Vous aimerez peut-être aussi
- I-Objectif:: TP 1: ThermoconductivitéDocument12 pagesI-Objectif:: TP 1: ThermoconductivitéMaryPas encore d'évaluation
- Chapitre Prise en Charge ESP32 Sur IDE ArduinoDocument53 pagesChapitre Prise en Charge ESP32 Sur IDE ArduinoPaul Yarro100% (4)
- Partie3 Microcontroleur s4 E2iDocument9 pagesPartie3 Microcontroleur s4 E2iMoha BenmohaPas encore d'évaluation
- TP MicrocontrôleurDocument38 pagesTP MicrocontrôleurNourallah Aouina100% (3)
- Nouveau Microsoft Word DocumentDocument9 pagesNouveau Microsoft Word DocumentNawres MsakniPas encore d'évaluation
- Cours ArduinoDocument100 pagesCours ArduinoAmil DhafPas encore d'évaluation
- Arduino PDFDocument29 pagesArduino PDFAbeddaa AyaPas encore d'évaluation
- Cours-Module APDocument27 pagesCours-Module APBoualem MokhtariaPas encore d'évaluation
- ArduinoDocument10 pagesArduinoUani KacoPas encore d'évaluation
- Notes Du Cours de Systemes EmbarquesDocument50 pagesNotes Du Cours de Systemes EmbarquesJeriel EpPas encore d'évaluation
- IntroductionDocument10 pagesIntroductionSheym bngPas encore d'évaluation
- Carte Arduino UnoDocument23 pagesCarte Arduino UnoSimou Zomi100% (1)
- Document Sur La Carte Esp32Document10 pagesDocument Sur La Carte Esp32Khawla AmeurPas encore d'évaluation
- Cours MC Chapitre 2Document7 pagesCours MC Chapitre 2admmehdiPas encore d'évaluation
- Initiation Aux Microcontrôleurs dsPIC30FDocument10 pagesInitiation Aux Microcontrôleurs dsPIC30Fanon_72023590100% (1)
- Documentation InterruptionsDocument14 pagesDocumentation Interruptionszbhp zPas encore d'évaluation
- Model Cours - CopieDocument9 pagesModel Cours - Copieabid alyaniPas encore d'évaluation
- 00 Untitled - 15Document46 pages00 Untitled - 15admmehdiPas encore d'évaluation
- Compte RenduDocument5 pagesCompte RenduAlaa MessaoudPas encore d'évaluation
- Arduino1 PDFDocument52 pagesArduino1 PDFMansour Chaaben100% (2)
- SIN - 1 - 6 - ETAPE1 - Principe de La Communication en SerieDocument19 pagesSIN - 1 - 6 - ETAPE1 - Principe de La Communication en SerieMahamat Youssouf YassirPas encore d'évaluation
- TP 4 Acquisition Des Données - ArduinoDocument7 pagesTP 4 Acquisition Des Données - ArduinoChorale Voix D'Anges Tunis100% (1)
- TP1 4Document22 pagesTP1 4Abderrahmane WrPas encore d'évaluation
- SIN - 1 - 6 - ETAPE1 - Principe de La Communication en SerieDocument19 pagesSIN - 1 - 6 - ETAPE1 - Principe de La Communication en SerieKéba GUEYEPas encore d'évaluation
- TP ArduinoDocument24 pagesTP Arduinoismail771100% (1)
- TP4 Initiation À L'arduinoDocument7 pagesTP4 Initiation À L'arduinoFeriel GhouilaPas encore d'évaluation
- TP02Document4 pagesTP02dbmariem8Pas encore d'évaluation
- Travaux Pratique 2 RLIDocument12 pagesTravaux Pratique 2 RLIKader AbdoulPas encore d'évaluation
- Upload - Résumé Du Cours-Microcontroleurs - 2016-2017Document7 pagesUpload - Résumé Du Cours-Microcontroleurs - 2016-2017Habib Ben AmmarPas encore d'évaluation
- Arduino Resume Cott3-16Document14 pagesArduino Resume Cott3-16Abdoul Rahamane Idi SouleyPas encore d'évaluation
- Tpii 2 PICDocument18 pagesTpii 2 PICkaoutarPas encore d'évaluation
- 0 andrianarimananaNomenjanaharyP - ESPA - Lic - 18 - 34 - 25Document19 pages0 andrianarimananaNomenjanaharyP - ESPA - Lic - 18 - 34 - 25admmehdiPas encore d'évaluation
- Le Microcontroleur PIC16F876Document13 pagesLe Microcontroleur PIC16F876hmema13Pas encore d'évaluation
- Chapitre 3 Mise en Œuvre Des Microcontrôleurs AVR - CopieDocument18 pagesChapitre 3 Mise en Œuvre Des Microcontrôleurs AVR - Copiejulio KetchaPas encore d'évaluation
- Chapitre 2: ATMEGA328PDocument23 pagesChapitre 2: ATMEGA328PWassim0% (1)
- CH 3Document38 pagesCH 3aissat mohammedPas encore d'évaluation
- TP Pcsi Ci6 ArduinoDocument11 pagesTP Pcsi Ci6 ArduinoMiguel Josue LpPas encore d'évaluation
- InternetDesObjets 2Document26 pagesInternetDesObjets 2marwaPas encore d'évaluation
- Chap 2Document19 pagesChap 2AGESE 2MPSEPas encore d'évaluation
- Annexes Mikropascal 1Document6 pagesAnnexes Mikropascal 1Mohamed Ali TaheurPas encore d'évaluation
- TP PicDocument6 pagesTP Piczineb amirPas encore d'évaluation
- Carte Ni-Usb 6008Document6 pagesCarte Ni-Usb 6008demy_c328Pas encore d'évaluation
- UEF1212 Cahier TD_TP 2024Document90 pagesUEF1212 Cahier TD_TP 2024adel.ghanemPas encore d'évaluation
- Le Pic 16f628 LivreDocument70 pagesLe Pic 16f628 LivreAna MusraPas encore d'évaluation
- TP ArduinoDocument18 pagesTP ArduinoRadhwen DALY HAMDOUNI100% (4)
- TR Ordo ArduinoDocument8 pagesTR Ordo ArduinoSmart ClassePas encore d'évaluation
- ESP-32 Dev Kit C V2_FRDocument30 pagesESP-32 Dev Kit C V2_FRtijione6.8Pas encore d'évaluation
- Cours 14 - Carte ARDUINO UNO Microcontrôleur ATMega328Document2 pagesCours 14 - Carte ARDUINO UNO Microcontrôleur ATMega328ismail smailPas encore d'évaluation
- Examen 2013 (ACAD)Document4 pagesExamen 2013 (ACAD)zakiPas encore d'évaluation
- TP ArduinoDocument24 pagesTP ArduinopfePas encore d'évaluation
- 2 CH Sensor Suhu DS1820 LM35Document6 pages2 CH Sensor Suhu DS1820 LM35ImanuelPas encore d'évaluation
- Pic 16 F 877Document6 pagesPic 16 F 877خالد زايوPas encore d'évaluation
- Chapitr IDocument18 pagesChapitr IHabib GherairPas encore d'évaluation
- TP - Programmation D'un PIC Avec FlowcodeDocument15 pagesTP - Programmation D'un PIC Avec FlowcodeMaha BouattourPas encore d'évaluation
- Microcontrôleur Famille PIC 16oDocument10 pagesMicrocontrôleur Famille PIC 16oAbdellah Faqdani100% (1)
- Pic 16F84 PDFDocument21 pagesPic 16F84 PDFAhmed JanatiPas encore d'évaluation
- Uef1212 TP1 2020Document74 pagesUef1212 TP1 2020hit masterPas encore d'évaluation
- NanoDocument3 pagesNanoMimi NourPas encore d'évaluation
- Projets Arduino avec Tinkercad: Concevoir et programmer des projets basés sur Arduino avec TinkercadD'EverandProjets Arduino avec Tinkercad: Concevoir et programmer des projets basés sur Arduino avec TinkercadÉvaluation : 1 sur 5 étoiles1/5 (1)
- Projets Arduino avec Tinkercad | Partie 2: Concevoir des projets électroniques avancés basés sur Arduino avec TinkercadD'EverandProjets Arduino avec Tinkercad | Partie 2: Concevoir des projets électroniques avancés basés sur Arduino avec TinkercadPas encore d'évaluation
- Arduino Pas à pas: Le guide ultime du débutant avec les bases du matériel, du logiciel, de la programmation et des projetsD'EverandArduino Pas à pas: Le guide ultime du débutant avec les bases du matériel, du logiciel, de la programmation et des projetsÉvaluation : 4 sur 5 étoiles4/5 (1)
- Machines de Jeux: Architecture des Consoles de Jeux VidéoD'EverandMachines de Jeux: Architecture des Consoles de Jeux VidéoÉvaluation : 3.5 sur 5 étoiles3.5/5 (2)
- Chapitre 1Document49 pagesChapitre 1Kamal ZeghdarPas encore d'évaluation
- BENAHMED Canevas EvaluationDocument21 pagesBENAHMED Canevas EvaluationKamal ZeghdarPas encore d'évaluation
- Mmoire DEGAICHIA IBGok-1Document84 pagesMmoire DEGAICHIA IBGok-1Kamal ZeghdarPas encore d'évaluation
- Chap01 Généralité Sur Les OSDocument7 pagesChap01 Généralité Sur Les OSKamal ZeghdarPas encore d'évaluation
- Projet Ordonnancement Des Tâches Avec ArduinoDocument9 pagesProjet Ordonnancement Des Tâches Avec ArduinoalinPas encore d'évaluation
- Utilisation Du Multimetre NumeriqueDocument3 pagesUtilisation Du Multimetre NumeriqueNourdine RifkiPas encore d'évaluation
- 30 Sur PC Portable Gaming HP Victus 15-Fb0160nf 15,6 AMD Ryzen 5 16 Go RAM 512 Go SSD Argent Mica - PC Portable - Achat & PriDocument1 page30 Sur PC Portable Gaming HP Victus 15-Fb0160nf 15,6 AMD Ryzen 5 16 Go RAM 512 Go SSD Argent Mica - PC Portable - Achat & PriWillingGhost 8Pas encore d'évaluation
- M2N-Vm Dvi: Quick Start GuideDocument38 pagesM2N-Vm Dvi: Quick Start Guideiohuik cdcdsPas encore d'évaluation
- Architecture Des OrdinateursDocument56 pagesArchitecture Des OrdinateursAna HackerPas encore d'évaluation
- Électronique de Puissance Laboratoire Nº1 Simulation Des Convertisseurs StatiquesDocument5 pagesÉlectronique de Puissance Laboratoire Nº1 Simulation Des Convertisseurs StatiquesFake ShtemaruPas encore d'évaluation
- Langage Assembleur (SIBABI) Cours en Ligne PDFDocument177 pagesLangage Assembleur (SIBABI) Cours en Ligne PDFperpetuePas encore d'évaluation
- Memoire Uvci-MtnciDocument105 pagesMemoire Uvci-Mtncinicaise djuePas encore d'évaluation
- Code erreur ISI-صور-2Document6 pagesCode erreur ISI-صور-2Ayoub LahmarPas encore d'évaluation
- P02b MemDocument19 pagesP02b MemJackson NguengaPas encore d'évaluation
- Architecture de L'ordinateurDocument10 pagesArchitecture de L'ordinateurAbdul Jalil SanaPas encore d'évaluation
- TPN1: Redressement Monophasé À Diode Un Redresseur Double Alternance Monophasée: Est UnDocument13 pagesTPN1: Redressement Monophasé À Diode Un Redresseur Double Alternance Monophasée: Est UnBilal CrosPas encore d'évaluation
- Chapitre 02 Architecture Microprocesseur - LFSJG11Document19 pagesChapitre 02 Architecture Microprocesseur - LFSJG11Faïza TabbanaPas encore d'évaluation
- TD de MicroP Et MicroC - Master IEADocument2 pagesTD de MicroP Et MicroC - Master IEAAymard MougouPas encore d'évaluation
- Initiation Info - 2022 2023 BGMDocument41 pagesInitiation Info - 2022 2023 BGMguytanoh690Pas encore d'évaluation
- Fiche D'inventaire Des Matériels Et MobiliersDocument3 pagesFiche D'inventaire Des Matériels Et Mobiliersべなぼう もうたりPas encore d'évaluation
- Support Cours MicrocontroleursDocument80 pagesSupport Cours MicrocontroleursJrk MukalayPas encore d'évaluation
- Projet Mini Robot SolaireDocument17 pagesProjet Mini Robot SolaireKouraichi ZeinebPas encore d'évaluation
- Eln Tp1 Boulanouar SarraDocument12 pagesEln Tp1 Boulanouar SarraPoupée De SoiePas encore d'évaluation
- Liste Des AppareilsDocument2 pagesListe Des AppareilsGermany de la CemacPas encore d'évaluation
- Fiche Projet de Licence: Faculté D'electronique Et D'informatique Département D'informatiqueDocument2 pagesFiche Projet de Licence: Faculté D'electronique Et D'informatique Département D'informatiqueIslem BounatiroPas encore d'évaluation
- Support de Cours N 5 - Gestion Des GPIOsDocument6 pagesSupport de Cours N 5 - Gestion Des GPIOsmanarPas encore d'évaluation
- Cours Electronique de Puissance EPDocument49 pagesCours Electronique de Puissance EPfarid saadPas encore d'évaluation
- Cours Faiseaux HertzienDocument15 pagesCours Faiseaux Hertzienben mohamed dossoPas encore d'évaluation
- Disque, Base de Données, SSL, Bande Passante Illimitée, Baie de Stockage SSDDocument47 pagesDisque, Base de Données, SSL, Bande Passante Illimitée, Baie de Stockage SSDShayna MagdaoPas encore d'évaluation
- Ccna3 V6-TP Packet - Tracert-1.2.1.7Document10 pagesCcna3 V6-TP Packet - Tracert-1.2.1.7Soro SoroPas encore d'évaluation
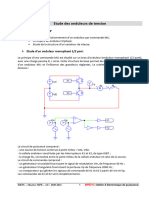
- Etude Des Onduleurs de TensionDocument5 pagesEtude Des Onduleurs de TensionNaima mecherguiPas encore d'évaluation
- Gaspoz PDFDocument334 pagesGaspoz PDFEdouard IsmaelPas encore d'évaluation
- EDP Ch03 Redresseur Commande V2Document15 pagesEDP Ch03 Redresseur Commande V2الخوداري نهالPas encore d'évaluation