Vous aimerez peut-être aussi
- L'Interface Parallele 8255ADocument30 pagesL'Interface Parallele 8255ARima ChemloulPas encore d'évaluation
- TD Pic 16f84proposé Par Rachid BoutsaidDocument13 pagesTD Pic 16f84proposé Par Rachid BoutsaidWhatSoAverPas encore d'évaluation
- Correction TD 4 1Document17 pagesCorrection TD 4 1Kouraichi Zeineb100% (1)
- ch4 PDFDocument20 pagesch4 PDFYAMALEUPas encore d'évaluation
- Cours 68 HC 11 V 31Document55 pagesCours 68 HC 11 V 31Zineddine El Mehdi MustaphaPas encore d'évaluation
- CHAPITRE II Circuits SéquentielsDocument35 pagesCHAPITRE II Circuits SéquentielsTimble PuteurPas encore d'évaluation
- Chapitre 1 EtudiantDocument4 pagesChapitre 1 EtudiantChristianPas encore d'évaluation
- Reseau MobileDocument9 pagesReseau MobilefatimaPas encore d'évaluation
- TP FlowcodeDocument11 pagesTP Flowcodekurts010Pas encore d'évaluation
- Circuits Electriques Et Electroniques. Blancs 2017Document7 pagesCircuits Electriques Et Electroniques. Blancs 2017Alain GeoffroyPas encore d'évaluation
- Leçon A3-2 - Notion D'interruptionDocument6 pagesLeçon A3-2 - Notion D'interruptionMehdi Bouchami100% (1)
- Upload - Résumé Du Cours-Microcontroleurs - 2016-2017Document7 pagesUpload - Résumé Du Cours-Microcontroleurs - 2016-2017Habib Ben AmmarPas encore d'évaluation
- Variateur de Vitesse Pour Moteur MonophaséDocument9 pagesVariateur de Vitesse Pour Moteur MonophaséJIHENE GHAOUIPas encore d'évaluation
- Cours-Programmation C Pour Systèmes Embarqués-InternetDocument49 pagesCours-Programmation C Pour Systèmes Embarqués-InternetOmar KhayyamPas encore d'évaluation
- 02-Document Ressource Configuration Broche PWMDocument3 pages02-Document Ressource Configuration Broche PWMnawzatPas encore d'évaluation
- TP N °1: Vérin:: Commande Par Microprocesseur 6809Document10 pagesTP N °1: Vérin:: Commande Par Microprocesseur 6809Mouhcine Ben MoussaPas encore d'évaluation
- TP Initiation A La Programmation Du C PIC 16F84A en Mikro CDocument6 pagesTP Initiation A La Programmation Du C PIC 16F84A en Mikro CPaty MuyengwaPas encore d'évaluation
- Cours Microcontrôleur Microprocesseur 66 PDFDocument28 pagesCours Microcontrôleur Microprocesseur 66 PDFAbderrahim RiadPas encore d'évaluation
- Exo Distributeur de BoissonsDocument2 pagesExo Distributeur de BoissonsMila z100% (1)
- Formation ArduinoDocument37 pagesFormation ArduinobadanePas encore d'évaluation
- PIC en C - FonctionsDocument17 pagesPIC en C - FonctionsHaythem FerjaniPas encore d'évaluation
- Questionnaire 2Document3 pagesQuestionnaire 2mohammed hammoumiPas encore d'évaluation
- Serie TD6Document7 pagesSerie TD6Sarah NourPas encore d'évaluation
- Rlire FipDocument23 pagesRlire FipOussama ObPas encore d'évaluation
- Chapitre III Fonctionnement de PIC 16F84Document24 pagesChapitre III Fonctionnement de PIC 16F84Sanae BOUNOUAPas encore d'évaluation
- C Memoire2 PDFDocument5 pagesC Memoire2 PDFMohammed ElbachiriPas encore d'évaluation
- LabviewDocument19 pagesLabviewtortorouPas encore d'évaluation
- Programmation Avancée Avec Les Microcontrôleurs STM32Document70 pagesProgrammation Avancée Avec Les Microcontrôleurs STM32El Hassane MakboubPas encore d'évaluation
- Microcontroleur PIC16F84Document33 pagesMicrocontroleur PIC16F84redaPas encore d'évaluation
- Réalisation Et Automatisation D'une Machine de Remplissage de Bouteilles Des JusDocument81 pagesRéalisation Et Automatisation D'une Machine de Remplissage de Bouteilles Des JusNouhaila ADBIBPas encore d'évaluation
- Chap 2 Cours Systemes Embarques Reseaux Locaux CommunicationDocument33 pagesChap 2 Cours Systemes Embarques Reseaux Locaux CommunicationAmira Warhéni100% (1)
- Cours DSP 2020-Programmation - 43Document44 pagesCours DSP 2020-Programmation - 43Youssef Mahdi0% (1)
- Pic 16F876-77Document73 pagesPic 16F876-77Ayman Brs100% (1)
- Corrigé - Devoir 1 - 19-20 - GM2Document2 pagesCorrigé - Devoir 1 - 19-20 - GM2Elglitia MohamedPas encore d'évaluation
- TP Moto 6809Document7 pagesTP Moto 6809gamerzxs681Pas encore d'évaluation
- Mini ProjetDocument18 pagesMini ProjetAli AourdouPas encore d'évaluation
- Chapitre 4 Alimentation - Moteur - Pas - À - PasDocument37 pagesChapitre 4 Alimentation - Moteur - Pas - À - Paskhaled100% (1)
- Iugetchapitre 1 PDFDocument10 pagesIugetchapitre 1 PDFFabrice FotsoPas encore d'évaluation
- Souris - OrdinateurDocument8 pagesSouris - OrdinateurFOUAD EL BRAHMI100% (6)
- 06 PIC Les InterruptionsDocument12 pages06 PIC Les Interruptionsfatima khdidrPas encore d'évaluation
- 1 Architecture de 8255Document10 pages1 Architecture de 8255Yogbake HansPas encore d'évaluation
- Cours Architecture Aux MicrocontrôleursDocument49 pagesCours Architecture Aux MicrocontrôleursDALII100% (1)
- Conversion PDFDocument25 pagesConversion PDFLam NovoxPas encore d'évaluation
- B11 TPDocument15 pagesB11 TPAziz RajawiPas encore d'évaluation
- Capteur QCMDocument6 pagesCapteur QCMIsmail el jadidiPas encore d'évaluation
- Chapitre 3 Le Microcontroleur Pic 16f84Document29 pagesChapitre 3 Le Microcontroleur Pic 16f84Samen LempirePas encore d'évaluation
- TD 1Document2 pagesTD 1sanonhanifah294Pas encore d'évaluation
- Igsit - Automatisme - MicrocontrôleursDocument77 pagesIgsit - Automatisme - MicrocontrôleursMohamed Salim Compaore100% (1)
- Codeur Incremental PDFDocument5 pagesCodeur Incremental PDFAdil AbouelhassanPas encore d'évaluation
- Afficheur LCDDocument5 pagesAfficheur LCDmatacaohdPas encore d'évaluation
- Travaux Pratiques Electronique NumériqueDocument10 pagesTravaux Pratiques Electronique NumériqueOumaima RhayaPas encore d'évaluation
- Systèmes EmbarquésDocument34 pagesSystèmes Embarquésjames noobPas encore d'évaluation
- Matière Electronique Systèmes PDFDocument71 pagesMatière Electronique Systèmes PDFYassine BelhmerPas encore d'évaluation
- Chapitre IV Programmation PIC 16F84Document12 pagesChapitre IV Programmation PIC 16F84Sanae BOUNOUAPas encore d'évaluation
- 5 Cours AresDocument23 pages5 Cours AresAwatef MekkiPas encore d'évaluation
- Afficheur DynamiqueDocument12 pagesAfficheur DynamiqueKhalil HsainePas encore d'évaluation
- 2020 2021 Commande Optimale LQ ProjectionDocument18 pages2020 2021 Commande Optimale LQ ProjectionMouad EL JazouliPas encore d'évaluation
- Twistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesD'EverandTwistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesPas encore d'évaluation
- Récupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueD'EverandRécupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriquePas encore d'évaluation
- Notes de Cours Circuits InterfacesDocument43 pagesNotes de Cours Circuits InterfacesAbderrazzak RialiPas encore d'évaluation
- Interfaçage Du Microprocesseur 8086Document29 pagesInterfaçage Du Microprocesseur 8086Abderrazzak Riali50% (2)
- Timer8253 8254Document23 pagesTimer8253 8254Abderrazzak Riali100% (1)
- TP Filtre NumériqueDocument19 pagesTP Filtre NumériqueAbderrazzak RialiPas encore d'évaluation
- 6moteur Pas A PasDocument31 pages6moteur Pas A PasAbderrazzak RialiPas encore d'évaluation
- TP ChronometreDocument4 pagesTP ChronometreAbderrazzak Riali100% (1)
- Le Boîtier D'ordinateurDocument5 pagesLe Boîtier D'ordinateuririe100% (1)
- Solution Examen LAT315 2017Document3 pagesSolution Examen LAT315 2017Babi Ben80% (5)
- LandTiger Programmation - rr1Document122 pagesLandTiger Programmation - rr1nad_chadi8816Pas encore d'évaluation
- TP5: Les Compteurs: 1 - Réalisation D'un Compteur Asynchrone ModuloDocument3 pagesTP5: Les Compteurs: 1 - Réalisation D'un Compteur Asynchrone ModuloHAMZA AIT HAMMOUPas encore d'évaluation
- Petit Lexique Anglais-Francais À L'usage Des ÉlectroniciensDocument7 pagesPetit Lexique Anglais-Francais À L'usage Des ÉlectroniciensizoukaaPas encore d'évaluation
- Crs VHDL VFDocument9 pagesCrs VHDL VFtahiri.ahmed2005Pas encore d'évaluation
- Performances Des ProcesseursDocument29 pagesPerformances Des ProcesseursSalas Salvador DiosdadoPas encore d'évaluation
- Programmation Assembleur 8086Document51 pagesProgrammation Assembleur 8086zied harchayPas encore d'évaluation
- Manual m4n78 ProDocument0 pageManual m4n78 ProsolilopiPas encore d'évaluation
- Aller 7 Carte MéreDocument3 pagesAller 7 Carte MéreSlimen Mohamed SadokPas encore d'évaluation
- TP1 Circuit LogiqueDocument21 pagesTP1 Circuit LogiqueoumarPas encore d'évaluation
- Présentation Compilation AFDDocument9 pagesPrésentation Compilation AFDsssPas encore d'évaluation
- Technologie Des Circuits IntegresDocument5 pagesTechnologie Des Circuits IntegresBourgui Ibrahim100% (1)
- CalmDocument8 pagesCalmFlavien Raymond AndriatsihoaranaPas encore d'évaluation
- Chapitre3 FPGADocument36 pagesChapitre3 FPGASaa AidPas encore d'évaluation
- Exposé N°1 - Multicoeurs Core I7Document14 pagesExposé N°1 - Multicoeurs Core I7Evan StatykPas encore d'évaluation
- Conception Des Systèmes de Mémoire1Document16 pagesConception Des Systèmes de Mémoire1Romaissa MessPas encore d'évaluation
- Chapitre 3Document49 pagesChapitre 3Hamza BeninePas encore d'évaluation
- Micro 8Document15 pagesMicro 8yahya hamdaniPas encore d'évaluation
- Rapport de PFE FinalDocument45 pagesRapport de PFE FinalSleh Eddine67% (3)
- Base Sequentielle PDFDocument51 pagesBase Sequentielle PDFsaidPas encore d'évaluation
- Cours P1Document179 pagesCours P1Mohamed Souibgui100% (1)
- Chap3 Introduction Aux MicrocontroleursDocument8 pagesChap3 Introduction Aux Microcontroleursadamdagdoug26Pas encore d'évaluation
- L'informatique de A À Z PDFDocument713 pagesL'informatique de A À Z PDFMamison RandriamalalaPas encore d'évaluation
- msp430 I2c Problems - MSP Low-Power Microcontroller Forum - MSP Low-Power Microcontrollers - TI E2E Support ForumsDocument8 pagesmsp430 I2c Problems - MSP Low-Power Microcontroller Forum - MSP Low-Power Microcontrollers - TI E2E Support ForumsnonoPas encore d'évaluation
- ModélisationDocument67 pagesModélisationAbdo Ait JaPas encore d'évaluation
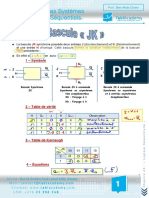
- 06 - Bascule - JKDocument1 page06 - Bascule - JKRayen GuissoumaPas encore d'évaluation
- TD Electronique Numerique Iut KDG - 033436Document7 pagesTD Electronique Numerique Iut KDG - 033436Mahama KaborePas encore d'évaluation
- TP 1 Les BasculesDocument4 pagesTP 1 Les BasculesAmm BouPas encore d'évaluation
- Chapitre 1 Et Chapitre 2 AODocument42 pagesChapitre 1 Et Chapitre 2 AOÑį HăđPas encore d'évaluation