Vous aimerez peut-être aussi
- Projets Arduino avec Tinkercad: Concevoir et programmer des projets basés sur Arduino avec TinkercadD'EverandProjets Arduino avec Tinkercad: Concevoir et programmer des projets basés sur Arduino avec TinkercadÉvaluation : 1 sur 5 étoiles1/5 (1)
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Projets Arduino avec Tinkercad | Partie 2: Concevoir des projets électroniques avancés basés sur Arduino avec TinkercadD'EverandProjets Arduino avec Tinkercad | Partie 2: Concevoir des projets électroniques avancés basés sur Arduino avec TinkercadPas encore d'évaluation
- Filtrage en RadarDocument177 pagesFiltrage en RadarMariamPas encore d'évaluation
- Chroniques Oubliées Contemporain - Recueil de ScénariosDocument106 pagesChroniques Oubliées Contemporain - Recueil de ScénariosAZERTY QWERTYH100% (1)
- L'Usine Marémotrice de La RanceDocument45 pagesL'Usine Marémotrice de La RanceSalem ARIFPas encore d'évaluation
- Le Microcontroleur PIC16F876Document13 pagesLe Microcontroleur PIC16F876hmema13Pas encore d'évaluation
- Eau Chaude Sanitaire PDFDocument8 pagesEau Chaude Sanitaire PDFcp1r3s0% (1)
- DSP ExerciceDocument15 pagesDSP ExerciceMerit Khaled100% (1)
- Presentation Du Pic 16f877 PDFDocument22 pagesPresentation Du Pic 16f877 PDFKiadam Kitou100% (1)
- Transfert De Puissance Sans Fil: Recharger les véhicules électriques pendant qu'ils sont sur la routeD'EverandTransfert De Puissance Sans Fil: Recharger les véhicules électriques pendant qu'ils sont sur la routePas encore d'évaluation
- TPTS2revision-entree-sortie AnalogiquesDocument7 pagesTPTS2revision-entree-sortie AnalogiquesHaddouPas encore d'évaluation
- Programmation Des PIC en C Part2Document34 pagesProgrammation Des PIC en C Part2marocainissamPas encore d'évaluation
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Cours Sur Le Disque DurDocument11 pagesCours Sur Le Disque DurHabib FayePas encore d'évaluation
- C Avancé 2022Document178 pagesC Avancé 2022Hamza El mamounPas encore d'évaluation
- Chapitre 5 VHDLDocument91 pagesChapitre 5 VHDLdhdhPas encore d'évaluation
- TPDocument24 pagesTPAlassane Diouf100% (3)
- CoursmicroreduitDocument87 pagesCoursmicroreduitapi-3826166100% (2)
- Corrige TD3Document3 pagesCorrige TD3Es.sabery IsmailPas encore d'évaluation
- Chapitre 10 Interruptions en MikrocDocument6 pagesChapitre 10 Interruptions en MikrocMedPas encore d'évaluation
- Correction TD 1Document5 pagesCorrection TD 1noubissi pascakPas encore d'évaluation
- Chapitre 9 Les Timers en MikrocDocument14 pagesChapitre 9 Les Timers en MikrocRadwane LourhmatiPas encore d'évaluation
- 4 HG0201 Enonce PDFDocument2 pages4 HG0201 Enonce PDFbougherara100% (1)
- IsostatismeDocument36 pagesIsostatismedidinedPas encore d'évaluation
- 580 680 570 670 Reparatie PDFDocument309 pages580 680 570 670 Reparatie PDFGeorge Geo75% (4)
- Chapitre 6 Les TimersDocument4 pagesChapitre 6 Les TimersReda LhajPas encore d'évaluation
- 16FXXXDocument86 pages16FXXXkhmPas encore d'évaluation
- Chapitre 8 Usart Spi I2c Dans Avr AtmegaDocument46 pagesChapitre 8 Usart Spi I2c Dans Avr Atmegaisl dz100% (1)
- Les Pic 16F877Document14 pagesLes Pic 16F877Haythem FerjaniPas encore d'évaluation
- Chap 3-MicrocontroleurDocument35 pagesChap 3-MicrocontroleurYosra rhim YosraPas encore d'évaluation
- Les Microcontrôleurs de La Famille PICDocument75 pagesLes Microcontrôleurs de La Famille PICNabil DakhliPas encore d'évaluation
- TP Initiation A La Programmation Du C PIC 16F84A en Mikro CDocument6 pagesTP Initiation A La Programmation Du C PIC 16F84A en Mikro CPaty MuyengwaPas encore d'évaluation
- Cours MicrocontrrolleurDocument65 pagesCours MicrocontrrolleurCrypto Sylvain100% (1)
- Les Microcontrôleurs PIC de MicrochipDocument28 pagesLes Microcontrôleurs PIC de MicrochipMohamed CoulibalyPas encore d'évaluation
- TP S EmbarquéDocument77 pagesTP S EmbarquéSalahe LaouarPas encore d'évaluation
- Programmation Assembleur 8086Document51 pagesProgrammation Assembleur 8086zied harchayPas encore d'évaluation
- 02 - Microcontroleur de La Famille PIC PDFDocument59 pages02 - Microcontroleur de La Famille PIC PDFFarid Afifi100% (1)
- Presentation Du Pic 16f877 PDFDocument22 pagesPresentation Du Pic 16f877 PDFyoussefPas encore d'évaluation
- Cours - Composants Logiques Programmables Et VHDLDocument141 pagesCours - Composants Logiques Programmables Et VHDLYoussef Elalaoui0% (1)
- Microcontroleur Harvard Pic16f84 - CompressDocument5 pagesMicrocontroleur Harvard Pic16f84 - CompressMeziane BelkacemPas encore d'évaluation
- Travaux Dirigés-Microprocesseur MicrocontroleurDocument18 pagesTravaux Dirigés-Microprocesseur MicrocontroleurFatima BettayebPas encore d'évaluation
- Cours-No-03 Calculateur Et InterfaçageDocument11 pagesCours-No-03 Calculateur Et Interfaçagestone freePas encore d'évaluation
- TP 2:programmation en Assembleur: I. ObjectifsDocument4 pagesTP 2:programmation en Assembleur: I. Objectifsyoussef_dabliz100% (1)
- Exercice 21 - 22 - 23Document8 pagesExercice 21 - 22 - 23Riham abPas encore d'évaluation
- TD 2+correctionDocument5 pagesTD 2+correctionSoulaimenPas encore d'évaluation
- Mini Projet Thermomètre À Base de Pic 16F877Document10 pagesMini Projet Thermomètre À Base de Pic 16F877Manel Ouled Ahmed100% (1)
- 68 HC 11Document15 pages68 HC 11Abdelhadi TaoufikPas encore d'évaluation
- TD N - 1architecture PDFDocument2 pagesTD N - 1architecture PDFABDELKARIM AINPas encore d'évaluation
- Le Pic 16f877Document5 pagesLe Pic 16f877karam karamPas encore d'évaluation
- Micro ControleurDocument56 pagesMicro ControleurYounes Akakba100% (1)
- TP2 MicroprocesseurDocument14 pagesTP2 MicroprocesseurAdem AounPas encore d'évaluation
- TD 1 MicroControleurDocument1 pageTD 1 MicroControleurimenenouvelle100% (1)
- Exercice 0:: Tp1: Architecture Des MicrocontroleursDocument3 pagesExercice 0:: Tp1: Architecture Des MicrocontroleursأمينPas encore d'évaluation
- 2018TP2 8086Document8 pages2018TP2 8086Behij ben amor100% (1)
- E X Memoire2Document3 pagesE X Memoire2حميد خلفاوي100% (1)
- Carte Numerique QuartusDocument26 pagesCarte Numerique QuartusAdiouma DiopPas encore d'évaluation
- Les Circuits Logiques Programmables FPGADocument29 pagesLes Circuits Logiques Programmables FPGAOUSSAMA ELHJOUJI0% (1)
- Les Compteurs ISISDocument10 pagesLes Compteurs ISISDiego MezaPas encore d'évaluation
- Modelsim QuartusDocument23 pagesModelsim QuartusAli AlFiguiguiPas encore d'évaluation
- Les Microcontrôleurs PICDocument26 pagesLes Microcontrôleurs PICMøhãmëd BåkKäriPas encore d'évaluation
- 04 Microprocesseur 8086Document18 pages04 Microprocesseur 8086nesrine ninaPas encore d'évaluation
- Pic 16 FDocument20 pagesPic 16 FMarie MimiiPas encore d'évaluation
- TP Pic en CDocument4 pagesTP Pic en CelevePas encore d'évaluation
- Architecture Des Systèmes À Microprocesseur TP N°2: Timer / Génération de Signal PWMDocument20 pagesArchitecture Des Systèmes À Microprocesseur TP N°2: Timer / Génération de Signal PWMAwatef MessaoudiPas encore d'évaluation
- Twistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesD'EverandTwistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesPas encore d'évaluation
- Note de Calcul PoutreDocument6 pagesNote de Calcul PoutreAno Nymous ProPas encore d'évaluation
- CIABO ASP Presentation Des Travaux SDM01!02!07!08!09 Odpe Ageroute + AnnexesDocument94 pagesCIABO ASP Presentation Des Travaux SDM01!02!07!08!09 Odpe Ageroute + AnnexesbossPas encore d'évaluation
- TDN°4 FiltrageDocument2 pagesTDN°4 FiltrageIsmail Lasri100% (1)
- Tutoriel Etablissements Origine Adele FRDocument7 pagesTutoriel Etablissements Origine Adele FRPamela TitoPas encore d'évaluation
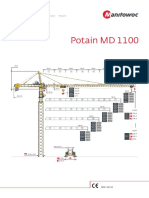
- R3t1fnhswjbl9uxvpotain MD 1100 Tower Crane NetworkDocument8 pagesR3t1fnhswjbl9uxvpotain MD 1100 Tower Crane Networkubeydullah coşkunPas encore d'évaluation
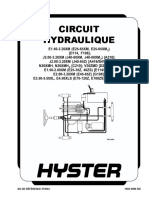
- Circuit HydrauliqDocument90 pagesCircuit Hydrauliqsafwen ranenPas encore d'évaluation
- As 70671 LR-Z SG 470FR FR 1056-2Document2 pagesAs 70671 LR-Z SG 470FR FR 1056-2a.ghani BaRaCuDaPas encore d'évaluation
- Cours Simplifie La Liaison CompleteDocument3 pagesCours Simplifie La Liaison CompleteMohammed DahbiPas encore d'évaluation
- IND2201 PresentationDocument2 pagesIND2201 PresentationCharles-André GuénettePas encore d'évaluation
- Analyse Fonctionnel PROJETDocument8 pagesAnalyse Fonctionnel PROJETMajda BelkhaouiPas encore d'évaluation
- PcastucesDocument108 pagesPcastucesmohamed rifkiPas encore d'évaluation
- XMLRPCDocument4 pagesXMLRPCElhadji Malick GayePas encore d'évaluation
- L'artichaut de Madagascar Aux PommuiesDocument7 pagesL'artichaut de Madagascar Aux Pommuiesfrederic bertrandPas encore d'évaluation
- Commande FacturationDocument10 pagesCommande FacturationXavier Le Roy100% (1)
- TC Qqla 27464Document174 pagesTC Qqla 27464Sabri Naima GhoutiaPas encore d'évaluation
- Plafond Filtrant: Dimensions GénériquesDocument1 pagePlafond Filtrant: Dimensions GénériquesDjamal MohammediPas encore d'évaluation
- Emd2 Info4 2014Document2 pagesEmd2 Info4 2014Amar AlichePas encore d'évaluation
- Choix D'un Vérin PDFDocument2 pagesChoix D'un Vérin PDFKarem JebrilPas encore d'évaluation
- STR00 - FONDATIONS - RESEAUX SOUS-DALLE-Layout1Document1 pageSTR00 - FONDATIONS - RESEAUX SOUS-DALLE-Layout1dimitri tchabouPas encore d'évaluation
- Beton Arme Cours Complet Chap9 PDFDocument47 pagesBeton Arme Cours Complet Chap9 PDFTOVIHO SessinouPas encore d'évaluation
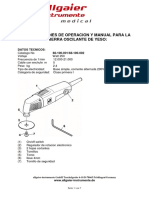
- ManualDocument7 pagesManualGomez, Francisco (AJR)Pas encore d'évaluation
- DS de Thermodynamique Avec QCM Du 19 Janvier 2013 + CorrigéDocument10 pagesDS de Thermodynamique Avec QCM Du 19 Janvier 2013 + CorrigéRodrigue patrice Njounhassi koagnePas encore d'évaluation