Sector, IA&DT
Documentation de formation SCE Page 41 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
11. Le bloc dorganisation Cyclic_interrupt [OB200] s'affiche automatiquement. Avant de pouvoir
crire le programme, cependant, on doit dclarer les variables locales.
Pour ce type de bloc, un seul type de variable est utilis :
Type Dsignation Fonction Disponible dans
Donnes locales
temporaires
Temp
Variables utilises pour un
enregistrement temporaire des
rsultats intermdiaires. Les
donnes temporaires sont
conserves uniquement durant
un cycle.
Fonctions, blocs fonctionnels et blocs
d'organisation
12. Une seule variable locale est utilise dans notre exemple.
Temp :
w_fuell_tank1 Real Cette variable conserve la consigne pour Citerne1 comme valeur intermdiaire
Dans cet exemple, il est aussi important dutiliser le bon type de donnes REAL, sinon la variable ne
sera pas compatible par la suite avec le bloc du rgulateur PID qu'on utilisera.
Pour plus de clart, toutes les variables locales sont accompagnes de commentaires explicatifs.
Industry Sector, IA&DT
Documentation de formation SCE Page 42 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
13. Une fois que les variables locales sont dclares, le programme peut tre saisi avec mention des
noms des variables. (Les variables sont dsignes par le symbole #.) Ici, dans les deux premiers
rseaux, lun ou lautre des deux nombres virgule flottante 0.0 (S1==0) et 700.0 (S1==1) est copi
dans la variable locale #w_level_tank1 grce une instruction MOVE ( Instruction Dplacer
MOVE)
Industry Sector, IA&DT
Documentation de formation SCE Page 43 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
14. Le bloc rgulateur PID_Compact est plac dans le 3me rseau. Puisque le bloc ne peut pas tre
appel en multi-instance, un bloc de donnes dinstance distinct doit lui tre affect. Il est gnr
automatiquement par STEP7.
( Extended instructions (Instructions avances) PID PID_Compact OK)
Industry Sector, IA&DT
Documentation de formation SCE Page 44 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
15. Maintenant, comme montr ci-dessous, connectez ce bloc la consigne (variable locale
#w_level_tank1), la valeur relle (variable globale X_level_tank1) et la variable de rglage
(variable globale Y_level_tank1). Ouvrez ensuite l'cran de configuration pour configurer le bloc
de rgulation. ( #w_level_tank1 X_level_Tank1 Y_level_Tank1 )
Industry Sector, IA&DT
Documentation de formation SCE Page 45 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
16. Ici, on a accs aux Paramtres de base tels que le type de rgulation et les paramtres de
structure interne du rgulateur. ( Basic settings (Paramtres de base) Controller type (Type de
rgulation) Volume l Inpout (Entre) : Input_PER(analog) Output (Sortie) : Output_PER)
Industry Sector, IA&DT
Documentation de formation SCE Page 46 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
17. Dans les Process value settings (Paramtres de process), on dfinit une plage de mesure
comprise entre 0 litre et 1 000 litres. Les limites doivent aussi tre modifies. ( Process value
settings (Paramtres de process) Scaled high process value (Valeur de process suprieure)
1000.0 l Process value high limit (Limite suprieure) 1000.0 l Process value low limit (Limite
infrieure) 0.0 l Scaled low process value (Valeur de process infrieure) 0.0 l)
Industry Sector, IA&DT
Documentation de formation SCE Page 47 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
18. Dans les Advanced settings (Paramtres avancs), vous pourrez trouver, par exemple, la saisie
manuelle des PID Parameters (Paramtres PID). Cliquer ensuite sur pour fermer la fentre
de configuration et obtenir un programme termin avec correcteur PID. ( Advanced settings
(Paramtres avancs) PID Parameters (Paramtres PID )
Programme dans le logigramme (LOG) :
Industry Sector, IA&DT
Documentation de formation SCE Page 48 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
Programme dans le schma contacts (CONT) :
Industry Sector, IA&DT
Documentation de formation SCE Page 49 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
19. Cliquer sur pour enregistrer le projet. Pour charger le programme entier dans la
CPU, slectionner le dossier controller_tank (rgulation_citerne), puis cliquer sur l'icne
Download to device (Charger dans l'appareil).
( controller_tank (rgulation_citerne) )
Industry Sector, IA&DT
Documentation de formation SCE Page 50 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
20. Une fentre permettant le paramtrage a posteriori de l'interface PG/PC (en cas d'oubli) s'affiche.
Voir module M1, chapitre 4. ( Interface PG/PC pour procdure de chargement Charger)
Industry Sector, IA&DT
Documentation de formation SCE Page 51 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
21. Cliquez nouveau sur Load (Charger). Pendant le chargement, l'tat de progression est affich
dans la fentre. ( Load (Charger))
22. Si le chargement s'est correctement droul, le rsultat s'affiche dans une nouvelle fentre. Cliquez
ensuite sur Finish (Terminer). ( Finish (Terminer))
Industry Sector, IA&DT
Documentation de formation SCE Page 52 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
23. Dmarrer la CPU en cliquant sur l'icne . ( )
24. Confirmez que vous voulez vraiment dmarrer la CPU en cliquant sur OK. ( OK)
Industry Sector, IA&DT
Documentation de formation SCE Page 53 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
25. Cliquer sur l'icne Activer/dsactiver visualisation du programme. Cette commande permet de
surveiller l'tat des blocs et des variables pendant le test du programme.
Au premier dmarrage de la CPU, le rgulateur PID_Compact n'est pas encore activ. Pour
lactiver, on commence par cliquer sur licne de mise en service. ( Cyclic interrupt[OB200]
PID_Compact Mise en service)
Industry Sector, IA&DT
Documentation de formation SCE Page 54 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
26. Avec Measurement Start/Stop (Mesure marche/arrt), la consigne, la valeur relle et la variable
de rglage peuvent tre affiches sur un cran de commande.
Quand le rgulateur est charg pour la premire fois dans l'API, il nest pas encore actif. Cela
signifie que la variable de rglage reste 0 %. Slectionner Tuning mode Pretuning
(Autorglage la premire mise en route) puis Pretuning Start (Dmarrage de l'autorglage).
( Measurement Start/Stop (Mesure marche/arrt) Tuning mode Pretuning (Autorglage la
premire mise en route) Pretuning Start (Dmarrage de l'autorglage)
Industry Sector, IA&DT
Documentation de formation SCE Page 55 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
27. Lautorglage dmarre. Dans le champ Tuning status (Etat), les tapes en cours et les erreurs
rencontres sont affiches. La barre de progression illustre les tapes en cours de progression.
Industry Sector, IA&DT
Documentation de formation SCE Page 56 /56 Utilisation exclusivement rserve
Module 010-060 TIA Portal, dition 09/2012 aux instituts publics de formation et de R&D
SCE_FR _010-060_R1209_Asservissement en boucle ferme avec SIMATIC S7-1200 illimit / Siemens AG 2012. All Rights Reserved
28. Si lautorglage sest droul sans erreurs, les paramtres du PID sont optimiss. Le rgulateur
PID passe en mode automatique et utilise les paramtres optimiss. Les paramtres PID optimiss
sont conservs lors d'une mise sous tension et d'un redmarrage de la CPU. Grce au bouton ,
vous pouvez charger ces paramtres dans le projet. ( )
Remarque :
Pour des process plus rapides, par exemple un asservissement de vitesse, il convient de choisir fine
tuning (Autorglage au point de fonctionnement) pour l'optimisation. Dans ce cas, tous les
paramtres du PID sont dtermins et fixs dans un cycle de plusieurs minutes.
Aprs avoir t charges dans le projet, les valeurs des paramtres peuvent tre contrles dans le
bloc de donnes.
Vous aimerez peut-être aussi
- Livret 2 - Dossier validation VAE - Responsable de travaux Réseaux télécoms Très Haut Débit: 2023, #62D'EverandLivret 2 - Dossier validation VAE - Responsable de travaux Réseaux télécoms Très Haut Débit: 2023, #62Pas encore d'évaluation
- SCE FR 010-050 R1209 S7-1200 AnalogwerteDocument34 pagesSCE FR 010-050 R1209 S7-1200 Analogwertekaies02Pas encore d'évaluation
- PLC SimDocument15 pagesPLC SimМхамед Аит АбдерахманPas encore d'évaluation
- 03 1200 Bloc Temporisations IEC Et Compteurs IEC Pour SIMATIC S7-1200Document52 pages03 1200 Bloc Temporisations IEC Et Compteurs IEC Pour SIMATIC S7-1200Abdelhalim ZAOUIPas encore d'évaluation
- Formation de Base API Siemens PDFDocument49 pagesFormation de Base API Siemens PDFJennifer McgeePas encore d'évaluation
- SCE - FR - 011-100 Unspecific Hardware Configuration S7-1200 - R1504Document44 pagesSCE - FR - 011-100 Unspecific Hardware Configuration S7-1200 - R1504Hajar MobhidPas encore d'évaluation
- Sce 031 410 Basics Diagnostics s7 1200 r1709 FR PDFDocument38 pagesSce 031 410 Basics Diagnostics s7 1200 r1709 FR PDFYassine LakhalPas encore d'évaluation
- 05 1200 Traitement de Valeurs Analogiques Sur SIMATIC S7-1200Document35 pages05 1200 Traitement de Valeurs Analogiques Sur SIMATIC S7-1200Claudy CompaniePas encore d'évaluation
- Automates Programmables PDFDocument774 pagesAutomates Programmables PDFAnis Yacine BoukrifPas encore d'évaluation
- Sce 051 201 SCL s7 1200 r1709 FRDocument39 pagesSce 051 201 SCL s7 1200 r1709 FRAbdelhalim ZAOUIPas encore d'évaluation
- 07 1200 Communication Entre Deux SIMATIC S7-1200 Via ISO PDFDocument37 pages07 1200 Communication Entre Deux SIMATIC S7-1200 Via ISO PDFHamadi Ben Sassi100% (1)
- Support TIA PORTAL s7-1200Document133 pagesSupport TIA PORTAL s7-1200Fitouri Achref100% (1)
- Sce 012 110 Hardware Configuration s7 1500 Cpu 1512sp F 1 PN r1803 FR PDFDocument73 pagesSce 012 110 Hardware Configuration s7 1500 Cpu 1512sp F 1 PN r1803 FR PDFEsaie NkouandouPas encore d'évaluation
- SCE FR 010-010 R1209 Startup S7-1200Document63 pagesSCE FR 010-010 R1209 Startup S7-1200Yassine GTPas encore d'évaluation
- 01 1200 Initiation À La Programme Du SIMATIC S7-1200Document58 pages01 1200 Initiation À La Programme Du SIMATIC S7-1200Anas BlalPas encore d'évaluation
- Tia 2Document53 pagesTia 2Jean Claude KonanPas encore d'évaluation
- SCE FR 010-030 R1209 S7-1200 Zeiten ZählerDocument54 pagesSCE FR 010-030 R1209 S7-1200 Zeiten ZählerjjsbajbsbjjbsPas encore d'évaluation
- TIA Formation CPU 315-2DPDocument23 pagesTIA Formation CPU 315-2DPМхамед Аит АбдерахманPas encore d'évaluation
- Step 7 - DiagnoseDocument18 pagesStep 7 - DiagnoseМхамед Аит Абдерахман100% (1)
- Régulation Par Step 7Document64 pagesRégulation Par Step 7Мхамед Аит Абдерахман100% (3)
- Iec 61131-3Document80 pagesIec 61131-3niad770% (1)
- s71500 Communication Function Manual FR-FR FR-FRDocument370 pagess71500 Communication Function Manual FR-FR FR-FRadamsPas encore d'évaluation
- Programmation de La CPU 314C-2DPDocument25 pagesProgrammation de La CPU 314C-2DPYoussef BadreddinePas encore d'évaluation
- Document1TPautoTS22012 PDFDocument42 pagesDocument1TPautoTS22012 PDFfadacenglinPas encore d'évaluation
- Step 7 BlocsDocument29 pagesStep 7 Blocssamka0878Pas encore d'évaluation
- Automatismes Industriels 2 Eme Annee Gen PDFDocument47 pagesAutomatismes Industriels 2 Eme Annee Gen PDFAmmar BahijPas encore d'évaluation
- 892 Programmer Sous Unity m340Document29 pages892 Programmer Sous Unity m340Med GuerPas encore d'évaluation
- API Siemens Step7Document125 pagesAPI Siemens Step7Elmokh LassaadPas encore d'évaluation
- Tuto TIA PORTAL FRDocument25 pagesTuto TIA PORTAL FRClalisus ClaudiuPas encore d'évaluation
- CTIA06 - Programmation Des Automates S7-300 - Les Blocs D'organisation (OB) PDFDocument9 pagesCTIA06 - Programmation Des Automates S7-300 - Les Blocs D'organisation (OB) PDFErwanDouguetPas encore d'évaluation
- Cours Autom LPAIIDocument65 pagesCours Autom LPAIIElmokh LassaadPas encore d'évaluation
- PG - PC Et Configuration Des Interfaces PG - PC Sous Step7 SiemensDocument27 pagesPG - PC Et Configuration Des Interfaces PG - PC Sous Step7 SiemensOussama ObPas encore d'évaluation
- TP de Prise en Main Du S7-1200Document36 pagesTP de Prise en Main Du S7-1200Мхамед Аит АбдерахманPas encore d'évaluation
- Le But de La Régulation D'un Système AutomatiséDocument18 pagesLe But de La Régulation D'un Système AutomatisékaimissPas encore d'évaluation
- Securite Par Automate Programmable Ns224Document0 pageSecurite Par Automate Programmable Ns224saospiePas encore d'évaluation
- PLC Siemens-SIMATIC S7 - N1 - BenzeganeDocument3 pagesPLC Siemens-SIMATIC S7 - N1 - BenzeganeKheggar SamirPas encore d'évaluation
- Hmi Wincc v6 0 Basic Manual FRDocument354 pagesHmi Wincc v6 0 Basic Manual FRsnoop13120100% (1)
- Manual Collection SIMOCODE Pro 2018-11 FRDocument1 215 pagesManual Collection SIMOCODE Pro 2018-11 FRHaddou100% (1)
- Cours Step7Document49 pagesCours Step7Dawn Light0% (1)
- Formation s7 1500Document49 pagesFormation s7 1500saidPas encore d'évaluation
- Cours RLIDocument174 pagesCours RLIMohamed Ayed100% (1)
- SiMatic sTEP7Document236 pagesSiMatic sTEP7أسامة الدعمي100% (1)
- s7 400Document516 pagess7 400calidadPas encore d'évaluation
- Document1TPautoTS22012 PDFDocument42 pagesDocument1TPautoTS22012 PDFAYOUBPas encore d'évaluation
- Step7 7Document60 pagesStep7 7Imane BenidderPas encore d'évaluation
- 04-Stockage Des Donné Dans Les Bloc de DonnéeDocument16 pages04-Stockage Des Donné Dans Les Bloc de DonnéeRafik AgouniPas encore d'évaluation
- Programme Formation en Ligne Tia Portal SiemensDocument2 pagesProgramme Formation en Ligne Tia Portal SiemensMehdi Naani0% (1)
- Pupitres Simatic Hmi 1356968712Document34 pagesPupitres Simatic Hmi 1356968712SihamaSihamPas encore d'évaluation
- SCE FR 010-050 R1209 S7-1200 AnalogwerteDocument34 pagesSCE FR 010-050 R1209 S7-1200 AnalogwerteYassine GTPas encore d'évaluation
- Sce 062 121 Servo s210 PN Irt To s71500 r2008 FRDocument91 pagesSce 062 121 Servo s210 PN Irt To s71500 r2008 FRFoaadPas encore d'évaluation
- Sce 011 100 Unspecific Hardware Configuration s7 1200 r1709 FRDocument46 pagesSce 011 100 Unspecific Hardware Configuration s7 1200 r1709 FRservice électricité bâtimentPas encore d'évaluation
- Sce 102 101 Rfid Sensor rf210r Io Link Et200sp s7 1500 r1901 FRDocument63 pagesSce 102 101 Rfid Sensor rf210r Io Link Et200sp s7 1500 r1901 FRNoureddine BaPas encore d'évaluation
- Sce 032 600 Global Data Blocks s7 1500 r1703 FRDocument42 pagesSce 032 600 Global Data Blocks s7 1500 r1703 FRmohamed EddaoudyPas encore d'évaluation
- Sce 062 101 Frequency Converter g120 PN s7 1500 r1909 FRDocument77 pagesSce 062 101 Frequency Converter g120 PN s7 1500 r1909 FRfgdPas encore d'évaluation
- s71200 Easy Book FR-FRDocument133 pagess71200 Easy Book FR-FRaissaPas encore d'évaluation
- Katalog Sitrain V20Document23 pagesKatalog Sitrain V20chokamPas encore d'évaluation
- CP S7 Pour Industrial EthernetDocument320 pagesCP S7 Pour Industrial EthernetFares ZerariPas encore d'évaluation
- s71200 System Manual FR-FR FR-FRDocument848 pagess71200 System Manual FR-FR FR-FRmec83100% (1)
- Initiation - La Programmation d'API Avec STEP 7Document48 pagesInitiation - La Programmation d'API Avec STEP 7Houssine Zaïmi33% (3)
- Sce 031 100 FC Programming s7 1200 r1709 FRDocument54 pagesSce 031 100 FC Programming s7 1200 r1709 FRMariamsk SkhiriPas encore d'évaluation
- TC-Maths-16 Probabilité D200429Document23 pagesTC-Maths-16 Probabilité D200429Hamed Traore100% (1)
- Lien Math ReperageDocument8 pagesLien Math ReperageErica Nomenjanahary PrincyPas encore d'évaluation
- Bourcier Danièle. Argumentation Et Définition en Droit. in Langages, 10e Année, N°42, 1976. Pp. 115-124.Document11 pagesBourcier Danièle. Argumentation Et Définition en Droit. in Langages, 10e Année, N°42, 1976. Pp. 115-124.nestored1974Pas encore d'évaluation
- polyDTS PDFDocument13 pagespolyDTS PDFlamis ramdane100% (1)
- Modelisation de Reseaux Plans DAntennes Microrubans Par Des Circuits EquivalentsDocument6 pagesModelisation de Reseaux Plans DAntennes Microrubans Par Des Circuits EquivalentsMéd El YazidPas encore d'évaluation
- Corrigé Des Ex - Produit Scalaire - 8OVpeotFSS2ZsARSspRsDocument6 pagesCorrigé Des Ex - Produit Scalaire - 8OVpeotFSS2ZsARSspRsdemba baPas encore d'évaluation
- Chapitre IVDocument16 pagesChapitre IVdz filmPas encore d'évaluation
- MMC Cours 04Document74 pagesMMC Cours 04Redouane RedaPas encore d'évaluation
- TP MétrologieDocument9 pagesTP MétrologieNisrine DaoukiPas encore d'évaluation
- Adjectifspossessifs (Accord) 1692183235525Document5 pagesAdjectifspossessifs (Accord) 1692183235525toniipouna257Pas encore d'évaluation
- TP ArduinoDocument22 pagesTP ArduinokamalPas encore d'évaluation
- DJEBBAR CV Abrégé (F) 2009 2Document3 pagesDJEBBAR CV Abrégé (F) 2009 2kehihaPas encore d'évaluation
- 1erea Sujets Sequentiels (Seq1 À Seq 5) Et ProbA de 1999 À 2017Document113 pages1erea Sujets Sequentiels (Seq1 À Seq 5) Et ProbA de 1999 À 2017JOEL LOICPas encore d'évaluation
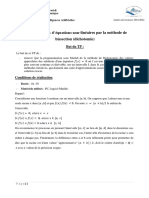
- TP 2 Résolution D'équations Non-Linéaires Par La Méthode de Bissection (Dichotomie)Document5 pagesTP 2 Résolution D'équations Non-Linéaires Par La Méthode de Bissection (Dichotomie)khalilkPas encore d'évaluation
- TP 2 Les PointeursDocument2 pagesTP 2 Les PointeursYoussefxoPas encore d'évaluation
- TD Delectricite 1Document5 pagesTD Delectricite 1Ursule Yaméogo100% (1)
- Algorithmique Les TableauxDocument44 pagesAlgorithmique Les TableauxJules MarenaPas encore d'évaluation
- La Dynamque UrbaineDocument271 pagesLa Dynamque UrbaineKhadijaAhouzi100% (1)
- TD Serie NumDocument2 pagesTD Serie Numsafe selmiPas encore d'évaluation
- Kouider COLORATION DE GRAPHES MIXTESDocument11 pagesKouider COLORATION DE GRAPHES MIXTESbaazizPas encore d'évaluation
- 2019 Metro Exo2 Correction Fusee 6ptsDocument2 pages2019 Metro Exo2 Correction Fusee 6ptsAdlène BeddiarPas encore d'évaluation
- Exercice de Statistique Série A2Document2 pagesExercice de Statistique Série A2Djè Alain-CharlesPas encore d'évaluation
- PolDocument248 pagesPoltarif ashtarPas encore d'évaluation
- Modélisation Du RisqueDocument11 pagesModélisation Du RisqueAziz AzouzPas encore d'évaluation
- Exercices Sur La Fiabilite PDFDocument5 pagesExercices Sur La Fiabilite PDFSaâd Eddine Atif0% (2)
- Méthode de Resolution de ProblèmeDocument23 pagesMéthode de Resolution de ProblèmeBirba RichardPas encore d'évaluation
- 03 - Cours APC Maths 4emeDocument225 pages03 - Cours APC Maths 4emeInfo Service100% (7)
- DL1 SolDocument5 pagesDL1 Solmehdi benmassoudPas encore d'évaluation
- Composition de Physique - Énoncé - 2019Document24 pagesComposition de Physique - Énoncé - 2019YouPas encore d'évaluation
- Rapport AdDocument17 pagesRapport AdMedi TajmouatiPas encore d'évaluation