Vous aimerez peut-être aussi
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Corrigé TD 15 - Liaisons - Schéma CinématiqueDocument6 pagesCorrigé TD 15 - Liaisons - Schéma Cinématiquebhs channelPas encore d'évaluation
- DS1 StatiqueDocument5 pagesDS1 StatiqueYassinePas encore d'évaluation
- Corr TD 2 Theorie de Mecanisme PDFDocument3 pagesCorr TD 2 Theorie de Mecanisme PDFMélèk BejiPas encore d'évaluation
- Corrige Examen TM 2018Document5 pagesCorrige Examen TM 2018FAWZI RONALDOPas encore d'évaluation
- Devoir de Maison Janvier 2021Document17 pagesDevoir de Maison Janvier 2021soulaima khederPas encore d'évaluation
- 3-Schématisaton Et Analyse Cinématique PDFDocument15 pages3-Schématisaton Et Analyse Cinématique PDFhamzaPas encore d'évaluation
- Mecanismes PDFDocument34 pagesMecanismes PDFesloch50% (2)
- Ve ReglableDocument27 pagesVe Reglableachaboy167% (3)
- SERIE TD2 - Cinematique - 2020 2021Document10 pagesSERIE TD2 - Cinematique - 2020 2021Nowe AhmadePas encore d'évaluation
- Cours Theorie Des Mecanismes PDFDocument12 pagesCours Theorie Des Mecanismes PDFmaraghni_hassine7592100% (2)
- TD 17 Corrigé - Liaisons ÉquivalentesDocument6 pagesTD 17 Corrigé - Liaisons ÉquivalentesJawad Hamriti50% (2)
- Cours EngrenagesDocument5 pagesCours EngrenagesJesuis ContentPas encore d'évaluation
- TD - Théorie Des Mécanismes Pompe À Piston Radial: CorrigéDocument8 pagesTD - Théorie Des Mécanismes Pompe À Piston Radial: Corrigéسكينة مريم100% (2)
- Correction TD 3 Schéma CinématiqueDocument7 pagesCorrection TD 3 Schéma CinématiqueShooting StarPas encore d'évaluation
- CI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxDocument6 pagesCI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxIsmail El MoufakirPas encore d'évaluation
- Ds Mef 2011 GCV PDFDocument3 pagesDs Mef 2011 GCV PDFMed Hacen MoustaphaPas encore d'évaluation
- Examen Theorie Des Mécanismes 2016 (Solution)Document3 pagesExamen Theorie Des Mécanismes 2016 (Solution)Abdou EssamyPas encore d'évaluation
- Les Machines À Commande NumériqueDocument9 pagesLes Machines À Commande NumériqueSemi ZoghlamiPas encore d'évaluation
- TD Trains Epicycloidaux PDFDocument3 pagesTD Trains Epicycloidaux PDFHechmi Chermiti100% (2)
- TD 22 - Comportement Statique Des SystèmesDocument6 pagesTD 22 - Comportement Statique Des Systèmesbhs channelPas encore d'évaluation
- Guidage en Translation ProfDocument12 pagesGuidage en Translation Profslimani abdelilahPas encore d'évaluation
- Guidage en TranslationDocument6 pagesGuidage en TranslationKamel Bousnina0% (1)
- 17 Train ÉpicycloïdauxDocument9 pages17 Train Épicycloïdauxzouhour brahmiPas encore d'évaluation
- Théorie Des Mécanismes L3Document15 pagesThéorie Des Mécanismes L3Shake SpearePas encore d'évaluation
- 2011 2012 MP TD Theorie Des MecanismesDocument4 pages2011 2012 MP TD Theorie Des MecanismesJaouad El50% (4)
- PTSI - TD Analyse Des MecanismesDocument6 pagesPTSI - TD Analyse Des MecanismesprincePas encore d'évaluation
- FormualireDocument5 pagesFormualireAdil Hassani IdrissiPas encore d'évaluation
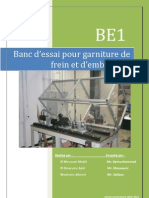
- Rapport BE1Document51 pagesRapport BE1ahmed017100% (1)
- COURS Théorie Des Mécanismes PDFDocument5 pagesCOURS Théorie Des Mécanismes PDFMohamed NaciriPas encore d'évaluation
- Simulation D'usinage PDFDocument2 pagesSimulation D'usinage PDFPse Udo100% (1)
- (Tec) (TD) Dimensionnement de RoulementsDocument4 pages(Tec) (TD) Dimensionnement de RoulementsBouba Rabeb100% (2)
- Serie Des TD N°4 Engrenages EMDocument6 pagesSerie Des TD N°4 Engrenages EMGrine Salah EddinePas encore d'évaluation
- CS-TM1-TD Hyperstatisme Bielle Manivelle CorrectionDocument9 pagesCS-TM1-TD Hyperstatisme Bielle Manivelle CorrectionPierre LancelotPas encore d'évaluation
- Schema Cinematique Pour Une BrideDocument6 pagesSchema Cinematique Pour Une BrideNeji Hmani100% (1)
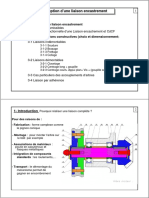
- Cours Liaison EncastrementDocument12 pagesCours Liaison Encastrementsou souPas encore d'évaluation
- Programmation Exercice N°2Document3 pagesProgrammation Exercice N°2mathieu.angeardPas encore d'évaluation
- Théorie Mecanismes Etude de Cas-Maxpid - PPSXDocument25 pagesThéorie Mecanismes Etude de Cas-Maxpid - PPSXMerv BoudaPas encore d'évaluation
- Mobilite Et HyperstatismeDocument7 pagesMobilite Et HyperstatismeFakhreddine Naimi100% (1)
- TD Train ÉpicycloïdalDocument5 pagesTD Train Épicycloïdalpapouch1350% (2)
- Table A ColonnesDocument1 pageTable A ColonnesAbdelali Yacoubi100% (1)
- Embrayage Frein Et ReducteurDocument7 pagesEmbrayage Frein Et ReducteurOtman OtoPas encore d'évaluation
- Chapitre 2 Torseur de CohesionDocument8 pagesChapitre 2 Torseur de CohesionAyou HamPas encore d'évaluation
- Chaines de Solides - Comportement CinématiqueDocument8 pagesChaines de Solides - Comportement CinématiqueAbdelali YacoubiPas encore d'évaluation
- Seie 4 Grafcet 3emeDocument3 pagesSeie 4 Grafcet 3emeSoumeya MachtaPas encore d'évaluation
- 8c64r Projection PDFDocument21 pages8c64r Projection PDFkhalid3mendounPas encore d'évaluation
- TD Révision Cinematique Du SolideDocument8 pagesTD Révision Cinematique Du SolideRomain MarroPas encore d'évaluation
- Résumé (Torsion)Document2 pagesRésumé (Torsion)Mohsen LaabidiPas encore d'évaluation
- 3-Calcul Des RessortsDocument3 pages3-Calcul Des RessortsChokri AtefPas encore d'évaluation
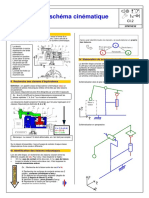
- 3 1 4 Schema CinematiqueDocument1 page3 1 4 Schema Cinematiquehitachi hadiPas encore d'évaluation
- Chapitre 2 - Méca Transf de Mvts Par Syst Bielle ManivelleDocument14 pagesChapitre 2 - Méca Transf de Mvts Par Syst Bielle Manivelleelking gingstarsPas encore d'évaluation
- (TDM) (CO) Theorie Des MecanismesDocument6 pages(TDM) (CO) Theorie Des MecanismesSimoMonkadPas encore d'évaluation
- 2 Contrôle GéoDocument8 pages2 Contrôle GéoNS ADPas encore d'évaluation
- ds20304r1 ModelDocument14 pagesds20304r1 ModelChokri Atef50% (2)
- Liaison EncastrementDocument9 pagesLiaison Encastrementsaded05Pas encore d'évaluation
- Exo 06 07 Corrige Chaines OuvertesDocument4 pagesExo 06 07 Corrige Chaines OuvertesAyoubPas encore d'évaluation
- TD Statique CinématiqueDocument5 pagesTD Statique CinématiqueNour Allah tabibPas encore d'évaluation
- TD Statique CinématiqueDocument5 pagesTD Statique CinématiqueAhmed fattoumPas encore d'évaluation
- EPL Physique 2003 CorrigeDocument5 pagesEPL Physique 2003 CorrigeMihindouPas encore d'évaluation
- Contrôle - Continu 1 2023 2024 CorrigéDocument8 pagesContrôle - Continu 1 2023 2024 CorrigéLodvert T. POATYPas encore d'évaluation
- BOUAISSI NomenclaturesDocument15 pagesBOUAISSI NomenclaturesOuafae BouchequifPas encore d'évaluation
- Cour MMTDocument34 pagesCour MMTsvans lmsvansiPas encore d'évaluation
- Ge40 011NDocument41 pagesGe40 011NeslochPas encore d'évaluation
- Les Specifications Etat de Surface PDFDocument1 pageLes Specifications Etat de Surface PDFeslochPas encore d'évaluation
- Cour MMTDocument34 pagesCour MMTsvans lmsvansiPas encore d'évaluation
- 10 - Variateurs Continus de VitesseDocument17 pages10 - Variateurs Continus de Vitesseesloch100% (1)
- Micro GeometrieDocument48 pagesMicro GeometrieeslochPas encore d'évaluation
- RugositeDocument11 pagesRugositeالقبطان القبطانPas encore d'évaluation
- 3 - Les FreinsDocument36 pages3 - Les FreinseslochPas encore d'évaluation
- 8 - Trains D'engrenagesDocument20 pages8 - Trains D'engrenageseslochPas encore d'évaluation
- 5 - Transmission Par CourroieDocument27 pages5 - Transmission Par Courroieesloch0% (1)
- 2 Les EmbrayagesDocument28 pages2 Les EmbrayageseslochPas encore d'évaluation
- 104 - TD Formes de MaintenanceDocument2 pages104 - TD Formes de MaintenanceeslochPas encore d'évaluation
- 4 - Roues de FrictionDocument8 pages4 - Roues de Frictionesloch100% (2)
- 6 - Transmission Par ChaineDocument10 pages6 - Transmission Par ChaineeslochPas encore d'évaluation
- 10 - Variateurs Continus de VitesseDocument17 pages10 - Variateurs Continus de Vitesseesloch100% (1)
- Mecanismes PDFDocument34 pagesMecanismes PDFesloch50% (2)
- PR Ése NtationDocument16 pagesPR Ése NtationeslochPas encore d'évaluation
- Cours 01Document21 pagesCours 01eslochPas encore d'évaluation
- Guide Cotation PDFDocument14 pagesGuide Cotation PDFRicardo SousaPas encore d'évaluation
- Transistor Bipolaire V2Document6 pagesTransistor Bipolaire V2eslochPas encore d'évaluation
- Document1 PDFDocument3 pagesDocument1 PDFeslochPas encore d'évaluation
- P3 Methodologie AMDECsur Une Activite de SoinsDocument39 pagesP3 Methodologie AMDECsur Une Activite de Soinsesloch100% (1)
- JarqueDocument3 pagesJarqueeslochPas encore d'évaluation
- Statistiques UnivarieesDocument19 pagesStatistiques Univarieestiwan_67Pas encore d'évaluation
- Micro GeometrieDocument48 pagesMicro GeometrieeslochPas encore d'évaluation
- Le Controle Des Petites SeriesDocument4 pagesLe Controle Des Petites Seriesesloch100% (1)
- TDM PilletDocument17 pagesTDM PilletIsmail SouhailPas encore d'évaluation
- C5 Etude Du Comportement Du MatérielDocument128 pagesC5 Etude Du Comportement Du Matérielesloch100% (1)
- C9 Durée de VieDocument47 pagesC9 Durée de Vieesloch100% (3)
- Elastic It eDocument220 pagesElastic It eJacques NdavaroPas encore d'évaluation
- 2STM CoursDocument83 pages2STM CoursOUTEMSAA100% (1)
- TD MNPT CorrigéDocument21 pagesTD MNPT Corrigéayoube mecaPas encore d'évaluation
- SERIEN°3MFDocument13 pagesSERIEN°3MFrachida lakaazPas encore d'évaluation
- ACFrOgCUICYcFXp0Y9w3pYcMxAtT8N9AqvXi8zDlE36SCap25JEl5N PR IBZC9RcZLtoOD7P4zsFnalAVQbfzsPx5VYT m5a3gWkcIjHSbjcen0sofigY9E9FdIH Rqmos7abdMdJmwNjhAf0MfDocument2 pagesACFrOgCUICYcFXp0Y9w3pYcMxAtT8N9AqvXi8zDlE36SCap25JEl5N PR IBZC9RcZLtoOD7P4zsFnalAVQbfzsPx5VYT m5a3gWkcIjHSbjcen0sofigY9E9FdIH Rqmos7abdMdJmwNjhAf0Mffadli younesPas encore d'évaluation
- Résumé2Document8 pagesRésumé2YURI 3.14Pas encore d'évaluation
- Cours de Mécanique Des Systèmes de Solides IndéformablesDocument88 pagesCours de Mécanique Des Systèmes de Solides IndéformablesSaraIdrissiPas encore d'évaluation
- Chapitre 3 Caracteristiques Geometriques Des Sections-1Document29 pagesChapitre 3 Caracteristiques Geometriques Des Sections-1youbi aurelPas encore d'évaluation
- Corrigé TD4 Phys Stat LST PA 23 24Document7 pagesCorrigé TD4 Phys Stat LST PA 23 24sihamarbaz14Pas encore d'évaluation
- 138 Ds Mpsi Et Pcsi CinematiqueDocument10 pages138 Ds Mpsi Et Pcsi CinematiqueFaical BharPas encore d'évaluation
- Exos HydrauliquesDocument7 pagesExos HydrauliquesOualid CatibPas encore d'évaluation
- FR Melangeur ContinuDocument2 pagesFR Melangeur ContinuBen Hamda FethiPas encore d'évaluation
- Cours Convection M2 PDFDocument30 pagesCours Convection M2 PDFMed ChouaybiPas encore d'évaluation
- P 231 - Exemple de Calcul - Mur Chargé Au VentDocument5 pagesP 231 - Exemple de Calcul - Mur Chargé Au VentLaurent INGEBETONPas encore d'évaluation
- Série N°4 Pertes de ChargesDocument11 pagesSérie N°4 Pertes de ChargesMohamed AnjamPas encore d'évaluation
- Loi de NewtonDocument1 pageLoi de NewtonVictoria DoscaPas encore d'évaluation
- Pompe Flowserve SIHI Mark 3 ISO Pièces de Rechange MontageDocument54 pagesPompe Flowserve SIHI Mark 3 ISO Pièces de Rechange MontageECO-TECH POMPEPas encore d'évaluation
- CCV 226 - Chapitres 14 - Déformations Et Limitation Des FlèchesDocument39 pagesCCV 226 - Chapitres 14 - Déformations Et Limitation Des FlèchesTareck Bou JaoudePas encore d'évaluation
- Corrigé TD 3 ELT 2021 2022Document3 pagesCorrigé TD 3 ELT 2021 2022Linda KoundziPas encore d'évaluation
- TP1 EmboutissageDocument9 pagesTP1 EmboutissageAmeni KhaledPas encore d'évaluation
- Suiveur Solaire PNT SANS CONCLUSION AbDocument32 pagesSuiveur Solaire PNT SANS CONCLUSION AbYoussef ArbaPas encore d'évaluation
- Tube de VenteriDocument8 pagesTube de VenteriBouafia Abdelrahmane0% (1)
- Livre Blanc Tech D'ingDocument121 pagesLivre Blanc Tech D'ings.for.saad8176Pas encore d'évaluation
- 3 - Chapitre III Prédimensionnements Des Elements StructurauxDocument11 pages3 - Chapitre III Prédimensionnements Des Elements StructurauxAmine FachaPas encore d'évaluation
- Chapitre 3 Ferraillage Des Éléments PorteursDocument15 pagesChapitre 3 Ferraillage Des Éléments PorteursNasro OuahabPas encore d'évaluation
- Memoire Commande Vectorielle Avec Observateur Interconnecté Pour La Machine AsynchroneDocument79 pagesMemoire Commande Vectorielle Avec Observateur Interconnecté Pour La Machine AsynchroneMahmoud SettouPas encore d'évaluation
- 1IMRT Exercices Sons-Ultrasons Corrige - 2Document3 pages1IMRT Exercices Sons-Ultrasons Corrige - 2Mohamed Ben AlayaPas encore d'évaluation
- (Cin) (TD) Centrifugeuse HumaineDocument5 pages(Cin) (TD) Centrifugeuse HumaineElbatouri Badr EddinePas encore d'évaluation
- Charges Par Essieu PDFDocument19 pagesCharges Par Essieu PDFKarim Zaza100% (1)
- EXP - Cours BA4 Compression Simple2015-2016Document40 pagesEXP - Cours BA4 Compression Simple2015-2016Edwige EdPas encore d'évaluation