Vous aimerez peut-être aussi
- Regression Non Lineaire Suite Correction Moindres CarrésDocument4 pagesRegression Non Lineaire Suite Correction Moindres CarrésKawtar Ait naniPas encore d'évaluation
- Econométrie I Chap IVDocument16 pagesEconométrie I Chap IVYannick BambaraPas encore d'évaluation
- Maths Centrale PSI 2002 M2 (Enoncé)Document6 pagesMaths Centrale PSI 2002 M2 (Enoncé)LM --Pas encore d'évaluation
- SERIE TD2 - Cinematique - 2020 2021Document10 pagesSERIE TD2 - Cinematique - 2020 2021Nowe AhmadePas encore d'évaluation
- TES. Statistiques 2 Page 2Document4 pagesTES. Statistiques 2 Page 2Maxime LefevrePas encore d'évaluation
- Fiche 1 RevisionDocument6 pagesFiche 1 RevisionSouad LAOUZAPas encore d'évaluation
- Mini Projet DDocument10 pagesMini Projet DNivek LenasarienPas encore d'évaluation
- Interpolation PDFDocument3 pagesInterpolation PDFMajed JallouliPas encore d'évaluation
- CH7CSSMAS5Document11 pagesCH7CSSMAS5hadiaamhine99Pas encore d'évaluation
- 22-23 - M135 - Correction de La Série N°2Document15 pages22-23 - M135 - Correction de La Série N°2Yassine Er-rabbanyPas encore d'évaluation
- Séminaire 7 - Concept-Simple-MultipleDocument92 pagesSéminaire 7 - Concept-Simple-MultipleMohammed Amine MargoumPas encore d'évaluation
- Econométrie I: Mounir JERRY Année Universitaire 2021-2022Document68 pagesEconométrie I: Mounir JERRY Année Universitaire 2021-2022hamada helalaPas encore d'évaluation
- Applications Line AiresDocument10 pagesApplications Line AiresMed RhaiouzPas encore d'évaluation
- TD3 L3 Anum1Document3 pagesTD3 L3 Anum1Youssef EL MLILI100% (1)
- 7 - Dynamique Des StructuresDocument4 pages7 - Dynamique Des StructuresBilal LasmiPas encore d'évaluation
- BAC 2009 SENEGAL Maths - S2 - S2A - S4 - S5Document2 pagesBAC 2009 SENEGAL Maths - S2 - S2A - S4 - S5Elji JalloPas encore d'évaluation
- Numi2 PDFDocument34 pagesNumi2 PDFMoulayMoulyPas encore d'évaluation
- 6 RegressionLineaireSimpleDocument31 pages6 RegressionLineaireSimplebouchenebPas encore d'évaluation
- S ERIE 3 de M.Econom EtriquesDocument3 pagesS ERIE 3 de M.Econom EtriquesAmine StiouniPas encore d'évaluation
- Slides 5 - EconoDocument6 pagesSlides 5 - EconoLouisRemPas encore d'évaluation
- IntégrationsDocument15 pagesIntégrationsidraissadanouePas encore d'évaluation
- Solution TD3Document11 pagesSolution TD3Souid GhadaPas encore d'évaluation
- 2018 Cor Bac DDocument5 pages2018 Cor Bac DJosuéPas encore d'évaluation
- 30 Matrices CorrigeDocument11 pages30 Matrices CorrigeJules AlgorPas encore d'évaluation
- Exo 2 Pompe Hydraulique CorrigeDocument4 pagesExo 2 Pompe Hydraulique Corrigeesloch100% (1)
- TD - 2 - Fonctions de Deux Variables - Première PartieDocument2 pagesTD - 2 - Fonctions de Deux Variables - Première Partiesamba4169Pas encore d'évaluation
- TD2201 ReponsesDocument5 pagesTD2201 ReponsesDavid SalahPas encore d'évaluation
- Exam 2 H11Document7 pagesExam 2 H11shylamoPas encore d'évaluation
- Corrigé Math 2011 Session Pple PDFDocument10 pagesCorrigé Math 2011 Session Pple PDFWalid ZouaouiPas encore d'évaluation
- Sec X 2008 Maths1 MPDocument4 pagesSec X 2008 Maths1 MPAbdo WaBPas encore d'évaluation
- GMM Devoir - Mstat - 2020 2021Document3 pagesGMM Devoir - Mstat - 2020 2021Mano AgbodoPas encore d'évaluation
- Iut Pftin 2009Document3 pagesIut Pftin 2009demo hackPas encore d'évaluation
- Equations DifférentiellesDocument10 pagesEquations DifférentiellesJoseph EKANGPas encore d'évaluation
- ECONOMETRIEDocument16 pagesECONOMETRIEÀbdèrràhim AboussemdaiPas encore d'évaluation
- Ecole de L'air - PC / PSI - 4 HeuresDocument3 pagesEcole de L'air - PC / PSI - 4 Heuresapi-3762501Pas encore d'évaluation
- Exposé Soumaya PrésentationDocument17 pagesExposé Soumaya PrésentationManal KhalifaPas encore d'évaluation
- Méthode - Chapitre 2 - InterpolationDocument7 pagesMéthode - Chapitre 2 - InterpolationJAMILA CIPas encore d'évaluation
- VF 23Document22 pagesVF 23Doha El jaadiPas encore d'évaluation
- Examen LST-GMDocument2 pagesExamen LST-GMMonir BenaniPas encore d'évaluation
- TD2 3Document3 pagesTD2 3babasPas encore d'évaluation
- SERIE TD2 - Cinematique - 2020 2021Document10 pagesSERIE TD2 - Cinematique - 2020 2021Awatif BePas encore d'évaluation
- S7-Dynamique II - Série-CorrigéDocument5 pagesS7-Dynamique II - Série-CorrigéKartigenPas encore d'évaluation
- Quadri QuesDocument3 pagesQuadri QuesDoucet LeloPas encore d'évaluation
- TD4 Algebre 1 2020 21Document2 pagesTD4 Algebre 1 2020 21youssefbenguenny4Pas encore d'évaluation
- td2 - Correction ÉconométrieDocument6 pagestd2 - Correction ÉconométrieHassan AsserrarPas encore d'évaluation
- Chapitre 1Document33 pagesChapitre 1Nour ElhoudaPas encore d'évaluation
- Cours Analyse Des Données Premiere Annee Master MFBDocument126 pagesCours Analyse Des Données Premiere Annee Master MFBayoubhaouasPas encore d'évaluation
- 3 Séries Statistiques DoublesDocument12 pages3 Séries Statistiques DoubleslvtmathPas encore d'évaluation
- Tstat 2Document12 pagesTstat 2Bae GRANDERPas encore d'évaluation
- 2-Interpolation de NewtonDocument16 pages2-Interpolation de NewtonSeif FathalliPas encore d'évaluation
- TD 1Document4 pagesTD 1Thierry Gnasiri Godwe HinsouPas encore d'évaluation
- COURS MNA - IntegrationDocument11 pagesCOURS MNA - IntegrationAya SlimaniPas encore d'évaluation
- Cours 1Document10 pagesCours 1SriPas encore d'évaluation
- TD4Document2 pagesTD4tizie junior TIZIEPas encore d'évaluation
- Fic 00060Document6 pagesFic 00060Med ELPas encore d'évaluation
- Analyse 4-Serie 1Document2 pagesAnalyse 4-Serie 1ramzikaid9Pas encore d'évaluation
- Calcul Différentiel 1 Feuille de TD N 2Document2 pagesCalcul Différentiel 1 Feuille de TD N 2Test32Pas encore d'évaluation
- I) de Quoi S'agit-Il ?: e 2 Sin ZDocument2 pagesI) de Quoi S'agit-Il ?: e 2 Sin Zmaryem hamzaPas encore d'évaluation
- Courbure EnonceDocument2 pagesCourbure Enonceseljohann16Pas encore d'évaluation
- Etude Métrique Des CourbesDocument9 pagesEtude Métrique Des CourbesTanankemPas encore d'évaluation
- 3 Formation Covadis Projet Par Profil Type - Watermark PDFDocument133 pages3 Formation Covadis Projet Par Profil Type - Watermark PDFHarice MoussangoPas encore d'évaluation
- Lecon 216Document24 pagesLecon 216Youssef ZentarPas encore d'évaluation
- 4M Serie1 - Parabole 2020 CorDocument4 pages4M Serie1 - Parabole 2020 CorBelgasem AsselPas encore d'évaluation
- 4-Tracé en Plan (ch2)Document17 pages4-Tracé en Plan (ch2)Seif17Pas encore d'évaluation
- Chingatome Ressource 2nd Fonctions-Du-Second-Degre symetrieSecondDegreDocument1 pageChingatome Ressource 2nd Fonctions-Du-Second-Degre symetrieSecondDegreanas sdnPas encore d'évaluation
- Exam Imp 2017Document2 pagesExam Imp 2017Boris Djomo HappiPas encore d'évaluation
- Feuille de Calcul Réservoir ElliptiqueDocument2 pagesFeuille de Calcul Réservoir ElliptiqueKhaled FatnassiPas encore d'évaluation
- Cours M1Document66 pagesCours M1Çrâzÿ MkàwdàPas encore d'évaluation
- These 1938 205 1 0Document139 pagesThese 1938 205 1 0TekitoPas encore d'évaluation
- MVA006 ndc04Document12 pagesMVA006 ndc04اشر اقPas encore d'évaluation
- Raccordements CirculairesDocument5 pagesRaccordements CirculairesEtienne kongui TounkaraPas encore d'évaluation
- ConiquesDocument5 pagesConiqueskaniki kunPas encore d'évaluation
- Les Splines CubiquesDocument9 pagesLes Splines CubiquesNadiaa AdjoviPas encore d'évaluation
- Fic00115 2Document17 pagesFic00115 2Med LghPas encore d'évaluation
- Math 7 C Coniques 2 Sur 4Document7 pagesMath 7 C Coniques 2 Sur 4El Kharashi CsaPas encore d'évaluation
- Cours - Coniques 9Document7 pagesCours - Coniques 9SCRIBD CONTACTPas encore d'évaluation
- 4 Cours Etudes Des FonctionsDocument1 page4 Cours Etudes Des FonctionscherniPas encore d'évaluation
- Chapitre II Tracé en Plan 18 - 19Document14 pagesChapitre II Tracé en Plan 18 - 19Sara Benameur100% (1)
- Dérivation Et Intégration Des Fonctions VectoriellesDocument13 pagesDérivation Et Intégration Des Fonctions VectoriellesJihane HammoutPas encore d'évaluation
- Cad-Way FraDocument180 pagesCad-Way FraKamel NaitPas encore d'évaluation
- Cours 08 ConiquesDocument24 pagesCours 08 ConiquesPeuito100% (1)
- MNM1 Corr Doc2Document61 pagesMNM1 Corr Doc2Mohamed DallagiPas encore d'évaluation
- Mc2exercicesetexamens08 PDFDocument48 pagesMc2exercicesetexamens08 PDFMohamed ArabPas encore d'évaluation
- Derivee Lecture Graphique 2Document2 pagesDerivee Lecture Graphique 2Abdel YasserPas encore d'évaluation
- Orthodromie 4Document4 pagesOrthodromie 4Mohcine LaminePas encore d'évaluation
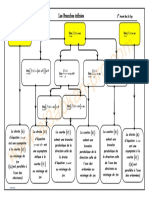
- Résume 4 de Cours Branches InfiniesDocument1 pageRésume 4 de Cours Branches InfiniesC'est Yana100% (2)
- Les Raccordements À Rayons ProgressifsDocument20 pagesLes Raccordements À Rayons ProgressifsAbdellatif KhafifPas encore d'évaluation
- TP N°1 - Courbes de Bézier Et Algorithme de CasteljauDocument4 pagesTP N°1 - Courbes de Bézier Et Algorithme de Casteljauscatt44Pas encore d'évaluation
- Les 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonD'EverandLes 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonPas encore d'évaluation