Académique Documents
Professionnel Documents
Culture Documents
Domalain 2008 - Revue Staps PDF
Transféré par
Mathieu DomalainTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Domalain 2008 - Revue Staps PDF
Transféré par
Mathieu DomalainDroits d'auteur :
Formats disponibles
Cet article est disponible en ligne ladresse :
http://www.cairn.info/article.php?ID_REVUE=STA&ID_NUMPUBLIE=STA_081&ID_ARTICLE=STA_081_0007
Modlisation biomcanique de la main: influence des caractristiques de
lobjet sur la distribution des tensions des tendons lors dune tche de
par Mathieu DOMALAIN, Laurent VIGOUROUX et ric BERTON
| De Boeck Universit | Staps
2008/3 - N 81
ISSN 0247-106X | ISBN 2-8041-5779-1 | pages 7 22
Pour citer cet article :
Domalain M., Vigouroux L. et Berton n, Modlisation biomcanique de la main: influence des caractristiques de
lobjet sur la distribution des tensions des tendons lors dune tche de prhension. (Prix Jean-Claude Lyleire 2007),
Staps 2008/3, N 81, p. 7-22.
Distribution lectronique Cairn pour De Boeck Universit.
De Boeck Universit. Tous droits rservs pour tous pays.
La reproduction ou reprsentation de cet article, notamment par photocopie, n'est autorise que dans les limites des
conditions gnrales d'utilisation du site ou, le cas chant, des conditions gnrales de la licence souscrite par votre
tablissement. Toute autre reproduction ou reprsentation, en tout ou partie, sous quelque forme et de quelque manire
que ce soit, est interdite sauf accord pralable et crit de l'diteur, en dehors des cas prvus par la lgislation en vigueur
en France. Il est prcis que son stockage dans une base de donnes est galement interdit.
Modlisation biomcanique de la main :
influence des caractristiques de lobjet
sur la distribution des tensions des
tendons lors dune tche de prhension
(Prix Jean-Claude Lyleire 2007)
Mathieu DOMALAIN,
Laurent VIGOUROUX, ric BERTON
Institut des Sciences du Mouvement
UMR 6233
Universit Aix-Marseille
Facult des Sciences du Sport
163, Avenue de Luminy
13288 Marseille cedex 09, France
Tl. : (+33) 4 91 17 04 78
mathieu.domalain@univmed.fr
RSUM : Afin de tenir un objet en main il est possible dadopter une infinit de coordinations articulaires
et musculaires. Lobjectif de cette tude tait de dfinir linfluence des caractristiques de lobjet (taille
et masse) lors dune tche de prhension sur lorganisation du systme musculo-squelettique. Afin de
dterminer les forces exerces dans les tendons des 7 muscles mobilisant lindex, une modlisation bio-
mcanique a t dveloppe. Le problme mathmatique sous-dtermin caus par la redondance mus-
culaire est lev au moyen dune procdure doptimisation contrainte par lectromyographie (EMG).
La tche consistait, pour les 9 participants, maintenir entre le pouce et lindex des objets dont la taille et
la masse variaient respectivement entre 3,5 et 9,5 cm et 0,75 et 2,25 kg. Les rsultats montrent que la force
de prhension exerce pour tenir lobjet est fonction de la masse mais, ce qui est plus surprenant, augmente
galement avec la taille de lobjet. Malgr les diffrentes postures de doigts et les diffrentes activits EMG,
les ratios tensions des muscles flchisseurs/force externe restent constants quelles que soient les conditions
de taille et de masse. Ce rsultat nous fait mettre lhypothse dune stratgie de contrle de la redondance
et laisse penser que les sujets adapteraient la posture et les tensions des muscles antagonistes pour mainte-
nir ce ratio constant. Les rsultats obtenus permettent dapercevoir des applications potentielles en termes
de sant et dergonomie. Notamment, la taille optimale permettant de tenir un objet avec le minimum de
force (externe et musculaire) est infrieure la taille permettant dexercer une force maximale.
MOTS-CLS : Modlisation biomcanique, main, tche de saisie, caractristiques de lobjet, redondance musculaire.
ABSTRACT: Grasping an object for a precision task can be achieved with an amount of joints and muscles
configuration that the Central Nervous System has to coordinate. Therefore, this works aimed at studying
how an object size and weight can affect this musculoskeletal organization. A 3D biomechanical modeling
was used to determine the forces exerted in the seven muscles tendons of the index finger. The indeter-
minate problem caused by redundancy was solved with the combination of both optimization technique
and electromyography of an antagonist muscle.
Data were analyzed from nine participants who performed isometric grasping tasks between the thumb
and index of objects ranging from 3.5 cm to 9.5 cm and 0.750 to 2.25 kg.
The results show that both grip forces and flexor tendons forces increase with object weight and size,
but ratio of flexor tension on force output remained constant. The joints configuration does not depend
of weight and ratio of antagonist muscle EDC activity in respect to the force output decrease.
These results indicate that a control strategy based on the ratio describe above may exists. Ergonomic
considerations are also discussed concerning optimal width in relation of specific goals.
KEY WORDS: biomechanical modelling, hand, precision grip, object characteristics, muscle redundancy.
MATHIEU DOMALAIN LAURENT VIGOUROUX RIC BERTON
Mathieu Domalain Laurent Vigouroux ric Berton 8
1. INTRODUCTION
De nombreuses activits sportives, profes-
sionnelles et mme de la vie courante, nces-
sitent la manipulation d objets . La main est
donc une partie essentielle du corps humain.
Dun point de vue mcanique, elle est compo-
se de 26 degrs de libert mobiliss par 39
muscles. Elle reprsente une illustration par-
faite de la redondance du systme musculo-
squelettique qui est identifiable aux niveaux
articulaire et musculaire (Bernstein, 1967).
Au niveau articulaire, les multiples degrs de
libert rsultent en une infinit de combinai-
sons possibles pour raliser une mme tche.
De mme au niveau musculaire, lensemble
complexe de muscles extrinsques et intrin-
sques de la main mobilise les articulations
traduisant, l encore, une multitude de
combinaisons potentielles de forces muscu-
laires agonistes et antagonistes pour effectuer
un mouvement ou mme simplement exercer
une force. La main est donc un systme mus-
culo-squelettique particulirement complexe
que le systme nerveux central (SNC) contrle
de manire remarquable. Malheureusement,
elle est lorigine de frquentes lsions et de
multiples troubles musculo-squelettiques (TMS).
Afin de comprendre ces mcanismes lsion-
nels et damliorer la rhabilitation, les mde-
cins et les ergonomes sont particulirement
demandeurs dinformation concernant le fonc-
tionnement biomcanique de la main et la
manire dont elle est contrle, en particulier
durant les tches de prhension.
La capacit de prhension de la main nces-
site dexercer un niveau de force qui soit la
fois suffisamment lev pour que lobjet ne
nous chappe pas des doigts et suffisamment
faible pour limiter leffet de fatigue ou les ris-
ques de blessure (Westling et Johansson, 1984).
ce jour, linfluence des caractristiques de
lobjet masse, friction, forme sur les forces
dveloppes lors dune tche de precision grip
1
est bien connue (Cadoret et Smith, 1996 ; Burs-
tedt et al., 1999 ; Jenmalm et al., 1997). Au con-
traire, les tudes portant sur leffet de la taille
de lobjet fournissent des conclusions contradic-
toires. Kinoshita et al. (1996) rapportent que,
quel que soit le poids du cylindre (de 0,5
2 kg), la force exerce spontanment par les 5
doigts de la main est plus faible pour un diam-
tre de 7,5 cm que pour des diamtres de 5 et
10 cm (traduisant ainsi une courbe en U). Jor-
dan et al. (2005) rapportent au contraire que,
pour une mme masse, la force exerce crot
mesure que la taille de lobjet augmente. Leur
protocole consistait maintenir entre 2 et 3
doigts (le pouce et lindex et le majeur) des
objets de tailles et de masses diffrentes (de 1
9 cm et de 0,065 0,260 kg). Les masses utili-
ses dans ltude de Kinoshita et al. (1996) sont
dix fois plus leves que celles de Jordan et al.
(2005), ce qui pourrait tre une explication
ces relations diffrentes au mme titre que le
nombre et la posture des doigts mis en jeux.
Jordan et al. (2005) ont mis lhypothse
selon laquelle llvation de la force exerce
serait due une augmentation des forces passi-
ves mises en jeu avec lcartement de la pince.
Les deux facteurs passifs seraient ltirement de
larticulation MtaCarpo-Phalangienne (MCP)
(capsule articulaire, peau et ligaments) ainsi que
ltirement des muscles flchisseurs. Cepen-
dant, cette hypothse reste invrifie car
aucune tude quantifiant les postures articulai-
res et donc ltirement des structures na t
ralise ce jour lors de ce type de prhension.
De plus, aucune de ces tudes nanalyse
linfluence de la taille de lobjet sur la faon
1. Le terme anglo-saxon de precision grip qualifie les tches mobilisant deux doigts ou plus, qui ncessitent un contrle fin de la motricit.
Il sagit de protocoles durant lesquels un objet est tenu de manire spontane lors dun exercice sous-maximal. Il est mettre en opposition
avec le power grip, le serrage maximal dun objet situ au creux de la paume.
9 Modlisation biomcanique de la main
dont la force externe est rpercute sur le sys-
tme musculo-squelettique, en particulier sur
les forces exerces au niveau des tendons des
muscles (Valero-Cuevas, 2003 ; Kursa et al.,
2005 ; Vigouroux et al., 2007). Les mesures
directes invasives de la tension de tous les ten-
dons tant impossibles, il savre ncessaire de
dvelopper une modlisation biomcanique
pour accder une estimation de ces variables.
En effet, la modlisation biomcanique requiert
uniquement les mesures non invasives de la
force externe exerce sur lobjet et de la cin-
matique adopte. Ensuite, une procdure
doptimisation est utilise pour dterminer les
tensions musculaires optimales qui minimi-
sent ou maximisent une fonction mathmatique
sense reprsenter le patron de distribution
adopt par le SNC (Rasmussen et al., 2001). De
plus, en contraignant la procdure doptimisa-
tion tenir compte de llectromyographie
(EMG) de muscles antagonistes, des rsultats
particulirement intressants peuvent tre obte-
nus (Amarantini et Martin, 2004 ; Vigouroux
et al., 2007).
Ainsi, lobjectif de ltude tait, dans un pre-
mier temps, de dfinir linfluence des caract-
ristiques (taille et masse) de lobjet lors dune
tche de prhension sur la force spontane
exerce sur lobjet et sur la cinmatique adop-
te. Dans un second temps, une modlisation
biomcanique a t dveloppe afin de dter-
miner les tensions musculaires exerces. Une
configuration simple de pince type pouce/
index a t choisie comme exemple de prhen-
sion courante. Cette configuration est de plus
reconnue comme tant particulirement pour-
voyeuse de pathologies par rapport aux prises
utilisant la paume de la main. En raison dune
complexit anatomique et fonctionnelle sup-
rieure, la modlisation du pouce reste contro-
verse et est encore en cours de dveloppement.
Cest pourquoi, dans cette tude, sont reports
uniquement les rsultats lis lindex. Il est
noter que ceci nenlve pas dintrt notre
tude car, lors de la prhension pouce/index,
lindex peut tre considr comme le maillon
faible, le pouce ayant la capacit sopposer
aux quatre autres doigts dans dautres types de
prhension.
2. MTHODE
2.1. Sujets
Neuf sujets masculins dont les caractristi-
ques sont prsentes dans le tableau 1 ont par-
ticip cette tude. Ils taient tous droitiers et
exempts de toute pathologie au niveau de la
main et des muscles de lavant-bras.
Tableau 1. Caractristiques des sujets. La taille de la main tait mesure de la ligne de plissure
distale du poignet lextrmit du majeur
2.2. Dispositif
Les sujets taient confortablement assis sur
une chaise, le bras droit pos sur une table
(coude 80 de flexion), et la main en prona-
tion (figure 1). Le poignet se trouvait en
position neutre (0 de flexion/extension et 0
dadduction/abduction) et le pouce et lindex
taient libres de tout mouvement. Les sujets
avaient pour instruction de ne pas chercher
contrler les doigts majeur, annulaire et auri-
culaire et ces derniers ninterfreraient pas avec
la chane de mesure.
ge (ans) Taille (cm) Masse (kg) Taille de la main (cm)
26,0 5,2 180,1 6,4 72,3 5,4 19,6 1,2
Mathieu Domalain Laurent Vigouroux ric Berton 10
Figure 1. Positionnement du sujet lors de la tche
2.3. Tche
La tche consistait maintenir (isomtrie) un
objet horizontalement entre le pouce et lindex.
Le maintien durait 8 secondes, temps ncessaire
la stabilisation de la force. La consigne tait de
tenir lobjet naturellement, sans aucune con-
trainte de posture ou de force appliquer.
Quatre tailles taient testes : 3,5 - 5,5 - 7,5 et
9,5 cm. Ces tailles reprsentent ltendue des
tailles dobjets habituellement manipuls avec
cette configuration de pince et correspondent
celles proposes par Jordan et al. (2005). Un lest
tait suspendu au milieu de lobjet au moyen
dun cble souple. Trois conditions de masses
taient galement testes telles que lensemble
du dispositif (objet-capteur-lest) corresponde
aux masses de 0,750 kg, 1,500 kg et 2,250 kg.
Trois essais taient raliss par condition,
soit 36 essais au total par sujet. Lordre de pas-
sage des conditions tait randomis. Afin dvi-
ter tout phnomne de fatigue, 2 minutes de
rcupration taient donnes au sujet entre cha-
que changement de taille.
2.4. Systmes denregistrement et traitement
Dynamomtrie
Pour recueillir la force exerce entre le
pouce et lindex, lobjet tait instrument par
un capteur de force unidimensionnel (ELPM-
T1M 125N, ENTRAN). La frquence dacqui-
sition tait de 100 Hz, le signal tait filtr
(Butterworth ordre 4, passe-bas 6 Hz). Afin de
standardiser le coefficient de frottement, deux
disques de 8 mm recouverts dune surface gra-
nuleuse (papier de verre 80 grains/cm
2
) taient
disposs sur les points de contact entre lobjet et
les doigts.
Cinmatique
Lenregistrement des angles articulaires de
lindex et du pouce seffectuait au moyen dun
systme de capture de mouvement optolectro-
nique Vicon 624 (ViconMotion System, Lake
Forest, CA) 6 camras. Le signal tait chan-
tillonn 100 Hz et filtr (Butterworth ordre 4,
passe-bas 10 Hz). Chaque phalange tait mat-
rialise par 2 marqueurs rtro-rflchissants (dia-
mtre 4mm). Les marqueurs taient placs sur
11 Modlisation biomcanique de la main
Figure 2. Angles de flexion ( gauche) et angle dadduction/abduction ( droite).
Langle tel quillustr sur le schma reprsente labduction
la face dorsale du pouce, de lindex et de la
main (Sakai, 2005) ainsi que sur lobjet. Les
angles identifis sont les angles directs comme
dfinis par la Figure 2.
lectromyographie
Une EMG de surface correspondant au
muscle extensor digitorum communis (EDC) tait
recueillie laide dun systme Biopac (MP150
Biopac Systems Inc., Santa Barbara, California,
USA ; lectrodes bipolaires Ag/AgCl). Les lec-
trodes taient positionnes selon le placement
dcrit par Danion et al. (2002). Le signal tait
chantillonn 1000 Hz, amplifi (gain 5000)
et filtr (Butterworth ordre 4, bande passante
10-500 Hz).
Pour normaliser les signaux EMG, des
extensions et des flexions maximales taient
ralises dans les quatre tailles testes. La
valeur de rfrence pour la normalisation cor-
respondait alors lEMG maximale observe
dans chacune des largeurs. Pour analyser le
signal EMG, une Root Mean Square (RMS) a
t calcule.
Une estimation pralable de la tension du
muscle EDC partir de lEMG a t ralise en
utilisant la mthode suivante :
(1)
avec (2)
Dans cette quation reprsente la con-
trainte musculaire maximale admissible fixe
35N/cm
2
(Valero-Cuevas et al., 1998) et PCSA est
la section de coupe physiologique du muscle
extraite de Chao et al. (1989).
2.4 Analyse des donnes
Le traitement des donnes a t ralis
au moyen de scripts crits en langage Scilab
(INRIA) et Matlab (The MathWorks, Natick,
MA). En accord avec les travaux de Valero-
Cuevas et al. (1998), une fentre temporelle de
750 ms tait considre pour analyser les diff-
rents signaux. Cette fentre tait situe 75 %
du temps de lessai, moment o la force tait
stabilise. Dans cette fentre, la force moyenne
exerce sur lindex, la RMS de lEMG
EDC
ainsi
que les angles articulaires taient calculs.
t
EMG
EDC
e
EDC
max
PCSA
EDC
=
e
EDC
RMS
EDC
RMS
EDC
max
---------------------------- =
max
Mathieu Domalain Laurent Vigouroux ric Berton 12
Figure 3. Tendons des 7 muscles (voir tableau 2) mobilisant les 3 articulations de lindex.
DIP, larticulation interphalangienne distale, PIP, larticulation interphalangienne proximale
et MCP, larticulation mtacarpophalangienne.
2.5. Modlisation biomcanique du doigt
Os et articulations :
Lindex est modlis comme tant 4 seg-
ments rigides (phalanges et mtacarpes) mobi-
liss autour de 3 articulations. Larticulation
interphalangienne distale (DIP) et larticulation
interphalangienne proximale (PIP) possdent
chacune 1 degr de libert en flexion/exten-
sion. Larticulation mtacarpophalangienne
(MCP) possde un second degr de libert en
adduction/abduction. Les dimensions des os
sont calcules partir de la table anthropom-
trique de Buchholz (1992), base sur la taille de
la main.
Muscles :
Les trois articulations sont mobilises par
sept muscles illustrs Figure 3 et dont laction
est prsente dans le Tableau 2.
Mcanisme extenseur du doigt :
Le mcanisme extenseur du doigt est un
filet tendineux englobant la partie dorsale du
doigt et constitu de bandes tendineuses sur
lesquelles sinsrent les muscles intrinsques
de la main (LU, RI, UI) et les muscles EDC et
EI. Le mcanisme extenseur est modlis selon
les recommandations de Brook et al. (1995) et
Vigouroux et al. (2008).
Ligaments :
Les ligaments latraux interne (LLI) et
externe (LLE) de larticulation MCP ont t
modliss selon Sancho-Bru et al. (2001). La
tension cre dans ces ligaments est modlise
comme une relation non linaire quadratique
entre la force dveloppe par le ligament (t
lig
)
et son longation :
(3)
Tableau 2. Rcapitulatif des caractristiques des muscles mobilisant lindex
DIP, larticulation interphalangienne distale, PIP, larticulation interphalangienne proximale et MCP, larticulation mtacarpophalangienne.
t
lig
K l
lig
l
0
( )
2
=
Muscles extrinsques de la main Muscles intrinsques de la main
Muscles
Flexor
digitorum
profundus (FDP)
Flexor
digitorum superficia-
lis (FDS)
Extensor
digitorum
communis
(EDC)
Extensor
Indicis (EI)
lumbricale
(LU)
Radial
interosseous
(RI)
Ulnar
interosseous
(UI)
Actions
Flchisseur du
poignet, de MCP,
PIP et DIP
Flchisseur du
coude, du poignet,
de MCP et PIP
Extenseur de
DIP et PIP
Extenseur du
poignet, de
MCP, PIP et DIP
Flchisseurs de MCP et extenseurs de PIP
et DIP. LU et RI sont adducteurs de MCP,
alors que UI est abducteur
13 Modlisation biomcanique de la main
o K est la caractristique constante du liga-
ment (fixe 750N/cm
2
), l
lig
la longueur du
ligament et l
0
sa longueur initiale sans con-
trainte.
quilibre mcanique de lindex :
Lors de lapplication dune force externe, le
doigt est considr en quilibre mcanique sta-
tique. Le principe fondamental de la statique
sapplique donc ce systme :
(4)
Ladaptation de lquilibre des moments au
cas particulier du doigt signifie que les
moments de la force externe sont quilibrs
chaque degr de libert par les moments des
tendons et des ligaments. Cette quation peut
tre crite sous la forme matricielle suivante :
(5)
ou, en rsumant :
(6)
avec la matrice des vecteurs bras de levier
des tendons des muscles i chaque articulation
j (j = DIP, PIP, MCP). Les donnes anthropo-
mtriques de Chao et An (1978) ont t utilises
pour dterminer les bras de levier des tendons
au passage de chaque articulation. est le
vecteur contenant les normes des 7 tensions de
tendons inconnues, le vecteur contenant les
moments crs par les ligaments LLI et LLU,
le vecteur contenant les 4 moments de la
force externe.
Mthode de rsolution
Du fait de la redondance musculaire, lqua-
tion 5 comporte plus dinconnues (7 tensions de
tendons) que dquations (4 quations dquili-
bre des moments) et ne peut tre rsolue de
manire simple. Mathmatiquement, ce phno-
mne qualifi de sous-dtermin ncessite
lutilisation dune procdure doptimisation pour
trouver une solution. Dans note tude la proc-
dure consistait :
rechercher t
i
en minimisant la contrainte musculaire
maximale :
(7)
tout en respectant la contrainte dgalit sui-
vante :
0 M
0 F
O F
=
=
+
+
+
0
0
0
0
My
Mz
Mz
Mz
My My
Mz Mz
0
0
t
t
t
t
t
t
t
r r r r r r r
r r r r r r r
r r r r r r r
r r r r r r r
MCP Fexterne
MCP Fexterne
PIP Fexterne
DIP Fexterne
LLU LLI
LLU LLI
EI
EDC
UI
RI
LU
FDS
FDP
47 46 45 44 43 42 41
37 36 35 34 33 32 31
27 26 25 24 23 22 21
17 16 15 14 13 12 11
[ ] { } { } { } { } 0 M L T
& & & & &
= + + R
[ ] R
&
{ } T
&
{ } L
&
{ } M
&
min f t
i
( ) max
t
i
PCSA
i
----------------
=
[ ] { } { } { } { } 0 M L T
& & & & &
= + + R
Mathieu Domalain Laurent Vigouroux ric Berton 14
les contraintes dingalit suivante :
(8)
et la contrainte dingalit lie lestimation
EMG :
(9)
Cette procdure recherche la combinaison
des tensions des tendons qui rpond le mieux
au critre dit Minmax (q. 7) visant mini-
miser la tension du muscle prsentant le stress
maximal (Rasmussen, 2001). Des contraintes
dgalit et dingalit sont ajoutes afin dqui-
librer le systme (q. 6), tout en restant dans
des tensions physiologiquement ralistes (q. 8)
et en correspondant au mieux lEMG des
antagonistes (q. 9). Pour cela, le facteur de
pondration est fix zro au dpart de la
procdure de rsolution. Dans le cas o aucune
solution satisfaisante ne peut tre obtenue le
coefficient est incrment de 0,05 en 0,05
jusqu lobtention dune solution satisfaisante.
Cette marge de prcision est rendue ncessaire
par limprcision de lestimation des tensions
partir de lEMG. Grce cette procdure les
tensions des tendons sont estimes pour cha-
que essai ralis par les sujets.
2.6 .Traitement statistique
Les statistiques descriptives utilises sont des
moyennes et des carts-types (). Des analyses
de variance Anova deux facteurs et mesures
rptes ont t effectues afin de tester les
effets de la masse et de la taille. Le seuil de
significativit tait fix p <0,01. Des tests de
Newman-Keuls ont t utiliss pour lanalyse
post-hoc. Les rsultats prsents dans la partie
suivante correspondent aux moyennes ( cart-
type) de lensemble des sujets (n =9).
3. RSULTATS
Forces exerces sur lobjet
Les rsultats concernant les forces enregis-
tres par le capteur sont prsents dans la
figure 4.
Figure 4. Forces enregistre par le capteur durant la tche de maintien ( gauche) et durant la tche de force
maximale ( droite) en fonction de la taille de lobjet. En pointills, la condition 0,750 kg ;
en traits discontinus, la condition 1,5 kg et en trait continu, la condition 2,250 kg.
0 t
i
PCSA
max
t
EMG
EDC
( ) t
EMG
EDC
( ) t
EDC
t
EMG
EDC
( ) t
EMG
EDC
( ) +
15 Modlisation biomcanique de la main
Le graphique de gauche illustre la force
releve pendant la tche de maintien. Pour la
condition 2,25 kg, la force est en moyenne de
16,5 3,5 N pour la taille 3,5 cm, 20,0 3,7 N
pour la taille 5,5 cm, 21,8 3,2 N pour la
taille 7,5 cm et 28,0 5,6 N pour la taille
9,5 cm. Lanalyse Anova dmontre un effet de
la masse (F(
2,23
)=58,08 ; p < ,01), de la taille
(F(
3,69
)=42,51 ; p < ,01) ainsi quune interac-
tion entre les deux (F
(6,69
)=3,59 ; p <,01).
Le graphique de droite reprsente lampli-
tude de la force maximale enregistre lors de la
tche de flexion maximale en fonction de la taille.
La force maximale est en moyenne de 56,3 7,3
N en condition 3,5 cm, augmente 64,4 10,3 N
en condition 5,5 cm puis jusque 68,3 11,91 N
en condition 7,5 cm. La force maximale pour la
taille 9,5 cm est de 66,3 14,6 N. Leffet taille est
significatif (F
(3,24)
=4,57 ; p <,01).
Positions articulaires adoptes
Les tests statistiques dmontrent un effet
taille sur les angles de flexion de chaque arti-
culation. Au niveau de DIP, la flexion aug-
mente avec la taille (F
(3,72)
= 23,04 ; p < ,01)
alors que pour MCP la flexion diminue avec la
taille (F
(3,72)
= 51,4 3 ; p < ,01). Langle PIP
varie peu (variation infrieur 17,4 degrs) et
on ne relve aucun effet significatif. Aucun
effet de la masse nest observ pour ces trois
articulations, ce qui nous permet dillustrer
prcisment (angles rels) les 4 postures types
suivantes (figure 5) en fonction de la taille.
Figure 5. Postures types observes pour chacune des quatre tailles testes
Larticulation DIP est flchie en moyenne
13,8 15,9 degrs pour la condition taille
3,5 cm; 30,3 9,9 degrs pour la condition
taille 5,5 cm; 36,6 11,9 degrs pour la condi-
tion taille 7,5 cmet 38,3 9,5 degrs pour la
condition taille 9,5 cm (toutes masses confon-
dues). Larticulation PIP est flchie en moyenne
16,3 18,6 degrs pour la condition taille
3,5 cm; 5,4 16,8 degrs pour la condition
taille 5,5 cm; 11,8 17,5 degrs pour la condi-
tion taille 7,5 cm et 11,2 16,6 degrs pour la
condition taille 9,5 cm. Larticulation MCP est
flchie en moyenne 69,3 25,3 degrs pour la
condition taille 3,5 cm; 51,9 14,1 degrs pour
la condition taille 5,5 cm; 32,8 12,1 degrs
pour la condition taille 7,5 cmet 21,8 7,7
degrs pour la condition taille 9,5 cm.
La figure 6 illustre langle dadduction/
abduction au niveau de MCP. Elle montre que
larticulation passe den moyenne 2,6 2,3
degrs dabduction pour la taille 3,5 cm 15,2
1,3 degrs dadduction pour la taille 9,5 cm.
Cet effet taille est significatif (F
(3,72)
=51,43 ;
p <.01).
Mathieu Domalain Laurent Vigouroux ric Berton 16
Figure 6. Angle dadduction/abduction au niveau de MCP
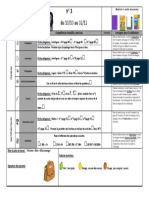
Tensions musculaires
Les rsultats des tensions estimes par le
modle sont prsents dans cette section. Les
muscles extrinsques de la main dabord (figu-
re 7), puis intrinsques ensuite (tableau 3).
Le premier graphique (figure 7) illustre la
tension exerce dans le muscle FDP. Pour la
condition 2,25 kg la tension est en moyenne de
28,7 13,5 N pour la taille 3,5 cm, 42,5 13,7
N pour la taille 5,5 cm, 48,3 16,2 N pour la
taille 7,5 cm et 47,5 12,8 N pour la taille
9,5 cm. Lanalyse Anova dmontre un effet de
la masse (F
(2,24)
= 22,31 ; p < ,01) et de la
taille (F
(3,72)
= 9,25 ; p < ,01). On observe les
mmes effets pour le muscle FDS : effet de la
masse (F
(2,24)
= 12,78 ; p < ,01) et de la taille
(F
(3,72)
= 5,43 ; p < ,01). Les ratios tensions de
FDP et tension de FDS/Force de prhension
sont constants (graphiques de droites). Ils sont
respectivement de 1,8 0,6 pour FDP et 1,9
0,8 pour FDS (en moyenne, toutes tailles et
toutes masses confondues).
Les quatre graphiques de la figure 7 illus-
trent les tensions dans les muscles extenseurs.
Pour EI, en condition 2,25 kg, la tension est
en moyenne de 42,7 30,2 N pour la taille
3,5 cm, 51,9 37,2 N pour la taille 5,5 cm,
41,4 25,4 N pour la taille 7,5 cm et 44,1
15,8 N pour la taille 9,5 cm. Lanalyse Anova
montre un effet de la masse (F
(2,24)
= 13,15 ;
p < ,01). En condition 2,25 kg, la tension
pour EDC est en moyenne de 27,5 7,9 N
pour la taille 3,5 cm, 28,8 11,5 N pour la
taille 5,5 cm, 24,0 7,8 N pour la taille 7,5 cm
et 26,5 1 3,1 N pour la taille 9,5 cm. Lana-
lyse Anova dmontre un effet de la masse
(F
(2,24)
= 44,83 ; p < ,01). Toutes conditions
de masse confondues, le ratio entre EDC et
force est en moyenne de 1,3 0,3 pour la
taille 3,5 cm, 1,1 0,4 pour la taille 5,5 cm,
0,9 0,3 pour la taille 7,5 cm et 0,8 0,3
pour la taille 9,5 cm. Lanalyse Anova dmon-
tre un effet de la taille (F
(3,72)
= 10,99 ;
p < ,01).
17 Modlisation biomcanique de la main
Figure 7. Tensions dans les muscles extrinsques flchisseurs puis extenseurs, gauche ; ratios tension/force, droite.
En pointills, la condition 0,750 kg ; en traits discontinus, la condition 1,5 kg et en trait continu, la condition 2,250 kg
Tableau 3. Tensions exerces dans les muscles intrinsques de la main (en Newton)
LU (lumbricale), RI (Radial interosseous) et UI (Ulnar interosseous).
Conditions
0 ,750 kg 1,5 kg 2,25 kg
3,5cm 5,5cm 7,5cm 9,5cm 3,5cm 5,5cm 7,5cm 9,5cm 3,5cm 5,5cm 7,5cm 9,5cm
Muscles
LU
0,9
(1,7)
0,3
(1,0)
0,4
(0,9)
0,1
(0,4)
1,9
(3,2)
1,0
(0,9)
0,4
(0,7)
0,2
(0,5)
2,1
(5,3)
2,4
(3,1)
1,4
(1,9)
0,2
(0,6)
UI
14,3
(11,9)
7,5
(9,2)
17,8
(14,1)
18,7
(11,7)
24,2
(25,5)
6,9
(9,1)
19,8
(18,8)
31,0
(23,9)
45,8
(40,8)
14,4
(21,0)
26,9
(18,4)
36,1
(25,1)
RI
10,05
(8,2)
11,9
(13,6)
6,24
(9,5)
4,31
(8,6)
23,77
(31)
28,78
(21,6)
20,96
(24,9)
7,90
(16,0)
44,64
(44,8)
68,45
(42,2)
24,12
(38,2)
25,19
(37,1)
Mathieu Domalain Laurent Vigouroux ric Berton 18
Le tableau 3 prsente les tensions exerces
dans les muscles intrinsques de la main. Les
tests statistiques dmontrent un effet de la
masse sur UI (F
(2,24)
=7,02 ; p <,01) et sur RI
(F
(2, 42)
=8,58 ; p <,01). Un effet taille est ga-
lement observ sur UI (F
(3,72)
=4.52 ; p <,01)
et sur RI (F
(3,72)
=5,23 ; p <,01).
4. DISCUSSION
Cette tude avait pour objectif danalyser
comment le systme musculo-squelettique
sorganise afin de sadapter aux caractristi-
ques de lobjet (i.e taille, masse) lors dune tche
de prhension.
Forces exerces sur le capteur
En accord avec Jordan et al. (2005), on
retrouve une augmentation de la force exerce
mesure que la taille augmente. Linteraction
rvle entre les variables taille et masse dmon-
tre quen plus, linfluence de la taille sur la force
de prhension diffre selon la masse considre :
plus la masse est importante, plus la taille de
lobjet influence la force exerce. Les rsultats
montrent galement que la force maximale
augmente jusqu la taille 7,5 cm puis semble
diminuer ensuite pour la taille 9,5 cm, ce qui
correspond au format de courbe observ lors
des tches de Power grip, cest--dire la prsence
dune taille optimale.
Positions angulaires
Les rsultats obtenus partir de la cinmati-
que montrent que, pour suivre laugmentation
de taille de lobjet, larticulation MCP stend
et que larticulation DIP flchit. En revanche,
la masse ninflue pas sur les angles de flexion
adopts par le sujet. Ce rsultat, coupl linte-
raction taille/poids sur la force exerce, semble
invalider lhypothse de Jordan et al. (2005)
selon laquelle laugmentation de la force serait
uniquement due la composante passive articu-
laire et musculaire. En effet, la raideur est une
composante intrinsque, cest--dire propre au
corps et indpendante des sollicitations exter-
nes (Mommersteeg et al., 1996). Elle est unique-
ment lie la posture qui, nous venons de le
dmontrer, nest pas influence par la masse.
Ds lors, son influence est identique quelle que
soit la masse considre. Le fait que la masse ait
une influence sur la relation taille/force tend donc
montrer que la raideur ne peut elle seule
expliquer laugmentation de force.
Tensions musculaires
Le contrle a posteriori de la mthode
employe montre que la contrainte dingalit
base sur lEMG
EDC
(q. 9) sest rvle tre
particulirement prcise car, chaque fois, il
existait une solution qui permettait de satisfaire
toutes les contraintes sans jamais avoir aug-
menter le coefficient de pondration de lEMG
( =0). Lestimation des tensions des tendons
ainsi que des ratios calculs correspond gale-
ment parfaitement aux ordres de grandeur habi-
tuellement observs (Dennerlein et al., 1998 ;
Valero-Cuevas, 2000). Ceci nous permet daccor-
der une bonne confiance dans les donnes esti-
mes.
Les rsultats montrent que, comme la force
externe, les tensions dans les deux principaux
flchisseurs que sont FDP et FDS augmentent
avec la taille de lobjet. Lorsque lon normalise
ces tensions par rapport la force externe, ce
ratio reste constant, et ce indpendamment des
conditions de taille et de masse (il est gal
environ 1,7 pour FDP et 1,9 pour FDS). Ainsi,
on peut mettre lhypothse que le SNC adap-
terait la posture ainsi que le niveau de co-activa-
tion des muscles antagonistes afin de maintenir
ces ratios constants. En effet, alors que la force
exerce sur lobjet augmente avec la taille,
les tensions de EDC et EI restent constantes.
Lexpression de la tension de EDC en fonction
de la force externe montre une nette diminu-
tion : le ratio passe denviron 1,3 en moyenne,
toutes masses confondues, pour la taille 3,5 cm
environ 0,8 en taille 9,5 cm. Le rapport cons-
tant tension des flchisseurs/force externe
pourrait donc tre rvlateur dune stratgie
de contrle ayant pour but de rsoudre les pro-
19 Modlisation biomcanique de la main
blmes de redondance articulaire et musculaire
ou de rguler la contrainte dans le systme
musculo-squelettique. Il conviendrait de regar-
der si une telle constance sobserve lors dautres
tches pour confirmer cette interprtation.
Les rsultats obtenus reprsentent une
source dinformation importante pour les clini-
ciens qui peuvent les rutiliser afin dadapter
les protocoles de chirurgie, les processus de
rhabilitation et de prvention. De plus, ces
rsultats permettent dapercevoir des applica-
tions potentielles en termes dergonomie. Selon
lobjectif du sujet, la taille optimale de lobjet
serait susceptible de varier. Si lobjectif est
dexercer une force de prhension maximale,
alors la taille 7,5 cm semble la plus indique.
Cette taille permet en effet une force externe
suprieure sans pour autant augmenter le ratio
des contraintes dans les muscles flchisseurs
(pas de rapport tension/force plus dfavorable).
En revanche, si lobjectif est de maintenir un
objet avec un minimum de force, alors la taille
optimale est 3,5 cm. Cette taille permet, pour
une masse donne, de minimiser la tension dans
les muscles flchisseurs (ainsi que dune manire
gnrale dans lensemble des muscles). Enfin,
si lobjectif est de tenir un objet en ayant le
meilleur rendement force externe/force interne,
alors la notion de taille optimale disparat puis-
que les sujets possdent le mme ratio dans tou-
tes les tailles. Cette interprtation nest toutefois
valable que pour lindex, les tensions muscu-
laires engendres dans le pouce ntant pas
estimes.
Certaines limitations sont prendre en con-
sidration dans cette tude. La premire limite
concerne lutilisation de donnes anthropo-
mtriques telles que la PCSA, la contrainte
musculaire maximale ainsi que les donnes de
longueurs des pices osseuses ou de raideur
des ligaments. La seconde est lie aux imprci-
sions de mesure telles que le placement des
marqueurs ainsi que la mesure de la taille de la
main et du bras de levier de la force externe sur
la dernire phalange. De plus, un capteur de
force unidimensionnel nenregistre pas la tota-
lit de la force et des moments exercs au bout
du doigt. Lutilisation dun capteur trois
dimensions permettrait de voir si ce biais ne
favorise pas une taille pas rapport une autre.
Enfin, il serait ncessaire dtendre cette tude
lanalyse des variables du pouce afin dobte-
nir un point de vue global sur la tche de pr-
hension.
5. CONCLUSION ET PERSPECTIVES
Notre tude avait pour objectif danalyser
comment le systme musculo-squelettique de la
main sorganise afin de sadapter aux contrain-
tes lies aux caractristiques de lobjet (taille,
masse) lors dune tche de prhension entre le
pouce et lindex. Lutilisation dune modlisa-
tion biomcanique de lindex couple une
procdure combinant optimisation et EMG a
permis la mise en vidence dadaptations la
fois articulaires et musculaires.
Lestimation des forces dans les tendons a
rvl la prsence dun ratio constant entre les
tensions des muscles flchisseurs et la force
externe quelles que soient la taille et la masse.
Avec plusieurs prcautions, ce rsultat pourrait
tmoigner de la prsence dune ventuelle stra-
tgie de contrle de la redondance musculaire
(la tension des antagonistes) et articulaire (la
posture adopte) base sur la constance de ce
critre. Les donnes de rpartition des tensions,
ainsi que les indications formules sur la rela-
tion taille optimale de lobjet en fonction du but
recherch, donnent des indications pour lergo-
nomie des outils de travail ainsi que les protoco-
les chirurgicaux de transferts tendineux. Des
recherches futures doivent tre entreprises
pour tendre ce niveau de modlisation
lensemble des doigts ainsi que pour ladapter
des situations dynamiques.
Remerciements :
Je tiens remercier MM. Laurent Vigouroux,
ric Berton et Frdric Danion pour leurs
conseils.
Mathieu Domalain Laurent Vigouroux ric Berton 20
6. RFRENCES BIBLIOGRAPHIQUES
AMARANTINI, D., MARTIN, L., 2004. A method to combine nu-
merical optimization and EMG data for the estima-
tion of joint moments under dynamic conditions.
Journal of Biomechanics 37, 1393-1404.
BERNSTEIN, N., 1967. The coordination and regulation of
movements. Oxford, Pergamon.
BROOK, N., MIZRAHI, J., SHOAM, M., DAYAN, J., 1995. A biome-
chanical model of index finger dynamics. Medical
Engineering & Physics 17, 54-63.
BROWN, S.H.M., POTVIN, J.R., 2005. Constraining spine sta-
bility levels in an optimization model leads to the pre-
diction of trunk muscle cocontraction and improved
spine compression force estimates. Journal of Biome-
chanics 38, 745-754.
BUCHHOLZ, B., 1992. Anthropometric data for describing
the kinematics of the human hand. Ergonomics 35,
261-273.
BURSTEDT MK, FLANAGAN JR, JOHANSSON RS. 1999. Control of
grasp stability in humans under different frictional
conditions during multidigit manipulation. Journal
of Neurophysiology 82, 2393-23405.
CADORET, G. & SMITH A. 1996. Friction, not texture, dictates
grip forces used during object manipulation. Journal
of Neurophysiology 75, 1963-1969.
CHAO, E.Y., AN, K.N., 1978. Graphical interpretation of the
solution to the redundant problem in biomechanics.
Journal of Biomechanics 100,159-167.
CHAO, E.Y., AN, K.N., COONEY, W.P., LINSCHEID, R.L., 1989. Bio-
mechanics of the hand. World scientific, Singapore.
DANION F., LI S., ZATSIORSKY V.M., LATASH M.L. 2002. Rela-
tions between surface EMG of extrinsic flexors and
individual finger forces support the notion of muscle
compartments. European Journal of Applied Physiology
88, 185-188.
DENNERLEIN, J.T., DIAO, E., MOTE, C.D., REMPEL, D.M., 1998.
Tensions of the flexor digitorum superficialis are
higher than a current model predicts. Journal of Bio-
mechanics 31, 295-301.
GAGNON, D., LARIVIERE, C., LOISEK, P., 2001. Comparative abi-
lity of EMG, optimization, and hybrid modelling ap-
proaches to predict trunk muscle forces and lumbar
spine loading during dynamic sagittal plane lifting.
Clinical Biomechanics 16, 359-372.
GORDON A.M., HUXLEY A.F., JULIAN F.J., 1966. The varia-
tion in isometric tension with sarcomere length in
vertebrate muscle fibres. Journal of Physiology 184,
170-192.
JENMALM, P. & JOHANSSON R. S. 1997. Visual and Somatosen-
sory Information about Object Shape Control Mani-
pulative Fingertip Forces. Journal of Neuroscience 17,
4486-4499
JORDAN K., PATAKY C., NEWELL K., 2005. Grip Width and the
Organization of Force Output. Journal of Motor Beha-
vior 37, 285-294.
KINOSHITA H., MURASE T., BANDOU T., 1996. Grip posture and
forces during holding cylindrical objects with circu-
lar grips. Ergonomics 39, 1163-1176.
KINOSHITA H., BACKSTROM L., FLANAGAN J.R., JOHANSSON R.S.,
1997. Tangential torque effects on the control of grip
forces when holding objects with a precision grip. Jour-
nal of Neurophysiology 78, 1619-1630.
KURSA, K., DIAO, E., LATTANZA, L., REMPEL, D., 2005. In vivo
forces generated by finger flexor muscles do not de-
pend on the rate of fingertip loading during an iso-
metric task. Journal of Biomechanics 38, 2288-2293.
LANDSMEER, J., 1961. Study in the anatomy of articulation
1. The equilibrium of the intercalated bone. Acta
Morphologica Neerlando-Scandinavica 3, 287-303.
MOMMERSTEEG, T.J.A., BLANKEVOORT, L., HUISKES, R., KOOLOOS,
J.G.M., KAUER, J.M.G., 1996. Characterization of the
mechanical behaviour of human knee ligaments : a
numerical-experimental approach. Journal of Biome-
chanics 29, 151-160.
RASMUSSEN, J., DAMSGAARD, M., VOIGT, M., 2001. Muscle re-
cruitment by the min/max criterion a comparative
numerical study. Journal of Biomechanics 34, 409-415.
SAKAI N., 2005. Finger motion analysis of the patients with
cervical myelopathy. Spine 30, 2777-2782.
SANCHO-BRU, J.L., PEREZ-GONZALEZ, A., VERGARA-MONEDERO, M.,
GIURINTAN, D.J., 2001. A 3-D dynamic model of human
finger for studying free movements. Journal of Biome-
chanics 34, 1491-500.
VALERO-CUEVAS, F.J., ZAJAC, F.E., BURGAR, C.G., 1998. Large
index-fingertip forces are produced by subject-inde-
pendent patterns of muscle excitation. Journal of Bio-
mechanics 31, 693-703.
VALERO-CUEVAS, F.J., TOWLES, J.D., HENTZ, V.R., 2000. Quanti-
fication of fingertip force reduction in the forefinger
following simulated paralysis of extensor and intrin-
sic muscles. Journal of Biomechanics 33, 1601-1609.
VIGOUROUX, L., QUAINE F., LABARRE-VILA A., AMARANTINI D. &
F. MOUTET, 2007. Using EMG data to constrain optimi-
zation procedure improves finger tendon tension es-
timations during static fingertip force production.
Journal of Biomechanics 40 2846-2856.
21 Modlisation biomcanique de la main
VIGOUROUX, L., QUAINE F., PACLET F., COLLOUD F. & MOUTET F.,
2008. Middle and ring fingers are more exposed to
pulley rupture than index and little during sport-
climbing : A biomechanical explanation. Clinical Bio-
mechanics 23, 562-570.
WESTLING G., JOHANSSON, R.S., 1984. Factors influencing the
force control during precision grip. Journal of Experi-
mental Brain Research 53, 277-284.
ZANCOLLI, E., 1979. Structural and dynamic bases of hand sur-
gery, 2
nd
ed. Philadelphia, Lippincott.
ZUSAMMENFASSUNG : Biomechanische Modellierung der Hand: Einfluss der Gegenstandscharakteristika
auf die Verteilung der Sehnenspannungen whrend einer Greifaufgabe (Jean-Claude Lyleire 2007
Preis, Bereich Naturwissenschaften)
Ziel dieser Studie war es, den Einfluss der Charakteristika eines Objektes (Gre und Masse) auf die Ske-
lettmuskelspannung bei einer Greifaufgabe zu definieren. Die Aufgabe bestand darin, ein Objekt, das mit
einem Kraftaufnehmer ausgestattet war und dessen Gre und Masse variierte, zwischen Daumen und
Zeigefinger festzuhalten. Die Haltung und auch die elektromyographische Aktivitt eines antagonisti-
schen Muskels wurden ebenfalls gemessen. Um die in den Muskelsehnen ausgebte Krfte zu bestim-
men, wurde eine biomechanische Modellierung zusammen mit einer Optimierungsprozedur, die uere
Krfte, kinematische Merkmale und EMG kombinierte, angewandt. Dieser Artikel beschrnkt sich einzig
auf die Ergebnisse hinsichtlich des Zeigefingers. Diese Ergebnisse zeigen, dass die Greifkraft, um das
Objekt zu halten, eine Funktion der Masse ist, aber was am meisten berrascht, auch mit der Gre des
Objekts ansteigt. Trotz der unterschiedlichen Haltungen der Finger und der unterschiedlichen EMG-
Aktivitten bleiben die Spannungsverhltnisse zwischen Muskelbeuger und uerer Kraft konstant,
unabhngig von Gre und Masse. Aufgrund dieser Ergebnisse stellen wir die Hypothese einer an Red-
undanz orientierten Kontrollstrategie auf und denken, dass die Versuchspersonen die Haltung und die
Spannungen der Antagonisten anpassen, um diese Ratio konstant zu halten. Die Ergebnisse stellen mg-
liche Anwendungen im Bereich der Ergonomie und des Gesundheitswesens in Aussicht.
SCHLAGWRTER : Modellierung, Biomechanik, Hand, Greifaufgabe, Gegenstandscharakteristika, muskulre Redundanz.
RESUMEN : Modelizacin biomecnica de la mano: Influencia de las caractersticas del objeto en la
distribucin de las tensiones de los tendones en una tarea a prehensin. (Prix Jean-Claude Lyleire
2007, Sciences de la vie et de la sant)
El objetivo de este estudio es definir la influencia de las caractersticas del objeto (talla y agrupa) soste-
nido en el momento de una tarea de prensin sobre las coacciones musculo-esquelticas. La tarea con-
siste en tener entre el pulgar y el ndice un objeto, instrumentado por un captador de fuerza, que hace
variar las caractersticas de talla y de peso. La postura as como la actividad electromiogrfica (EMG) de
un msculo antagonista fueron tambin recolectados. Con el fin de determinar las fuerzas ejercidas en
los tendones de los msculos, una modelizacin biomecnica asociada a un procedimiento de optimiza-
cin que combina los datos de fuerza externo(externa), de cinemtica y de EMG ha sido empleado. Este
artculo nicamente informa de los resultados vinculados al ndice.
Los resultados muestran que la fuerza de prensin ejercida para tener el objeto depende de la masa pero,
lo que es ms sorprendente, tambin aumenta con la talla del objeto. A pesar de las diferentes posturas
de dedos y la diferentes actividad EMG, los ratios tensiones de los msculos flexores / fuerzas externo
(externa) quedan constantes cualquiera sean las condiciones de talla y de masa. Estos resultados permite
emitir la hiptesis de una estrategia de control de la redundancia y dejan pensar que los sujetos adapta-
ran la postura y las tensiones de los msculos antagonistas para mantener este ratio constante. Los resul-
tados obtenidos permiten percibir aplicaciones potenciales en trminos de ergonoma y de salud.
PALABRAS CLAVES : modelizacin biomecnica, mano, tareas de tomar, caractersticas del objeto, redundancia muscular.
Mathieu Domalain Laurent Vigouroux ric Berton 22
RIASSUNTO : Modellizzazione biomeccanica della mano: influenza delle caratteristiche delloggetto
sulla distribuzione delle tensioni nei tendini durante un compito di prensione (Prix Jean-Claude
Lyleire 2007, Scienze della vita e della salute)
Lobiettivo di questo studio era di definire linfluenza delle caratteristiche delloggetto (taglia e massa)
sostenuto durante un compito di prensione sulle restrizioni muscolo-scheletriche. Il compito consisteva
nel tenere tra il pollice e lindice un oggetto, strumentato da un captore di forza, in cui si facevano
variare le caratteristiche di taglia e di peso. Erano ugualmente raccolte la postura cos come lattivit elet-
tromiografia (EMG) di un muscolo antagonista. Al fine di determinare le forze esercitate sui tendini dei
muscoli, stata impiegata una modellizzazione biomeccanica associata ad una procedura di ottimizza-
zione combinante i dati di forza esterna, di cinematica e di EMG. Questo articolo riporta unicamente i
risultati legati allindice. I risultati mostrano che la forza di prensione esercitata per tenere loggetto
funzione della massa ma, ci che pi sorprendente, aumenta ugualmente con la taglia delloggetto.
Malgrado le differenti posture delle dita e le differenti attivit di EMG, i rapporti delle percentuali di
tensione dei muscoli flessori/forza esterna restano costanti qualunque siano le condizioni di taglia e di
massa. Questo risultato ci fa emettere lipotesi di una strategia di controllo della ridondanza e lasciano
pensare che i soggetti adotterebbero la postura e le tensioni dei muscoli antagonisti per mantenere
costante questa percentuale. I risultati ottenuti permettono di percepire delle applicazioni potenziali in
termini di ergonomia e di salute.
PAROLE CHIAVE : caratteristiche delloggetto, compito di presa, mano, modellizzazione biomeccanica, ridondanza
muscolare.
Vous aimerez peut-être aussi
- Le Management de La Force de Vente Support 2Document73 pagesLe Management de La Force de Vente Support 2Soufiane Cherif100% (1)
- 08 Cours Travail Force Energie Mecanique MelissoDocument5 pages08 Cours Travail Force Energie Mecanique MelissoAZIAKOUPas encore d'évaluation
- 10 29000-Rumelide 817008-1366091Document19 pages10 29000-Rumelide 817008-1366091gnouna12Pas encore d'évaluation
- Calendrier Previsionnel These 1.2Document5 pagesCalendrier Previsionnel These 1.2Wassim CharmantPas encore d'évaluation
- 37 Denombrements CorrigeDocument10 pages37 Denombrements CorrigeYassine BenabdellahPas encore d'évaluation
- Dwnload Full Analog Circuit Design Discrete and Integrated 1st Edition Franco Solutions Manual PDFDocument36 pagesDwnload Full Analog Circuit Design Discrete and Integrated 1st Edition Franco Solutions Manual PDFlincolnrod80100% (16)
- Grille Bfem TroisiemeDocument5 pagesGrille Bfem Troisiemepapeefi93Pas encore d'évaluation
- COUR DE COMPTES TOGO AUDIT Thème 1Document42 pagesCOUR DE COMPTES TOGO AUDIT Thème 1Pascal SindiePas encore d'évaluation
- Immunite CoursDocument14 pagesImmunite CoursJulien GhandourPas encore d'évaluation
- 11 Technique D'expression3Document17 pages11 Technique D'expression3Imene BrbPas encore d'évaluation
- Plan de Travail 3Document1 pagePlan de Travail 3Fabienne GillardPas encore d'évaluation
- Passerelle Primaire Admis 2023-2024Document6 pagesPasserelle Primaire Admis 2023-2024Chaymah ChoubouPas encore d'évaluation
- Les Lettres AdministrativesDocument7 pagesLes Lettres AdministrativesAyman LamzouriPas encore d'évaluation
- Sup Deco Institut Mercure Cours Compta AnalytiqueDocument57 pagesSup Deco Institut Mercure Cours Compta AnalytiqueCheikhou Dia100% (1)
- Art-Pie 1er Régiment d'Artillerie-à-Pied (Dunkerque, Calais, Boulogne)Document22 pagesArt-Pie 1er Régiment d'Artillerie-à-Pied (Dunkerque, Calais, Boulogne)DUCHAUSSOYPas encore d'évaluation
- L'impact Du Choix Des FournisseursDocument9 pagesL'impact Du Choix Des FournisseursMamadou SYPas encore d'évaluation
- Dossier Technique RéviséDocument10 pagesDossier Technique RéviséJalal Ke100% (2)
- Le TANTRA Et Le Massage Tantrique.Document15 pagesLe TANTRA Et Le Massage Tantrique.Alexandra GalvezPas encore d'évaluation
- DS1 4si2 2015-2016Document2 pagesDS1 4si2 2015-2016PROF PROFPas encore d'évaluation
- Architecture J2 EEDocument27 pagesArchitecture J2 EEFaiçal YahiaPas encore d'évaluation
- Integrer Un PDF Dans Un Site PDFDocument3 pagesIntegrer Un PDF Dans Un Site PDFlydiaberthomieuPas encore d'évaluation
- BUDAI Erika - Les SirenesDocument9 pagesBUDAI Erika - Les SirenesHélène RichardeauPas encore d'évaluation
- MONS Rue de Nimy (TEC) MONS Grands Prés (TEC) : Votre Trajet en Quelques ChiffresDocument1 pageMONS Rue de Nimy (TEC) MONS Grands Prés (TEC) : Votre Trajet en Quelques ChiffresPernelle DPas encore d'évaluation
- Adobe Illustrator CC Le Support de Cours OfficielDocument479 pagesAdobe Illustrator CC Le Support de Cours OfficielAly Bernard Ndiaye86% (7)
- Compte-Rendu Diagnostic Et ExpertiseDocument23 pagesCompte-Rendu Diagnostic Et ExpertiseM'hamdi EzdiharPas encore d'évaluation
- PNL - SubmodalitesDocument7 pagesPNL - SubmodalitessoriboPas encore d'évaluation
- Ces Aliments Que L'on Peut Consommer Après La Date de Péremption - Santé MagazineDocument3 pagesCes Aliments Que L'on Peut Consommer Après La Date de Péremption - Santé MagazinekiamgoPas encore d'évaluation
- 2008 Position de L'exiléDocument25 pages2008 Position de L'exilé1234Pas encore d'évaluation
- Le Risque D'inondationDocument13 pagesLe Risque D'inondationcasaouis02Pas encore d'évaluation
- E Vocabulaire GeometriqueDocument23 pagesE Vocabulaire Geometriqueadel kaisPas encore d'évaluation