Vous aimerez peut-être aussi
- Usure Des Contacts Mécaniques. Problématique Et DéfinitionsDocument10 pagesUsure Des Contacts Mécaniques. Problématique Et DéfinitionssalvadorPas encore d'évaluation
- Modèle Exemple de Diagramme de Gantt Excel GratuitDocument1 pageModèle Exemple de Diagramme de Gantt Excel GratuitsalvadorPas encore d'évaluation
- Joints HomocinétiquesDocument16 pagesJoints HomocinétiquessalvadorPas encore d'évaluation
- Etude Expérimentale Et Numérique de La Conductivité Thermique D'un Composite Chaux-ChanvreDocument10 pagesEtude Expérimentale Et Numérique de La Conductivité Thermique D'un Composite Chaux-ChanvresalvadorPas encore d'évaluation
- Étude Expérimentale, Théorique Et Numérique de L'élasticité de Composites Chaux-ChanvreDocument7 pagesÉtude Expérimentale, Théorique Et Numérique de L'élasticité de Composites Chaux-ChanvresalvadorPas encore d'évaluation
- Hary3 7 - 2Document17 pagesHary3 7 - 2salvadorPas encore d'évaluation
- Monnaie Servitude Et LiberteDocument1 pageMonnaie Servitude Et Libertesalvador50% (2)
- Béton de MiscanthusDocument2 pagesBéton de MiscanthussalvadorPas encore d'évaluation
- Évaluation Et Amélioration de La Qualité D'interface Dans Les Bétons de Granulats VégétauxDocument1 pageÉvaluation Et Amélioration de La Qualité D'interface Dans Les Bétons de Granulats VégétauxsalvadorPas encore d'évaluation
- Absorption de L'eau Et Son Effet Sur La Durabilité Des Bétons de Sable Allégés Par Ajout de Copeaux de Bois - ImpDocument7 pagesAbsorption de L'eau Et Son Effet Sur La Durabilité Des Bétons de Sable Allégés Par Ajout de Copeaux de Bois - Impsalvador100% (1)
- 2015 01 16 Premier Beton Structurant BiosourceDocument2 pages2015 01 16 Premier Beton Structurant BiosourcesalvadorPas encore d'évaluation
- Caractéristiques de Bétons Légers À Base de Résidus D'exploitation de Carrières Et de Bois - ImpDocument4 pagesCaractéristiques de Bétons Légers À Base de Résidus D'exploitation de Carrières Et de Bois - ImpsalvadorPas encore d'évaluation
- Béton de Chanvre Influence de La Compacité Et Des Granulats Sur Les Caractéristiques MécaniquesDocument10 pagesBéton de Chanvre Influence de La Compacité Et Des Granulats Sur Les Caractéristiques MécaniquessalvadorPas encore d'évaluation
- Secret Pour Apprendre A Avoir de L Argent PDFDocument10 pagesSecret Pour Apprendre A Avoir de L Argent PDFsalvador100% (1)
- Equivalencekva ADocument1 pageEquivalencekva Aradn23Pas encore d'évaluation
- Génie RuralDocument2 pagesGénie Ruralsalvador100% (2)
- Protocole Pycnométrie À L'hélium PDFDocument2 pagesProtocole Pycnométrie À L'hélium PDFsalvadorPas encore d'évaluation
- Experiences Archimede PDFDocument15 pagesExperiences Archimede PDFsalvadorPas encore d'évaluation
- Post Doc Inifuge LMDC 2018-2Document1 pagePost Doc Inifuge LMDC 2018-2salvadorPas encore d'évaluation
- 02 1 4 Descriptions Mohr PDFDocument4 pages02 1 4 Descriptions Mohr PDFsalvadorPas encore d'évaluation
- 12 Traitement Des Boues D'épurationDocument33 pages12 Traitement Des Boues D'épurationsalvadorPas encore d'évaluation
- Cours TD Matrice InertieDocument24 pagesCours TD Matrice InertieSoundous TayssirPas encore d'évaluation
- DM PiegeageDocument10 pagesDM PiegeageNawres AbbessiPas encore d'évaluation
- Syllabus de Stabilité Mafuta PDFDocument91 pagesSyllabus de Stabilité Mafuta PDFAnge Berna MabikaPas encore d'évaluation
- Calcul Des Structures - STABILITE - Chapitre IIDocument12 pagesCalcul Des Structures - STABILITE - Chapitre IIBrahim MouhcinePas encore d'évaluation
- Mecanique 1BTSDocument30 pagesMecanique 1BTSKonan Wilfried100% (1)
- Cours de Physique Générale CHPDocument102 pagesCours de Physique Générale CHPSimonPas encore d'évaluation
- 13 Statique CoursGJDocument6 pages13 Statique CoursGJRadwane LourhmatiPas encore d'évaluation
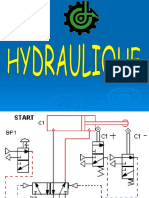
- HYDRAULIQUEDocument71 pagesHYDRAULIQUEKhalid Saadaoui67% (3)
- A - Actions Mécaniques (Généralités) : Assistance Technique D'ingénieurDocument10 pagesA - Actions Mécaniques (Généralités) : Assistance Technique D'ingénieurOusmane NiangPas encore d'évaluation
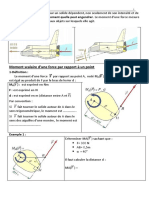
- TP 14 2sc Équilibre D'un Solide Mobile Autour D'un Axe FixeDocument3 pagesTP 14 2sc Équilibre D'un Solide Mobile Autour D'un Axe FixesaanounPas encore d'évaluation
- Support Mesures Lectriques PDFDocument38 pagesSupport Mesures Lectriques PDFsouadPas encore d'évaluation
- Chapitre II 3Document23 pagesChapitre II 3yosser machouchePas encore d'évaluation
- C 4 Momentetcoupleel 1Document8 pagesC 4 Momentetcoupleel 1Samba SallPas encore d'évaluation
- PC 1bac Tome 1 SX SM FDocument46 pagesPC 1bac Tome 1 SX SM Fصابور العربيPas encore d'évaluation
- Travaux Diriges Mecanique Du Solide IndeformableDocument4 pagesTravaux Diriges Mecanique Du Solide Indeformablec1765186Pas encore d'évaluation
- Physique - Lycee de Banyo - Evaluations Harmonisees de La 2ème Sequence - Seconde (2nde C) CamerounDocument2 pagesPhysique - Lycee de Banyo - Evaluations Harmonisees de La 2ème Sequence - Seconde (2nde C) CamerounmiguelemmuelPas encore d'évaluation
- 01-Cours Actions MécaniquesDocument2 pages01-Cours Actions MécaniquesF1R3 F0XPas encore d'évaluation
- Série Phy RotationDocument2 pagesSérie Phy Rotationkhadija20kha280Pas encore d'évaluation
- Méthode Du Bras de LevierDocument1 pageMéthode Du Bras de Leviertheo theoPas encore d'évaluation
- Statique L1 BTPDocument101 pagesStatique L1 BTPDjibril GABRIELPas encore d'évaluation